1. Introduction
Distributed acoustic sensing (DAS) is a powerful fiber optic technique that can detect vibrations with a resolution of a few meters along a standard telecom glass fiber many tens of kilometers long. With these unique and still improving capabilities, DAS is increasingly used in applications such as intrusion detection along a perimeter, leak monitoring along pipelines, monitoring of sub-sea cables, or seismic monitoring [
1,
2,
3]. In these examples, the long-range sensing capabilities with a single fiber are used. Similarly, extended railway infrastructure is well-suited for DAS monitoring. By detecting the noise and vibrations caused by the train, it is possible to locate the train position, its velocity [
4,
5], and also its length, which may be important for confirming that no train cars have been decoupled. Thereby DAS may help to increase railway capacity by enabling efficient train driving and disposition, but more importantly by enabling moving block operation, if the safety-critical performance of DAS can be established. Further, not only can the train position and velocity be monitored, but, in principle, also faults of the train such as flat wheels, and wear in the train track can be detected due to their characteristic acoustic signatures [
6].
While DAS is not yet routinely used in train monitoring, it offers several advantages over established techniques such as a track circuit or wheel counters. In contrast to wheel counters at a limited number of positions, fiber optic sensing is a truly distributed measurement and monitors the position of the train at all times. With its sensing range of tens or even up to 100 km [
6] it eliminates the necessity of power and data cables because a single telecom fiber that often is already installed next to tracks can serve both, as sensor and data line. The DAS fiber is also immune to electromagnetic interference or lightning strike. In comparison to global navigation satellite systems, fiber sensing has the advantage of providing signals in tunnels and it does not need wireless communication between trains and base stations. Beyond train monitoring, events such as trespassing or cable theft can be detected with DAS. However, significant challenges remain before DAS can be implemented in routine railway operations.
A range of fiber optic DAS systems have been described in recent literature and significant progress has been made with respect to signal quality and sensing range. Fiber optic sensing techniques such strain sensors based on Brillouin scattering [
7,
8], fiber Bragg gratings and fiber interferometers [
9,
10] have been demonstrated in railway applications. However, most activities in the field of DAS have centered on Raleigh backscatter based (C-OTDR) systems [
6,
7,
11,
12]. Two main DAS techniques can be distinguished. On the one hand, there are simpler systems which only detect the vibration frequency but not the true signal amplitude or phase of the acoustic signal. On the other hand, there exist ‘true-phase’ DAS systems that enable quantitative measurement of the vibration and strain amplitude of the sensor fiber. Simpler DAS systems have been successfully used in a range of publications [
4,
5,
7] and are also used in this work. Recent true-phase systems have shown significantly better signal-to-noise ratios as well as a long sensing range beyond 80 km [
6]. A common problem of both DAS and true-phase DAS systems is the large amount of raw data that is acquired and must be processed precisely and quickly enough to extract the features of interest from the noisy data. Due to the random arrangement of Rayleigh scattering centers in the fiber, there is significant variability in signal strength and even partial fading of the signal for certain ranges. There is also significant temporal drift in the DAS data even though novel setups can produce stable signals at the cost of sampling frequency and range [
13].
Significant filtering and data processing must be performed to extract the train position, velocity, and axle or bogie count from DAS data. A range of algorithms has been used in literature, such as high pass filtering, to remove slower signal drift; wavelet transforms to get cleaner train signals; or Canny and sliding variance edge detection to determine the leading and trailing edge of the train [
14,
15]. To successfully operate real-time monitoring systems in the future, the processing must be fast enough and capable of handling variable conditions of the signal, e.g., due to temperature fluctuations, changing permanent strain on the fiber, or interfering background traffic noise. Apart from conventional deterministic algorithms, a promising route to enable fast analysis of DAS signals are artificial neural networks (ANN). ANN have been applied for pattern recognition and classification of events such as pedestrians or construction work next to tracks [
16,
17] but can also speed up the processing of DAS raw data treatment [
18].
In this work, we present optimized conventional and artificial neural network algorithms and quantify the precision that can be achieved in train monitoring.
