A Numerical Model for Experimental Designs of Vibration-Based Leak Detection and Monitoring of Water Pipes Using Piezoelectric Patches




Abstract
:1. Introduction
2. Modeling Turbulent Fluid Flow
2.1. Detection Context
2.2. Overview of Modeling Methods
2.3. Important Parameters in Turbulent Flow Modeling
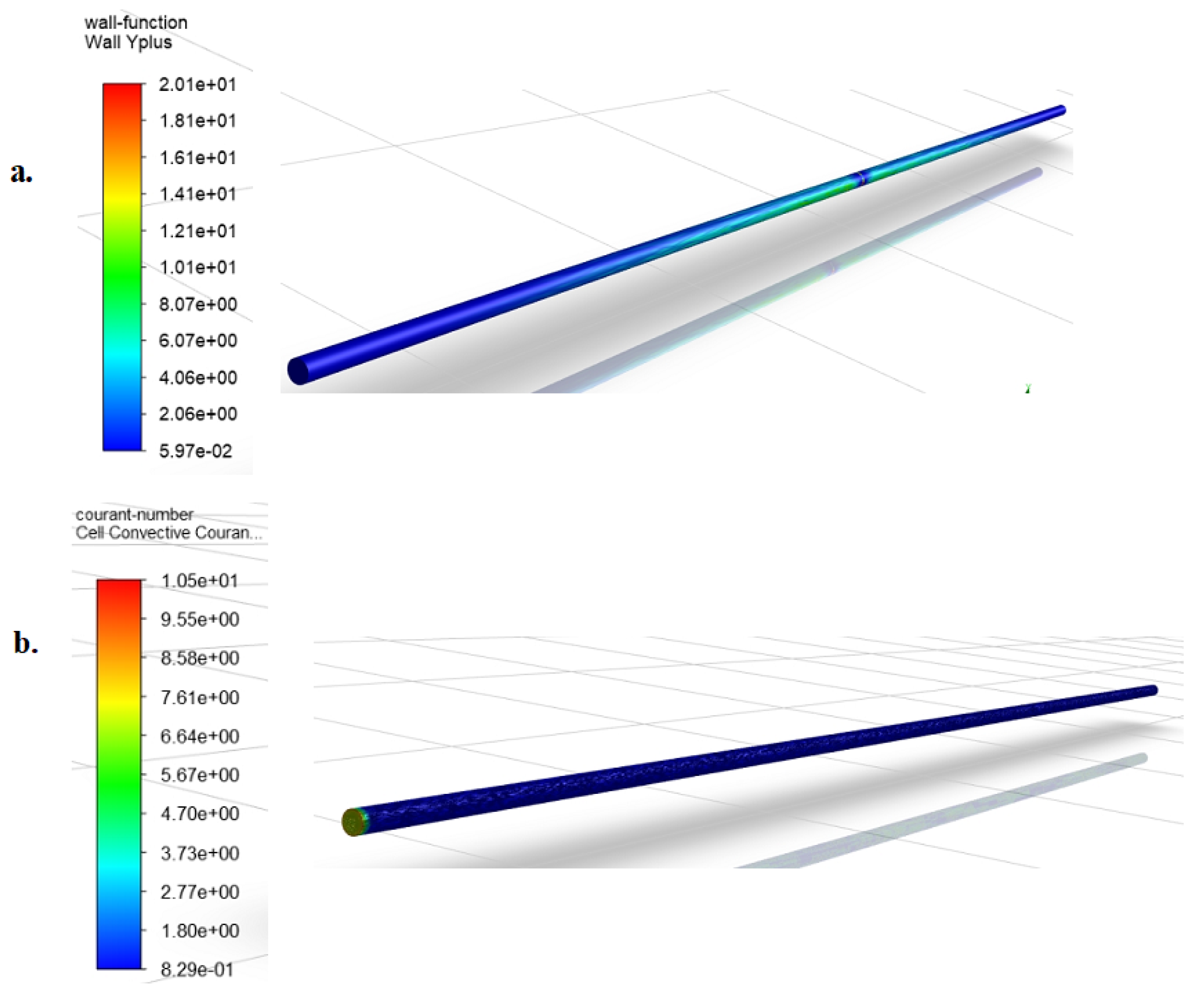
2.3.1. Length of the Pipe Domain and Near-Wall Treatment
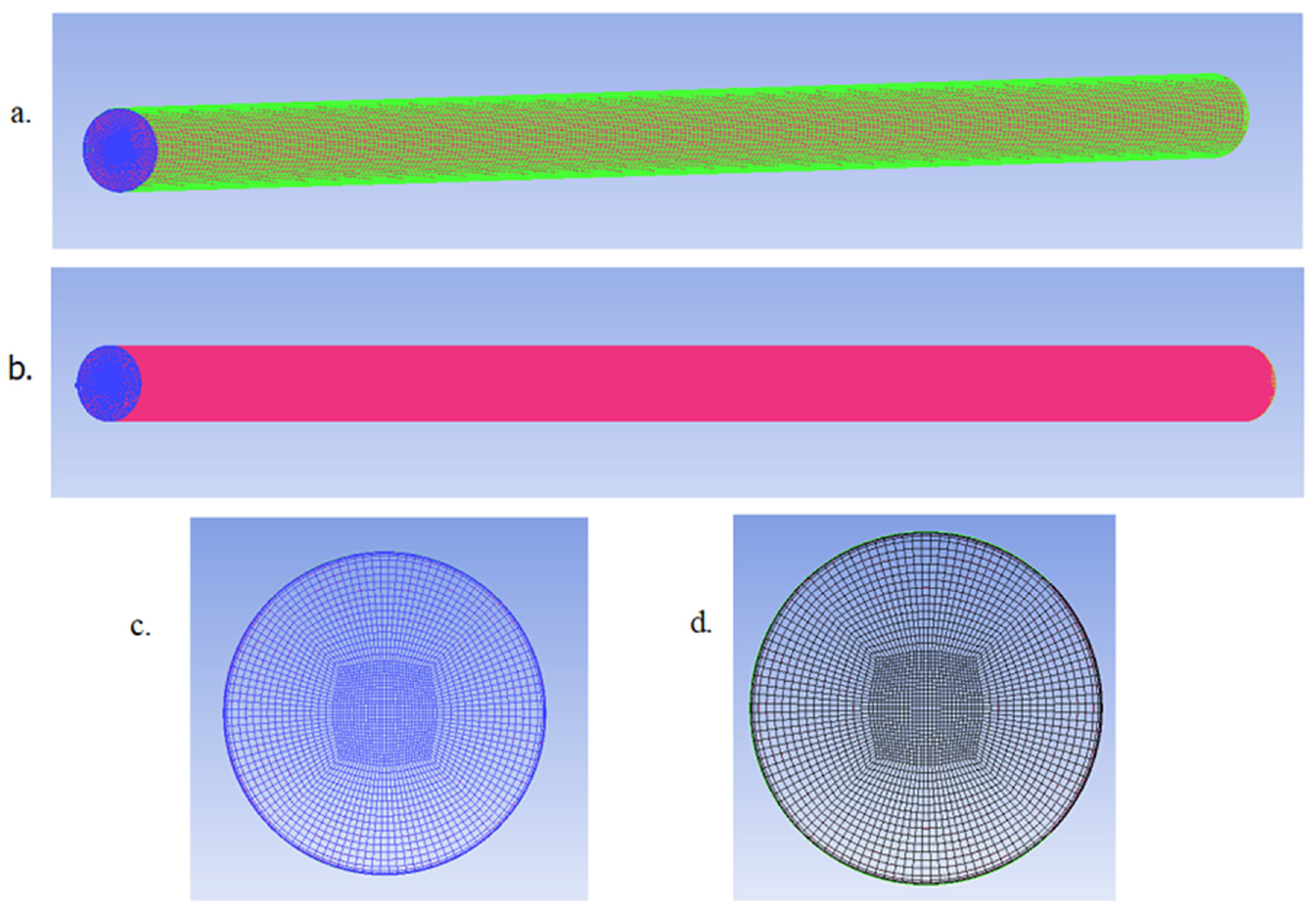
2.3.2. Mesh Grid Size
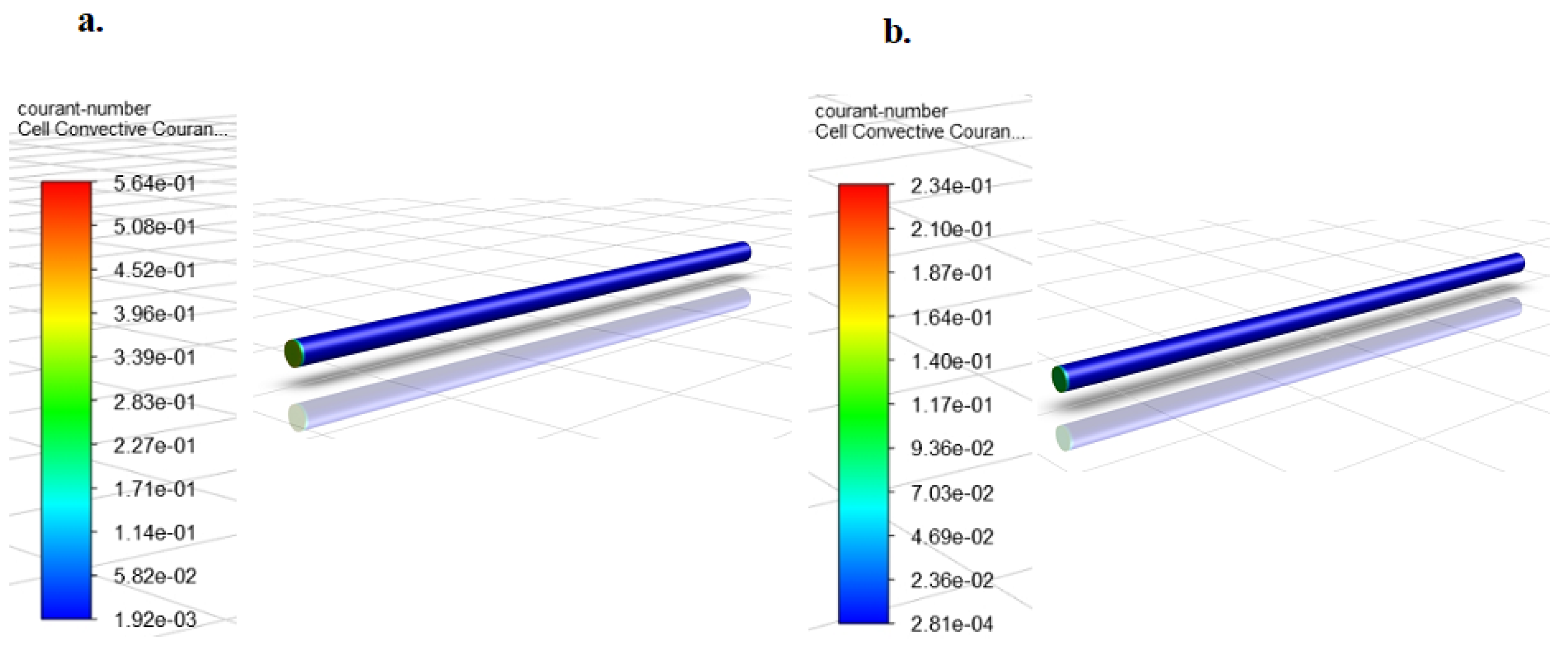
2.3.3. LES Time-Step and Courant Number
3. Methods
3.1. Overview of Numerical Modeling
3.2. Mesh Validation and Selection
3.3. Consideration of Pressure Drop
3.4. Choice of Mesh
3.5. LES Setup to Obtain Internal Pipe Wall Pressure Fluctuations
3.6. Determination of Pipe Surface Strain Conditions and Theoretical PVDF Patch Voltage Output
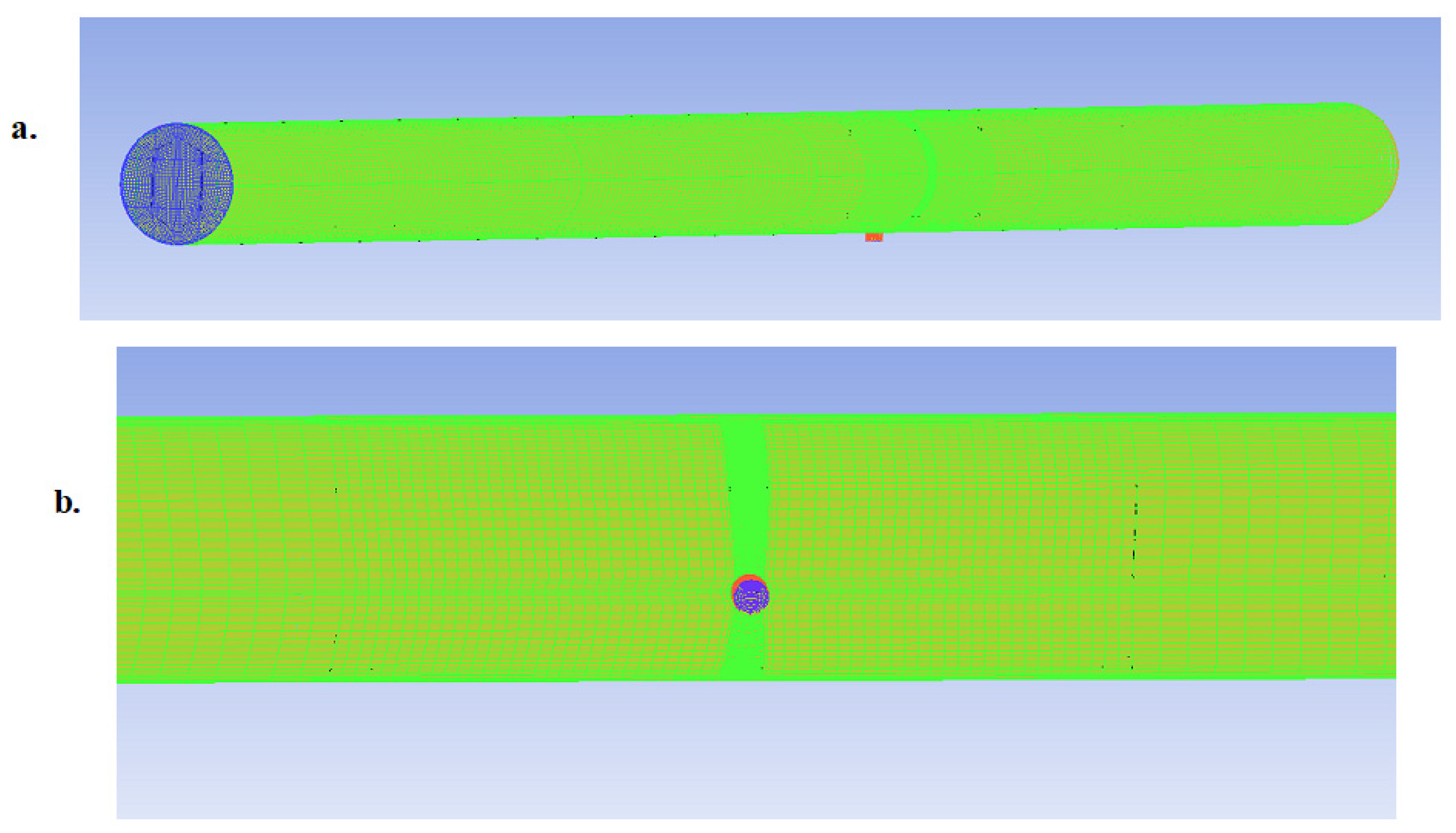
3.7. Determination of the Optimal Distribution of PVDF Patches to Detect the Smallest Pipe Leak
4. Results and Discussion
4.1. Numerical Validation of PVDF Sensor Patches
4.1.1. Pipe Flow Simulations (FLUENT)
4.1.2. Transient Structural Simulations and Determination of Theoretical PVDF Patch Output
4.2. Determination of the Optimal Distribution of PVDF Patches to Detect the Smallest Pipe Leak
