Abnormal Road Surface Recognition Based on Smartphone Acceleration Sensor




Abstract
:1. Introduction
2. Road Information Sharing System
3. Data Processing
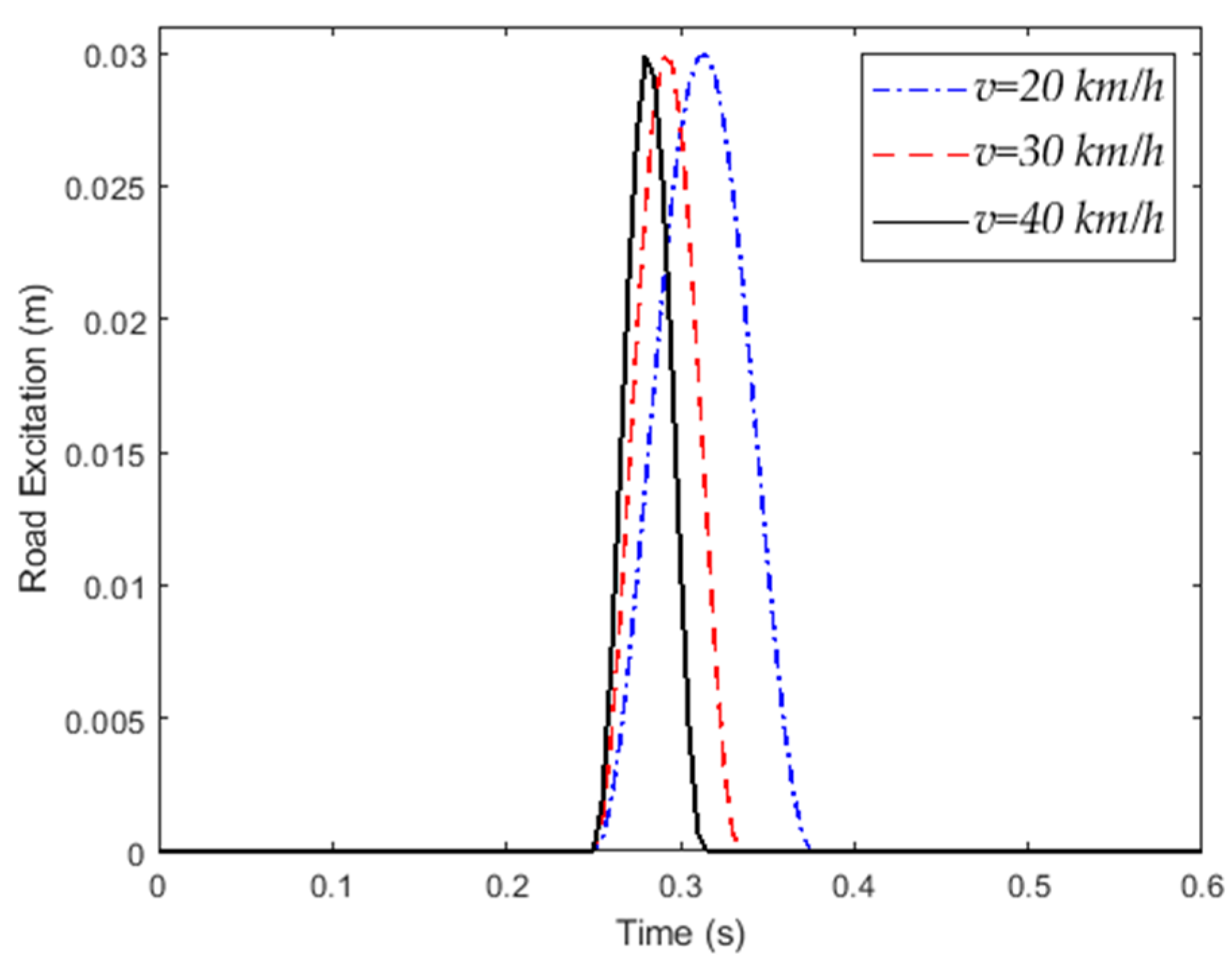
3.1. Vehicle Dynamics Analysis
3.2. Butterworth Filter
4. Abnormal Road Surface Recognition
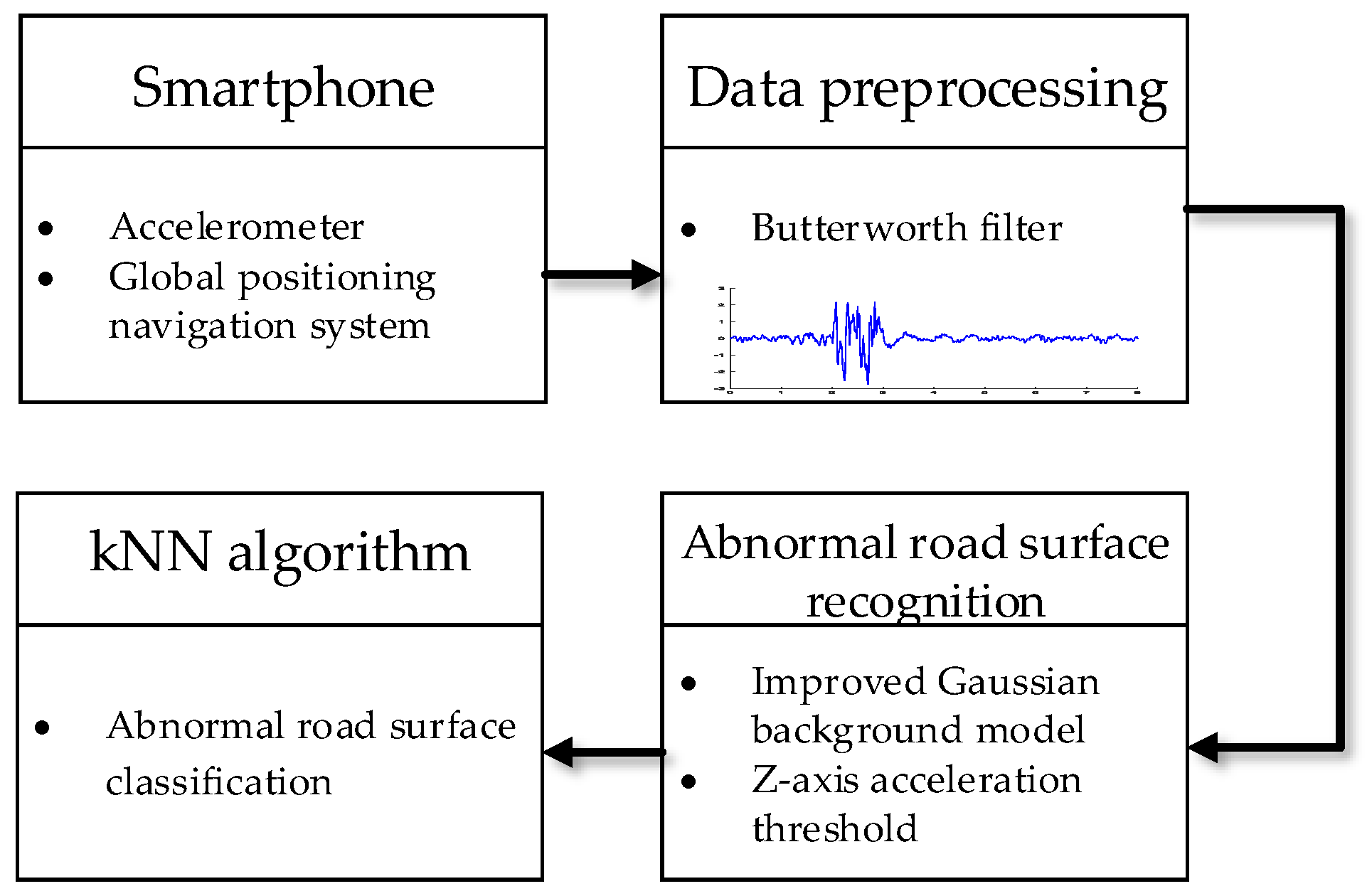
4.1. Overview of Abnormal Road Surface Recognition Algorithm
4.2. Gaussian Background Model
4.3. Improved Gaussian Background Model
| Algorithm 1: Abnormal road surface recognition method |
| Input: z, the Z-axis acceleration; v, the vehicle speed; KS, the spring stiffness; CS, the damping coefficient. Output: event_z, Acceleration due to abnormal road surface. 1. Algorithm begin: 2. μ = 0 % μ is a mathematical expectation 3. σ = 0 % σ is a standard deviation 4. TG = 2 % TG is the Gaussian matching threshold 5. TV = 20 % TV is the speed threshold 6. if (v > TV) 7. z_match ←abs(z − μ)/σ 8. % calculating thresholds TZ using fuzzy logic inference machines 9. TZ ← fuzzy_control (KS, CS) 10. if (z_match > TG*v/TV) && (abs(z) > (TZ * v/TV)) 11. event_z ← z 12. else % update μ and σ, as described in Equation (5) 13. μ ← (1 − α) * μ + α*z 14. σ ← SQRT ((1 − α) * σ^2 + α * (z − μ)^2) % SQRT means calculate square root 15. end if 16. end if 17. return event_z 18. Algorithm end |
5. kNN Algorithm Abnormal Road Surface Classification
5.1. Training and Testing Sample Data Sets
5.2. Classification Algorithms and Tuning Parameters
6. Test and Analysis
6.1. Test Conditions
6.2. Vehicle Dynamic Response under Different Road Excitations
6.3. Test Results and Analysis
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sha, A.M.; Tong, Z.; Gao, J. Recognition and Measurement of Road Surface Disasters Based on Convolutional Neural Networks. Chin. J. Highway Transp. 2018, 31, 1–10. [Google Scholar]
- Mohan, P.; Padmanabhan, V.N.; Ramjee, R. Nericell: Rich monitoring of road and traffic conditions using mobile smartphones. In Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems, Raleigh, NC, USA, 5–7 November 2008; pp. 323–336. [Google Scholar]
- Wahlström, J.; Skog, I.; Händel, P. Smartphone-based vehicle telematics: A ten-year anniversary. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2802–2825. [Google Scholar] [CrossRef] [Green Version]
