1. Introduction
Over the past few years, satellite navigation technology has achieved rapid development, but there are still some problems to be solved in some aspects. For example, in terms of reliability and integrity, a single navigation system is difficult to meet the requirements of positioning accuracy in some areas with complex terrain due to insufficient visible satellites [
1]. In addition, in some applications with high dynamic requirements, the dynamic positioning of satellite navigation is not good enough to meet the needs of practical applications. Therefore, to improve navigation positioning accuracy and performance, the integration of GPS and BDS can be used, which will increase the number of visible stars; enhance the quality of observation; reduce the spatial position accuracy factor; improve the integrity, reliability and stability of the satellite navigation system; improve the ability of satellite navigation system positioning services and the positioning accuracy of the integrated positioning system; and expand the application field of satellite navigation [
2].
Many methods can be used to achieve the positioning of integrated BDS/GPS, such as real-time kinematic (RTK), precision point positioning (PPP) and SPP. RTK is a technique that uses the carrier phase in the satellite signal as the observation and uses the difference equation to solve the ambiguity to achieve the dynamic positioning between the mobile station and the reference station [
3]. At present, the static positioning accuracy of RTK technology can reach even centimeters or even millimeters [
4]. However, due to the dependence of RTK technology on carrier signals, it is susceptible to signal spoofing, interference and occlusion. PPP is a solution to solving the position using precise ephemeris, precise satellite orbit and precision satellite clock and dual-frequency carrier phase observations [
5,
6]. It can be divided into non-differential PPP and differential PPP according to the data processing [
7,
8,
9]. The current PPP positioning accuracy can reach decimeter or even centimeter level [
