An Analysis of the Eurasian Tectonic Plate Motion Parameters Based on GNSS Stations Positions in ITRF2014


Abstract
:1. Introduction
- Δϕ, Δλ—displacement of the observational station position in latitude and longitude;
- ϕ, λ—observational station position (GNSS, SLR, DORIS, VLBI);
- Φ, Λ, ω—plate motion parameters (the position of the rotation pole in latitude and longitude, and the angular rotation speed, respectively).
2. Materials and Methods
3. Tectonic Plate Theory for the Eurasian Plate
4. Results and Discussion
5. Conclusions
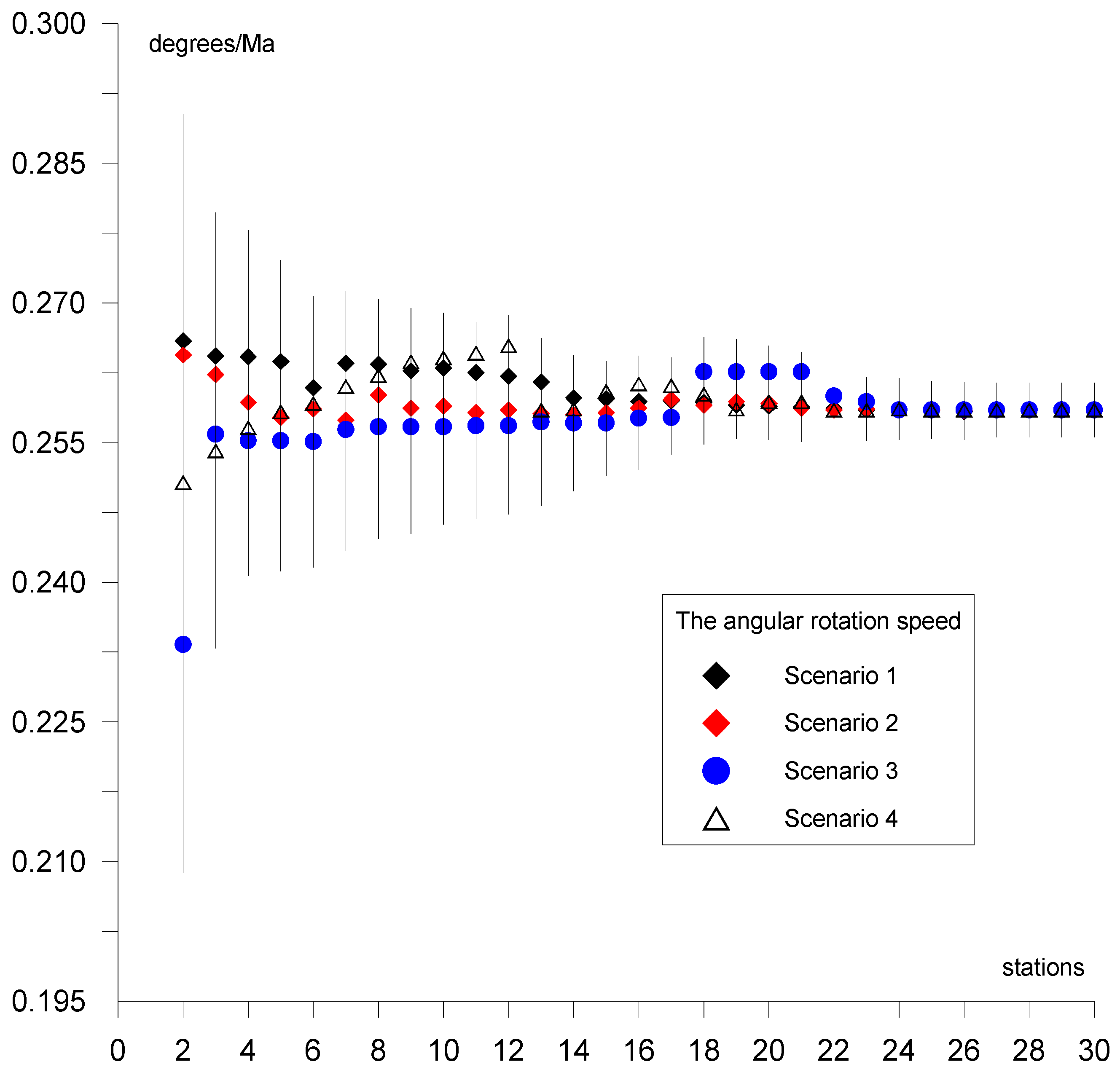
- The plate motion parameters for the final solution based on 120 (scenario 1 + scenario 2 + scenario 3 + scenario 4) GNSS station positions taken from ITRF2014 are equal to Φ = 54.81° ± 0.37° for latitude, Λ = 261.04° ± 0.48° for longitude, and ω = 0.2585°/Ma ± 0.0025°/Ma for rotation speed.