- Quintana, M.; Torres, J.; Menendez, J.M. A Simplified Computer Vision System for Road Surface Inspection and Maintenance. IEEE Trans. Intell. Transp. Syst. 2015, 17, 608–619. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Burrow, M.; Li, Z. Automatic Road Condition Assessment by Using Point Laser Sensor. In Proceedings of the 2018 IEEE SENSORS, Montreal, QC, Canada, 28–31 October 2018; pp. 1–4. [Google Scholar]
- Aki, M.; Rojanaarpa, T.; Nalano, K. Road Surface Recognition Using Laser Radar for Automatic Platooning. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2800–2810. [Google Scholar] [CrossRef]
- De, Z.K.; Keppitiyagama, C.; Seneviratne, G.P. A Public Transport System Based Sensor Network for Road Surface Condition Monitoring. In Proceedings of the 2007 Workshop on Networked Systems for Developing Regions, Kyoto, Japan, 2 August 2007; p. 9. [Google Scholar]
- Chen, K.; Lu, M.; Tan, G. CRSM: Crowdsourcing Based Road Surface Monitoring. In Proceedings of the 2013 IEEE 10th International Conference on High Performance Computing and Communications & 2013 IEEE International Conference on Embedded and Ubiquitous Computing, Zhangjiajie, China, 13–15 November 2013; pp. 2151–2158. [Google Scholar]
- Harikrishnan, P.M.; Gopi, V.P. Vehicle Vibration Signal Processing for Road Surface Monitoring. IEEE Sens. J. 2017, 17, 5192–5197. [Google Scholar] [CrossRef]
- Wang, S.F.; Du, K.Y.; Meng, Y. Machine Learning-Based Road Terrain Recognition for Land Vehicles. Acta Armamentarii 2017, 38, 1642–1648. [Google Scholar]
- Celaya, P.J.; Galvan, T.C.; Lopez, M.F. Speed Bump Detection Using Accelerometric Features: A Genetic Algorithm Approach. Sensors 2018, 18, 443. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.H.; Zhang, Y.T. Research of Intelligent Patrol of Road Surface Abnormality under the Background of Intelligent Transportation—From Perspective of Crowd-sourcing and DTW Technology. Sci. Technol. Prog. Policy 2018, 35, 93–97. [Google Scholar]
- Cong, J.L.; Wang, Y.; Yang, C.P. Data Preprocessing Method of Vehicle Vibration Acceleration by Smartphone. J. Data Acquis. Process. 2019, 34, 349–357. [Google Scholar]