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Choi, J.; Shin, J.; Song, C.; Han, S.; Park, D., II. Leak detection and location of water pipes using vibration sensors and modified ML prefilter. Sensors 2017, 17, 2104. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, Y.; Muggleton, J.M.; Liu, Y.; Rustighi, E. An analytical model of ground surface vibration due to axisymmetric wave motion in buried fluid-filled pipes. J. Sound Vib. 2017, 395, 142–159. [Google Scholar] [CrossRef] [Green Version]
- Adegboye, M.A.; Fung, W.K.; Karnik, A. Recent advances in pipeline monitoring and oil leakage detection technologies: Principles and approaches. Sensors 2019, 19, 2548. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Keramat, A.; Tijsseling, A.S.; Hou, Q.; Ahmadi, A. Fluid-structure interaction with pipe-wall viscoelasticity during water hammer. J. Fluids Struct. 2012, 28, 434–455. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Tan, Y.; Zhang, X.; Zhao, J. A novel hybrid technique for leak detection and location in straight pipelines. J. Loss. Prev. Process. Ind. 2015, 35, 157–168. [Google Scholar] [CrossRef]
- Li, S.; Karney, B.W.; Liu, G. FSI research in pipeline systems—A review of the literature. J. Fluids Struct. 2015, 57, 277–297. [Google Scholar] [CrossRef]
