A Body Tracking-Based Low-Cost Solution for Monitoring Workers’ Hygiene Best Practices during Pandemics

 ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 

Abstract
:1. Introduction
The Risk of Pandemics
- Environment decontamination based on periodic sanitation and ventilation and the use of specific air conditioning filters;
- Use of Personal Protection Equipment (PPE) such as gloves, masks, face shields, and gowns (Figure 2);
- Strict compliance with Behavioral Protection Practices (hereinafter BPPs), both in interpersonal relationships and at the workplace. BPPs provide for: avoiding crowding conditions, maintaining at least a 1-m distance between individuals, using PPE correctly, frequently washing hands, and avoiding hand–face contacts [23].
2. Materials and Methods
2.1. System Requirements
- Avoiding hand contacts with the perioral and periocular areas;
- Maintaining an interpersonal distance of at least 1 m.
- Monitoring people’s behavior in the application scenarios for providing proactive feedback;
- Collecting behavioral data for statistical reports;
- Studying the relative importance of direct inhalation of droplets and hand-mediated contamination for better understanding the virus contagion pathways.
- Be transparent to the users (that is, not hindering working activities);
- Be easy to set up in the workplace;
- Allow 3D body-part tracking (i.e., hands, eyes, ears, and nose);
- Allow a reliable real-time hand–face contact detection;
- Distinguish between hand–face contact areas;
- Generate real-time hand–face contact warnings;
- Monitoring the distance between people;
- Log the hand–face contact events for further behavioral studies and eventual task-execution procedure redesign.
2.2. The HealthSHIELD Tool
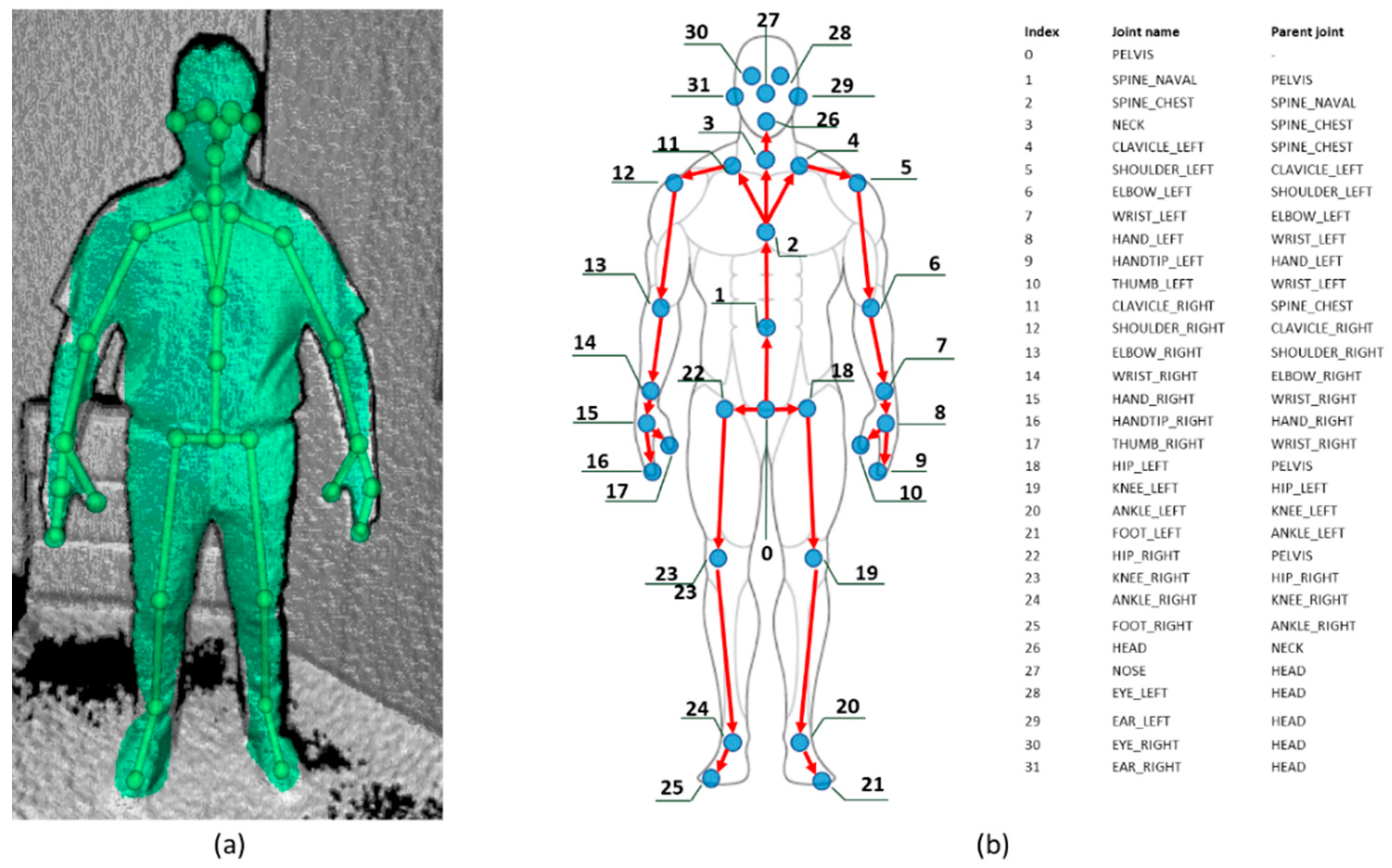
2.2.1. The Data Retrieval Module
2.2.2. The Gesture Detection Module