- Yi, C.W.; Chuang, Y.T.; Nian, C.S. Toward Crowdsourcing-Based Road Pavement Monitoring by Mobile Sensing Technologies. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1905–1917. [Google Scholar] [CrossRef]
- Mukherjee, A.; Majhi, S. Characterisation of Road Bumps Using Smartphones. Eur. Transp. Res. Rev. 2016, 8, 13. [Google Scholar] [CrossRef] [Green Version]
- Zhao, K.; Dong, M.M.; Zhao, F. Study on Terrain Classification Based on Vehicle Suspension Vibration. Trans. Beijing Inst. Technol. 2018, 38, 155–159. [Google Scholar]
- Gao, K.; Han, F.; Dong, P.; Xiong, N.; Du, R. Connected Vehicle as a Mobile Sensor for Real Time Queue Length at Signalized Intersections. Sensors 2019, 19, 2059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, W.; Xu, H.; Li, H.; Yang, Y.; Sharma, P.; Wang, J.; Singh, S. Complexity and Algorithms for Superposed Data Uploading Problem in Networks with Smart Devices. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef]
- Hu, L.; Zhong, Y.; Hao, W. Optimal Route Algorithm Considering Traffic Light and Energy Consumption. IEEE Access 2018, 6, 59695–59704. [Google Scholar] [CrossRef]
- Hao, W.; Lin, Y.; Cheng, Y. Signal Progression Model for Long Arterial: Intersection Grouping and Coordination. IEEE Access 2018, 6, 30128–30136. [Google Scholar] [CrossRef]
- Wu, W.; Huang, L.; Du, R. Simultaneous Optimization of Vehicle Arrival Time and Signal Timings within a Connected Vehicle Environment. Sensors 2020, 20, 191. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Q.; Gu, W.; Zhang, X. Analyzing freeway crash severity using a Bayesian spatial generalized ordered logit model with conditional autoregressive priors. Accid. Anal. Prev. 2019, 127, 87–95. [Google Scholar] [CrossRef]
- Hao, W.; Daniel, J. Motor vehicle driver injury severity study under various traffic control at highway-rail grade crossings in the United States. J. Saf. Res. 2014, 51, 41–48. [Google Scholar] [CrossRef]
- Hao, W.; Kamga, C.; Yang, X. Driver injury severity study for truck involved accidents at highway-rail grade crossings in the United States. Transp. Res. Part F Traffic Psychol. Behav. 2016, 43, 379–386. [Google Scholar] [CrossRef]
