An Improved Calibration Technique for MEMS Accelerometer-Based Inclinometers


Abstract
:1. Introduction
2. Single-Parameter Calibration Technique
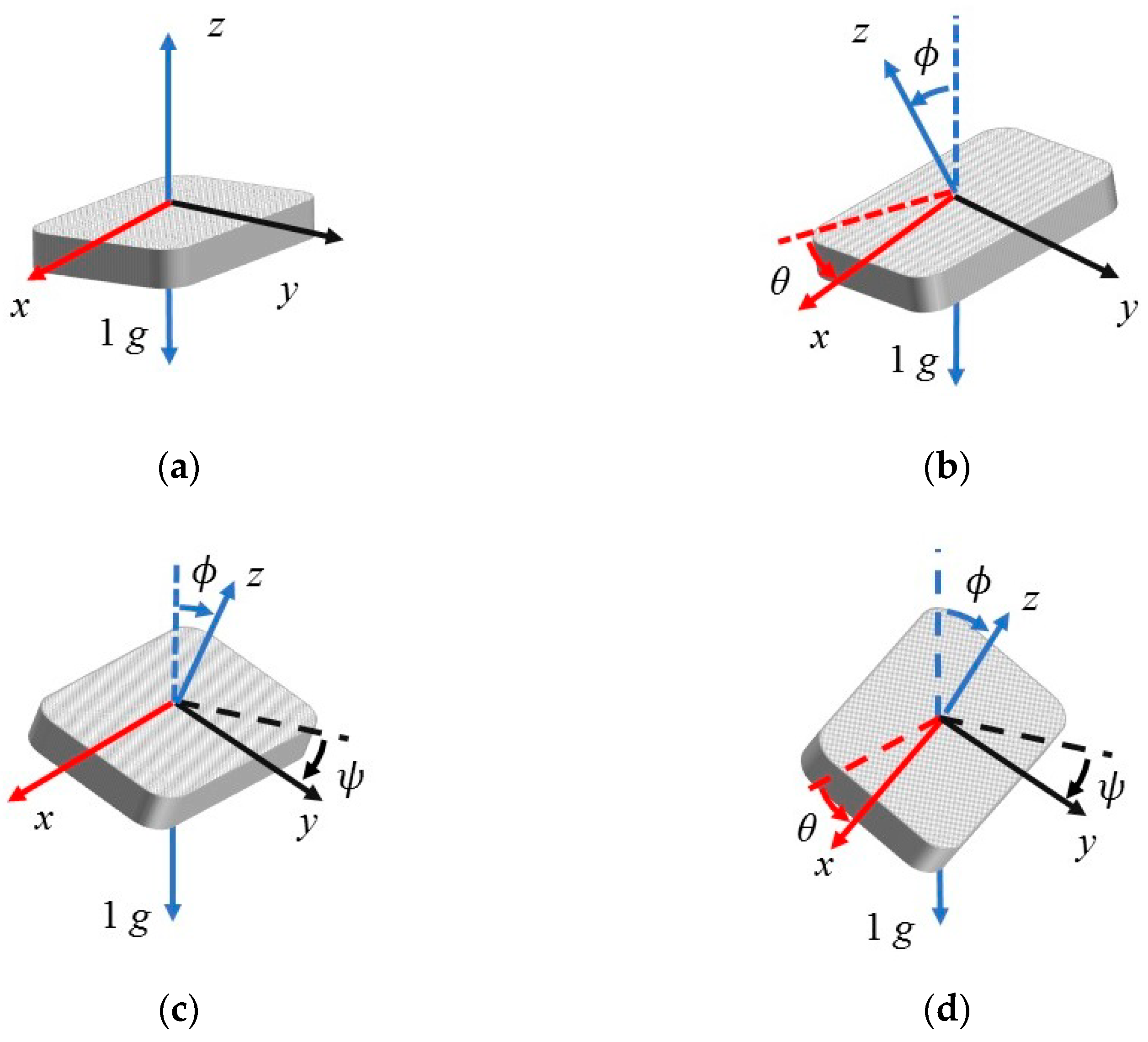
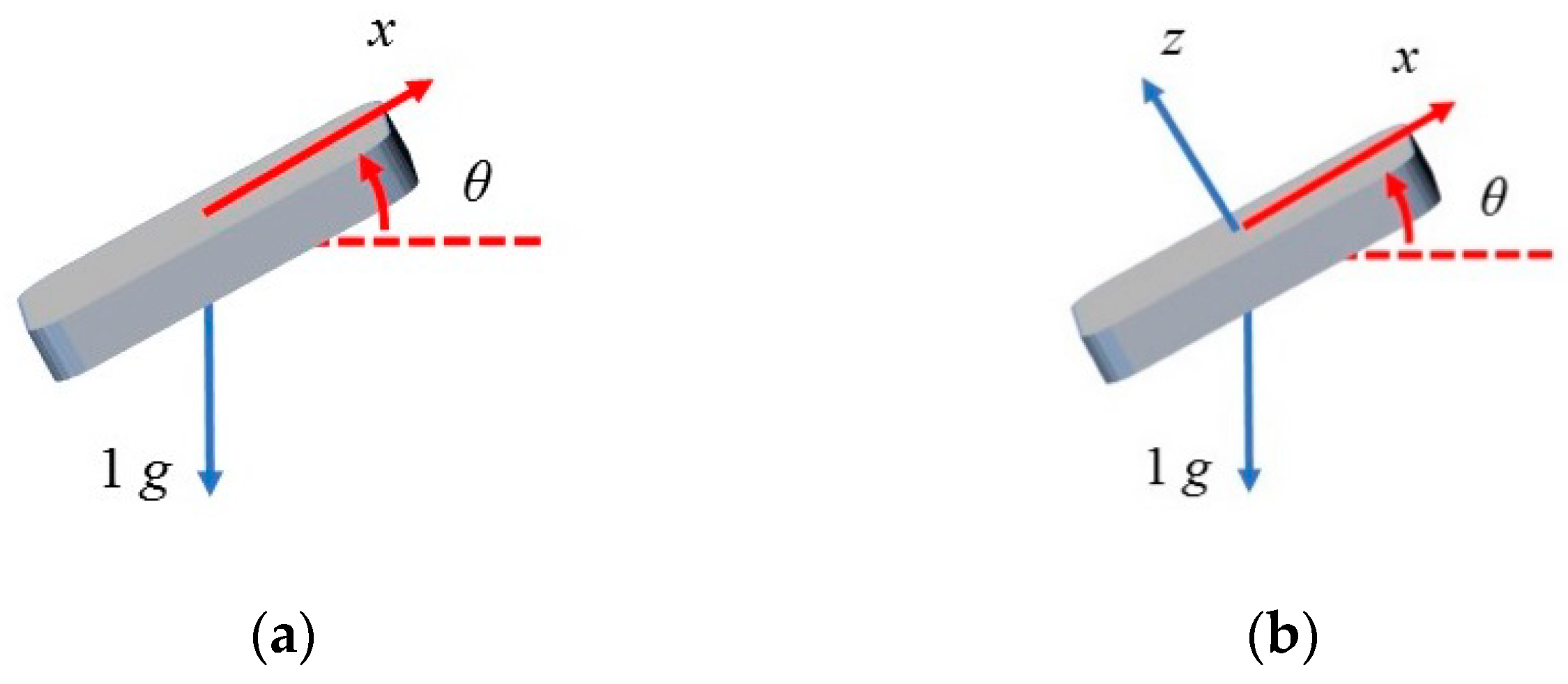
2.1. Angle Sensing Principles
2.2. Single-Parameter Mathematical Model
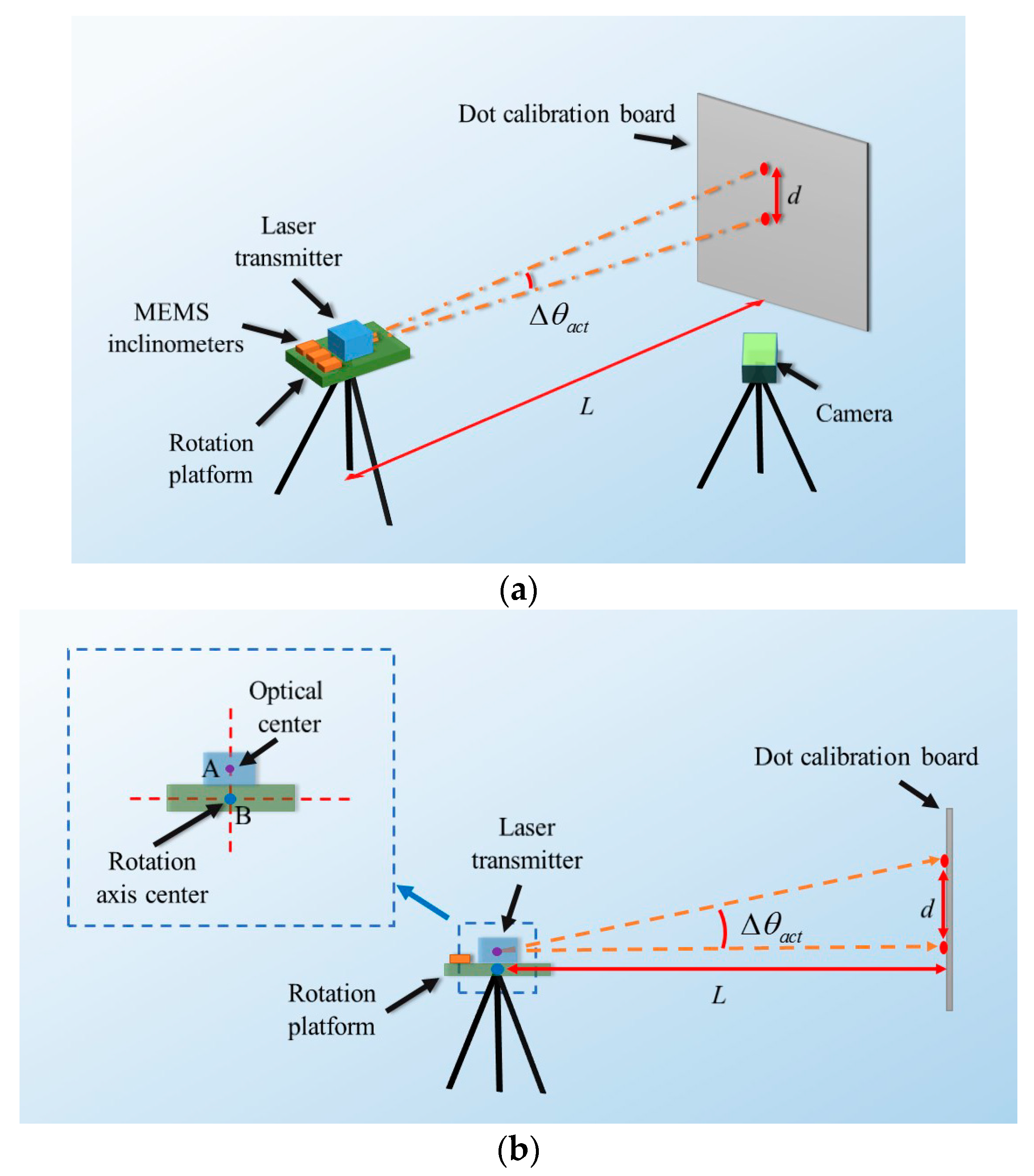
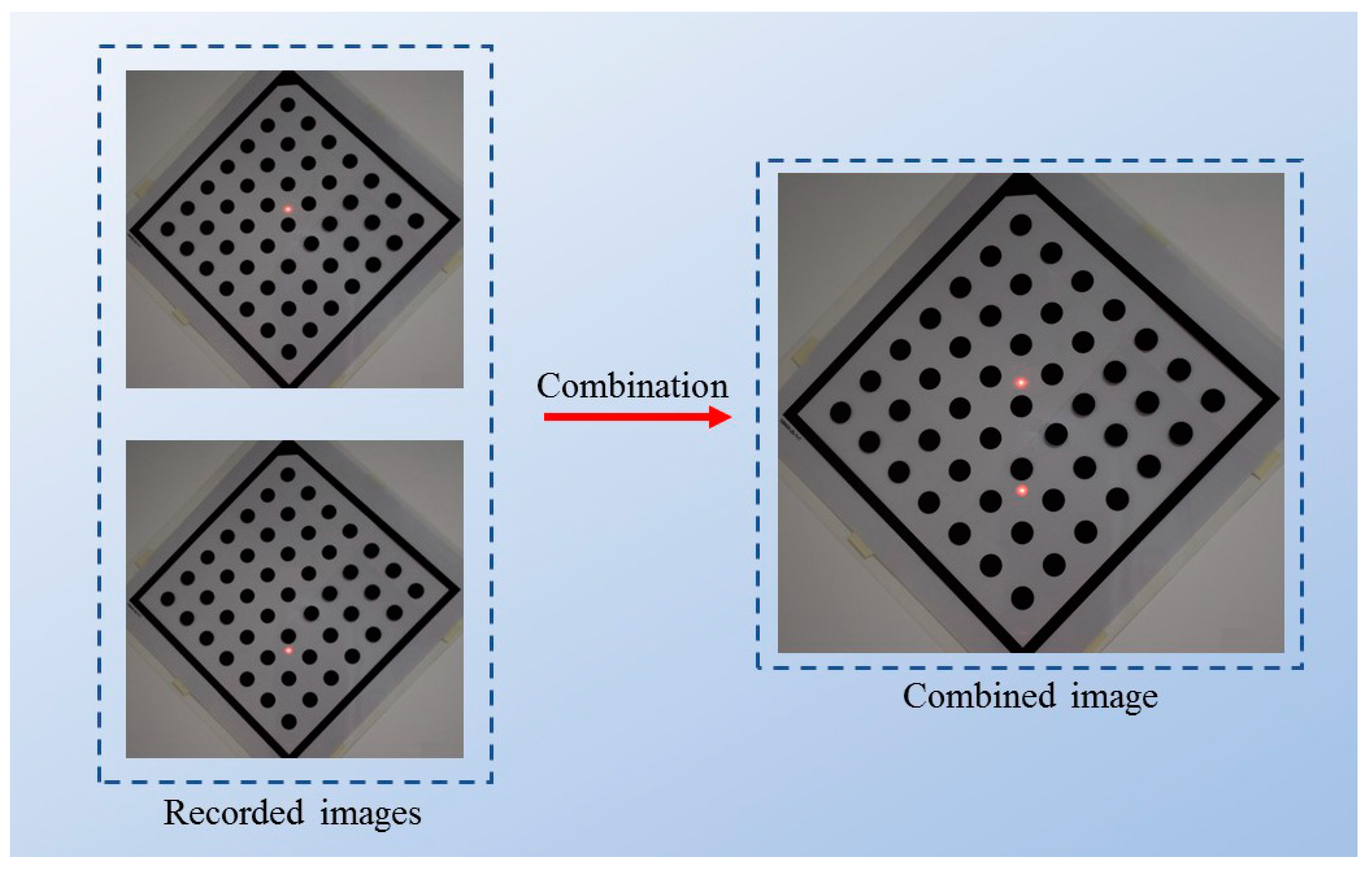
2.3. Method for Obtaining the Key Parameter
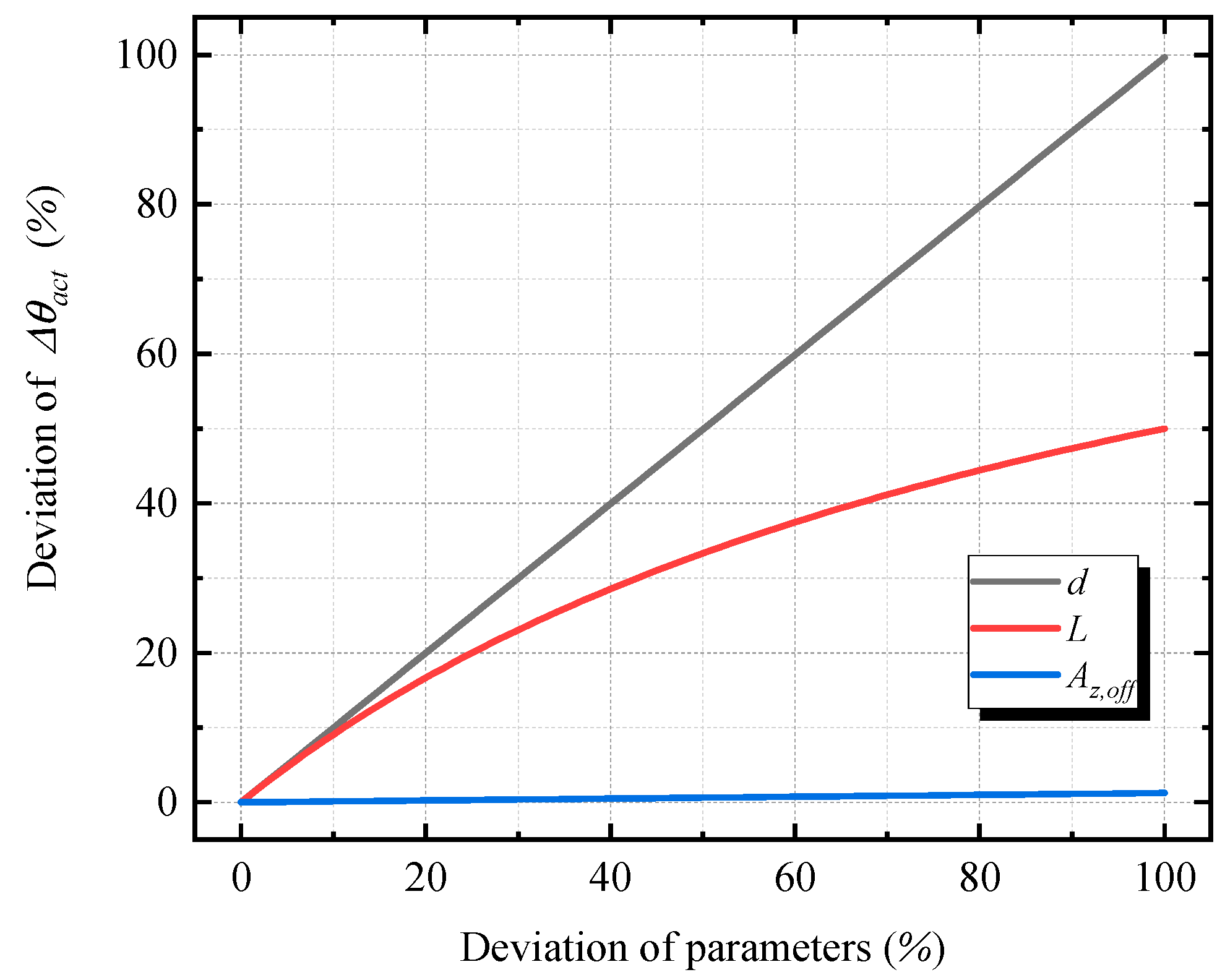
2.4. Measurement Uncertainty
3. Experimental Validation
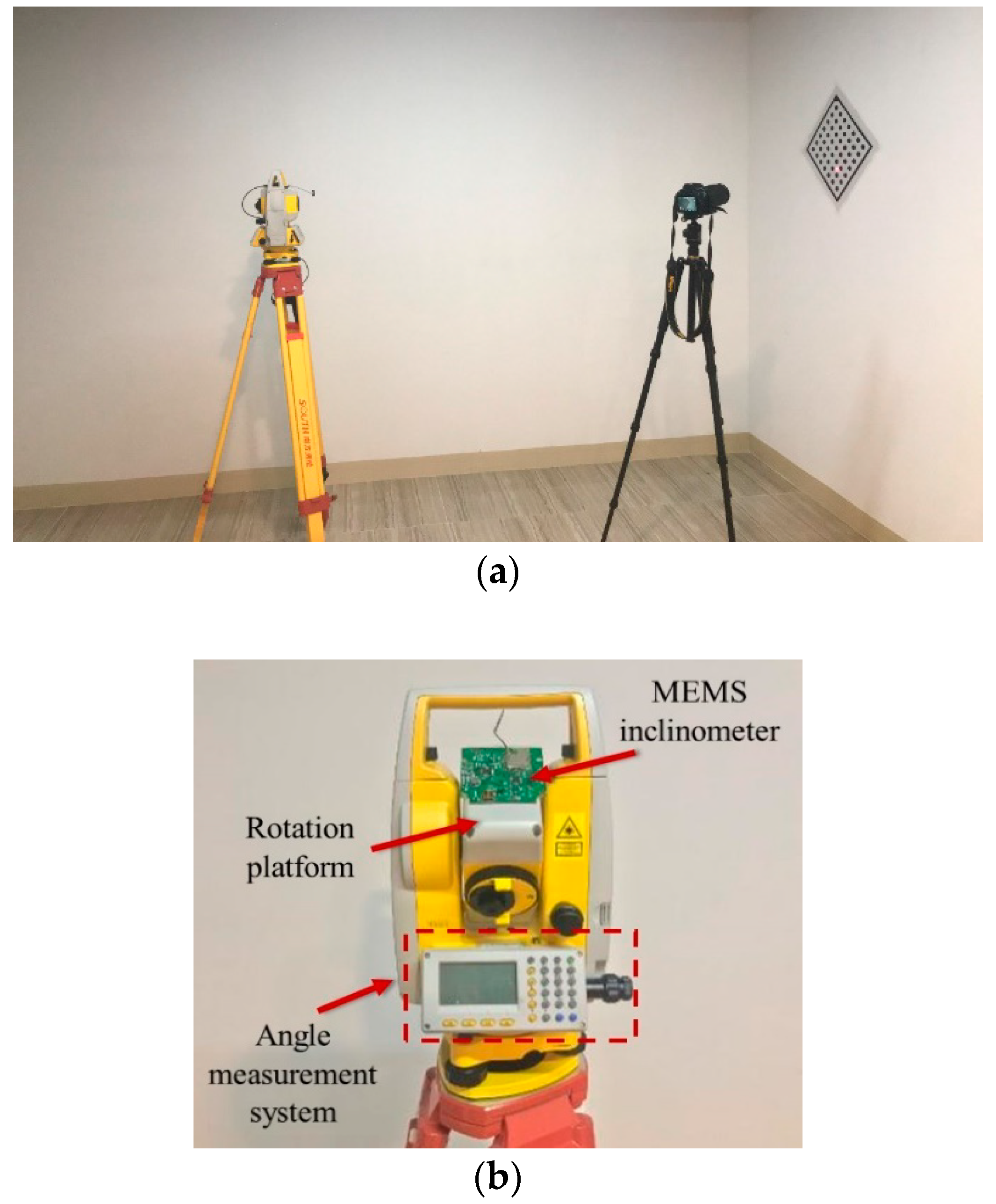
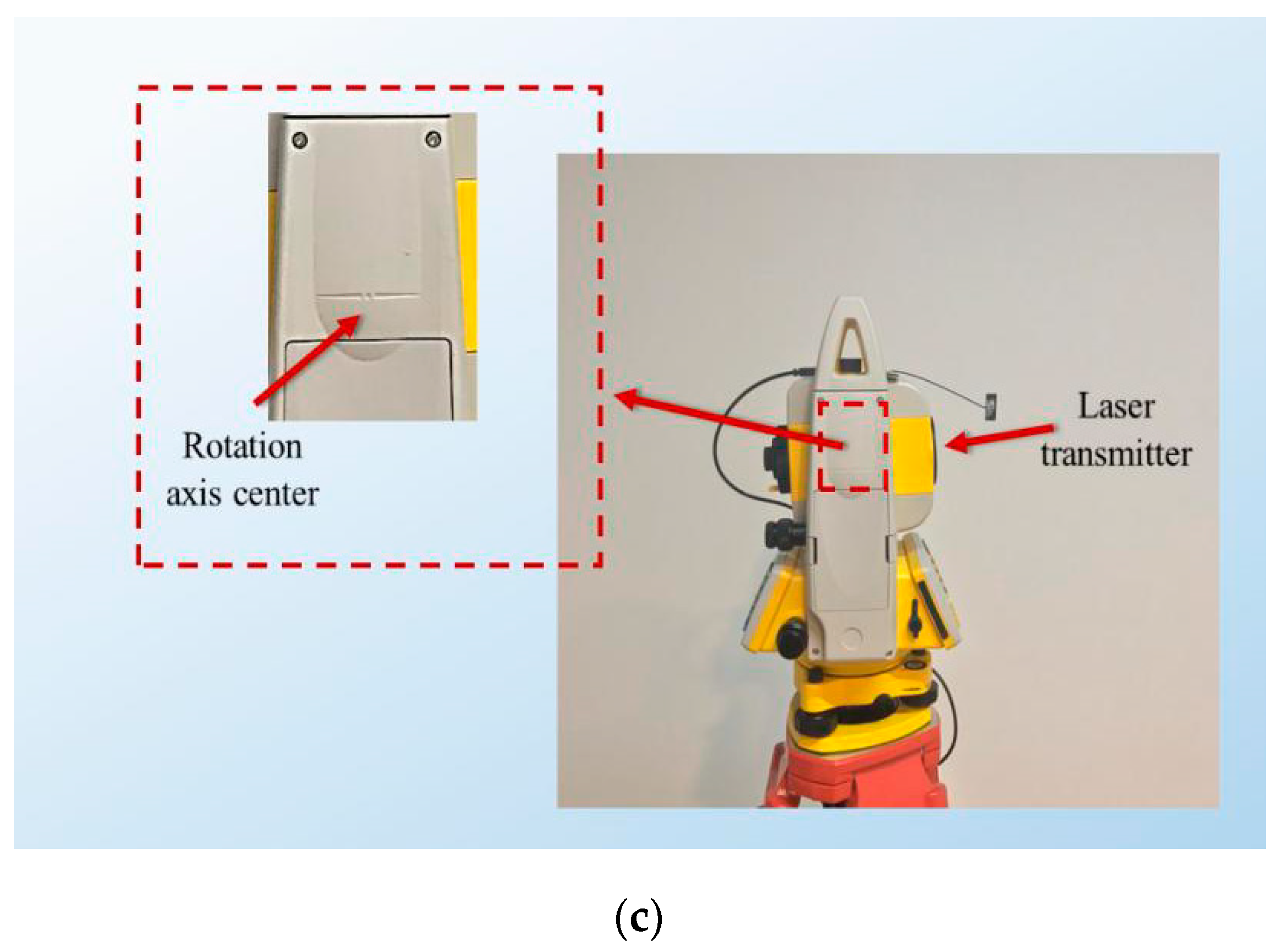
3.1. Experimental Setup
3.2. Results and Discussion
3.2.1. Angle Calibration Experiment
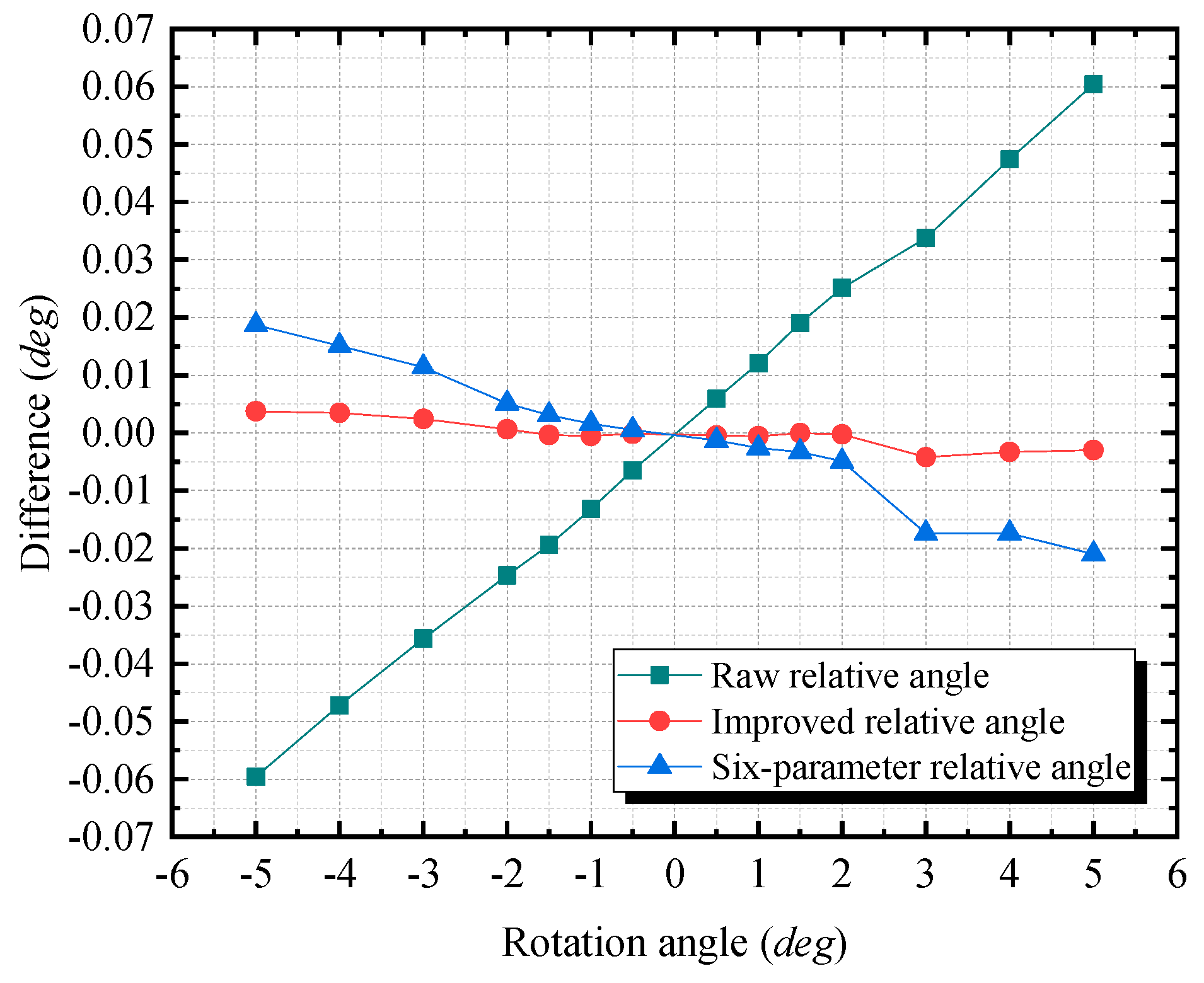
3.2.2. Comparison Experiment
4. Application
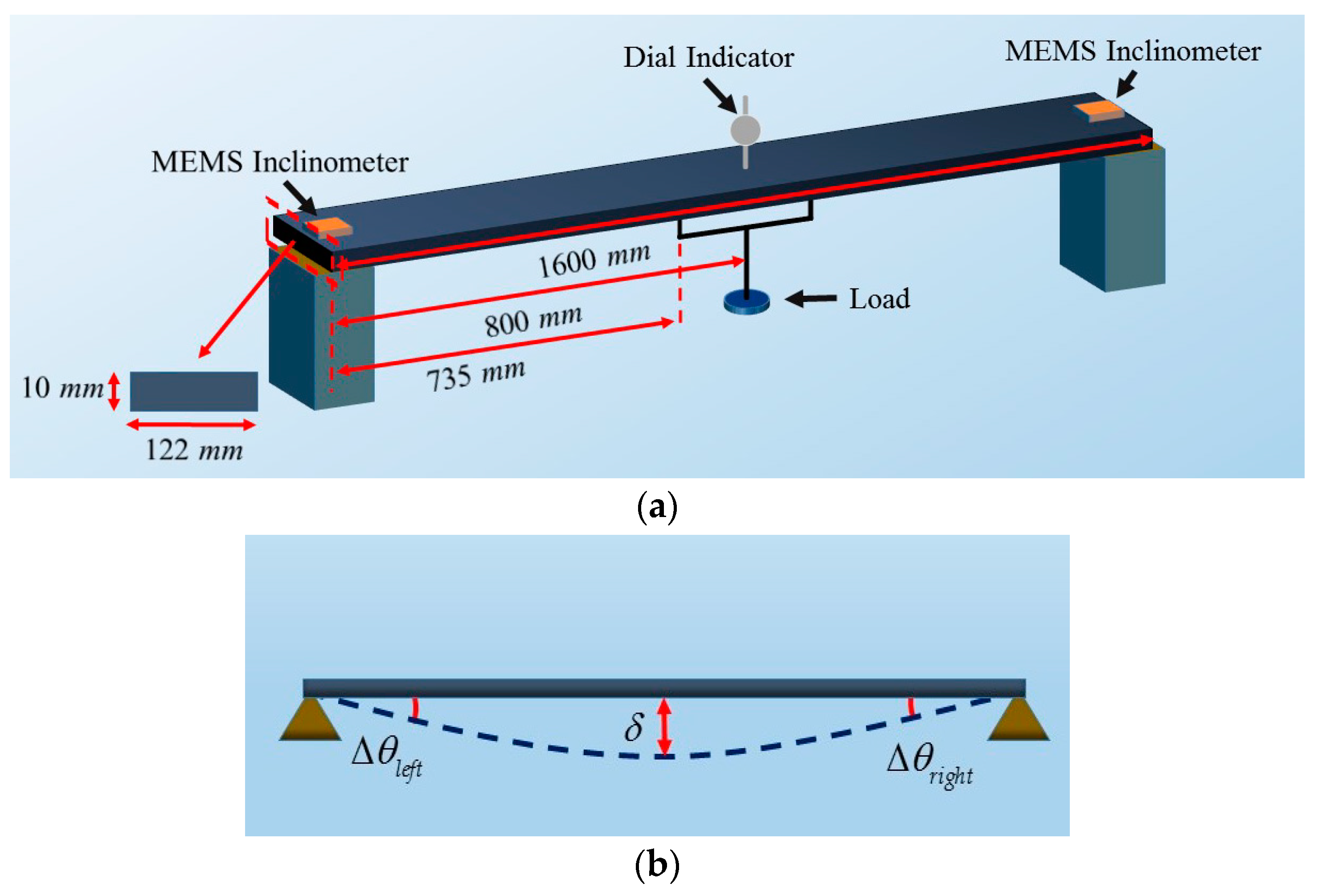
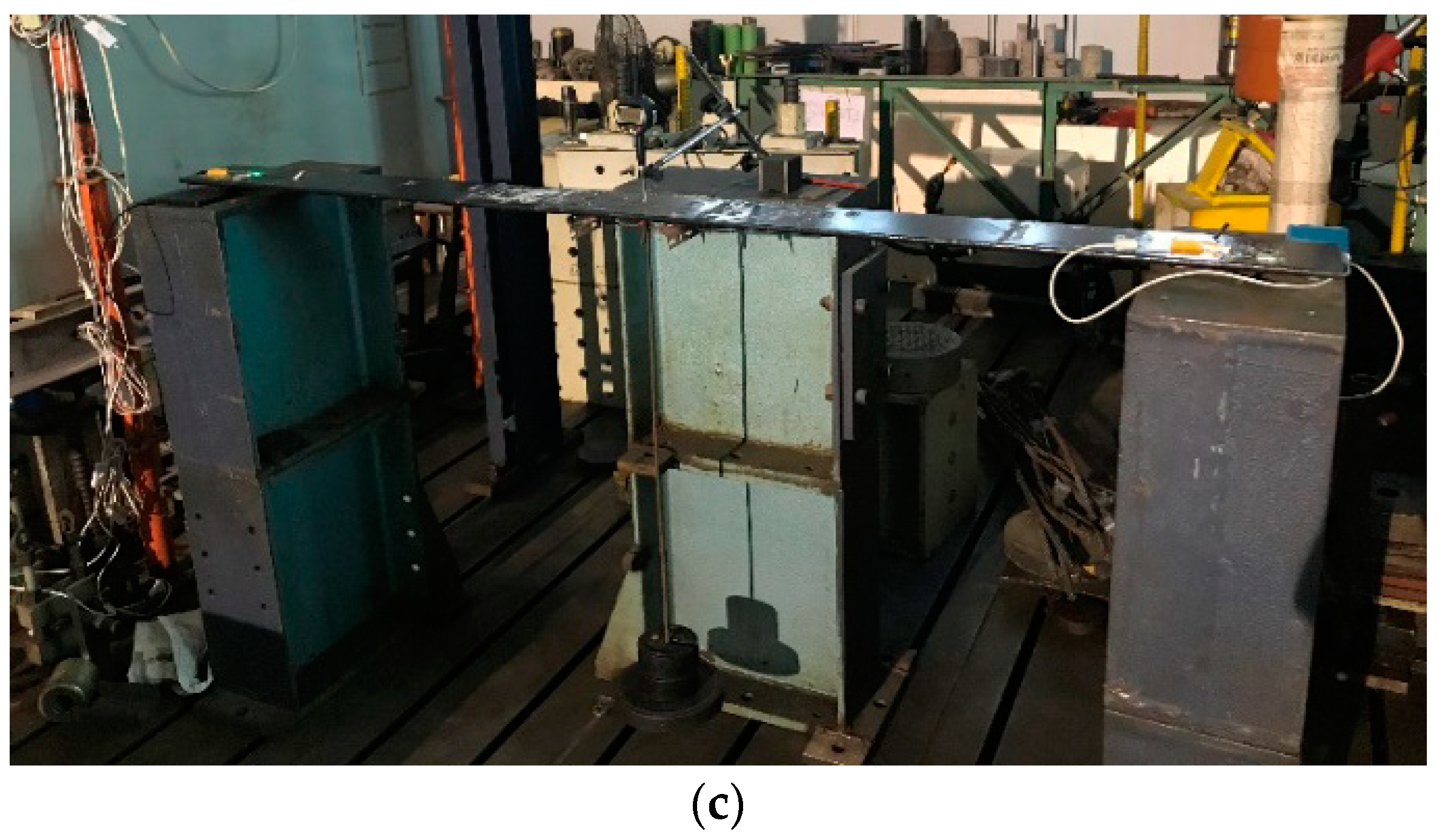
4.1. Experimental Setup
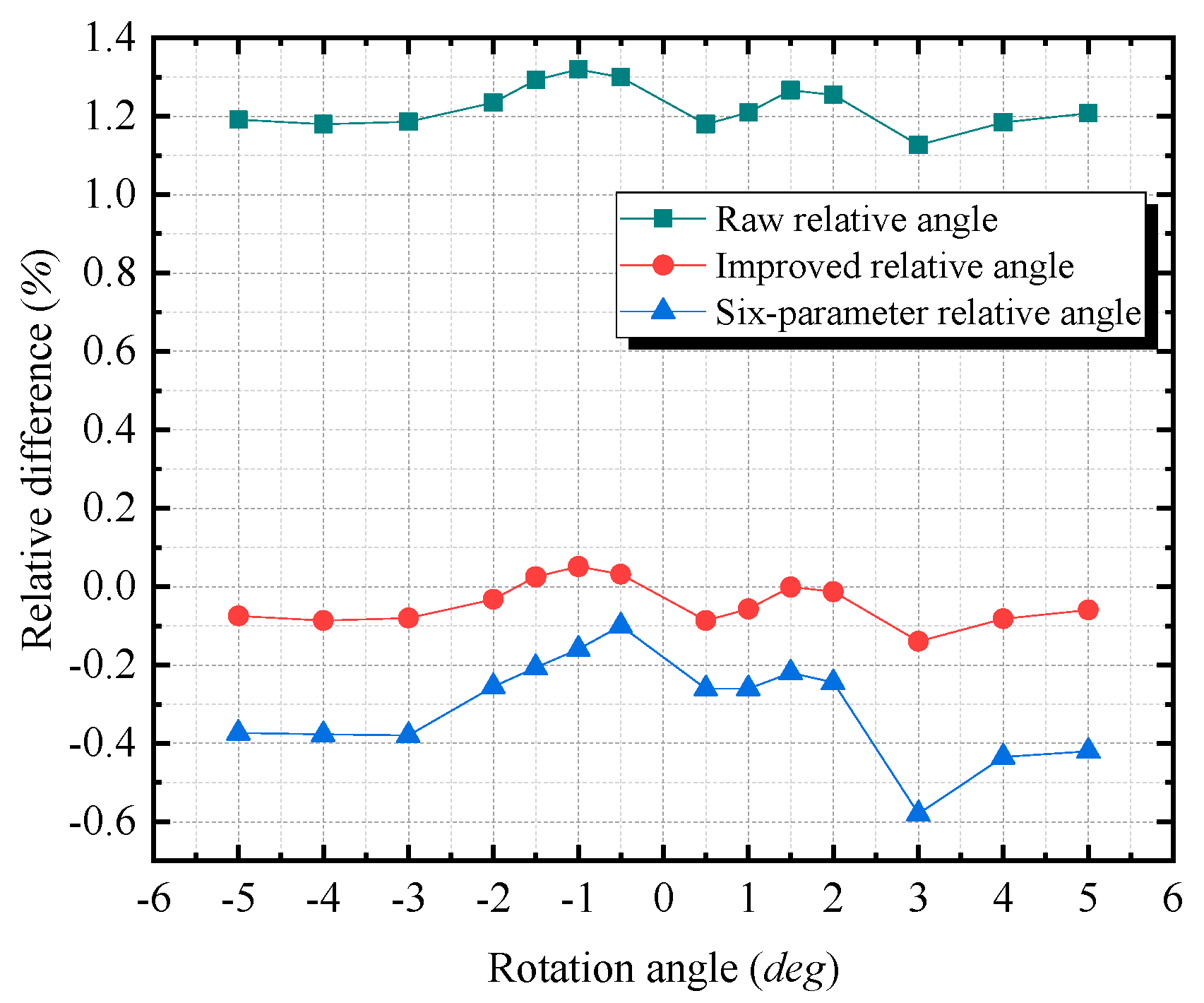