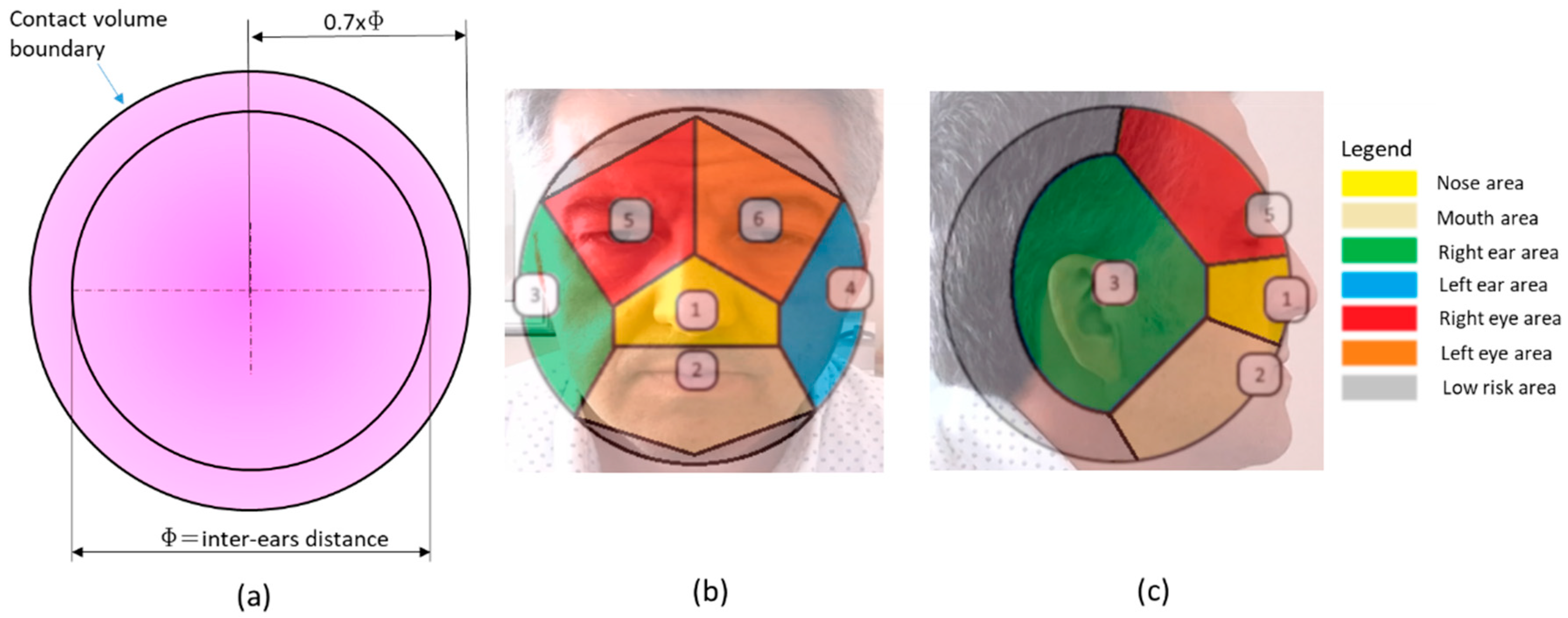
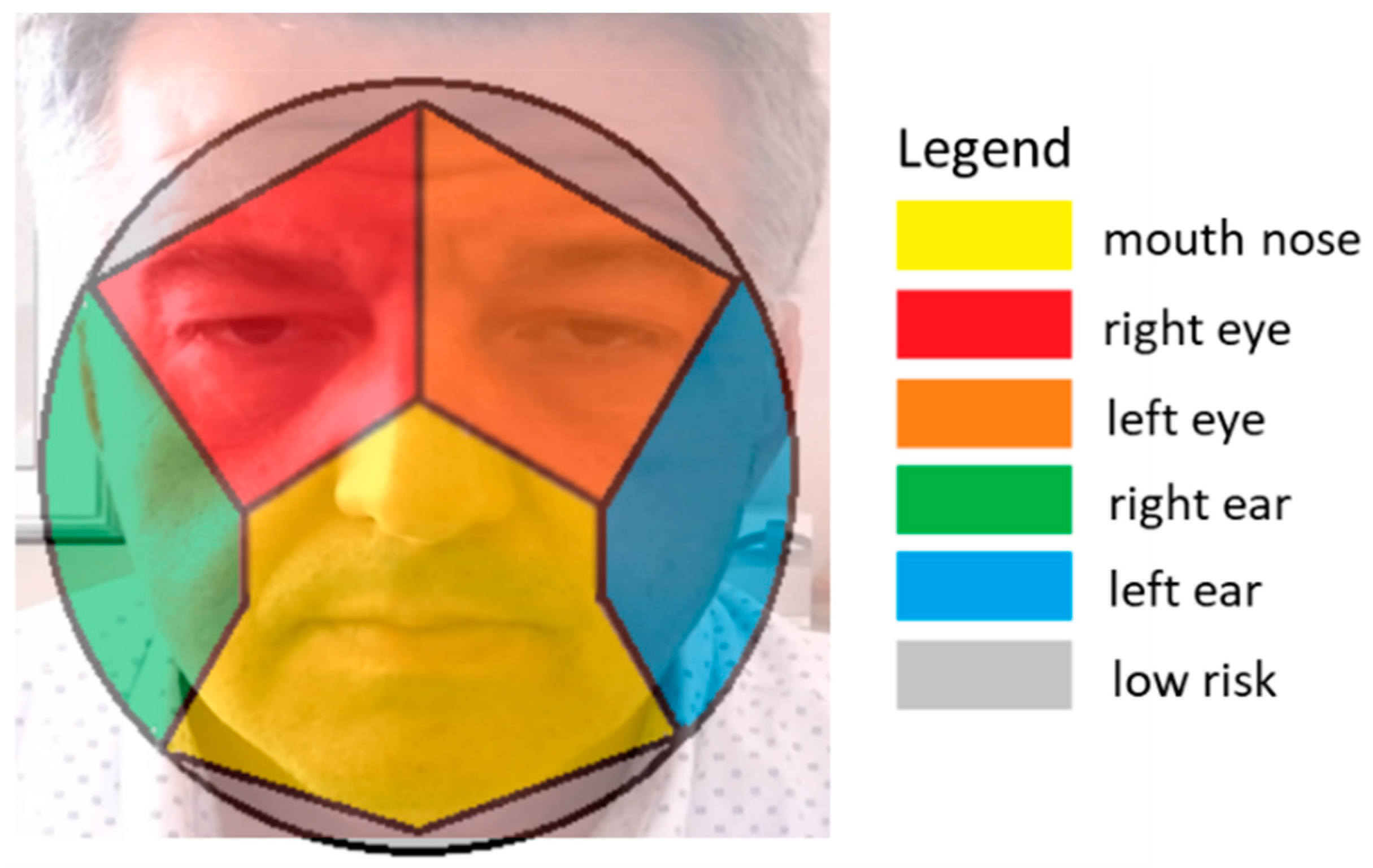
2.2.3. The Attitude Monitor Module
2.3. Validation Procedure
2.3.1. Experimental Setup
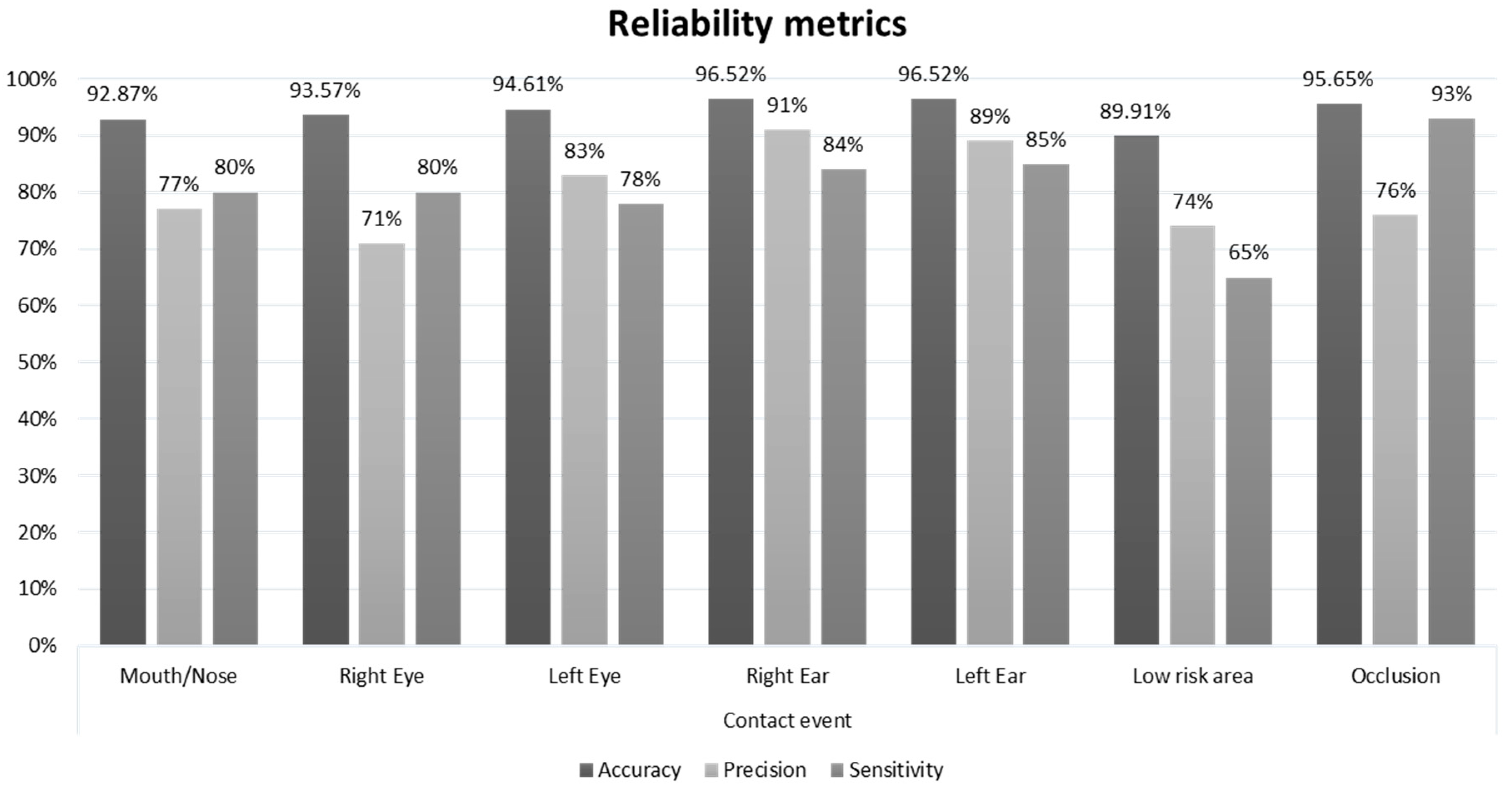
2.3.2. Data Analysis and Metrics
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
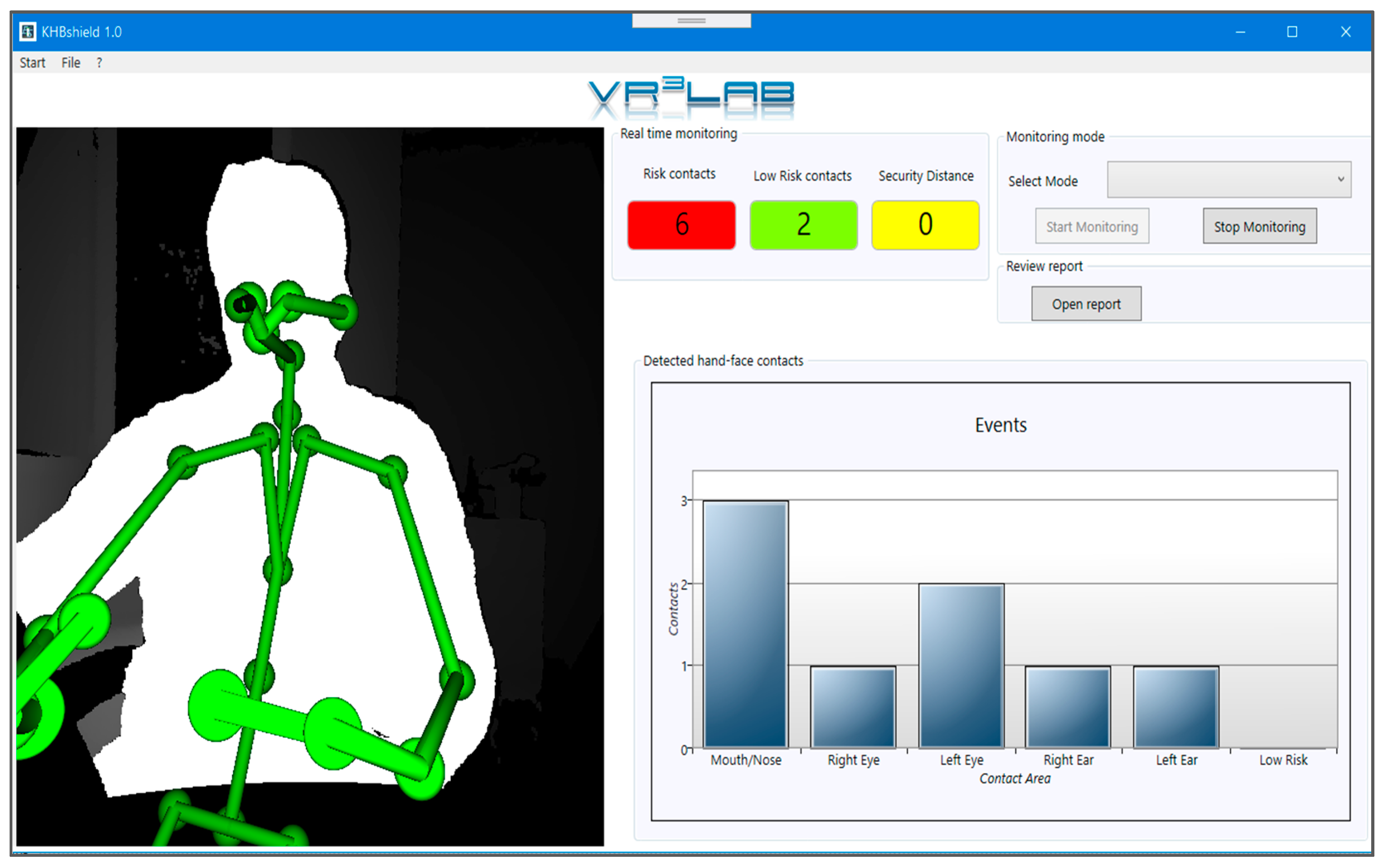
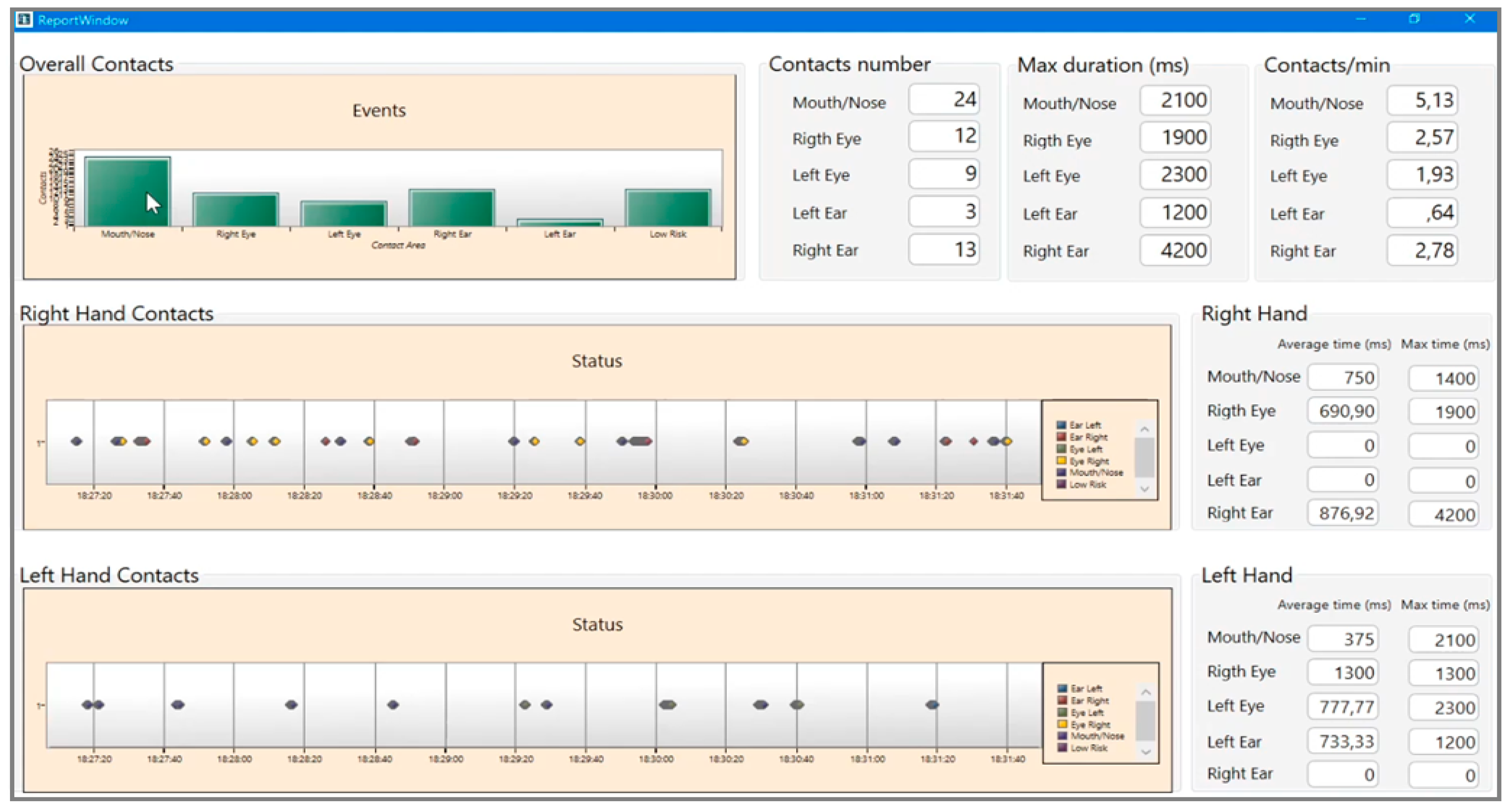
Appendix A. The HealthSHIELD GUI


References
- WHO. Available online: https://www.who.int/emergencies/diseases/novel-coronavirus-2019/technical-guidance/naming-the-coronavirus-disease-(covid-2019)-and-the-virus-that-causes-it (accessed on 4 June 2020).