10]. However, the shortcoming of PPP is that the initialization time and re-initialization time after the satellite loses lock is very long, and the precision ephemeris can only be processed afterwards, so its scope of use is limited. SPP is a technique for determining the absolute coordinates of the receiver in Earth’s coordinate system based on satellite broadcast ephemeris and observations from a single receiver [
11,
12]. Due to the above shortcomings of RTK and PPP, if the positioning accuracy of SPP can be improved, it would be more suitable for use in vehicle applications.
There are many error sources in the positioning process [
13,
14,
15]. In the positioning process, various errors are roughly divided into the following three aspects according to different sources: (a) Satellite-related errors, which mainly include satellite clock errors and ephemeris errors, are due to the fact that they are affected by various complex factors, making it difficult to accurately match the operational model to the correction model and orbital parameters. (b) There are errors related to signal propagation. The influence of various substances in the atmosphere that satellite signals must pass through the atmosphere is called atmospheric delay. Atmospheric delays generally include ionospheric delays and tropospheric delays. (c) Receiver-related errors mainly include multi-path effects, electromagnetic interference, receiver noise, and software calculation errors. To achieve precise positioning, a correction model of the positioning error must be established to correct the positioning accuracy and minimize the effects of errors.
Different methods have been proposed by many researchers to reduce positioning errors. Ke Han et al. proposed a wavelet packet algorithm based on two-dimensional moving weighted average processing (WP-TD) for extracting multipath [
16]. Hailiang Xiong et al. presented a novel hybrid GPS/INS/Doppler velocity log (DVL) positioning method and a new robust adaptive federated strong tracking Kalman filter (RAFSTKF) algorithm for data fusion [