- Ismail, M.; Dziyauddin, R.A.; Salleh, N.A.A. Performance evaluation of wireless accelerometer sensor for water pipeline leakage. In Proceedings of the International Symposium on Robotics and Intelligent Sensors (IRIS), Langkawi, Malaysia, 18–20 October 2015; pp. 120–125. [Google Scholar]
- El-Zahab, S.; Mohammed Abdelkader, E.; Zayed, T. An accelerometer- based leak detection system. Mech. Syst. Signal Process. 2018, 108, 58–72. [Google Scholar] [CrossRef]
- Wang, Y.H.; Song, P.; Li, X.; Ru, C.; Ferrari, G.; Balasubramanian, P.; Amabili, M.; Sun, Y.; Liu, X. A paper-based piezoelectric accelerometer. Micromachines 2018, 9, 19. [Google Scholar] [CrossRef] [Green Version]
- Varanis, M.; Silva, A.; Mereles, A.; Pederiva, R. MEMS accelerometers for mechanical vibrations analysis: A comprehensive review with applications. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 1–18. [Google Scholar] [CrossRef]
- Mahmood, M.S.; Celik-Butler, Z.; Butler, D.P. Design, fabrication and characterization of flexible MEMS accelerometer using multi-Level UV-LIGA. Sens. Actuators A Phys. 2017, 263, 530–541. [Google Scholar] [CrossRef]
- Okosun, F.; Cahill, P.; Hazra, B.; Pakrashi, V. Vibration-based leak detection and monitoring of water pipes using output-only piezoelectric sensors. Eur. Phys. J. Spec. Top. 2019, 228, 1659–1675. [Google Scholar] [CrossRef]