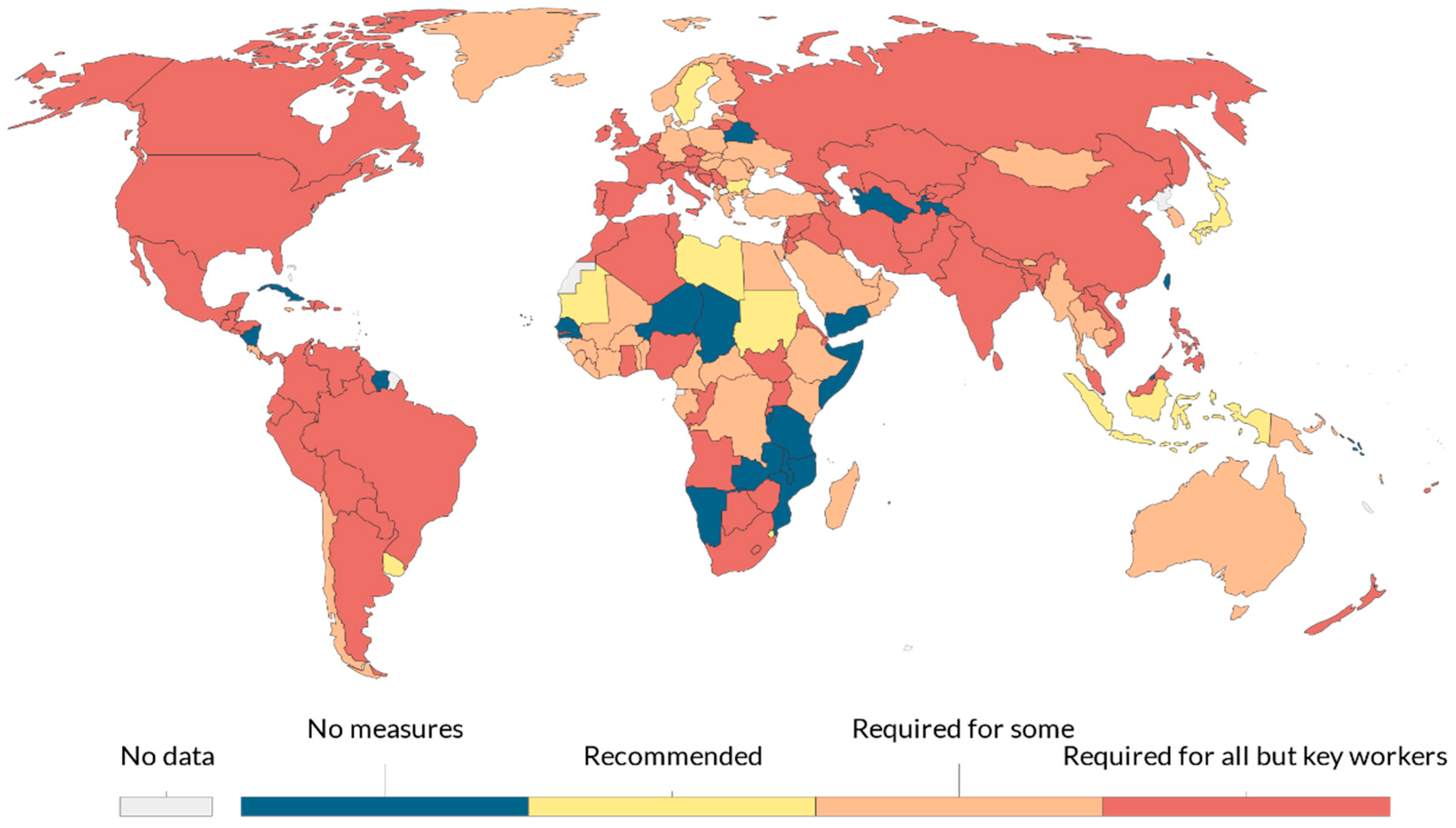
- Thomas, H.; Sam, W.; Anna, P.; Toby, P.; Beatriz, K. Oxford COVID-19 Government Response Tracker, B.S. of G. Our World in Data. 2020. Available online: https://ourworldindata.org/grapher/workplace-closures-covid?time=2020-04-02 (accessed on 21 September 2020).