17]. An improved robust adaptive Kalman filtering algorithm was proposed by Qieqie Zhang et al., which includes a classification robust equivalent weight function model based on t-test statistic [
18]. Most of them focus only on reducing the error of one or several sources, but not reducing the error of multiple sources.
Recently, deep learning has become one of the most active technologies in many research areas. Deep learning usually refers to stacking multiple layers of neural network to perform machine learning tasks [
19], which can provide a different level of abstraction to improve the learning ability and task performance [
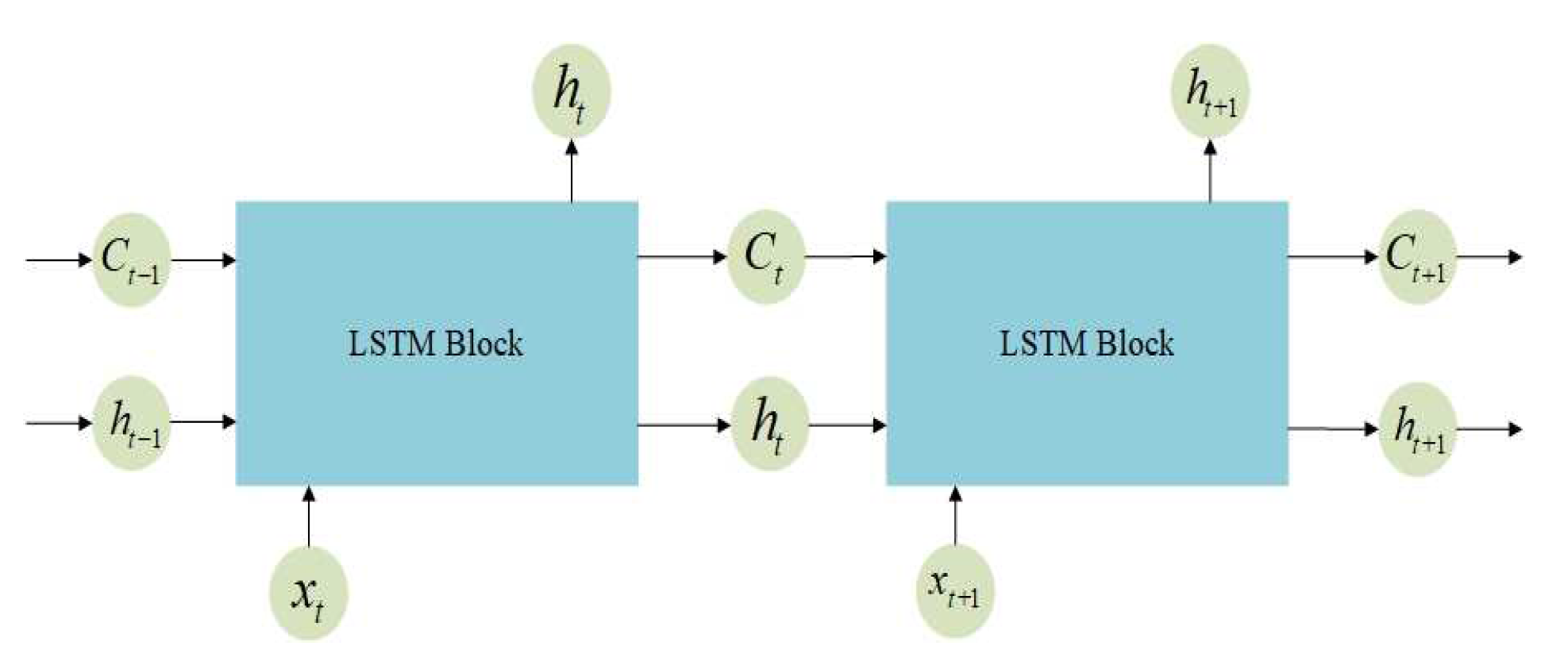
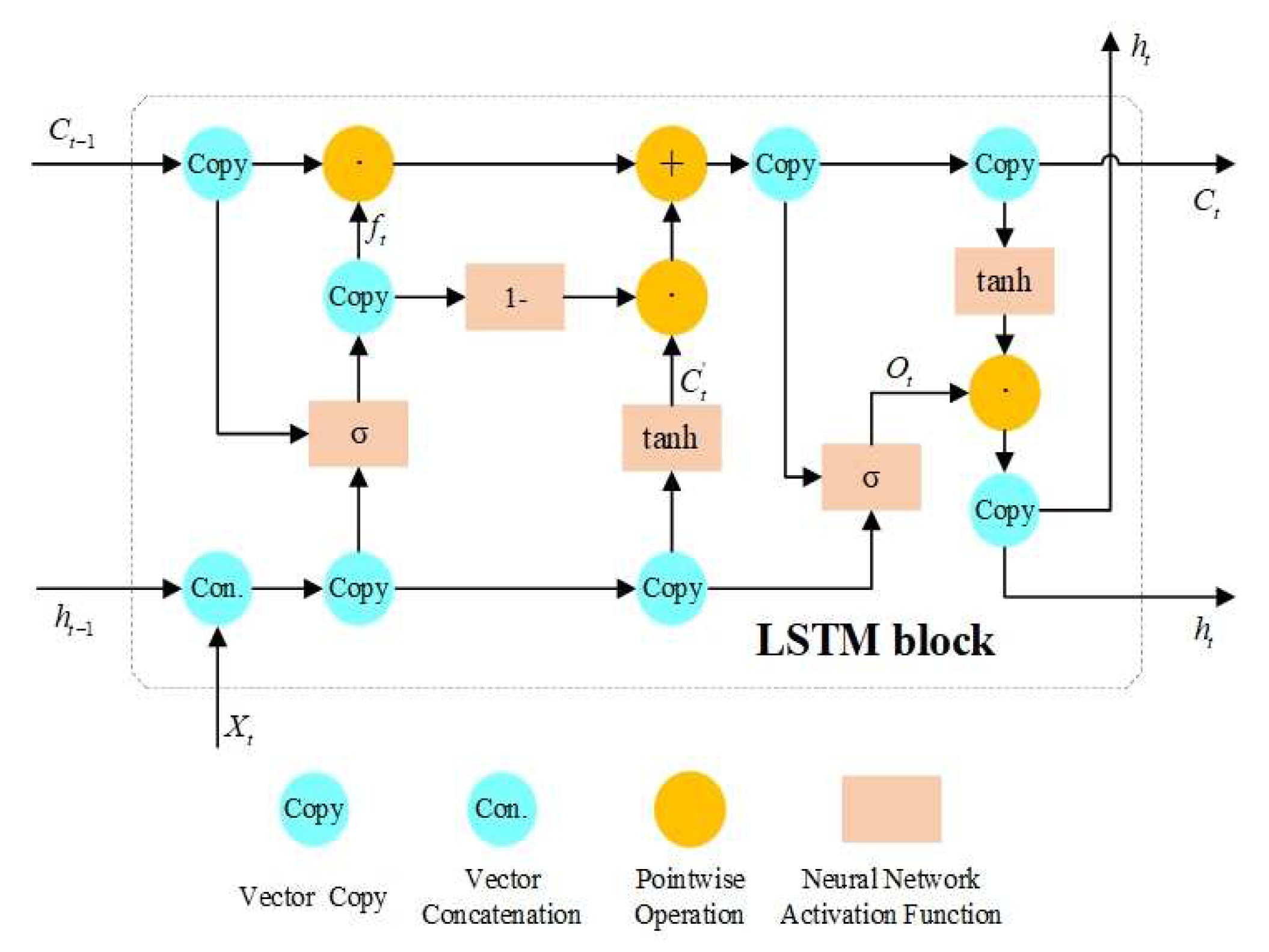
20]. Recurrent neural network (RNN) with Long Short-Term Memory (LSTM), which was originally introduced by Hochreiter et al. [
21], has emerged as an effective and scalable model for several learning problems related to sequential data [
22,
23,
24,
25]. Since the SPP solution process is also a sequential data problem, the LSTM network can be used to reduce the error caused by multiple sources, including satellite clock error, ephemeris error, ionosphere and tropospheric delays, multi-path effect and the receiver error.
In this paper, a novel standard point positioning approach to integrate BDS/GPS (all GNSS systems would be applicable), which uses the learning method to predict the multi-source error as a whole, is proposed to reduce the multiple sources errors. The contributions of this paper can be summarized as follows:
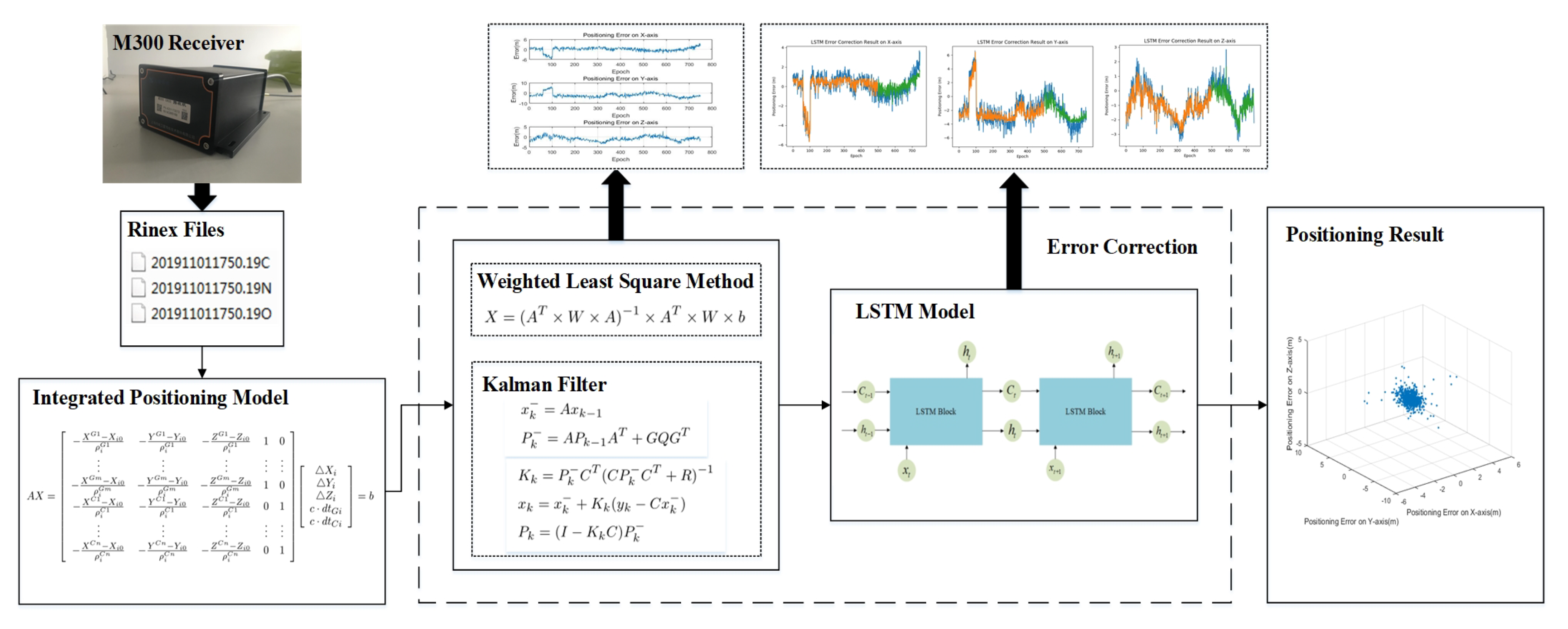
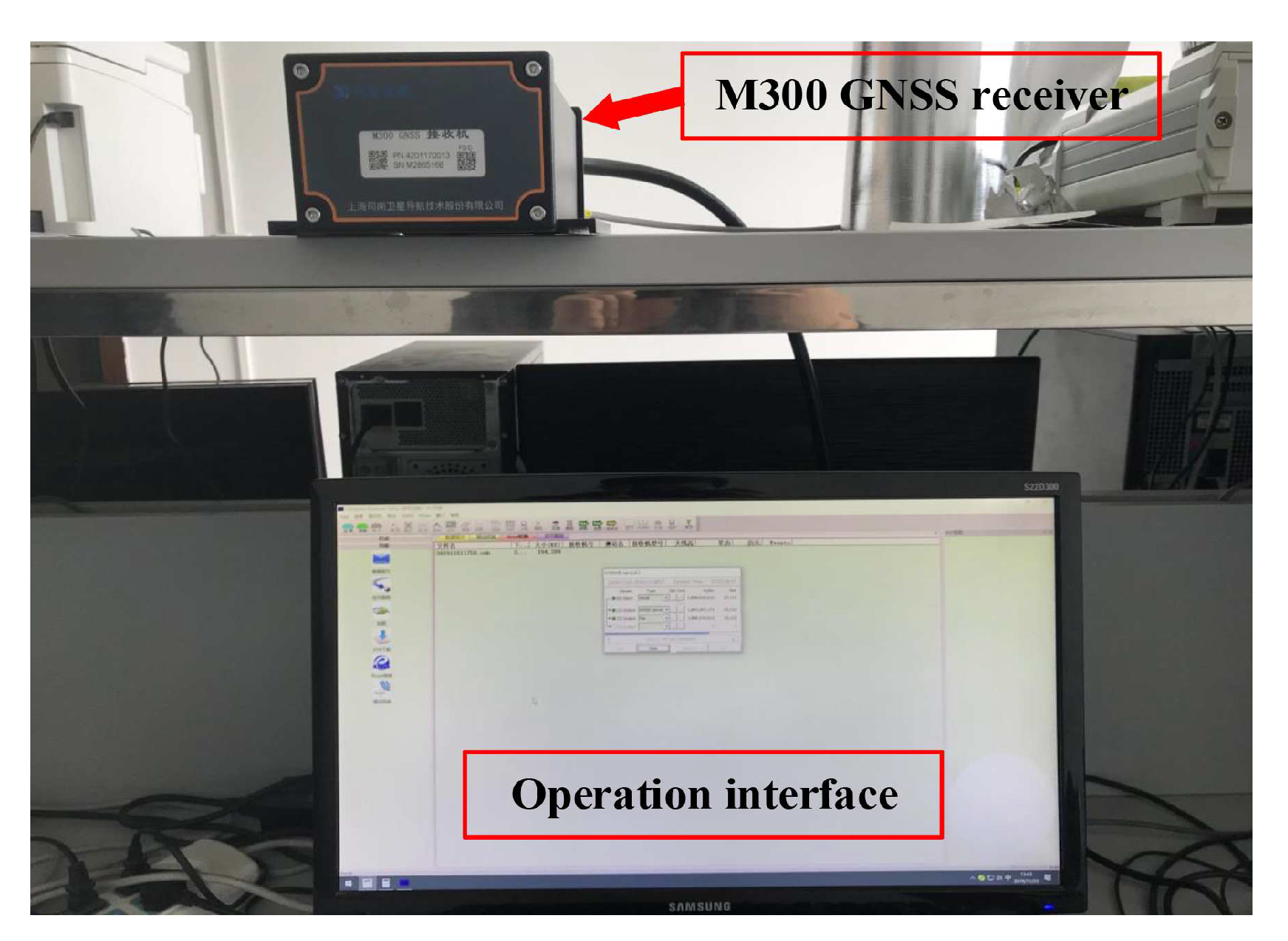
The SPP calculation model of Integrated BDS/GPS is implemented based on the BDS/GPS original ephemeris file and observation file data, which are collected through Sinan M300 GNSS receiver.
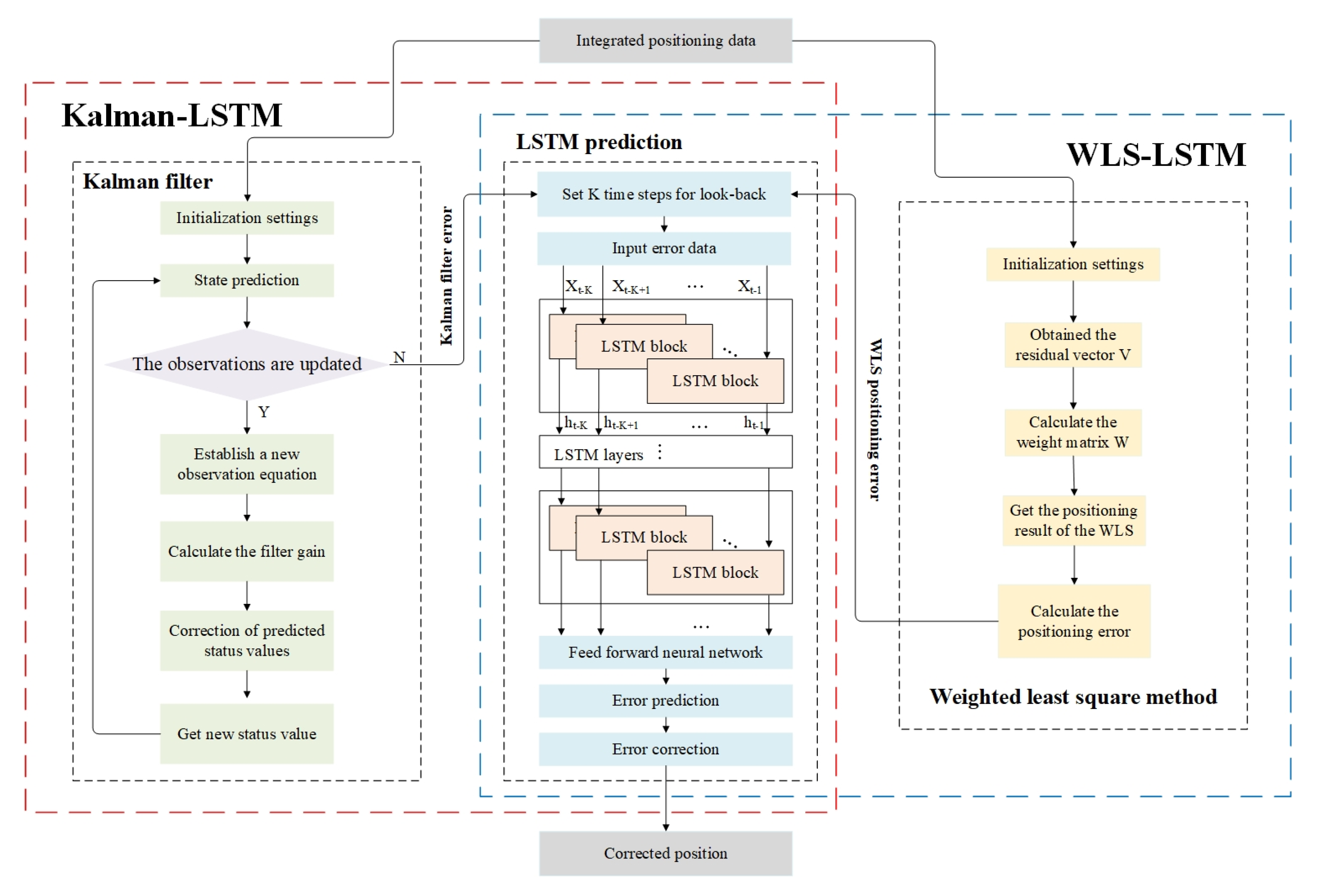
The LSTM-based error correction method is proposed and implemented combined with the traditional filtering method to reduce the multiple sources errors, in which the LSTM recurrent neural network is used to predict the positioning error of the next epoch, so as to reduce the positioning error at the receiving end.