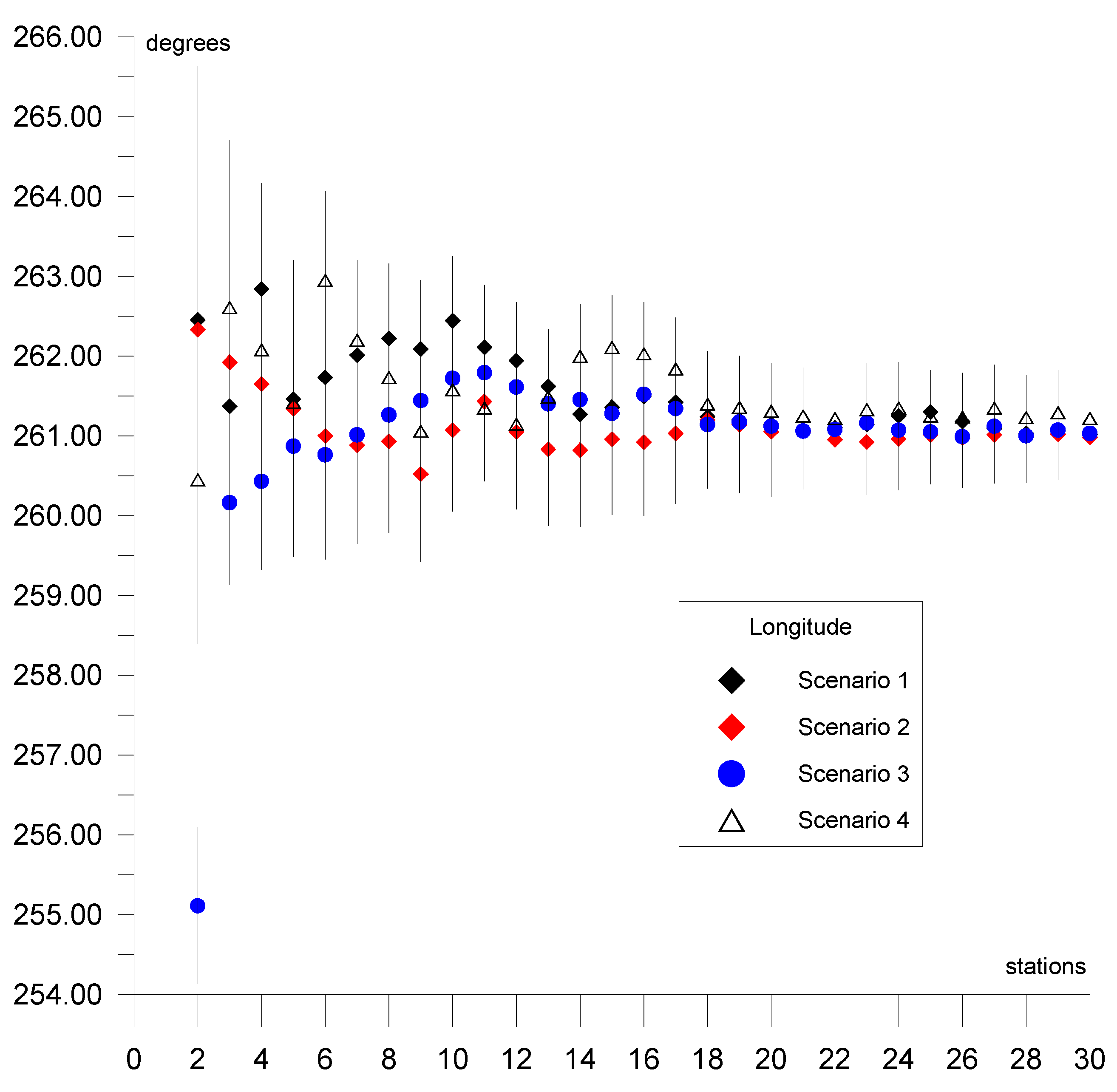
- The selection of suitable stations for determining the parameters allows the determination on the basis of approximately 20 stations to be made, as shown in the four calculation scenarios. Adding more stations to the calculations results in a change in the value of the determined parameters by a value that does not exceed the formal error.
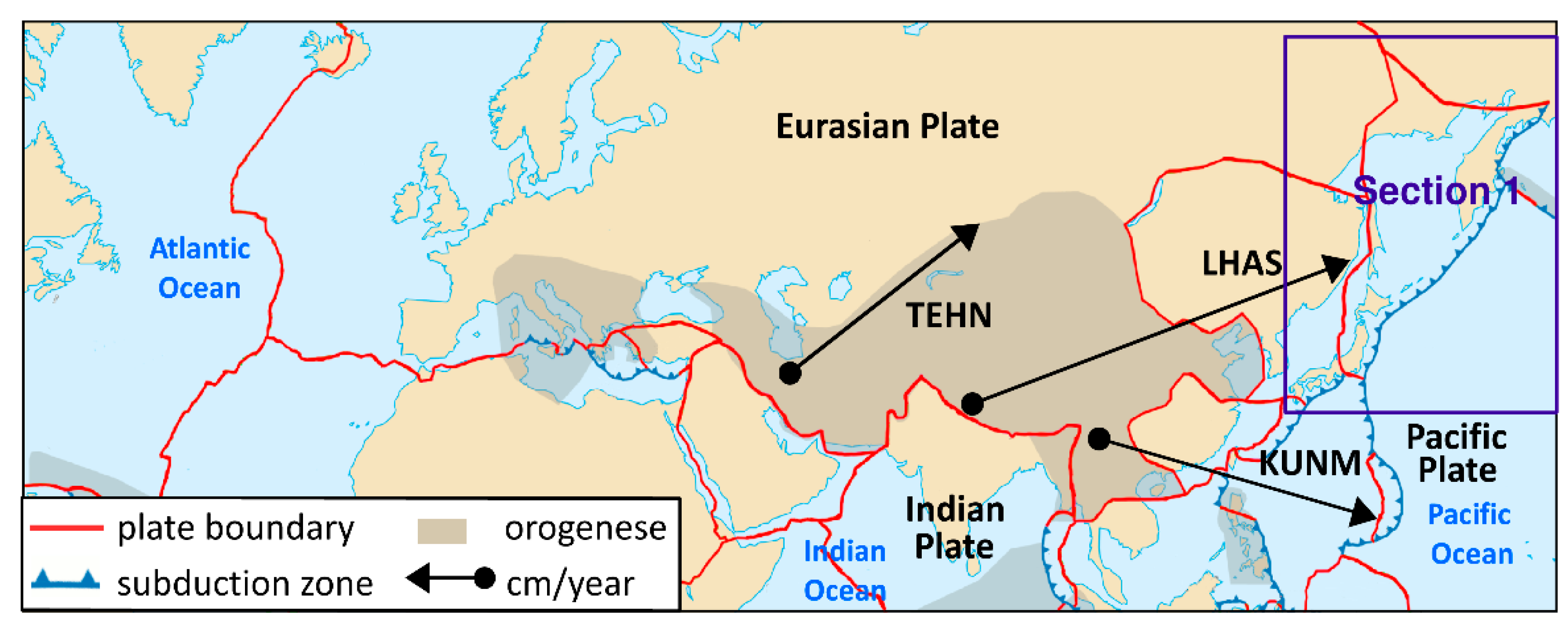
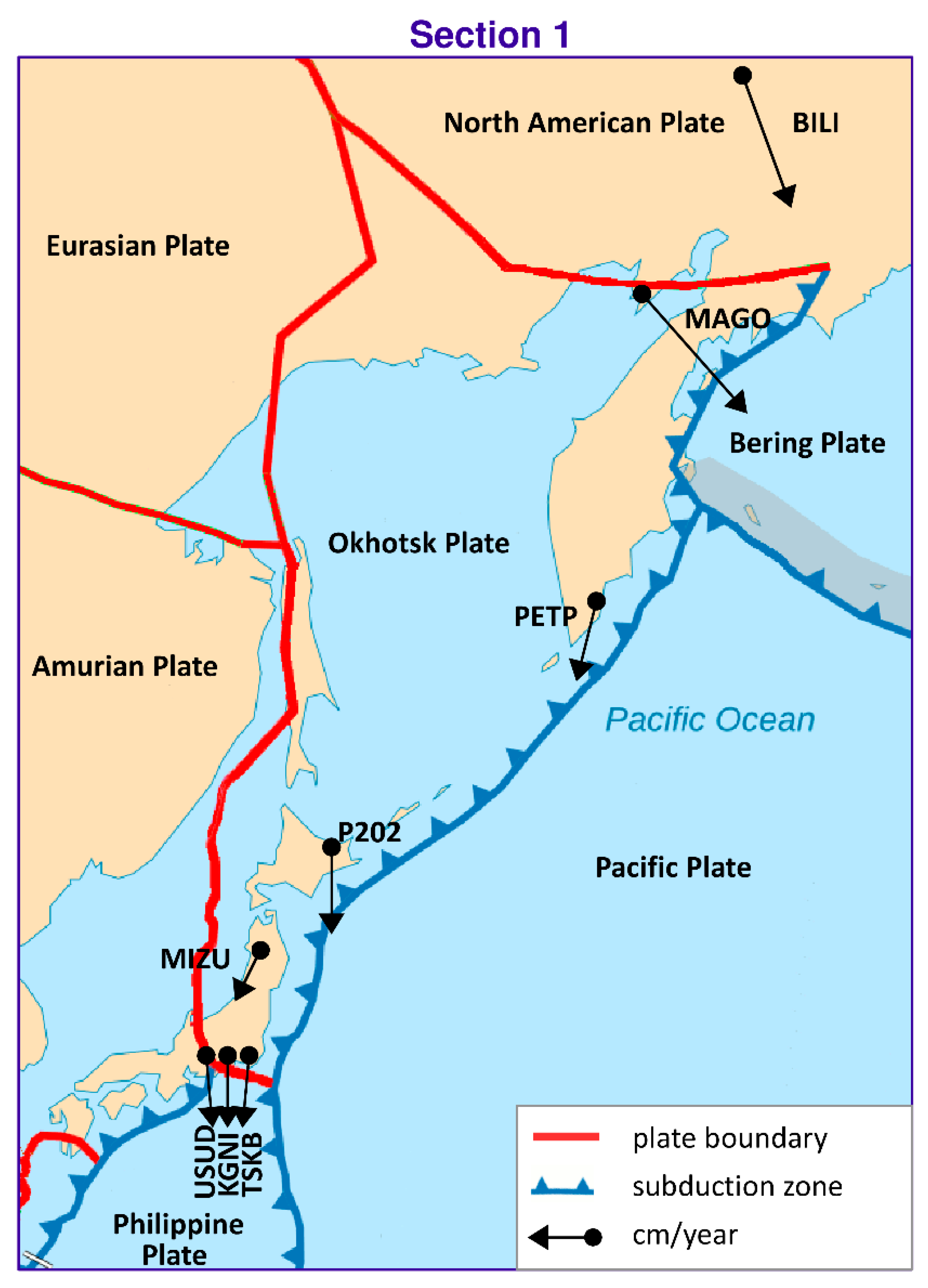
- The geological model of the Eurasian plate is the most complicated on earth. The Eurasian plate includes a subduction zone in the convergent eastern boundary. Part of the North American plate, on which Bilibino (BILI) station is situated, is located in the eastern section of the Eurasian continent. The annual shift of this station is not consistent with the Eurasian plate motion. This station cannot be included in the solution because of a change in the pole rotation of the plate parameters by approx. 2 degrees in latitude, which corresponds to 200 km, and 1.5 degrees in longitude, which corresponds to 150 km. Magadan (MAGO) station is located on the boundary of the American and Okhotsk plates. The annual shift of the station is not consistent with the Eurasian plate motion by approx. 1 degree in latitude, which equals 100 km, and 1 degree in longitude, which also equals 100 km, therefore this station cannot be used in the solution. Petropavlovsk (PETP) station is located on the Okhotsk plate on Kamchatka Peninsula. The shift of this station is also not consistent with the Eurasian plate motion, and amounts to 4.5 degrees in latitude, which corresponds to 450 km, and 6.8 degrees in longitude, which equals 680 km, hence the station cannot be used in the solution. Teheran (TEHN) station is also not used in the solution because it is located near the boundary of the Iran plate in a high seismic activity region, despite a relatively small change in the pole rotation of plate parameters, by approx. 0.2 degrees in latitude, which corresponds to 20 km, and 0.4 degrees in longitude, which equals 40 km.