- Fernandes, N. Economic Effects of Coronavirus Outbreak (COVID-19) on the World Economy. SSRN Electron. J. 2020. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Y.; Ye, D.; Liu, Q. A review of the 2019 Novel Coronavirus (COVID-19) based on current evidence. Int. J. Antimicrob. Agents 2020, 55, 105948. [Google Scholar] [CrossRef] [PubMed]
- Prompetchara, E.; Ketloy, C.; Palaga, T. Immune responses in COVID-19 and potential vaccines: Lessons learned from SARS and MERS epidemic. Asian Pac. J. Allergy Immunol. 2020, 38, 1–9. [Google Scholar] [PubMed]
- Semple, S.; Cherrie, J.W. Covid-19: Protecting Worker Health. Ann. Work Expo. Health 2020, 64, 461–464. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Basic Protective Measures against the New Coronavirus. Available online: https://www.acbf-pact.org/media/news/basic-protective-measures-against-new-coronavirus (accessed on 13 April 2020).
- Davies, S.E.; Kamradt-Scott, A.; Rushton, S. Disease Diplomacy: International Norms and Global Health Security; Johns Hopkins University Press: Baltimore, MD, USA, 2015; ISBN 9781421416496. [Google Scholar]
- Wu, J.T.; Leung, K.; Leung, G.M. Nowcasting and forecasting the potential domestic and international spread of the 2019-nCoV outbreak originating in Wuhan, China: A modelling study. Lancet 2020, 395, 689–697. [Google Scholar] [CrossRef] [Green Version]
- Bogoch, I.I.; Watts, A.; Thomas-Bachli, A.; Huber, C.; Kraemer, M.U.G.; Khan, K. Potential for global spread of a novel coronavirus from China. J. Travel Med. 2020, 27, taaa011. [Google Scholar] [CrossRef] [PubMed]
- COVID-19 Coronavirus Pandemic. Available online: https://www.worldometers.info/coronavirus/ (accessed on 9 April 2020).
- Johns Hopkins University of Medicine—Coronavirus Resource Center. Available online: https://coronavirus.jhu.edu/map.html (accessed on 21 September 2020).
- Chatterjee, A.; Gerdes, M.W.; Martinez, S.G. Statistical explorations and univariate timeseries analysis on covid-19 datasets to understand the trend of disease spreading and death. Sensors 2020, 20, 3089. [Google Scholar] [CrossRef] [PubMed]
- Ozturk, T.; Talo, M.; Yildirim, E.A.; Baloglu, U.B.; Yildirim, O.; Rajendra Acharya, U. Automated detection of COVID-19 cases using deep neural networks with X-ray images. Comput. Biol. Med. 2020, 121, 103792. [Google Scholar] [CrossRef] [PubMed]
- Ting, D.S.W.; Carin, L.; Dzau, V.; Wong, T.Y. Digital technology and COVID-19. Nat. Med. 2020, 26, 459–461. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, X.; Coffee, M.; Bari, A.; Wang, J.; Jiang, X.; Huang, J.; Shi, J.; Dai, J.; Cai, J.; Zhang, T.; et al. Towards an Artificial Intelligence Framework for Data-Driven Prediction of Coronavirus Clinical Severity. Comput. Mater. Contin. 2020, 63, 537–551. [Google Scholar] [CrossRef]
- Yip, C.C.-Y.; Ho, C.-C.; Chan, J.F.-W.; To, K.K.-W.; Chan, H.S.-Y.; Wong, S.C.-Y.; Leung, K.-H.; Fung, A.Y.-F.; Ng, A.C.-K.; Zou, Z.; et al. Development of a Novel, Genome Subtraction-Derived, SARS-CoV-2-Specific COVID-19-nsp2 Real-Time RT-PCR Assay and Its Evaluation Using Clinical Specimens. Int. J. Mol. Sci. 2020, 21, 2574. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Robson, B. COVID-19 Coronavirus spike protein analysis for synthetic vaccines, a peptidomimetic antagonist, and therapeutic drugs, and analysis of a proposed achilles’ heel conserved region to minimize probability of escape mutations and drug resistance. Comput. Biol. Med. 2020, 121, 103749. [Google Scholar] [CrossRef] [PubMed]
- Robson, B. Computers and viral diseases. Preliminary bioinformatics studies on the design of a synthetic vaccine and a preventative peptidomimetic antagonist against the SARS-CoV-2 (2019-nCoV, COVID-19) coronavirus. Comput. Biol. Med. 2020, 119, 103670. [Google Scholar] [CrossRef] [PubMed]
- Mavrikou, S.; Moschopoulou, G.; Tsekouras, V.; Kintzios, S. Development of a portable, ultra-rapid and ultra-sensitive cell-based biosensor for the direct detection of the SARS-COV-2 S1 spike protein antigen. Sensors 2020, 20, 3121. [Google Scholar] [CrossRef]
- Gov.sg WhatsApp Subscription. Available online: https://www.form.gov.sg/#!/5e33fa3709f80b00113b6891 (accessed on 9 April 2020).
- World Health Organization (WHO) Coronavirus Disease (COVID-19) Advice for the Public. Available online: https://www.who.int/emergencies/diseases/novel-coronavirus-2019/advice-for-public (accessed on 15 May 2020).
- World Health Organization (WHO). Rational Use of Personal Protective Equipment for Coronavirus Disease 2019 (COVID-19). Available online: https://www.who.int/publications/i/item/rational-use-of-personal-protective-equipment-for-coronavirus-disease-(covid-19)-and-considerations-during-severe-shortages (accessed on 10 May 2020).
- ABRFID Companies Unite Against COVID-19. Available online: https://www.rfidjournal.com/abrfid-companies-unite-against-covid-19 (accessed on 9 April 2020).