2. Methods
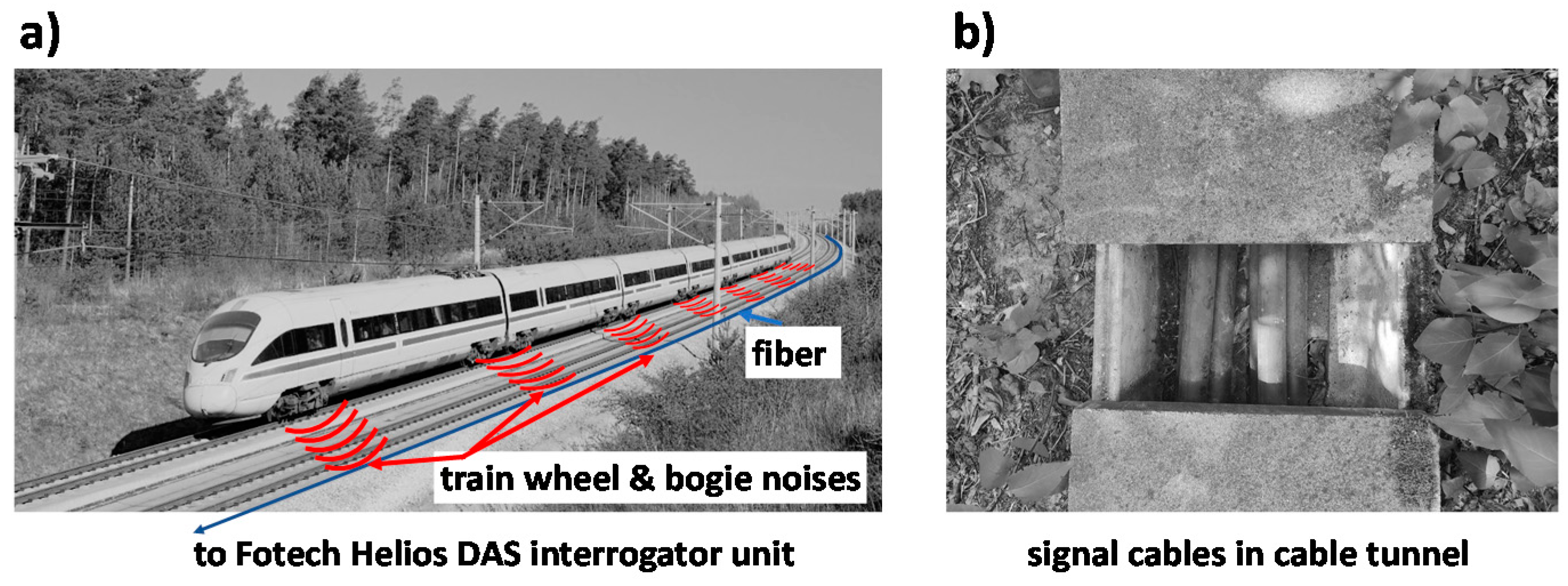
The measurements were performed on a 35 km stretch of the ICE fast train track (see
Figure 1a) between Erfurt and Halle (Verkehrsprojekt Deutsche Einheit Nr. 8.2 (VDE 8.2)). This railway line is newly built and therefore sensing conditions are homogeneous along this track. A standard telecommunication single-mode fiber lying in a trough next to the rail tracks (see
Figure 1b) was used as the sensor element. The DAS signals of such a fiber are not as strong as for fibers affixed to the rail directly [
19], but our sensing setup has the advantage that existing signal cables containing an unused optical fiber can be re-purposed for sensing at no additional cost or installation effort. The measurement stretch is a ballastless track leading to good acoustic coupling between rail and concrete slabs [
20]. However, the cable tunnel is not part of this concrete slab structure but lies decoupled from this within soil. There are stretches along the railway where the fiber optic cable is, for example, crossing beneath the tracks or has coils of extra fiber length in certain positions that affect the DAS sensing signal as discussed below.
We used the commercial Helios DAS system from Fotech Solutions in our experiment. We found a sample rate of 2.5 kHz with pulse widths of 100 ns and a sampling interval of 0.68 m per bin to provide an observable signal. To reduce noise in the data and to make the large datasets of ~10 GB per minute more manageable, we averaged 16 temporal samples for an effective sample time of 6.4 ms or a sampling rate of 156 Hz. After this averaging, typically the signal-to-noise ratio was above 10 over the first 20 km, except for certain faded fiber sections with a lower signal-to-noise ratio. We analyzed only the first 20 km of the 35 km stretch due to the stronger signal levels for shorter distances. However, with different smoothing and thresholding settings, the farther distances can also be analyzed, albeit with increased analysis error.