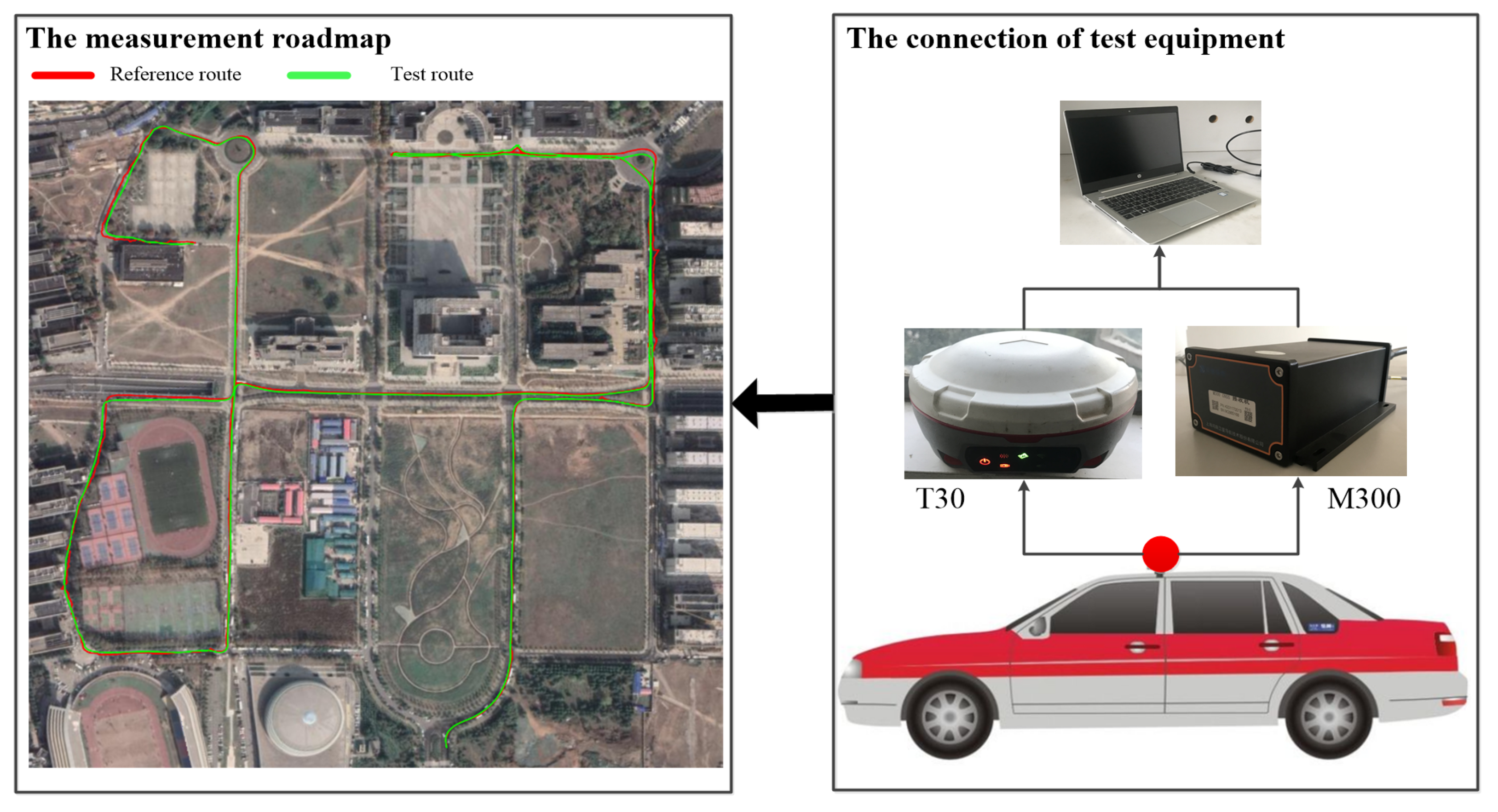
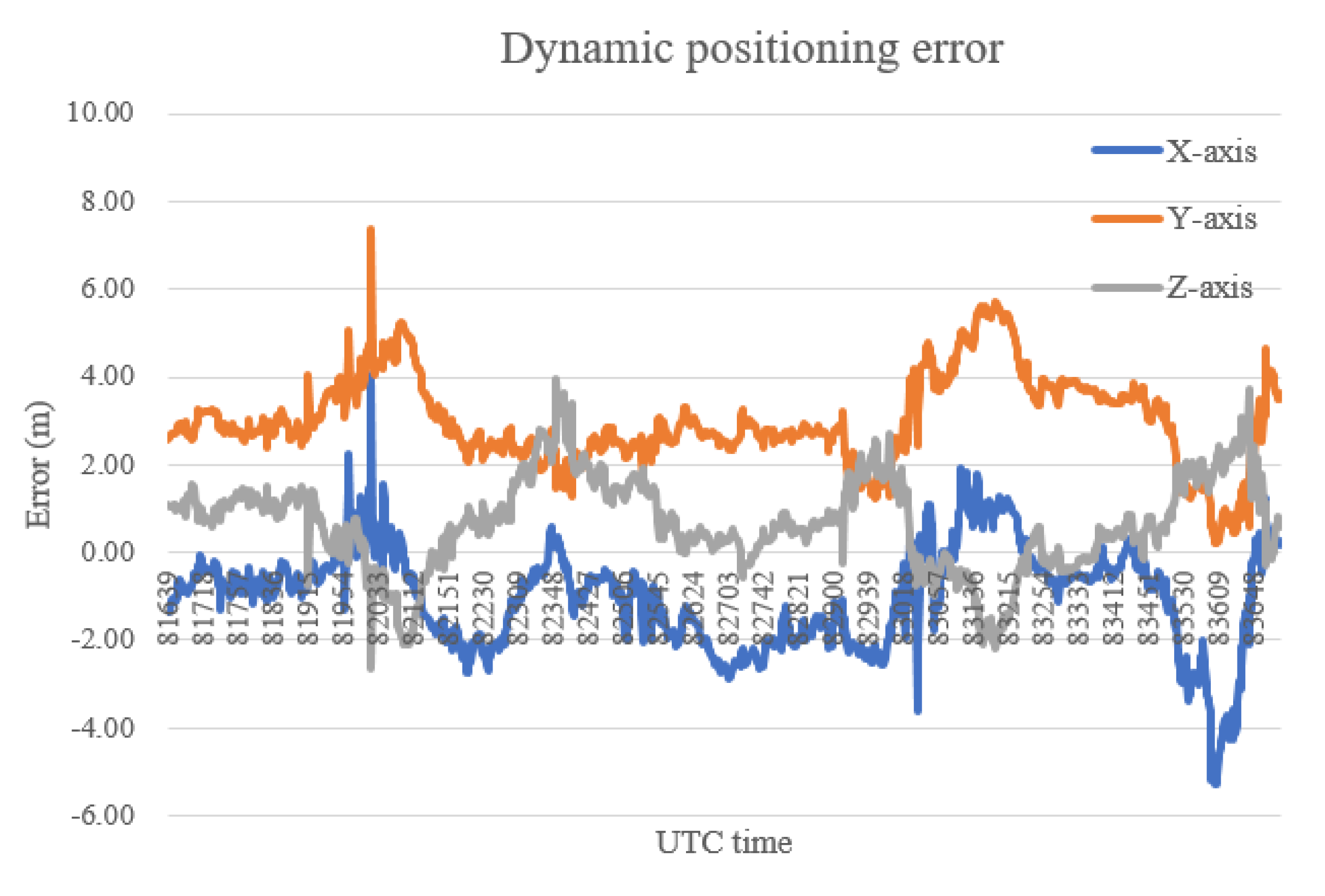
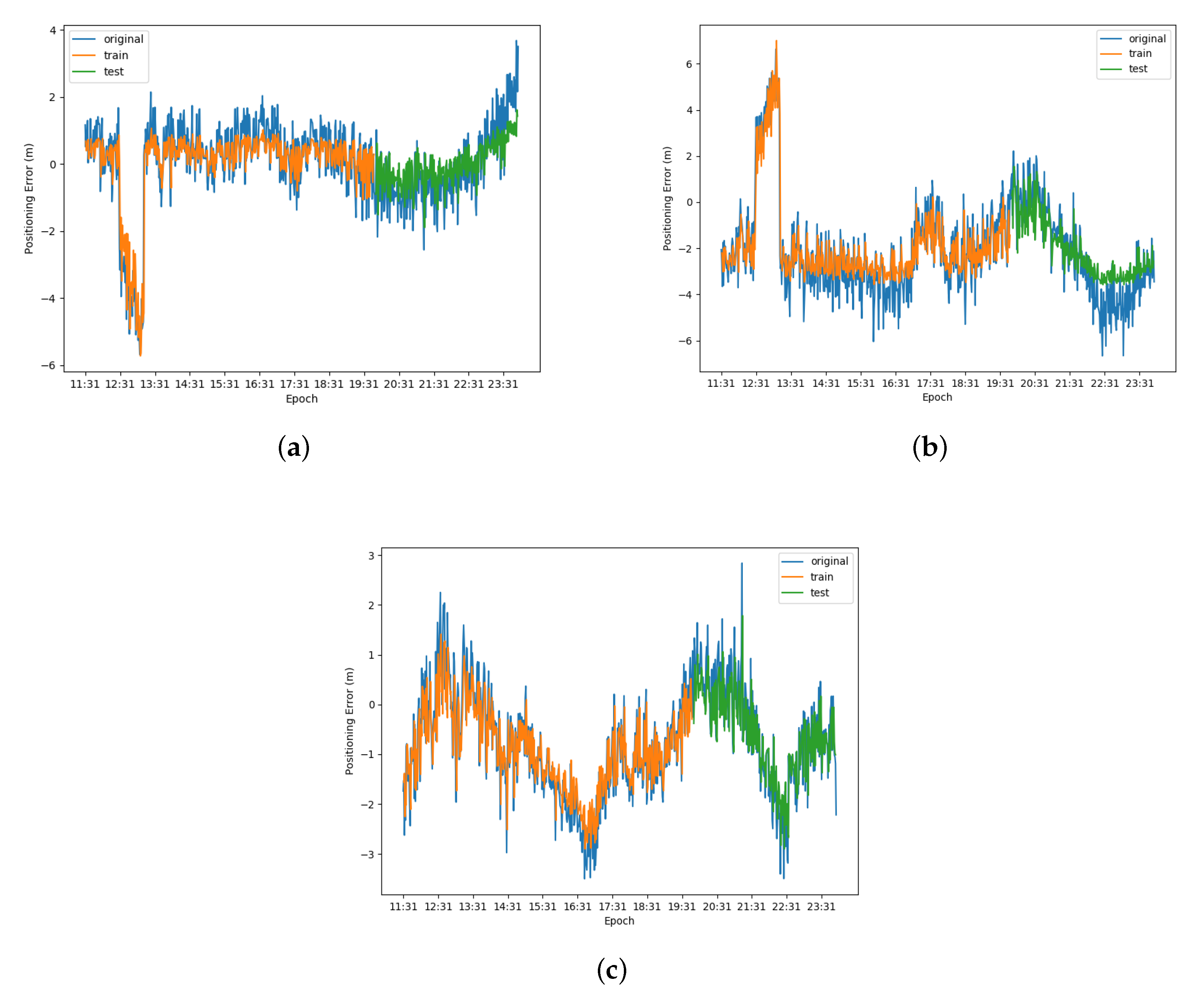
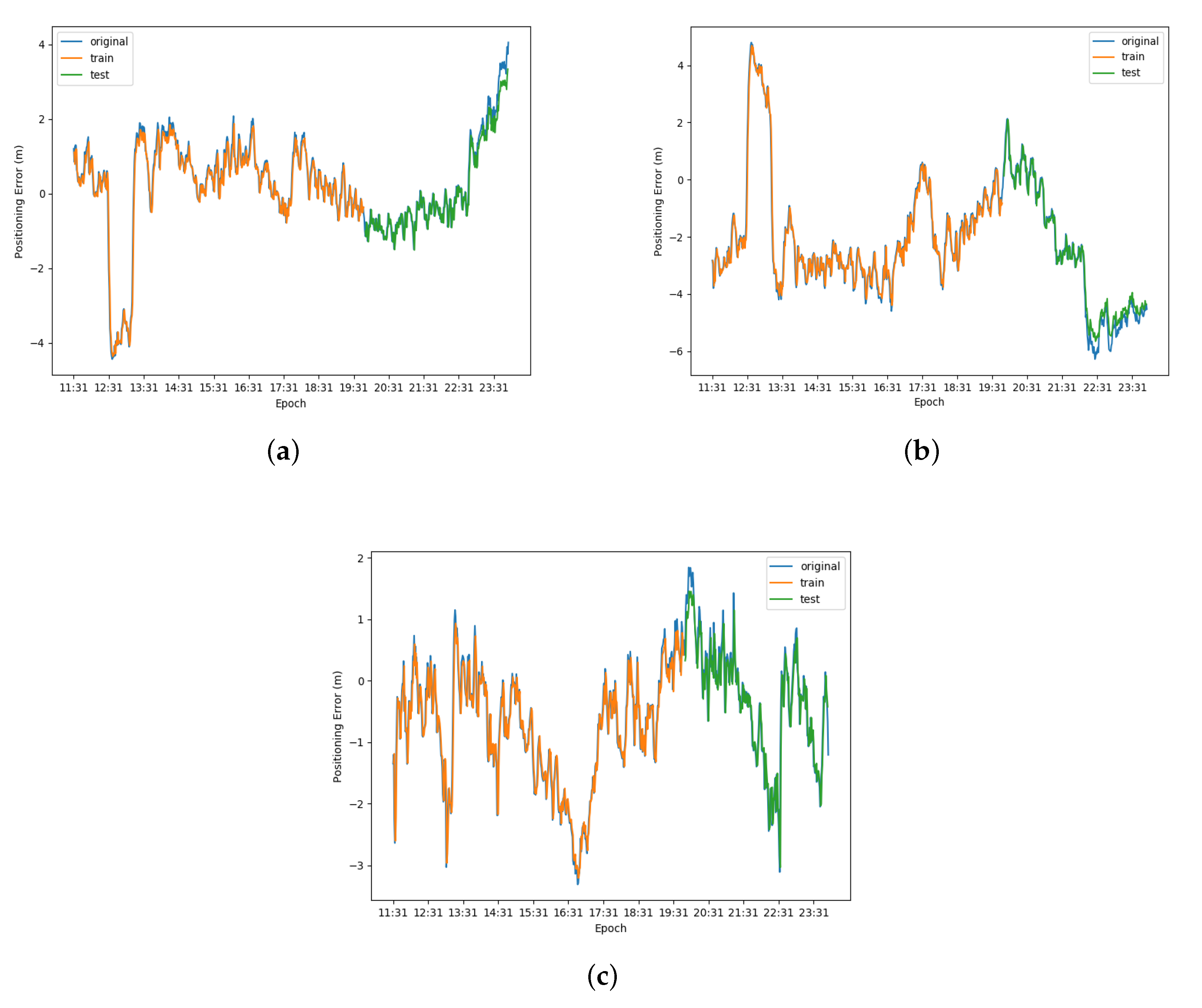
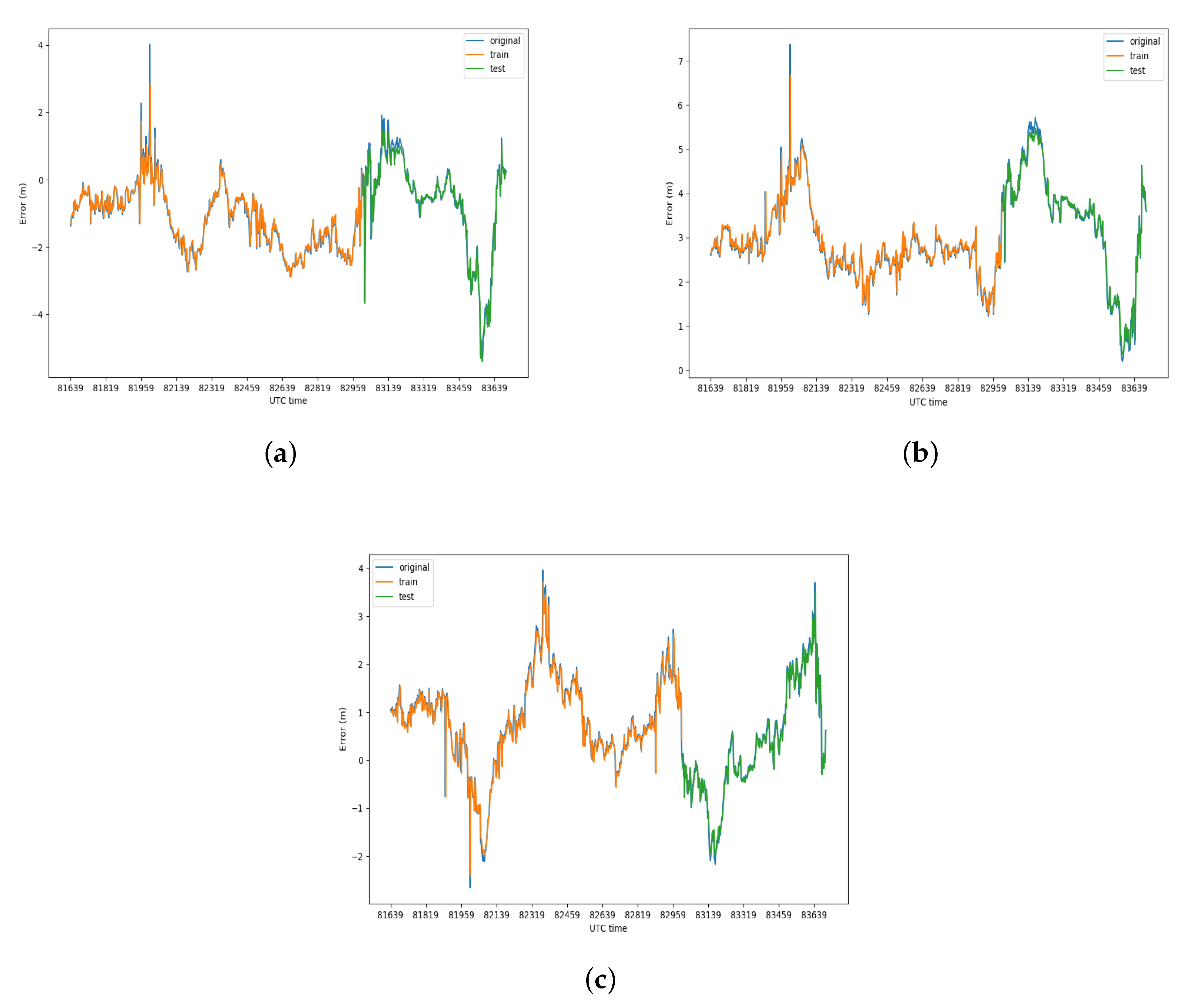
Experiments in static and dynamic scenarios were conducted on the data collected by Sinan M300 GNSS receiver and the result of proposed approach was compared with the traditional positioning methods, which proved that the proposed approach can improve the standard point positioning performance of integrated BDS/GPS significantly.
The rest of the paper is organized as follows. In