- Sirohi, J.; Chopra, I. Fundamental understanding of piezoelectric strain sensors. J. Intell. Mater. Syst. Struct. 2000, 11, 246–257. [Google Scholar] [CrossRef]
- Hellum, A.M.; Mukherjee, R.; Hull, A.J. Dynamics of pipes conveying fluid with non-uniform turbulent and laminar velocity profiles. J. Fluids Struct. 2010, 26, 804–813. [Google Scholar] [CrossRef]
- Escue, A.; Cui, J. Comparison of turbulence models in simulating swirling pipe flows. Appl. Math. Model. 2010, 34, 2840–2849. [Google Scholar] [CrossRef]
- Argyropoulos, C.D.; Markatos, N.C. Recent advances on the numerical modelling of turbulent flows. Appl. Math. Model. 2015, 39, 693–732. [Google Scholar] [CrossRef]
- Wang, X.; Wang, L.; Zheng, G.; Sun, S.; Yang, R. Simulation of leak- age model of long-distance oil pipeline based on FLUENT. Appl. Mech. Mater. 2013, 310, 280–286. [Google Scholar] [CrossRef]
- Pittard, M.T.; Evans, R.P.; Maynes, R.D.; Blotter, J.D. Experimental and numerical investigation of turbulent flow induced pipe vibration in fully developed flow. Rev. Sci. Instrum. 2004, 75, 2393–2401. [Google Scholar] [CrossRef] [Green Version]
- Alfredsson, P.H.; Örlü, R.; Segalini, A. A new formulation for the streamwise turbulence intensity distribution in wall-bounded turbulent flows. Eur. J. Mech. B Fluids 2012, 36, 167–175. [Google Scholar] [CrossRef]