- The Eurasian plate contains areas of high seismic activity and cracked boundaries, both convergent and divergent, with other tectonic plates, such as the Pacific, Deccan, Iran, Arabian, and Anatolian plates. Often, shifts of the analyzed stations located on the Eurasian plate are not compatible with the tectonic plate motion; for example, Lhasa (LHAS) station, which is located on the boundary of the Eurasian plate and the Deccan plate in the South Tibet and Himalaya mountains, is in a very active and cracked region. This station increases the error of the estimated plate parameters significantly, by approx. 3 degrees in latitude, equaling 300 km, and 4 degrees in longitude, equaling 400 km. The station is not included in the solution.
- The Japanese stations of Mizusawa (MIZU), Koganei (KGNI), Usuda (USUD), Tsukuba (TSKB), and Abashiri (P202) are located in a very active and cracked area on the boundary of the Philippine plate. In this region, three cracked plates come into contact: the Pacific plate with the Okhotsk and Amur plates. Shifts of these stations are not consistent with the Eurasian plate motion and are not included in the solution.
- Wakkanai station (used in calculation scenario 4) is located on the boundary of the Amur and Okhotsk plates. The shift of this station is consistent with the Eurasian plate motion to a high degree, therefore it is included in the solution.
- The application of the sequential calculation method allows stations whose movement is not consistent with that of the entire plate to be identified and eliminated from the solution.
- Analysis and elimination of the selected stations, as shown in Table 1, is indispensable because it allows results to be obtained only on the basis of the stations with shifts that are consistent with the Eurasian plate.