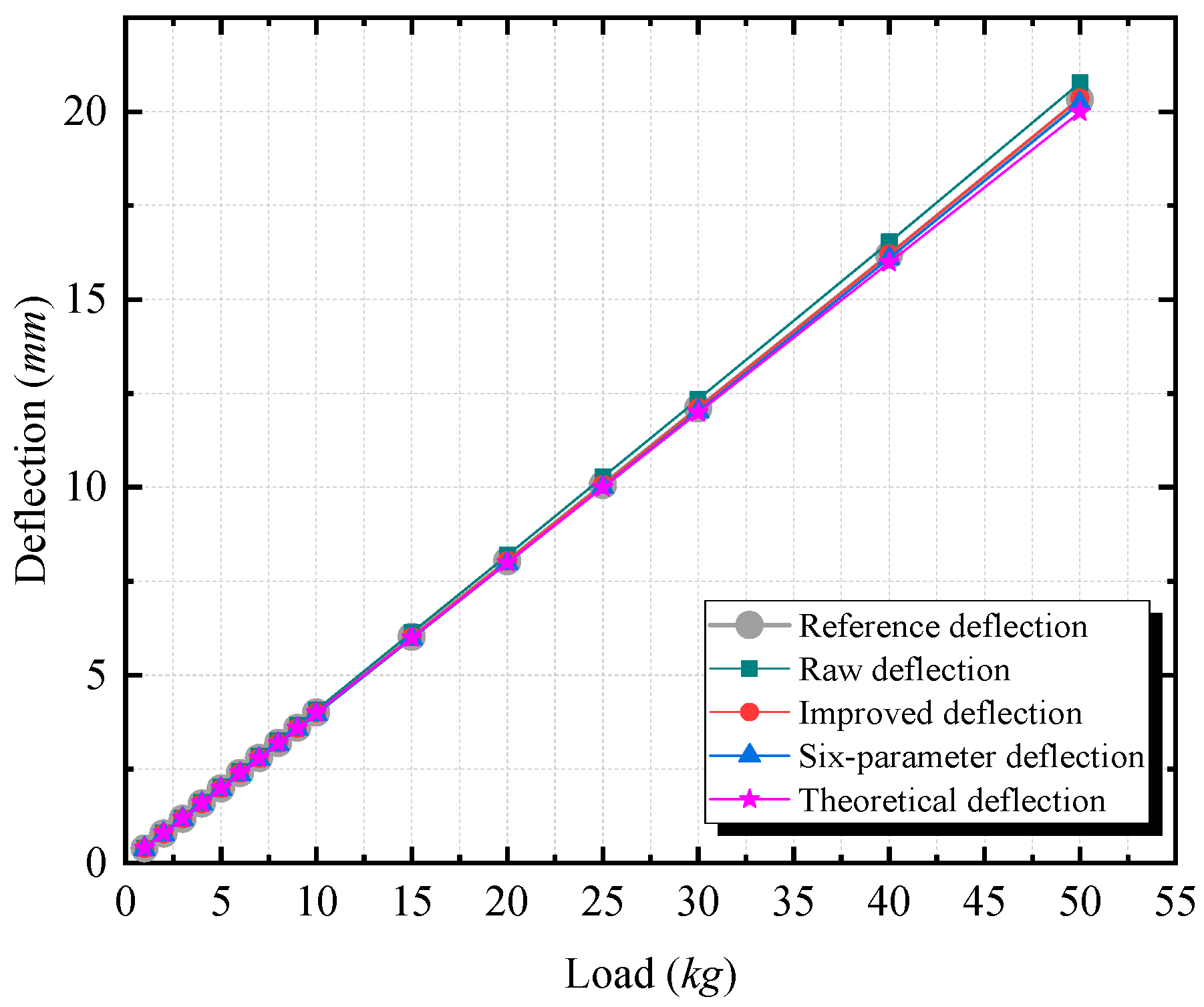
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Laine, J.; Mougenot, D. Benefits of MEMS based seismic accelerometers for oil exploration. In Proceedings of the TRANSDUCERS 2007–2007 International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2007; pp. 1473–1477. [Google Scholar]
- Hoult, N.A.; Fidler, P.R.; Hill, P.G.; Middleton, C.R. Long-term wireless structural health monitoring of the Ferriby Road Bridge. J. Bridge Eng. 2010, 15, 153–159. [Google Scholar] [CrossRef] [Green Version]
- Hou, S.; Zeng, C.; Zhang, H.; Ou, J. Monitoring interstory drift in buildings under seismic loading using MEMS inclinometers. Constr. Build. Mater. 2018, 185, 453–467. [Google Scholar] [CrossRef]
- Srinivasan, S.; Muck, A.J.; Chou, P.W. Real-time slope and wall monitoring and reporting using 3-D MEMS-based, in-place instrumentation system. In Proceedings of the GeoFlorida 2010: Advances in Analysis, Orlando, FL, USA, 20–24 February 2010; pp. 1172–1181. [Google Scholar]