4. Discussion
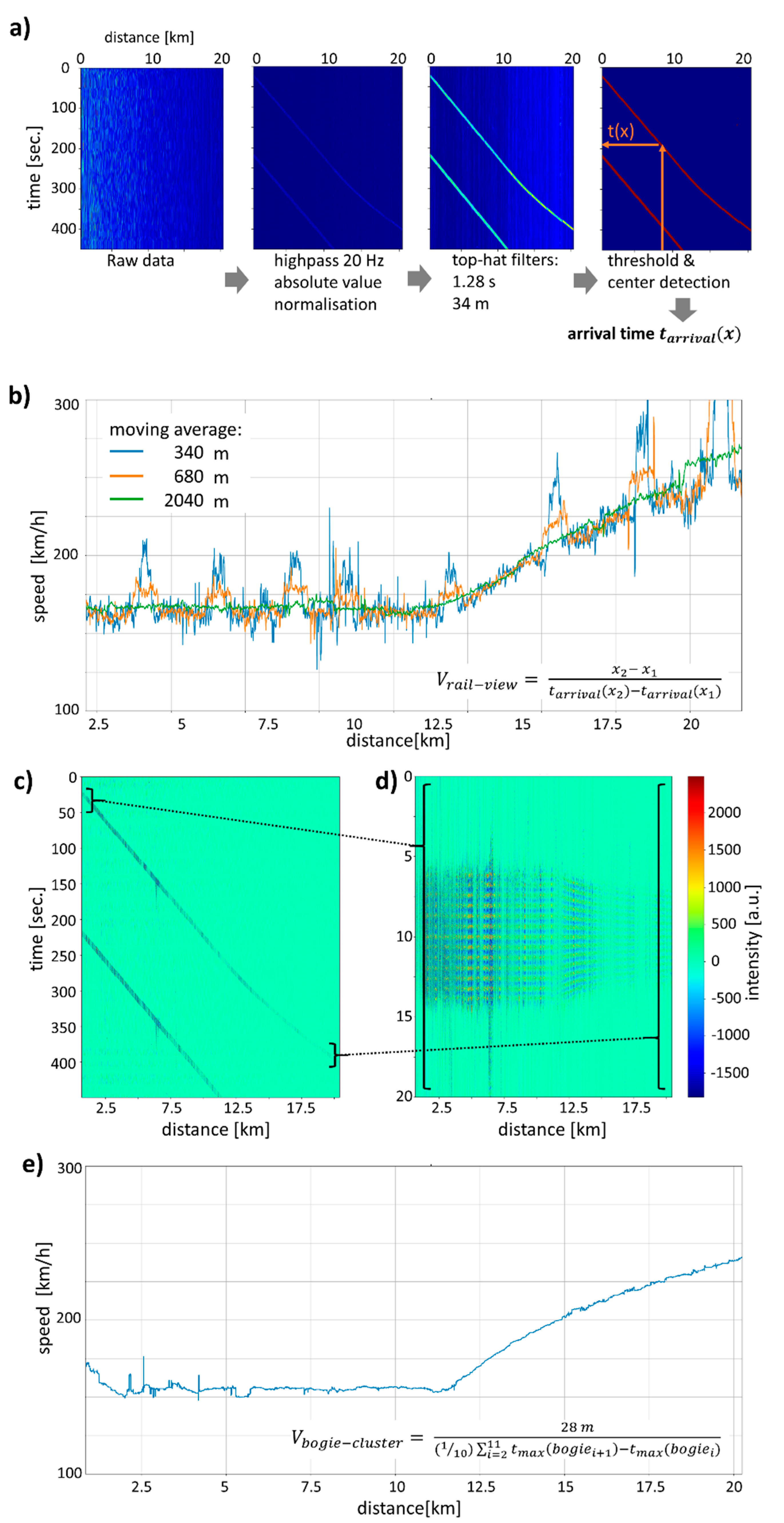
In the above examples, we have demonstrated how a commercial DAS instrument can be used to detect the positions of the whole train as well as bogie clusters. From these results, the train velocity can be determined in three distinct ways using train-view, rail-view, and bogie cluster data analysis (
Figure 2b and
Figure 3b,e). In
Table 1, we summarize the standard deviation in the velocity determination for our case study. The results show that the bogie cluster velocity has the lowest standard deviation followed by rail-view and lastly train-view velocities. The slight improvement for rail-view in comparison with train-view can be explained by the position-dependent fading, which introduces fluctuations in signal strength and affects the train localization in the spatial direction. For the rail-view analysis at a fixed position of the fiber, fading effects are mostly constant and do not affect the train localization in the time direction. The bogie cluster velocity, which uses the sub-structure in the train noises, improves on the train-view or rail-view velocity precision by more than a factor of four and, in contrast to the other velocities, is not affected by spurious jumps in velocity due to extra fiber length or details of the fiber-track distance and geometry. Note that the erroneous velocity jumps have been removed for the calculation of the standard deviation from train- and rail-view. But, even with these corrections to train-view and rail-view, the bogie cluster velocity is more precise. In the future, also combinations of the three analysis methods are possible for more reliable determination of the velocity.