- The Mediterranean Sea and surrounding areas, i.e., the Anatolian and Arabic plates, are excluded from the analysis in this work. These regions will be analyzed separately because they include a significant number of micro plates, which each has a characteristic motion that differs from that of the Eurasian plate. In the Asian part, the Deccan plate is omitted because it does not belong to the Eurasian plate.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name of the Station | [°] | [°] | [°/Ma] |
|---|---|---|---|---|
| 2 | Ny-Alesund+Bucarest | 53.04 ± 2.64 | 262.45 ± 1.79 | 0.2659 ± 0.0183 |
| 3 | 2 + Paris | 53.61 ± 2.35 | 261.37 ± 1.49 | 0.2643 ± 0.0151 |
| 4 | 3 + Yerevan | 54.00 ± 1.90 | 262.84 ± 1.33 | 0.2642 ± 0.0136 |
| 5 | 4 + Simeiz | 53.72 ± 1.69 | 261.46 ± 1.20 | 0.2637 ± 0.0109 |
| 6 | 5 + Copenhaguen | 53.21 ± 1.45 | 261.73 ± 1.10 | 0.2609 ± 0.0098 |
| 7 | 6 + Uzhgorod | 53.49 ± 1.28 | 262.01 ± 1.01 | 0.2635 ± 0.0077 |
| 8 | 7 + Graz | 53.82 ± 1.10 | 262.22 ± 0.94 | 0.2634 ± 0.0070 |
| 9 | 8 + Borowiec | 54.00 ± 0.97 | 262.09 ± 0.86 | 0.2627 ± 0.0067 |
| 10 | 9 + Venezia | 54.06 ± 0.87 | 262.44 ± 0.81 | 0.2630 ± 0.0059 |
| 11 | 10 + Wettzell | 54.28 ± 0.80 | 262.11 ± 0.78 | 0.2625 ± 0.0052 |
| 12 | 11 + Lviv | 54.11 ± 0.77 | 261.94 ± 0.73 | 0.2621 ± 0.0048 |
| 13 | 12 + Sofia | 54.35 ± 0.74 | 261.62 ± 0.71 | 0.2615 ± 0.0045 |
| 14 | 13 + Novossibirsk | 54.21 ± 0.72 | 261.27 ± 0.69 | 0.2598 ± 0.0040 |
| 15 | 14 + Marseille | 54.40 ± 0.68 | 261.36 ± 0.68 | 0.2597 ± 0.0040 |
| 16 | 15 + Shanghai | 54.62 ± 0.67 | 261.49 ± 0.64 | 0.2594 ± 0.0038 |
| 17 | 16 + Pecny | 54.73 ± 0.66 | 261.42 ± 0.63 | 0.2595 ± 0.0038 |
| 18 | 17 + Jozefoslaw | 54.70 ± 0.63 | 261.24 ± 0.57 | 0.2593 ± 0.0037 |
| 19 | 18 + Domen | 54.70 ± 0.60 | 261.20 ± 0.55 | 0.2590 ± 0.0035 |
| 20 | 19 + Ulan Bator | 54.76 ± 0.60 | 261.15 ± 0.53 | 0.2589 ± 0.0033 |
| 21 | 20 + Perugia | 54.78 ± 0.57 | 261.07 ± 0.53 | 0.2588 ± 0.0032 |
| 22 | 21 + Kitab | 54.69 ± 0.57 | 261.10 ± 0.53 | 0.2587 ± 0.0031 |
| 23 | 22 + Grasse | 54.63 ± 0.51 | 261.14 ± 0.53 | 0.2585 ± 0.0029 |
| 24 | 23 + Madrid Robledo | 54.46 ± 0.50 | 261.25 ± 0.53 | 0.2585 ± 0.0028 |
| 25 | 24 + Zimmerwald | 54.55 ± 0.48 | 261.30 ± 0.52 | 0.2585 ± 0.0028 |
| 26 | 25 + Istanbul | 54.65 ± 0.48 | 261.18 ± 0.52 | 0.2583 ± 0.0027 |
| 27 | 26 + Klaipeda | 54.70 ± 0.48 | 261.09 ± 0.52 | 0.2585 ± 0.0026 |
| 28 | 27 + Irkoutsk | 54.84 ± 0.47 | 261.03 ± 0.51 | 0.2585 ± 0.0026 |
| 29 | 28 + Herstmonceux | 54.90 ± 0.47 | 261.07 ± 0.50 | 0.2585 ± 0.0026 |
| 30 | 29 + Chumysh | 54.87 ± 0.47 | 261.02 ± 0.50 | 0.2585 ± 0.0026 |
Appendix B
| No. | Name of the Station | [°] | [°] | [°/Ma] |
|---|---|---|---|---|
| 2 | Metsahovi+Matera | 53.64 ± 2.75 | 262.33 ± 3.30 | 0.2644 ± 0.0259 |
| 3 | 2 + Trondheim | 53.18 ± 2.25 | 261.88 ± 2.77 | 0.2621 ± 0.0176 |
| 4 | 3 + Potsdam | 53.55 ± 1.99 | 261.65 ± 2.33 | 0.2593 ± 0.0136 |
| 5 | 4 + Toulouse | 53.74 ± 1.54 | 261.34 ± 1.86 | 0.2577 ± 0.0123 |
| 6 | 5 + La Rochelle | 54.13 ± 1.31 | 261.00 ± 1.55 | 0.2586 ± 0.0093 |
| 7 | 6 + Villafranca | 54.88 ± 1.00 | 260.88 ± 1.23 | 0.2574 ± 0.0085 |
| 8 | 7 + Torino I | 55.10 ± 0.86 | 260.93 ± 1.15 | 0.2601 ± 0.0080 |
| 9 | 8 + Changchun | 55.32 ± 0.79 | 260.52 ± 1.10 | 0.2587 ± 0.0076 |
| 10 | 9 + Wuhan | 55.06 ± 0.74 | 261.07 ± 1.02 | 0.2589 ± 0.0069 |
| 11 | 10 + Onsala | 55.00 ± 0.71 | 261.43 ± 1.00 | 0.2582 ± 0.0063 |
| 12 | 11 + Vaasa | 54.95 ± 0.66 | 261.05 ± 0.97 | 0.2585 ± 0.0059 |
| 13 | 12 + Penc | 54.89 ± 0.62 | 260.83 ± 0.96 | 0.2581 ± 0.0054 |
| 14 | 13 + Wroclaw | 54.79 ± 0.62 | 260.82 ± 0.96 | 0.2580 ± 0.0052 |
| 15 | 14 + Nicea | 54.72 ± 0.60 | 260.96 ± 0.95 | 0.2582 ± 0.0048 |
| 16 | 15 + Chize | 54.80 ± 0.54 | 260.92 ± 0.92 | 0.2587 ± 0.0045 |
| 17 | 16 + Boras | 54.87 ± 0.53 | 261.03 ± 0.88 | 0.2596 ± 0.0044 |
| 18 | 17 + Stavanger | 54.86 ± 0.50 | 261.20 ± 0.86 | 0.2590 ± 0.0042 |
| 19 | 18 + Mendeleevo | 54.81 ± 0.49 | 261.14 ± 0.86 | 0.2594 ± 0.0040 |
| 20 | 19 + Port Vendres | 54.84 ± 0.44 | 261.05 ± 0.81 | 0.2592 ± 0.0039 |
| 21 | 20 + Cagliari | 54.86 ± 0.43 | 261.05 ± 0.72 | 0.2587 ± 0.0036 |
| 22 | 21 + Teddington | 54.86 ± 0.42 | 260.95 ± 0.69 | 0.2585 ± 0.0036 |