- D’Aurizio, N.; Baldi, T.L.; Paolocci, G.; Prattichizzo, D. Preventing Undesired Face-Touches with Wearable Devices and Haptic Feedback. IEEE Access 2020, 8, 139033–139043. [Google Scholar] [CrossRef]
- Yang, L.; Liao, R.; Lin, J.; Sun, B.; Wang, Z.; Keogh, P.; Zhu, J. Enhanced 6D measurement by integrating an Inertial Measurement Unit (IMU) with a 6D sensor unit of a laser tracker. Opt. Lasers Eng. 2020, 126, 105902. [Google Scholar] [CrossRef]
- Schall, M.C.; Sesek, R.F.; Cavuoto, L.A. Barriers to the Adoption of Wearable Sensors in the Workplace: A Survey of Occupational Safety and Health Professionals. Hum. Factors 2018, 60, 351–362. [Google Scholar] [CrossRef]
- Kowalski, K.; Rhodes, R.; Naylor, P.-J.; Tuokko, H.; MacDonald, S. Direct and indirect measurement of physical activity in older adults: A systematic review of the literature. Int. J. Behav. Nutr. Phys. Act. 2012, 9, 148. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; McGorry, R.W.; Chou, L.-S.; Lin, J.; Chang, C. Accuracy of the Microsoft Kinect ® for measuring gait parameters during treadmill walking. Gait Posture 2015, 42, 145–151. [Google Scholar] [CrossRef] [Green Version]
- O’Hara, K.; Morrison, C.; Sellen, A.; Bianchi-Berthouze, N.; Craig, C. Body Tracking in Healthcare. Synth. Lect. Assist. Rehabil. Health Technol. 2016, 5, 1–151. [Google Scholar] [CrossRef]
- Manghisi, V.M.; Uva, A.E.; Fiorentino, M.; Gattullo, M.; Boccaccio, A.; Evangelista, A. Automatic Ergonomic Postural Risk Monitoring on the factory shopfloor—The ErgoSentinel Tool. Procedia Manuf. 2019, 42, 97–103. [Google Scholar] [CrossRef]
- Mahmoud, M.; Baltrušaitis, T.; Robinson, P. Automatic analysis of naturalistic hand-over-face gestures. ACM Trans. Interact. Intell. Syst. 2016, 6, 1–18. [Google Scholar] [CrossRef]
- González-Ortega, D.; Díaz-Pernas, F.J.; Martínez-Zarzuela, M.; Antón-Rodríguez, M.; Díez-Higuera, J.F.; Boto-Giralda, D. Real-time hands, face and facial features detection and tracking: Application to cognitive rehabilitation tests monitoring. J. Netw. Comput. Appl. 2010, 33, 447–466. [Google Scholar] [CrossRef]
- Naik, N.; Mehta, M.A. Hand-over-Face Gesture based Facial Emotion Recognition using Deep Learning. Proceeding of the 2018 International Conference on Circuits and Systems in Digital Enterprise Technology, Kottayam, India, 21–22 December 2018; pp. 1–7. [Google Scholar] [CrossRef]
- DO NOT TOUCH YOUR FACE. Available online: https://donottouchyourface.com/ (accessed on 9 April 2020).
- Manghisi, V.M.; Uva, A.E.; Fiorentino, M.; Gattullo, M.; Boccaccio, A.; Monno, G. Enhancing user engagement through the user centric design of a mid-air gesture-based interface for the navigation of virtual-tours in cultural heritage expositions. J. Cult. Herit. 2018, 32, 186–197. [Google Scholar] [CrossRef]
- Uva, A.E.; Fiorentino, M.; Manghisi, V.M.; Boccaccio, A.; Debernardis, S.; Gattullo, M.; Monno, G. A User-Centered Framework for Designing Midair Gesture Interfaces. IEEE Trans. Human-Mach. Syst. 2019, 49, 421–429. [Google Scholar] [CrossRef]
- Guerra, M.S.D.R.; Martin-Gutierrez, J. Evaluation of full-body gestures performed by individuals with down syndrome: Proposal for designing user interfaces for all based on kinect sensor. Sensors 2020, 20, 3903. [Google Scholar] [CrossRef]
- Zhang, M.; Shi, R.; Yang, Z. A critical review of vision-based occupational health and safety monitoring of construction site workers. Saf. Sci. 2020, 126, 104658. [Google Scholar] [CrossRef]
- Manghisi, V.M.; Uva, A.E.; Fiorentino, M.; Bevilacqua, V.; Trotta, G.F.; Monno, G. Real time RULA assessment using Kinect v2 sensor. Appl. Ergon. 2017, 65, 481–491. [Google Scholar] [CrossRef]
- Reyes, M.; Clapés, A.; Ramírez, J.; Revilla, J.R.; Escalera, S. Automatic digital biometry analysis based on depth maps. Comput. Ind. 2013, 64, 1316–1325. [Google Scholar] [CrossRef]
- Liao, Y.; Vakanski, A.; Xian, M.; Paul, D.; Baker, R. A review of computational approaches for evaluation of rehabilitation exercises. Comput. Biol. Med. 2020, 119, 103687. [Google Scholar] [CrossRef] [Green Version]
- Abraham, L.; Bromberg, F.; Forradellas, R. Ensemble of shape functions and support vector machines for the estimation of discrete arm muscle activation from external biceps 3D point clouds. Comput. Biol. Med. 2018, 95, 129–139. [Google Scholar] [CrossRef] [PubMed]
- Vitali, A.; Regazzoni, D.; Rizzi, C. Digital motion acquisition to assess spinal cord injured (SCI) patients. Comput. Aided. Des. Appl. 2019, 16, 962–971. [Google Scholar] [CrossRef]
- Liu, C.H.; Lee, P.; Chen, Y.L.; Yen, C.W.; Yu, C.W. Study of postural stability features by using kinect depth sensors to assess body joint coordination patterns. Sensors 2020, 20, 1291. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Loeb, H.; Kim, J.; Arbogast, K.; Kuo, J.; Koppel, S.; Cross, S.; Charlton, J. Automated recognition of rear seat occupants’ head position using KinectTM 3D point cloud. J. Safety Res. 2017, 63, 135–143. [Google Scholar] [CrossRef] [PubMed]
- Microsoft Azure Kinect DK. Available online: https://docs.microsoft.com/en-us/azure/Kinect-dk/hardware-specification (accessed on 28 May 2020).