- Zhang, Y.; Tang, H.; Li, C.; Lu, G.; Cai, Y.; Zhang, J.; Tan, F. Design and testing of a flexible inclinometer probe for model tests of landslide deep displacement measurement. Sensors 2018, 18, 224. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- HE, B.; JI, Y.; SHEN, R.-J. Wireless inclinometer for monitoring deformation of underground tunnel. Opt. Precis. Eng. 2013, 21, 1464–1471. [Google Scholar]
- Kionix, Y. AN 012: Accelerometer Errors. Disponibile su. 2007. Available online: http://www.kionix.com/sensors/applicationYnotes.html (accessed on 29 December 2019).
- Lu, X.; Liu, Z.; He, J. Maximum likelihood approach for low-cost mems triaxial accelerometer calibration. In Proceedings of the 2016 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 27–28 August 2016; pp. 179–182. [Google Scholar]
- Kim, M.-S.; Yu, S.-B.; Lee, K.-S. Development of a high-precision calibration method for inertial measurement unit. Int. J. Precis. Eng. Manuf. 2014, 15, 567–575. [Google Scholar] [CrossRef]
- Fan, A. How to Improve the Accuracy of Inclination Measurement Using an Accelerometer. Analog Dialogue 2018, 52, 1–2. [Google Scholar]
- Gietzelt, M.; Wolf, K.-H.; Marschollek, M.; Haux, R. Performance comparison of accelerometer calibration algorithms based on 3D-ellipsoid fitting methods. Comput. Methods Programs Biomed. 2013, 111, 62–71. [Google Scholar] [CrossRef]
- Leavitt, J.; Sideris, A.; Bobrow, J.E. High bandwidth tilt measurement using low-cost sensors. IEEE ASME Trans. Mechatron. 2006, 11, 320–327. [Google Scholar] [CrossRef]
- Luczak, S.; Oleksiuk, W.; Bodnicki, M. Sensing tilt with MEMS accelerometers. IEEE Sens. J. 2006, 6, 1669–1675. [Google Scholar] [CrossRef]