| 23 | 22 + Roquetes | 54.81 ± 0.41 | 260.92 ± 0.66 | 0.2586 ± 0.0034 |
| 24 | 23 + Cannes | 54.81 ± 0.40 | 260.96 ± 0.64 | 0.2586 ± 0.0033 |
| 25 | 24 + Kootwijk | 54.82 ± 0.40 | 261.01 ± 0.62 | 0.2585 ± 0.0031 |
| 26 | 25 + Terschelling | 54.82 ± 0.39 | 260.97 ± 0.62 | 0.2584 ± 0.0031 |
| 27 | 26 + Westerbork | 54.85 ± 0.39 | 261.01 ± 0.61 | 0.2585 ± 0.0029 |
| 28 | 27 + Braunschweig | 54.83 ± 0.38 | 261.00 ± 0.59 | 0.2585 ± 0.0029 |
| 29 | 28 + Poltava | 54.80 ± 0.38 | 261.02 ± 0.57 | 0.2585 ± 0.0029 |
| 30 | 29 + Tixi Seismic | 54.84 ± 0.38 | 260.98 ± 0.57 | 0.2585 ± 0.0029 |
Appendix C
| No. | Name of the Station | [°] | [°] | [°/Ma] |
|---|---|---|---|---|
| 2 | Brest+Joensuu | 51.62 ± 0.85 | 255.11 ± 0.98 | 0.2333 ± 0.0245 |
| 3 | 2 + Padova | 53.26 ± 0.77 | 260.16 ± 0.92 | 0.2559 ± 0.0230 |
| 4 | 3 + Redu | 53.45 ± 0.61 | 260.43 ± 0.74 | 0.2552 ± 0.0145 |
| 5 | 4 + Yebes | 54.17 ± 0.60 | 260.87 ± 0.62 | 0.2552 ± 0.0140 |
| 6 | 5 + Wladyslawowo | 54.30 ± 0.59 | 260.76 ± 0.58 | 0.2551 ± 0.0135 |
| 7 | 6 + Warnemuende | 54.23 ± 0.59 | 261.01 ± 0.56 | 0.2564 ± 0.0130 |
| 8 | 7 + Sassnitz | 54.52 ± 0.58 | 261.26 ± 0.55 | 0.2567 ± 0.0120 |
| 9 | 8 + Oberpfaffenhofe | 54.52 ± 0.58 | 261.44 ± 0.53 | 0.2567 ± 0.0115 |
| 10 | 9 + Osan air base | 54.63 ± 0.57 | 261.72 ± 0.52 | 0.2567 ± 0.0105 |
| 11 | 10 + Badary | 54.77 ± 0.56 | 261.79 ± 0.52 | 0.2568 ± 0.0100 |
| 12 | 11 + Hsinchu | 54.71 ± 0.56 | 261.61 ± 0.50 | 0.2568 ± 0.0095 |
| 13 | 12 + Zwenigorod | 54.88 ± 0.55 | 261.40 ± 0.50 | 0.2572 ± 0.0090 |
| 14 | 13 + Daejeon | 55.00 ± 0.55 | 261.45 ± 0.50 | 0.2571 ± 0.0073 |
| 15 | 14 + Suwon-Shi | 54.81 ± 0.54 | 261.28 ± 0.49 | 0.2571 ± 0.0057 |
| 16 | 15 + Vilhelmina | 54.66 ± 0.54 | 261.52 ± 0.49 | 0.2576 ± 0.0055 |
| 17 | 16 + Shaanxi | 54.62 ± 0.53 | 261.34 ± 0.48 | 0.2577 ± 0.0040 |
| 18 | 17 + Beijng | 54.80 ± 0.52 | 261.14 ± 0.48 | 0.2626 ± 0.0037 |
| 19 | 18 + Borkum | 54.83 ± 0.49 | 261.17 ± 0.48 | 0.2626 ± 0.0035 |
| 20 | 19 + Helgoland Islan | 54.79 ± 0.46 | 261.12 ± 0.48 | 0.2626 ± 0.0028 |
| 21 | 20 + Wabern | 54.67 ± 0.43 | 261.06 ± 0.48 | 0.2626 ± 0.0021 |
| 22 | 21 + Cascais | 54.78 ± 0.42 | 261.08 ± 0.47 | 0.2600 ± 0.0020 |
| 23 | 22 + Palma De mallor | 54.80 ± 0.40 | 261.16 ± 0.47 | 0.2594 ± 0.0020 |
| 24 | 23 + Alicante | 54.68 ± 0.39 | 261.07 ± 0.47 | 0.2585 ± 0.0019 |
| 25 | 24 + Morpeth | 54.65 ± 0.38 | 261.05 ± 0.47 | 0.2585 ± 0.0019 |
| 26 | 25 + Brussels Ukkle | 54.59 ± 0.37 | 260.99 ± 0.46 | 0.2585 ± 0.0018 |
| 27 | 26 + Moscow | 54.56 ± 0.37 | 261.12 ± 0.46 | 0.2585 ± 0.0018 |
| 28 | 27 + Khabarovsk | 54.56 ± 0.36 | 261.00 ± 0.46 | 0.2585 ± 0.0018 |
| 29 | 28 + Esbjerg | 54.55 ± 0.36 | 261.07 ± 0.46 | 0.2585 ± 0.0018 |
| 30 | 29 + Krasnoyarsk | 54.56 ± 0.36 | 261.03 ± 0.46 | 0.2585 ± 0.0018 |
Appendix D
| No. | Name of the Station | [°] | [°] | [°/Ma] |
|---|---|---|---|---|
| 2 | Ajaccio+Saint Jean des | 55.09 ± 1.86 | 260.45 ± 2.06 | 0.2507 ± 0.0119 |
| 3 | 2 + Martsbo | 55.30 ± 0.75 | 262.61 ± 1.29 | 0.2541 ± 0.0056 |
| 4 | 3 + Visby | 55.56 ± 0.69 | 262.08 ± 1.25 | 0.2566 ± 0.0052 |
| 5 | 4 + Innsbruck Haf | 55.22 ± 0.68 | 261.42 ± 1.19 | 0.2583 ± 0.0050 |
| 6 | 5 + Borowa Gora | 55.03 ± 0.67 | 262.95 ± 1.12 | 0.2592 ± 0.0048 |
| 7 | 6 + Lamkowko | 55.28 ± 0.64 | 262.20 ± 1.00 | 0.2610 ± 0.0044 |
| 8 | 7 + Riga | 55.16 ± 0.62 | 261.73 ± 0.90 | 0.2622 ± 0.0040 |
| 9 | 8 + Kharkiv | 54.99 ± 0.62 | 261.06 ± 0.84 | 0.2637 ± 0.0037 |
| 10 | 9 + Tashkent | 54.83 ± 0.61 | 261.58 ± 0.70 | 0.2641 ± 0.0033 |
| 11 | 10 + Mikolajev | 54.75 ± 0.61 | 261.35 ± 0.67 | 0.2646 ± 0.0033 |
| 12 | 11 + Svetloe | 55.00 ± 0.61 | 261.15 ± 0.66 | 0.2654 ± 0.0033 |
| 13 | 12 + Zelenchukskaya | 55.24 ± 0.61 | 261.49 ± 0.65 | 0.2585 ± 0.0032 |
| 14 | 13 + Redzikowo | 55.15 ± 0.61 | 262.00 ± 0.65 | 0.2586 ± 0.0031 |
| 15 | 14 + Arti | 55.00 ± 0.60 | 262.11 ± 0.65 | 0.2605 ± 0.0031 |
| 16 | 15 + Poligan Bishk | 54.76 ± 0.60 | 262.05 ± 0.64 | 0.2615 ± 0.0031 |
| 17 | 16 + Morpeth | 54.99 ± 0.58 | 261.84 ± 0.64 | 0.2611 ± 0.0030 |
| 18 | 17 + Genova | 54.90 ± 0.57 | 261.40 ± 0.62 | 0.2602 ± 0.0029 |
| 19 | 18 + Lowestoft | 54.78 ± 0.55 | 261.36 ± 0.61 | 0.2586 ± 0.0029 |