- Salau, I.B.; Onumanyi, A.J.; Onwuka, E.N. A Survey of Accelerometer Based Techniques for Road Anomalies Detection and Characterization. Int. J. Eng. Sci. Appl. 2019, 3, 8–20. [Google Scholar]
- Hu, L.; Hu, X.; Wan, J. The injury epidemiology of adult riders in vehicle-two-wheeler crashes in China, Ningbo, 2011–2015. J. Saf. Res. 2019. [Google Scholar] [CrossRef]
- Tan, R.H.; Chen, Y.; Lu, Y.X. The Mathematical Models in Time Domain for the Road Disturbances and the Simulation. China J. High Way Transp. 1998, 11, 98–104. [Google Scholar]
- Rishiwal, V.; Khan, H. Automatic Pothole and Speed Breaker Detection Using Android System. In Proceedings of the 2016 39th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 30 May–3 June 2016; pp. 1270–1273. [Google Scholar]
- Thanh, P.N.; Kappas, M. Comparison of Random Forest, k-Nearest Neighbor, and Support Vector Machine Classifiers for Land Cover Classification Using Sentinel-2 Imagery. Sensors 2018, 18, 18. [Google Scholar] [CrossRef] [PubMed] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KS | NB | NS | ZO | PS | PB | |
|---|---|---|---|---|---|---|
| CS | ||||||
| NB | ZO | NB | NB | NB | NB | |
| NS | NB | PB | NB | NB | NB | |
| PS | ZO | NB | NB | ZO | NB | |
| PB | ZO | NB | ZO | ZO | ZO | |
| Road Surface | Training | Testing |
|---|---|---|
| Bump | 118 | 151 |
| Flat | 174 | 283 |
| Pothole | 103 | 68 |
| Road Surface | Field Measurement | Algorithm Identification | Accuracy Rate |
|---|---|---|---|
| Pothole | 151 | 145 | 96.03% |
| Bump | 68 | 64 | 94.12% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, R.; Qiu, G.; Gao, K.; Hu, L.; Liu, L. Abnormal Road Surface Recognition Based on Smartphone Acceleration Sensor. Sensors 2020, 20, 451. https://doi.org/10.3390/s20020451
Du R, Qiu G, Gao K, Hu L, Liu L. Abnormal Road Surface Recognition Based on Smartphone Acceleration Sensor. Sensors. 2020; 20(2):451. https://doi.org/10.3390/s20020451
Chicago/Turabian StyleDu, Ronghua, Gang Qiu, Kai Gao, Lin Hu, and Li Liu. 2020. "Abnormal Road Surface Recognition Based on Smartphone Acceleration Sensor" Sensors 20, no. 2: 451. https://doi.org/10.3390/s20020451
APA StyleDu, R., Qiu, G., Gao, K., Hu, L., & Liu, L. (2020). Abnormal Road Surface Recognition Based on Smartphone Acceleration Sensor. Sensors, 20(2), 451. https://doi.org/10.3390/s20020451