Section 2, the method of standard point positioning of integrated BDS/GPS is described. The LSTM-based error correction method is detailed in
Section 3.
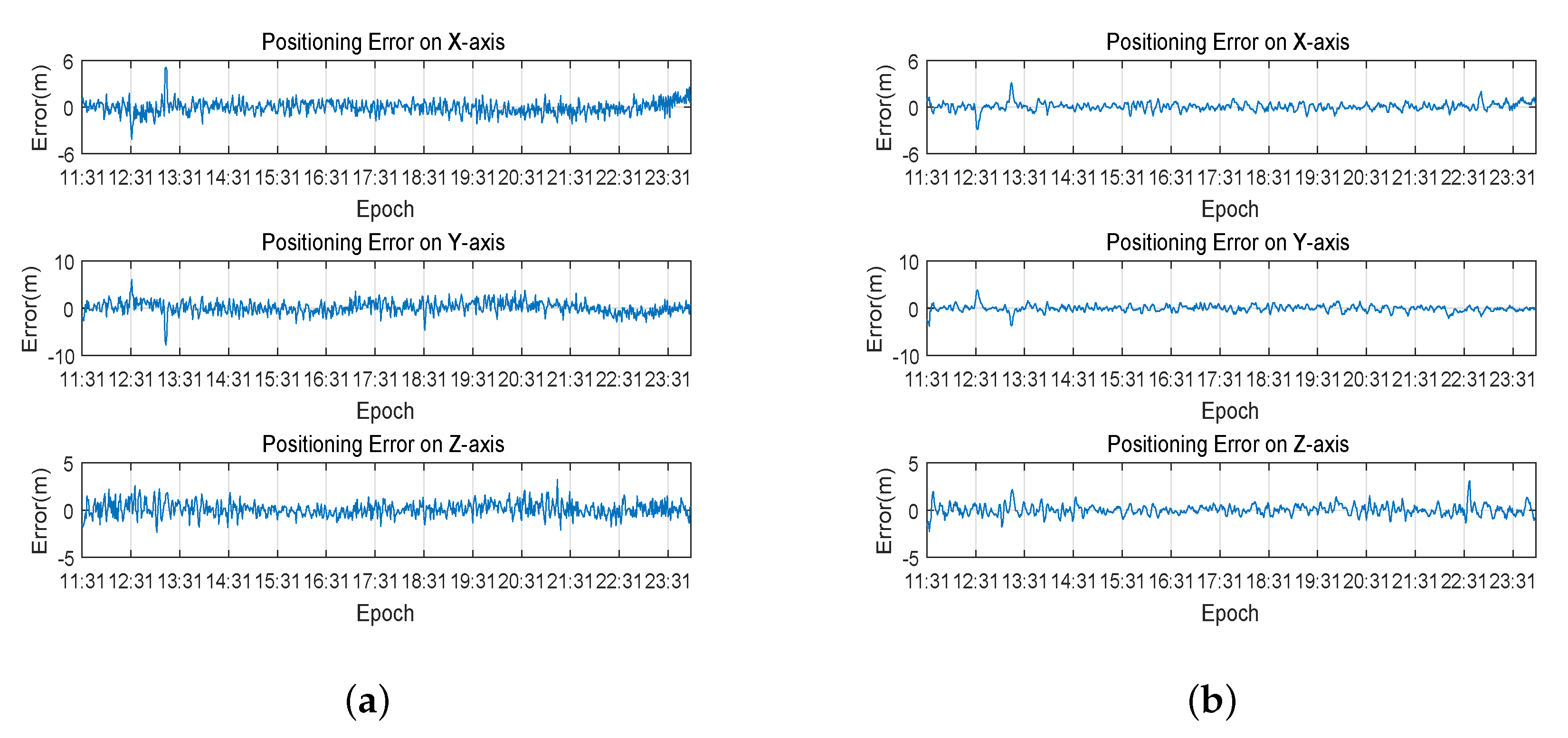
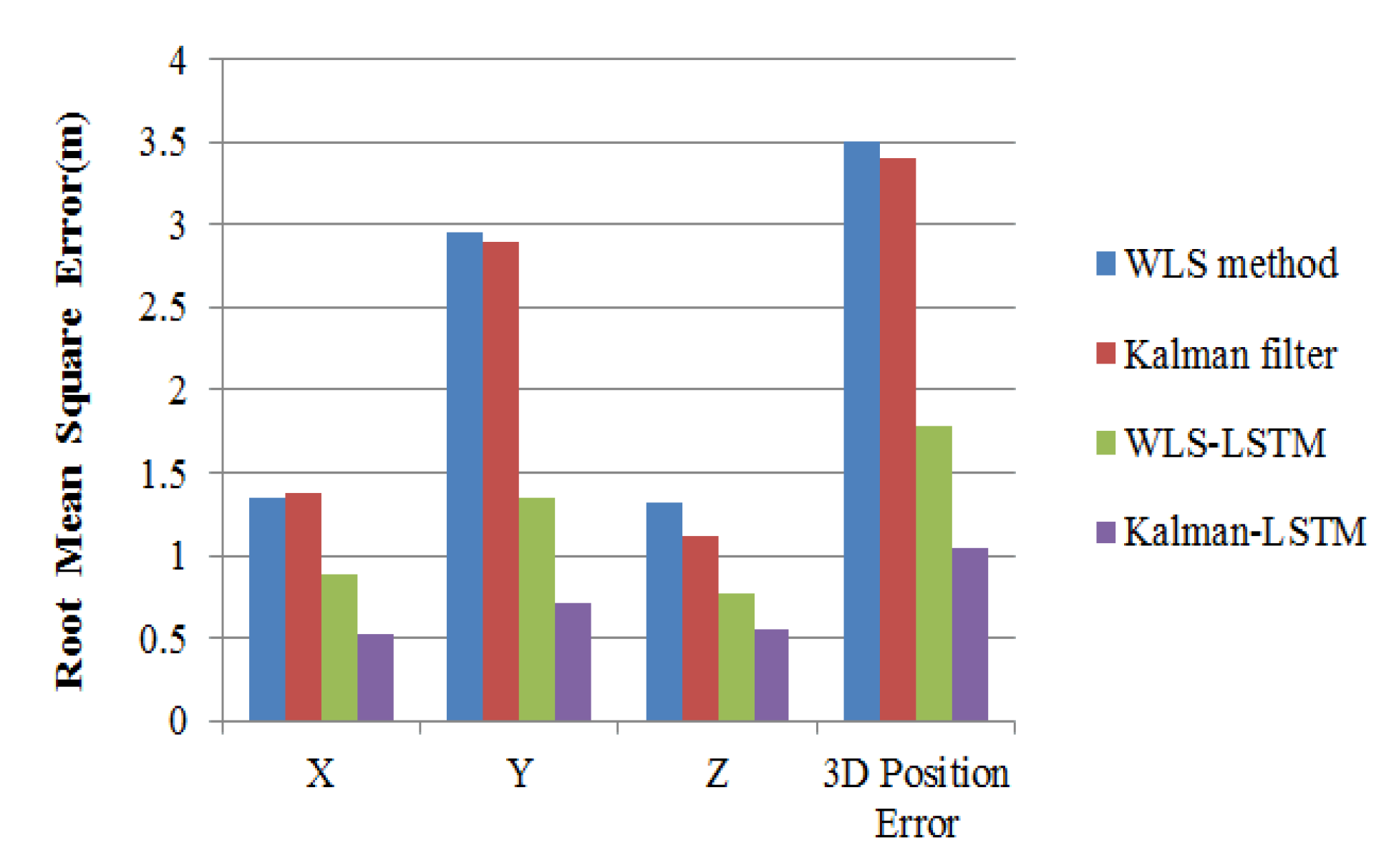
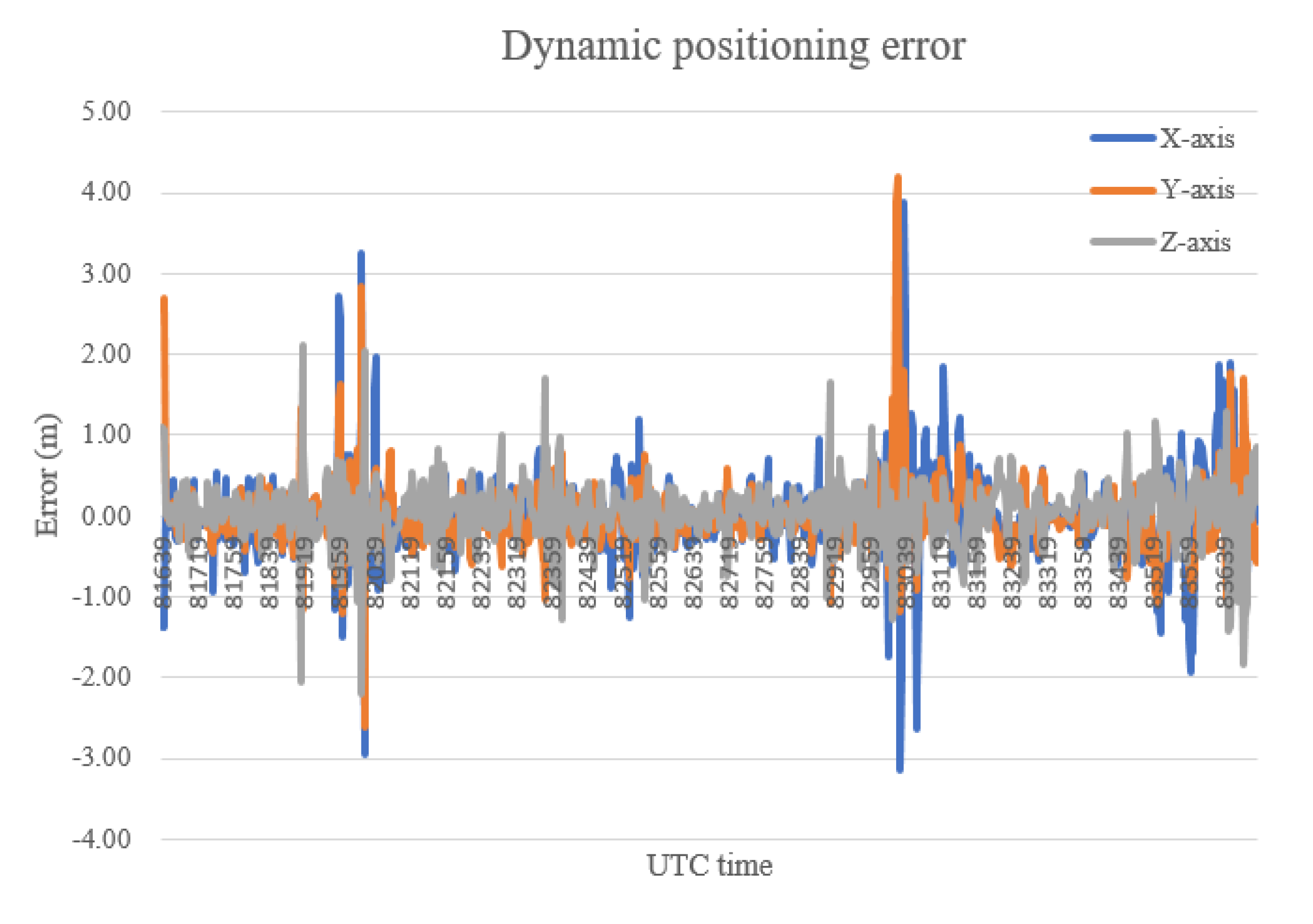
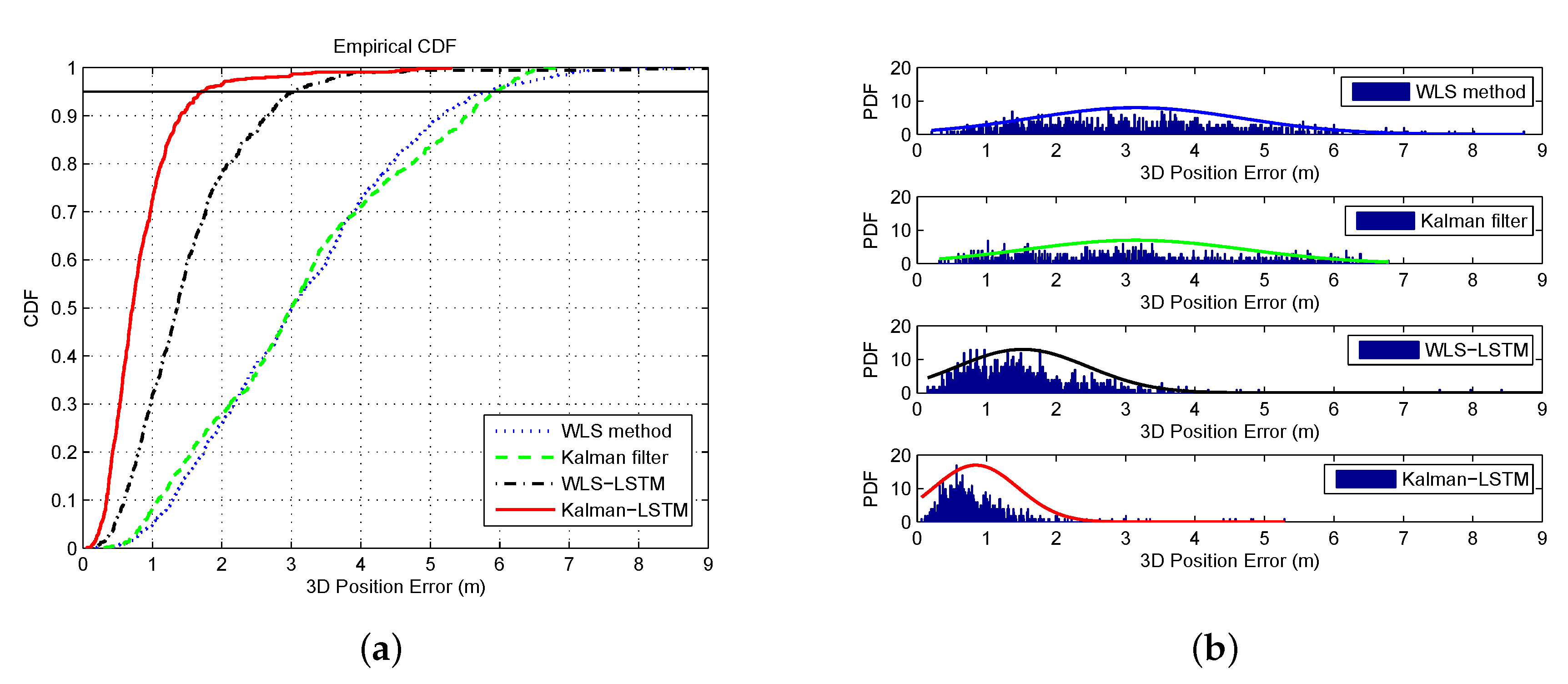
Section 4 presents the experimental results, including the WLS method, Kalman filter, WLS–LSTM error correction method and Kalman–LSTM error correction in a static scene and the correction results in a dynamic scene. Finally, conclusions are given in
Section 5.
5. Conclusion
This paper provides a novel approach to the standard point positioning of integrated BDS/GPS. First, the different