| 20 | 19 + North Shields | 54.73 ± 0.55 | 261.31 ± 0.60 | 0.2594 ± 0.0028 |
| 21 | 20 + Ganovce | 54.64 ± 0.51 | 261.27 ± 0.60 | 0.2594 ± 0.0027 |
| 22 | 21 + Vacov | 54.54 ± 0.49 | 261.21 ± 0.59 | 0.2585 ± 0.0025 |
| 23 | 22 + Bellmunt de Seg | 54.56 ± 0.47 | 261.33 ± 0.58 | 0.2585 ± 0.0025 |
| 24 | 23 + Cantabria | 54.71 ± 0.46 | 261.35 ± 0.57 | 0.2586 ± 0.0024 |
| 25 | 24 + Valencia | 54.60 ± 0.44 | 261.25 ± 0.55 | 0.2585 ± 0.0024 |
| 26 | 25 + Thessaloniki | 54.52 ± 0.43 | 261.22 ± 0.54 | 0.2585 ± 0.0024 |
| 27 | 26 + Kiev | 54.72 ± 0.42 | 261.35 ± 0.54 | 0.2585 ± 0.0024 |
| 28 | 27 + Liverpool | 54.67 ± 0.42 | 261.23 ± 0.53 | 0.2585 ± 0.0024 |
| 29 | 28 + Norilsk | 54.64 ± 0.42 | 261.29 ± 0.53 | 0.2585 ± 0.0024 |
| 30 | 29 + Wakkanai | 54.69 ± 0.41 | 261.22 ± 0.53 | 0.2585 ± 0.0024 |
References
- Rutkowska, M.; Jagoda, M. SLR technique used for description of the Earth elasticity. Artif. Satell. 2015, 50, 127–141. [Google Scholar] [CrossRef] [Green Version]
- Wegener, A. Die Entstehung der Kontinente und Ozeane; Friedr. Vieweg & Sohn Akt.-Ges: Braunschweig, Germany, 1915. [Google Scholar]
- Hilgenberg, O.C. Vom Wachsenden Ertball; Selbstverlag: Berlin, Germany, 1933. [Google Scholar]
- Vening-Meinesz, F.A. Major tectonic phenomena and the hypothesis of convection currents in the Earth. J. Geol. Soc. 1948, 103, 191–207. [Google Scholar] [CrossRef]
- Carey, S.W. The Tectonic Approach to Continental Drift; Geology Department Symposium University: Tasmania, Australia, 1956. [Google Scholar]
- Le Pichon, X. Sea floor spreading and continental drift. J. Geophys. Res. 1968, 73, 3661–3697. [Google Scholar] [CrossRef]
- Cox, A.; Hart, R.B. Plate Tectonics: How It Works; John Wiley & Sons: Hoboken, NJ, USA, 1986. [Google Scholar]
- Larson, K.M.; Freymueller, J.T.; Philipsen, S. Global plate velocities from the Global Positioning System. J. Geophys. Res. Solid Earth 1997, 102, 9961–9981. [Google Scholar] [CrossRef] [Green Version]
- Jade, S. Estimates of plate velocity and crustal deformation in the Indian subcontinent using GPS. Curr. Sci. 2004, 86, 1443–1448. [Google Scholar]
- Bettinelli, P.; Avouac, J.P.; Flouzat, M. Plate Motion of India and Interseismic Strain in the Nepal Himalaya from GPS and DORIS Measurements. J. Geod. 2006, 80, 567–589. [Google Scholar] [CrossRef]
- Bastos, L.; Bos, M.; Fernandes, R.M. Deformation and Tectonics: Contribution of GPS Measurements to Plate Tectonics-Overview and Recent Developments; Sciences of Geodesy—I: Advances and Future Directions; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Elliott, J.; Freymueller, J.T.; Larsen, C.F. Active tectonics of the St. Elias orogen, Alaska, observed with GPS measurements. J. Geophys. Res. Solid Earth 2013, 118, 5625–5642. [Google Scholar] [CrossRef]
- Van Gelder, B.H.; Aardoom, L. SLR Network Designs in View of Reliable Detection of Plate Kinematics in the East Mediterranean; Reports of the Department of Geodesy; Delft University of Technology: Delft, The Netherlands, 1982; pp. 1–24. [Google Scholar]
- Christodoulidis, D.C.; Smith, D.E.; Kolenkiewicz, R.; Klosko, S.M.; Torrence, M.H.; Dunn, P.J. Observing tectonic plate motions and deformations from satellite laser ranging. J. Geophys. Res. 1985, 90, 9249–9263. [Google Scholar] [CrossRef]
- Smith, D.E.; Kolenkiewicz, R.; Dunn, P.J.; Robbins, J.W.; Torrens, M.H.; Klosko, S.M.; Williamson, R.G.; Pavlis, E.C.; Douglas, N.B.; Fricke, S.K. Tectonic motion and deformation from Satellite Laser Ranging to LAGEOS. J. Geoph. Res. 1990, 95, 22013–22041. [Google Scholar] [CrossRef]
- Sengoku, A. A plate motion study using Ajisai SLR data. Earth Planets Space 1998, 50, 611–627. [Google Scholar] [CrossRef] [Green Version]
- Alothman, A.O.; Schillak, S. Recent Results for the Arabian Plate Motion Using Satellite Laser Ranging Observations of Riyadh SLR Station to LAGEOS-1 and LAGEOS-2 Satellites. Arab. J. Sci. Eng. 2014, 39, 217–226. [Google Scholar] [CrossRef]
- Atanasova, M.; Georgiev, I.; Chapanov, Y. Global Tectonic Plate Motions from Slr Data Processing; University of Architecture Civil Engineering and Geodesy: Sofia, Bulgaria, 2018; Volume 51, pp. 109–114. [Google Scholar]