- Ang, W.T.; Khosla, P.K.; Riviere, C.N. Nonlinear regression model of a low-$ g $ MEMS accelerometer. IEEE Sens. J. 2006, 7, 81–88. [Google Scholar] [CrossRef]
- Parsa, K.; Lasky, T.A.; Ravani, B. Design and implementation of a mechatronic, all-accelerometer inertial measurement unit. IEEE ASME Trans. Mechatron. 2007, 12, 640–650. [Google Scholar] [CrossRef]
- Frosio, I.; Pedersini, F.; Borghese, N.A. Autocalibration of triaxial MEMS accelerometers with automatic sensor model selection. IEEE Sens. J. 2012, 12, 2100–2108. [Google Scholar] [CrossRef]
- Frosio, I.; Pedersini, F.; Borghese, N.A. Autocalibration of MEMS accelerometers. IEEE Trans. Instrum. Meas. 2008, 58, 2034–2041. [Google Scholar] [CrossRef]
- Won, S.-H.P.; Golnaraghi, F. A triaxial accelerometer calibration method using a mathematical model. IEEE Trans. Instrum. Meas. 2009, 59, 2144–2153. [Google Scholar] [CrossRef]
- Qian, J.; Fang, B.; Yang, W.; Luan, X.; Nan, H. Accurate tilt sensing with linear model. IEEE Sens. J. 2011, 11, 2301–2309. [Google Scholar] [CrossRef]