- Xu, X.; McGorry, R.W. The validity of the first and second generation Microsoft Kinect® for identifying joint center locations during static postures. Appl. Ergon. 2015, 49, 47–54. [Google Scholar] [CrossRef] [PubMed]
- Kurillo, G.; Chen, A.; Bajcsy, R.; Han, J.J. Evaluation of upper extremity reachable workspace using Kinect camera. Technol. Health Care Off. J. Eur. Soc. Eng. Med. 2012, 21, 641–656. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Plantard, P.; Shum, H.; Le Pierres, A.-S.; Multon, F. Validation of an ergonomic assessment method using Kinect data in real workplace conditions. Appl. Ergon. 2017, 65, 562–569. [Google Scholar] [CrossRef]
- Microsoft Azure-Kinect-Sensor-SDK. Available online: https://microsoft.github.io/Azure-Kinect-Sensor-SDK/master/index.html (accessed on 28 May 2020).
- Microsoft Azure Kinect Body-SDK. Available online: https://docs.microsoft.com/en-us/azure/kinect-dk/body-sdk-download (accessed on 28 May 2020).
- K4AdotNet. Available online: https://www.nuget.org/packages/K4AdotNet/1.4.1 (accessed on 5 June 2020).
- WPFToolkit 3.5.50211.1. Available online: https://www.nuget.org/packages/WPFToolkit/3.5.50211.1# (accessed on 5 June 2020).
- OpenGL.Net 0.8.4. Available online: https://www.nuget.org/packages/OpenGL.Net/ (accessed on 5 June 2020).
- NASA Man-Systems Integration Standards, Volume I, Section 3, Anthropometry and Biomechanics. Available online: https://msis.jsc.nasa.gov/sections/section03.htm (accessed on 20 September 2020).
- Erwig, M. The graph Voronoi diagram with applications. Networks 2000, 36, 156–163. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [Green Version]
- Boenzi, F.; Digiesi, S.; Facchini, F.; Mummolo, G. Ergonomic improvement through job rotations in repetitive manual tasks in case of limited specialization and differentiated ergonomic requirements. IFAC Pap. 2016, 49, 1667–1672. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Truth Data | |||||||
|---|---|---|---|---|---|---|---|
| Mouth Nose | Right Eye | Left Eye | Right Ear | Left Ear | Low Risk Area | Occlusions | |
| Mouth/Nose | 74 | 7 | 14 | 0 | 0 | 1 | 0 |
| Right Eye | 12 | 55 | 1 | 9 | 0 | 1 | 0 |
| Left Eye | 7 | 0 | 64 | 0 | 5 | 1 | 0 |
| Right Ear | 0 | 1 | 0 | 69 | 0 | 6 | 0 |
| Left Ear | 0 | 1 | 1 | 0 | 68 | 6 | 0 |
| Low risk | 0 | 5 | 2 | 4 | 7 | 64 | 5 |
| Occlusions | 0 | 0 | 0 | 0 | 0 | 20 | 65 |
| Truth Data | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Classifier Results | Mouth Nose | Right Eye | Left Eye | Right Ear | Left Ear | Low Risk | Occlusions | ||
| Risk Contacts | Low-Risk Contacts | ||||||||
| Mouth/Nose | Risk contacts | 234 | 17 | 0 | |||||
| Right Eye | |||||||||
| Left Eye | |||||||||
| Right Ear | Low-risk contacts | 10 | 224 | 5 | |||||
| Left Ear | |||||||||
| Low risk | |||||||||
| Occlusions | 0 | 20 | 65 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manghisi, V.M.; Fiorentino, M.; Boccaccio, A.; Gattullo, M.; Cascella, G.L.; Toschi, N.; Pietroiusti, A.; Uva, A.E. A Body Tracking-Based Low-Cost Solution for Monitoring Workers’ Hygiene Best Practices during Pandemics. Sensors 2020, 20, 6149. https://doi.org/10.3390/s20216149
Manghisi VM, Fiorentino M, Boccaccio A, Gattullo M, Cascella GL, Toschi N, Pietroiusti A, Uva AE. A Body Tracking-Based Low-Cost Solution for Monitoring Workers’ Hygiene Best Practices during Pandemics. Sensors. 2020; 20(21):6149. https://doi.org/10.3390/s20216149
Chicago/Turabian StyleManghisi, Vito M., Michele Fiorentino, Antonio Boccaccio, Michele Gattullo, Giuseppe L. Cascella, Nicola Toschi, Antonio Pietroiusti, and Antonio E. Uva. 2020. "A Body Tracking-Based Low-Cost Solution for Monitoring Workers’ Hygiene Best Practices during Pandemics" Sensors 20, no. 21: 6149. https://doi.org/10.3390/s20216149
APA StyleManghisi, V. M., Fiorentino, M., Boccaccio, A., Gattullo, M., Cascella, G. L., Toschi, N., Pietroiusti, A., & Uva, A. E. (2020). A Body Tracking-Based Low-Cost Solution for Monitoring Workers’ Hygiene Best Practices during Pandemics. Sensors, 20(21), 6149. https://doi.org/10.3390/s20216149