- Khalili, F.; Gamage, P.P.T.; Mansy, H.A. Verification of Turbulence Models for Flow in a Constricted Pipe at Low Reynolds Number. In Proceedings of the 3rd Thermal and Fluids Engineering Conference (TFEC) Florida, Fort Lauderdale, FL, USA, 4–7 March 2018; pp. 1865–1874. [Google Scholar]
- Kamruzzaman, M.; Bekiropoulos, D.; Wolf, A.; Lutz, T.; Würz, W.; Krämer, E. Study of turbulent boundary layer wall pressure fluctuations spectrum models for trailing-edge noise prediction. In Proceedings of the 15th International Conference on the Methods of Aerophysical Research (ICMAR), Novosibirsk, Russia, 1–6 November 2010; pp. 1–11. [Google Scholar]
- Catalano, P.; Wang, M.; Iaccarino, G.; Moin, P. Numerical simulation of the flow around a circular cylinder at high Reynolds numbers. Int. J. Heat. Fluid. Flow. 2003, 24, 463–469. [Google Scholar] [CrossRef]
- Nishino, T.; Roberts, G.T.; Zhang, X. Unsteady RANS and detached- eddy simulations of flow around a circular cylinder in ground effect. J. Fluids Struct. 2008, 24, 18–33. [Google Scholar] [CrossRef] [Green Version]
- Kaur, K.; Annus, I.; Vassiljev, A.; Kändler, N. Determination of Pressure Drop and Flow Velocity in Old Rough Pipes. Proceedings 2018, 2, 590. [Google Scholar] [CrossRef] [Green Version]
- Wilcox, D.C. Turbulence Modeling for CFD, 3rd ed.; DCW Industries: La Cañada, CA, USA, 2006. [Google Scholar]