- Die, H.; Chunnian, Z.; Hong, L. Autocalibration method of MEMS accelerometer. In Proceedings of the 2011 International Conference on Mechatronic Science, Electric Engineering and Computer (MEC), Jilin, China, 19–22 August 2011; pp. 1348–1351. [Google Scholar]
- Fisher, C.J. Using an Accelerometer for Inclination Sensing. In AN-1057, Application Note; Analog Devices: Norwood, MA, USA, 2010. [Google Scholar]
- Zhu, L.; Fu, Y.; Chow, R.; Spencer, B.; Park, J.; Mechitov, K. Development of a high-sensitivity wireless accelerometer for structural health monitoring. Sensors 2018, 18, 262. [Google Scholar] [CrossRef]
- Swartz, R.A.; Lynch, J.P.; Zerbst, S.; Sweetman, B.; Rolfes, R. Structural monitoring of wind turbines using wireless sensor networks. Smart Struct. Syst. 2010, 6, 183–196. [Google Scholar] [CrossRef] [Green Version]
- Cho, S.; Yun, C.-B.; Lynch, J.P.; Zimmerman, A.T.; Spencer, B.F., Jr.; Nagayama, T. Smart wireless sensor technology for structural health monitoring of civil structures. Steel Struct. 2008, 8, 267–275. [Google Scholar]
- Spencer, B.F., Jr.; Park, J.W.; Mechitov, K.A.; Jo, H.; Agha, G. Next generation wireless smart sensors toward sustainable civil infrastructure. Procedia Eng. 2017, 171, 5–13. [Google Scholar] [CrossRef]
- STMicroelectronics. MEMS Inertial Sensor High Performance 3-axis±2/±6g Ultracompact Linear Accelerometer Rev. 3.0. LIS344ALH; STMicroelectronics: Geneva, Switzerland, 2008. [Google Scholar]
- Whelan, M.J.; Janoyan, K.D. Design of a robust, high-rate wireless sensor network for static and dynamic structural monitoring. J. Intell. Mater. Syst. Struct. 2009, 20, 849–863. [Google Scholar] [CrossRef]
- Lis3l02al Mems Inertial Sensor: 3-axis-+/−2g Ultracompact Linear Accelerometer; No. CD00068496ST; Microelectronics: Geneva, Switzerland, 2007.