- Crétaux, J.F.; Soudarin, L.; Cazenave, A.; Bouillé, F. Present-day tectonic plate motions and crustal deformations from the DORIS space system. J. Geophys. Res. Solid Earth 1998, 103, 30167–30181. [Google Scholar] [CrossRef]
- Soudarin, L.; Crétaux, J.F. A model of present-day tectonic plate motions from 12 years of DORIS measurements. J. Geod. 2006, 80, 609–624. [Google Scholar] [CrossRef]
- Kroger, P.M.; Lyzenga, G.A.; Walace, K.S.; Davidson, J.M. Tectonic motion in the western United States inferred from Very Long Baseline Interferometry measurements 1980–1986. J. Geoph. Res. 1987, 92, 14151–14153. [Google Scholar] [CrossRef]
- Sato, K. Tectonic plate motion and deformation inferred from very long baseline interferometry. Tectonophysics 1993, 220, 69–87. [Google Scholar] [CrossRef]
- Haas, R.; Gueguen, E.; Scherneck, H.G.; Nothnagel, A.; Campbell, J. Crustal motion results derived from observations in the European geodetic VLBI network. Earth Planets Space 2000, 52, 759–764. [Google Scholar] [CrossRef] [Green Version]
- Haas, R.; Nothnagel, A.; Campbell, J.; Gueguen, E. Recent crustal movements observed with the European VLBI network: Geodetic analysis and results. J. Geodyn. 2003, 35, 391–414. [Google Scholar] [CrossRef]
- Krásná, H.; Ros, T.; Pavetich, P.; Böhm, J.; Nilsson, T.; Schuh, H. Investigation of crustal motion in Europe by analysing the European VLBI sessions. Acta Geod. Geophys. 2013, 48, 389–404. [Google Scholar] [CrossRef]
- Kurt, O. Monitoring Movements of Tectonic Plates by Analyzing VLBI Data via QGIS. In Proceedings of the Scientific Congress of the Turkish National Union of Geodesy and Geophsysics (TNUGG-SC), Izmir, Turkey, 30 May–2 June 2018; pp. 198–201. [Google Scholar]
- Argus, D.F.; Gordon, R.G.; Heflin, M.B.; Eanes, R.J.; Willis, P.; Peltier, W.R.; Owen, S.E. The angular velocities of the plates and the velocity of Earth’s centre from space geodesy. Geophys. J. Int. 2010, 180, 913–960. [Google Scholar] [CrossRef]
- Le Pichon, X.; Angelier, J.; Sibuet, J.C. Plate boundaries and extensional tectonics. Tectonophysics 1982, 81, 239–256. [Google Scholar] [CrossRef]
- Sen, S. Earth: The Extraordinary Planet; Avant Publishing Services Pvt. Ltd.: Noida, Uttar Pradesh, India, 2018. [Google Scholar]
- Drewes, H. A geodetic approach for the recovery of global kinematic plate parameters. Bull. Géodésique 1982, 56, 70–79. [Google Scholar] [CrossRef]
- Drewes, H. Global Plate Motion Parameters Derived from Actual Space Geodetic Observations. In Proceedings of the International Association of Geodesy Symposia 101, Global and Regional Geodynamics, Edinburgh, UK, 3–5 August 1989. [Google Scholar]
- Altamimi, Z.; Rebischung, P.; Métivier, L.; Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. J. Geophys. Res. 2016, 121, 6109–6131. [Google Scholar] [CrossRef] [Green Version]
- Kraszewska, K.; Jagoda, M.; Rutkowska, M. Tectonic Plate Parameters Estimated in the International Terrestrial Reference Frame ITRF2008 Based on SLR Stations. Acta Geophys. 2016, 64, 1495–1512. [Google Scholar] [CrossRef] [Green Version]
- Jagoda, M.; Rutkowska, M.; Suchocki, C.; Katzer, J. Determination of the tectonic plates motion parameters based on SLR, DORIS and VLBI stations positions. J. Appl. Geod. 2020, 14, 121–131. [Google Scholar] [CrossRef]
- Kraszewska, K.; Jagoda, M.; Rutkowska, M. Tectonic plates parameters estimated in International Terrestrial Reference Frame ITRF2008 based on DORIS stations. Acta Geophys. 2018, 66, 509–521. [Google Scholar] [CrossRef] [Green Version]
- Jagoda, M.; Rutkowska, M. Use of VLBI measurement technique to determination of the tectonic plates motion parameters. Metrol. Meas. Syst. 2020, 27, 151–165. [Google Scholar]
- Schonenberg, R.; Neugebauer, J. Einfuhrung in Die Geologie Europas; Rombach Verlag: Freiburg im Breisgau, Germany, 1994. [Google Scholar]
- Parfenow, L.M.; Badarch, G.; Berzin, N.A.; Hwang, D.H.; Khanchuk, A.I.; Kuzmin, M.I.; Nokleberg, W.J.; Obolenskiy, A.A.; Ogasawara, M.; Prokopiev, A.V.; et al. Introduction to Region al Geology, Tectonics and Metallogenesis on North Coast Asia; United States Geological Survey: Reston, VA, USA, 2007.