- Wei, Z.; Yang, W.; Xiao, R. Pressure fluctuation and flow characteristics in a two-stage double-suction centrifugal pump. Symmetry 2019, 11, 65. [Google Scholar] [CrossRef] [Green Version]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Weickert, M.; Teike, G.; Schmidt, O.; Sommerfeld, M. Investigation of the LES WALE turbulence model within the lattice Boltzmann framework. Comput. Math. Appl. 2010, 59, 2200–2214. [Google Scholar] [CrossRef] [Green Version]
- Koukouvinis, P.; Naseri, H.; Gavaises, M. Performance of turbulence and cavitation models in prediction of incipient and developed cavitation. Int. J. Engine Res. 2017, 18, 333–350. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S.-X.; Liu, Y.-H.; Chen, C.-Y. Influence of cavity shape on hydrodynamic noise by a hybrid LES-FW-H method. China Ocean Eng. 2011, 25, 381–394. [Google Scholar] [CrossRef]
- Zeng, Y.; Luo, R. Numerical analysis on pipeline leakage characteristics for incompressible flow. J. Appl. Fluid Mech. 2019, 12, 485–494. [Google Scholar] [CrossRef]
- Liu, S. Implementation of a Complete Wall Function for the Standard k—ε Turbulence Model in OpenFOAM 4.0. In Proceedings of CFD with OpenSource Software. Nilson, H., Ed.; 2016. Available online: http://www.tfd.chalmers.se/~hani/kurser/OS_CFD_2016 (accessed on 6 October 2016).