- Nagayama, T.; Spencer, B.F., Jr.; Rice, J.A. Structural health monitoring utilizing Intel’s Imote2 wireless sensor platform. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 18–22 March 2007; p. 652943. [Google Scholar]
- LIS3L02DQ MEMS Inertial Sensor; Microelectronics: Geneva, Switzerland, 2005.
- Łuczak, S. Guidelines for tilt measurements realized by MEMS accelerometers. Int. J. Precis. Eng. Manuf. 2014, 15, 489–496. [Google Scholar] [CrossRef]
- Łuczak, S.; Grepl, R.; Bodnicki, M. Selection of MEMS accelerometers for tilt measurements. J. Sens. 2017, 2017, 9796146. [Google Scholar] [CrossRef]
- Lee, J.-J.; Shinozuka, M. Real-time displacement measurement of a flexible bridge using digital image processing techniques. Exp. Mech. 2006, 46, 105–114. [Google Scholar] [CrossRef]
- Murawski, K. Method of Measuring the Distance to an Object Based on One Shot Obtained from a Motionless Camera with a Fixed-Focus Lens. Acta Phys. Pol. A 2015, 127, 1591. [Google Scholar] [CrossRef]
- Rong, W.; Li, Z.; Zhang, W.; Sun, L. An improved CANNY edge detection algorithm. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 577–582. [Google Scholar]
- Chaple, G.; Daruwala, R. Design of Sobel operator based image edge detection algorithm on FPGA. In Proceedings of the 2014 International Conference on Communication and Signal Processing, Melmaruvathur, India, 3–5 April 2014; pp. 788–792. [Google Scholar]
- Huang, S.; Ding, W.; Huang, Y. An Accurate Image Measurement Method Based on a Laser-Based Virtual Scale. Sensors 2019, 19, 3955. [Google Scholar] [CrossRef] [Green Version]
- Sun, W.-J.; Sun, J.-N.; Bu, W.-B.; Meng, Z. New phase measurement method for laser rangefinder. In Proceedings of the 5th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Optical Test and Measurement Technology and Equipment, Dalian, China, 26–29 April 2010; p. 76565X. [Google Scholar]
- Li, M.; Xie, W.; Zhu, J.; Ren, J.; Xiao, F.; Meng, Z. The analysis of digital phase-shift measuring methods for dual-frequency laser range finder. In Proceedings of the 11th Laser Metrology for Precision Measurement and Inspection in Industry 2014, Tsukuba, Japan, 2–5 September 2014. [Google Scholar]
- ADXL354/ADXL355 Data Sheet Rev. A; Analog Devices Inc. 2018. Available online: http://www.analog.com/en/products/sensors-mems/accelerometers/adxl355.html (accessed on 3 January 2019).
- Yu, Y.; Liu, H.; Li, D.; Mao, X.; Ou, J. Bridge deflection measurement using wireless mems inclination sensor systems. Int. J. Smart Sens. Intell. Syst. 2013, 6, 38–57. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | CXL01LF [23] | CXL02LF [24] | LIS344ALH [25,26] | LIS3L02AL [27,28] | LIS3L02DQ [29,30] | |
|---|---|---|---|---|---|---|
| Specification | ||||||
| Interface | Analog | Analog | Analog | Analog | Digital | |
| Noise-Density () | 70 | 140 | 50 | 50 | 110 | |
| Range (g) | ±2 | ±1 | ±2 | ±2 | ±2 | |
| Offset Change due to Temperature (mg/°C) | FC 2 | FC | ±0.4 | ±0.5 | ±0.8 | |
| Sensitivity Change due to Temperature (%/°C) | FC | FC | ±0.01 | ±0.01 | ±0.02 | |
| Cross Axis Sensitivity (%) | FC | FC | ±2 | ±2 | ±2 | |
| Maximum Sensitivity mismatch (%) | 5 | 5 | 5 | 5 | 5 | |
| Offset (mg) | 15 | 30 | 50 | 60 | 100 | |
| Err 1 (deg) | 0.860 | 1.719 | 2.866 | 3.440 | 2.923 | |
| Specification | Value |
|---|---|
| Interface | Digital |
| Noise-Density () | 25 |
| 0 g Offset (mg) | ±25 |
| Range (g) | ±2.048/±4.096/±8.192 |
| ADC | 20-bit |
| Output Data Rate (Hz) | Hz |
| Specification | Value |
|---|---|
| Manufacturer | South Group |
| Dimensions | |
| Weight | 5.2 kg |
| Max Measurement Distance | 400 m |
| Resolution of Angle Measurement | 0.0002° |
| Accuracy of Angle Measurement | ±0.0005° |
| Specification | Value |
|---|---|
| Sensor Size | |
| Sensor Type | CMOS |
| Effective Pixels | 24 megapixels |
| Max Resolution | |
| Focal Length |
| Specification | Value |
|---|---|
| Manufacturer | UNI-T |
| Accuracy of Distance Measurement | |
| Max Measurement Distance | 150 m |
| Specification | Value |
|---|---|
| Dimensions | |
| Lattice | |
| Center Distance | 40 mm |
| Dot Diameter | |
| Accuracy |
| L (mm) | d (mm) | Avg. (mg) | Std. (mg) | |||
|---|---|---|---|---|---|---|
| 3897.0 | 107.78 | 1.605 | −12.7 | 0.6 | −12.6 | 0.4 |
| 160.09 | 2.384 | −13.1 | 0.4 | |||
| 216.80 | 3.224 | −12.3 | 0.3 | |||
| 279.01 | 4.146 | −12.3 | 0.2 |
| Parameters | Value |
|---|---|
| Scale Factor of x-axis | 1.00 |
| Scale Factor of y-axis | 1.02 |
| Scale Factor of z-axis | 1.01 |
| Offset of x-axis (mg) | −3.03 |
| Offset of y-axis (mg) | −8.90 |
| Offset of z-axis (mg) | −12.69 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Wang, W.; Huang, S.; Ding, W. An Improved Calibration Technique for MEMS Accelerometer-Based Inclinometers. Sensors 2020, 20, 452. https://doi.org/10.3390/s20020452
Zhu J, Wang W, Huang S, Ding W. An Improved Calibration Technique for MEMS Accelerometer-Based Inclinometers. Sensors. 2020; 20(2):452. https://doi.org/10.3390/s20020452
Chicago/Turabian StyleZhu, Jiaxin, Weifeng Wang, Shiping Huang, and Wei Ding. 2020. "An Improved Calibration Technique for MEMS Accelerometer-Based Inclinometers" Sensors 20, no. 2: 452. https://doi.org/10.3390/s20020452
APA StyleZhu, J., Wang, W., Huang, S., & Ding, W. (2020). An Improved Calibration Technique for MEMS Accelerometer-Based Inclinometers. Sensors, 20(2), 452. https://doi.org/10.3390/s20020452