- Rey, P.; Burg, J.P.; Casey, M. The Scandinavian Caledonides and Their Relationship to the Varisean Belt; Geological Society of London: London, UK, 1997. [Google Scholar]
- Moores, E.M.; Fairbridge, R.W. (Eds.) Encyclopedia of European and Asian Regional Geology; Chapman & Hall: London, UK; New York, NY, USA; Tokyo, Japan; Melbourne, Australia; Madras, India, 1997. [Google Scholar]
- Yin, A.; Harrison, M. (Eds.) The Tectonic Evolution of Asia; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Molnar, P.; Tapponier, P. Cenozoic tectonics of Asia: Effects of continental collision. Science 1975, 189, 419–426. [Google Scholar] [CrossRef] [PubMed]
- Auboutin, J. Some aspects of the tectonics of subduction zones. Tectonophysics 1989, 160, 1–21. [Google Scholar] [CrossRef]
- McCann, T. The Geology of Central Europe: Precambrian and Paleozoik; Geological Society of London: London, UK, 2008. [Google Scholar]
- Drewes, H. The actual plate kinematic and crustal deformation model APKIM2005 as basis for a non-rotating ITRF. In Proceedings of the International Association of Geodesy Symposia 134, Berlin/Heidelberg, Germany, 9–14 October 2009; pp. 95–101. [Google Scholar]






| No. | Name of the Station and Geodetic Position | [°] | [°] | [°/Ma] |
|---|---|---|---|---|
| 30 (scenario 1 - final solution) | 54.87 ± 0.47 | 261.02 ± 0.50 | 0.2585 ± 0.0026 | |
| 31 | 30 (from scenario 1) + Bilibino (BILI), B = 67°, L = 166° | 53.06 ± 0.47 | 259.60 ± 0.51 | 0.2500 ± 0.0026 |
| 31 | 30 (from scenario 1) + Magadan (MAGO), B = 59°, L = 150° | 53.66 ± 0.56 | 259.71 ± 0.57 | 0.2505 ± 0.0030 |
| 31 | 30 (from scenario 1) + Petropavlovsk (PETP), B = 52°, L = 158° | 50.41 ± 1.48 | 254.19 ± 1.34 | 0.2335 ± 0.0066 |
| 31 | 30 (from scenario 1) + Teheran (TEHN), B = 35°, L = 51° | 55.11 ± 0.83 | 261.40 ± 0.77 | 0.2551 ± 0.0038 |
| 31 | 30 (from scenario 1) + Kunming (KUNM), B = 24°, L = 102° | 54.03 ± 0.65 | 260.04 ± 0.68 | 0.2502 ± 0.0036 |
| 31 | 30 (from scenario 1) + Lhasa (LHAS), B = 29°, L = 91° | 57.63 ± 0.98 | 265.05 ± 1.17 | 0.2666 ± 0.0062 |
| 31 | 30 (from scenario 1) + Mizusawa (MIZU), B = 38°, L = 141° | 50.20 ± 1.84 | 254.67 ± 1.67 | 0.2334 ± 0.0082 |
| 31 | 30 (from scenario 1) + Koganei (KGNI), B = 35°, L = 139° | 52.23 ± 1.32 | 257.04 ± 1.39 | 0.2330 ± 0.0069 |
| 31 | 30 (from scenario 1) + Usuda (USUD), B = 35°, L = 138° | 52.30 ± 1.27 | 257.10 ± 1.24 | 0.2336 ± 0.0062 |
| 31 | 30 (from scenario 1) + Tsukuba (TSKB), B = 35°, L=140° | 51.39 ± 1.44 | 256.25 ± 1.37 | 0.2333 ± 0.0068 |
| 31 | 30 (from scenario 1) + Abashiri (P202), B = 44°, L = 144° | 52.42 ± 1.26 | 256.35 ± 1.22 | 0.2340 ± 0.0057 |
| No. | Solution | [°] | [°] | [°/Ma] |
|---|---|---|---|---|
| 1 | APKIM2005 model [45] | 53.4 ± 0.4 | 264.3 ± 0.5 | 0.259 ± 0.001 |
| 2 | Larson et al. [8] | 56.3 | 257.2 | 0.26 |
| 3 | Solution given in this paper (based on 120 GNSS station positions) | 54.81 ± 0.37 | 261.04 ± 0.48 | 0.2585 ± 0.0025 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jagoda, M.; Rutkowska, M. An Analysis of the Eurasian Tectonic Plate Motion Parameters Based on GNSS Stations Positions in ITRF2014. Sensors 2020, 20, 6065. https://doi.org/10.3390/s20216065
Jagoda M, Rutkowska M. An Analysis of the Eurasian Tectonic Plate Motion Parameters Based on GNSS Stations Positions in ITRF2014. Sensors. 2020; 20(21):6065. https://doi.org/10.3390/s20216065
Chicago/Turabian StyleJagoda, Marcin, and Miłosława Rutkowska. 2020. "An Analysis of the Eurasian Tectonic Plate Motion Parameters Based on GNSS Stations Positions in ITRF2014" Sensors 20, no. 21: 6065. https://doi.org/10.3390/s20216065
APA StyleJagoda, M., & Rutkowska, M. (2020). An Analysis of the Eurasian Tectonic Plate Motion Parameters Based on GNSS Stations Positions in ITRF2014. Sensors, 20(21), 6065. https://doi.org/10.3390/s20216065