The standard deviations given in
Table 1 have been determined for a train moving at 160 km/h and depend on the train velocity. According to error propagation, the standard deviation of the velocity is
and therefore increases linearly with velocity if the position or time errors remain constant. This naïve linear relation will not be strictly fulfilled as the errors in the DAS position/time determination will increase at low velocities where the train generates lower noises and therefore lower DAS signal. At elevated train speeds, we find an increase in the velocity error that is roughly proportional to the velocity. For example, we observe for rail-view velocities a standard deviation of ±4.8 km/h at 160 km/h and 7.2 km/h at 250 km/h (data not shown, both averaged for 340 m).
It is important to note that all the standard deviations given have been averaged either in time or in space. In time, 7.5 s corresponds to the time it takes a train to pass a certain position at 160 km/h. In space, the train length over all the bogies is 340 m so that 7.5 s or 340 m averaging is comparable. While all velocity measurements can be updated in 6.8 ms intervals, this velocity update does not correspond to the real-time velocity but a previous train velocity, and different analysis and averaging schemes have different delays. In train-view, the velocity calculated for example with 15 s moving average corresponds to the train velocity 15 s prior in the center of the averaging window. In rail-view or bogie cluster velocities, the spatial averaging similarly introduces a delay in the velocity determination. For example, 680 m averaging introduces a 15 s delay at 160 km/h. Importantly, another 7.5 s must be added to this value because, at each position, one must wait for the train to pass for a total delay of 22.5 s. Therefore, both rail-view and bogie cluster velocity have larger delays. Their minimum delay is limited by the train passage time and depends on the train speed. In conclusion, train-view has an advantage for fast real-time monitoring down to a theoretical limit of 6.4 ms but accepting some delay in rail-view and bogie cluster velocities are useful and more precise.
The data analysis, filtering, and neural network techniques are a field of active development with a range of algorithms such as edge detection by sliding variance, principal component analysis of the train frequency spectrum, or wavelet transformation and are discussed in the literature [
11,
14]. In real-time monitoring, the computer processing time of the big datasets is a concern so that time-optimized algorithms have been presented, e.g., in reference [
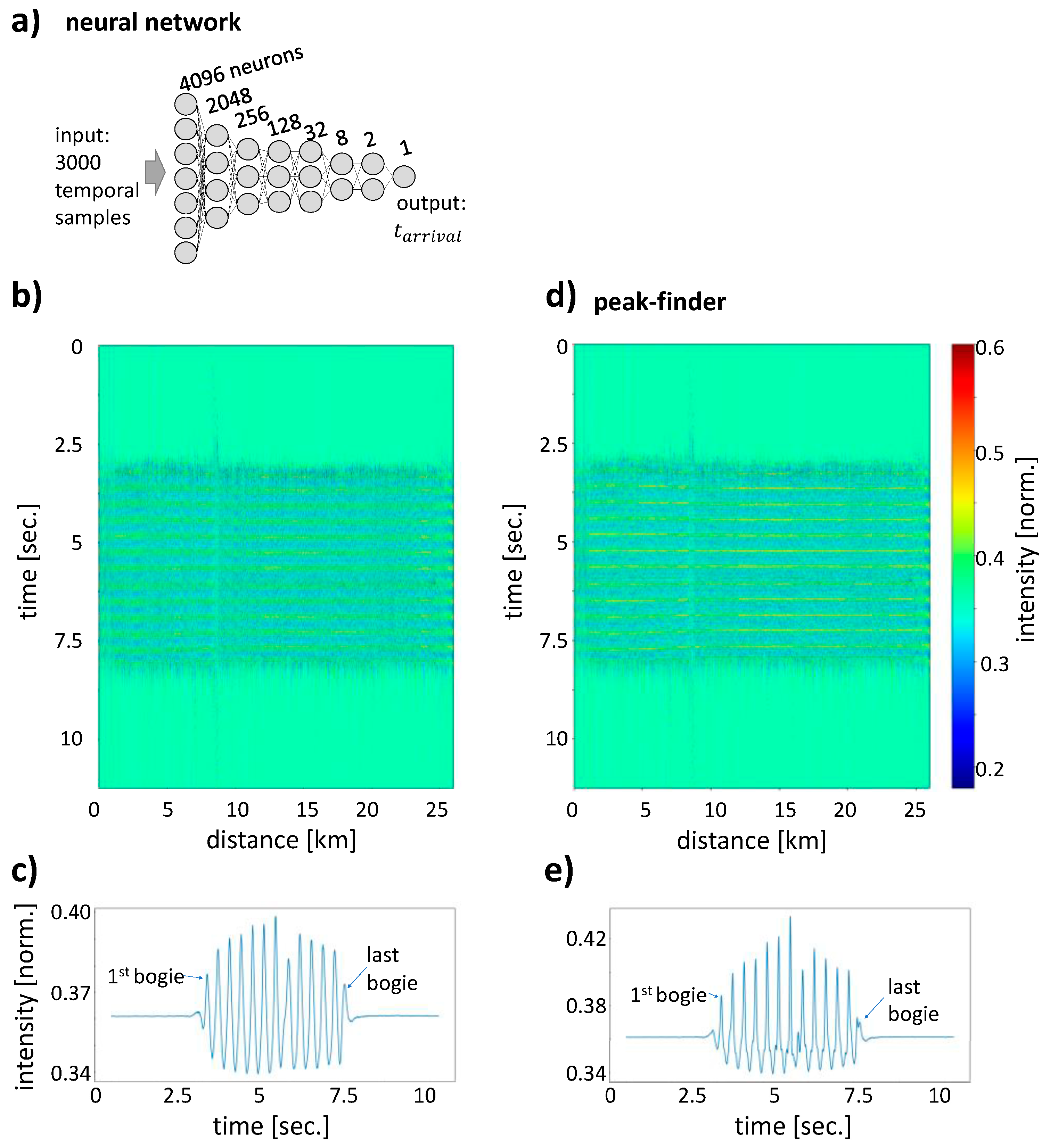