error sources of standard point positioning of integrated BDS/GPS are elaborated. Among them, some error sources are difficult to estimate during the positioning process. In some current positioning methods, they are also difficult to obtain very effectively reduced or suppressed. Therefore, an LSTM-based error prediction and correction method is proposed in this paper. On the basis of the traditional positioning method, the data with multiple error sources are learned and predicted, and the prediction results are used for error correction to effectively reduce and suppress the error containing multiple error sources.
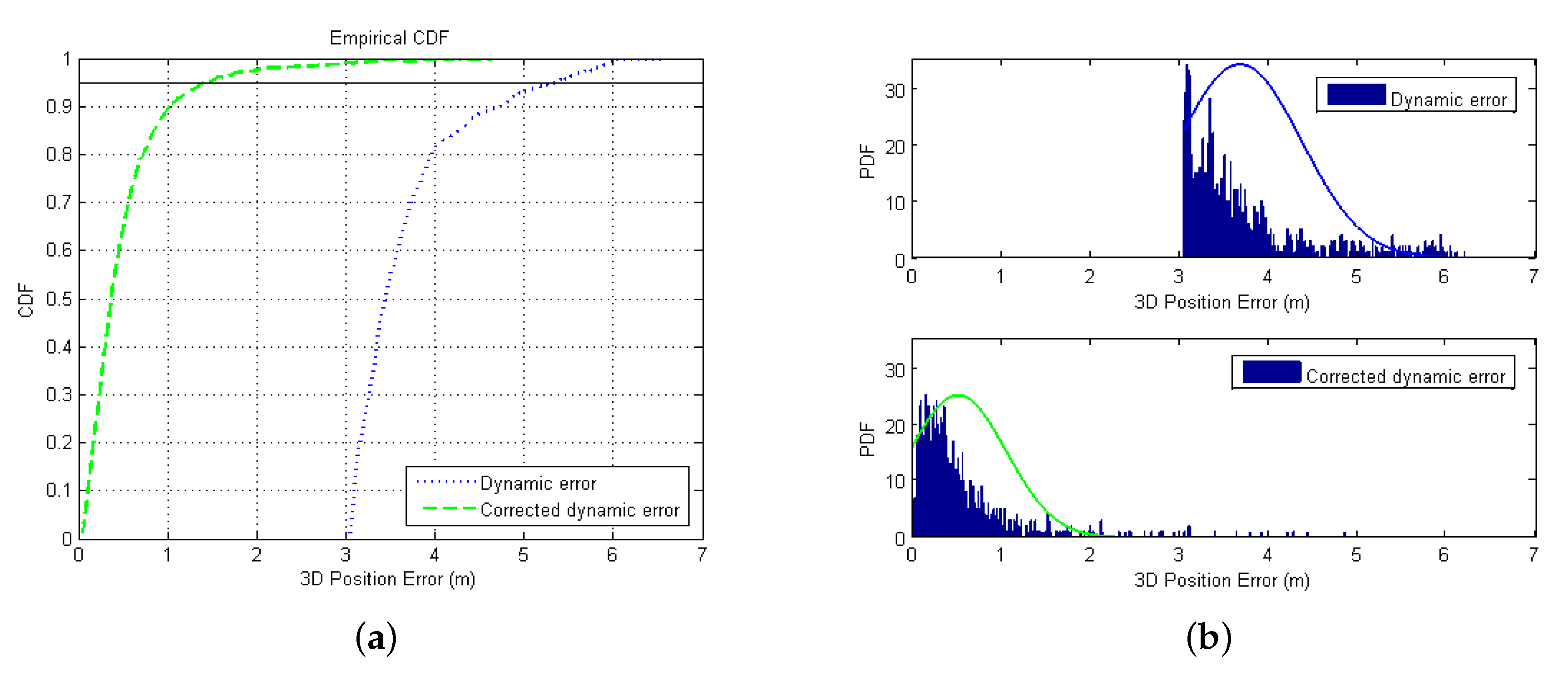
The four methods, namely weighted least square method, Kalman filter, WLS–LSTM and Kalman–LSTM, were tested and compared based on the measured data. It turns out that the LSTM recurrent neural network-based error correction method has greatly improved the accuracy of standard point positioning. The proposed Kalman–LSTM error correction method achieves the best performance, whose point positioning error can almost reach the sub-meter level under the experimental environment. Furthermore, through the error correction method, the positioning error caused by various factors such as the receiver clock deviation can be effectively suppressed. The greater the error is, the more the Kalman–LSTM can contribute to the positioning improvement of the methods without LSTM error correction. In addition, the experimental results in dynamic scenes also show that the proposed LSTM-based error correction method can effectively improve the positioning accuracy.
As for future work, parameter tuning of the LSTM network structure can be developed, and the models in different environments and scenarios can be trained to adapt the method to the navigation and positioning requirements in different environments and scenarios.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}