15], where wavelet analysis has been replaced by faster smoothing and Canny edge detection filters. ANN processing time is promising in this regard. The ANN is currently only used to locate the train in a short 12 s time interval pre-determined by using a conventional filter algorithm, but the slow pre-processing can potentially be integrated in a much faster ANN data analysis. In conclusion, further optimization of the speed and quality of the raw data processing remains an important task, both for DAS and true-phase DAS systems.
Newer generations of DAS systems, in particular true-phase coherent optical time-domain reflectivity (COTDR) systems, as well as true-phase and low drift wavelength scanning COTDR systems, yield better data quality compared to the one used in this study. Therefore, we expect that the precision demonstrated above can be achieved with less averaging and therefore shorter update intervals and higher spatial resolution even at the meter level for axle counting. A higher signal-to-noise ratio of the data will make it possible to measure at larger distances from the interrogator unit. The bogie cluster velocity will profit from the higher data quality that enables one to resolve each axle and not just bogie clusters as shown here. However, the above observations of analysis strategies using train-view and rail-view representations as well as the possibilities of ANNs for axle/bogie cluster detection with the associated velocity determination remain valid and important also for these better data qualities.
5. Conclusions
We have demonstrated that distributed fiber optic sensing with standard telecom fibers can determine current position, velocity, and bogie cluster count during the movement of ICE 4 trains of DB AG. We have shown that a first train-view analysis method is suited for the determination of train position and velocity. A second, slightly slower rail-view analysis is less susceptible to fluctuations of the fiber scattering and results in lower velocity uncertainty. Importantly, this rail-view analysis together with peak finder or artificial neural network algorithms makes it possible to resolve individual bogies or bogie clusters in the signal so that the train cars can be counted and train integrity can be monitored. From the bogie signal and the time between the bogie passage, a velocity can be calculated with an uncertainty of down to ±0.8 km/h depending on averaging length and time. Our work further demonstrates that training artificial neural networks with past train data can be used to analyze future train movements and is more than ten times faster and can handle more varied input better than our conventional algorithm. In the future, work is needed to investigate the velocity uncertainties of slower-moving trains on older rail infrastructure. While initial tests validate the analysis approach, the data quality is significantly lower and true-phase DAS systems may be required to achieve higher signal-to-noise ratios in the data. In conclusion, this quantitative study opens ways for train monitoring as well as more intricate analysis for example of train or rail defects via DAS.

 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}