- Olivares, P.A.V. Acoustic Wave Propagation and Modeling Turbulent Water Flow with Acoustics for District Heating Pipes Water Flows with Acoustics for District Heating Pipes. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, 2009. [Google Scholar]
- Loh, S.K.; Faris, W.F.; Hamdi, M. Fluid-structure interaction simulation of transient turbulent flow in a curved tube with fixed supports using LES. Prog. Comput. Fluid Dyn. 2013, 13, 11–19. [Google Scholar] [CrossRef]
- Ahsan, M. Numerical analysis of friction factor for a fully developed tur- bulent flow using k–ε turbulence model with enhanced wall treatment. Beni-Suef Univ. J. Basic Appl. Sci. 2014, 3, 269–277. [Google Scholar] [CrossRef] [Green Version]
- Mirmanto, M. Developing Flow Pressure Drop and Friction Factor of Water in Copper Microchannels. J. Mech. Eng. Autom. 2013, 3, 641–649. [Google Scholar]
- Valizadeh, K.; Farahbakhsh, S.; Bateni, A.; Zargarian, A.; Davarpanah, A.; Al- Izadeh, A.; Zarei, M. A parametric study to simulate the non-Newtonian turbulent flow in spiral tubes. Energy Sci. Eng. 2020, 8, 134–149. [Google Scholar] [CrossRef] [Green Version]
- Ge, C.; Wang, G.; Ye, H. Analysis of the smallest detectable leakage flow rate of negative pressure wave-based leak detection systems for liquid pipelines. Comput. Chem. Eng. 2008, 32, 1669–1680. [Google Scholar] [CrossRef]
- Van Zyl, J.E.; Clayton, C.R.I. The effect of pressure on leakage in water distribution systems. Water Manag. 2007, 160, 109–114. [Google Scholar] [CrossRef]
- Okosun, F.; Pakrashi, V. Experimental validation of a piezoelectric measuring chain for monitoring structural dynamics. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020. [Google Scholar]
- Krishnan, M.; Bhowmik, B.; Hazra, B.; Pakrashi, V. Real time damage detection using recursive principal components and time varying autoregressive modeling. Mech. Syst. Signal. Process. 2020, 101, 549–574. [Google Scholar]
- Bhowmik, B.; Tripura, T.; Hazra, B.; Pakrashi, V. First order eigen perturbation techniques for real time damage detection of vibrating systems: Theory and applications. Appl. Mech. Rev. 2020, 71, 060801. [Google Scholar] [CrossRef]
- Cahill, P.; Pakrashi, V.; Sun, P.; Mathewson, A.; Nagarajaiah, S. Energy Harvesting Techniques for Health Monitoring and Indicators for Control of a Damaged Pipe Structure. Smart Struct. Syst. 2018, 21, 287–303. [Google Scholar]
- Srbinovski, B.; Magno, M.; Edwards Murphy, F.; Pakrashi, V.; Popovici, E. An Energy Aware Adaptive Sampling Algorithm for Energy Harvesting WSN with Energy Hungry Sensors. Sensors 2016, 16, 448. [Google Scholar] [CrossRef] [Green Version]
- Tripura, T.; Bhowmik, B.; Hazra, B.; Pakrashi, V. Real time damage detection of Degrading Systems. Struct. Health Monit. 2020, 19, 810–837. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Internal pipe diameter | 37.3 | mm |
| Pipe wall thickness | 2.5 | mm |
| Bulk Modulus | 160 | GPa |
| Modulus of Elasticity | 200 | GPa |
| Poisson ratio | 0.29 | NA |
| Density | 7850 | kg/m3 |
| Mesh | Fluid Domain | Interior Faces | Inlet Faces | Outlet Faces | Wall Faces |
|---|---|---|---|---|---|
| (HEX Cells) | (QUAD Faces) | ||||
| Model 1 | 496,545 | 1,187,992 | 1754 | 1754 | 21,368 |
| Model 2 | 671,553 | 1,897,520 | 2697 | 2697 | 7652 |
| Model 3 | 787,089 | 2,343,664 | 3161 | 3161 | 38,884 |
| Flow Rate | Re | Outlet Faces | ||||
|---|---|---|---|---|---|---|
| (liters/min) | (Pa) | Mesh 1 | Mesh 2 | Mesh 3 | ||
| 90.85 | 51,686.80 | 0.0305 | 785.05 | 751.26 (4.30%) | 777.62 (0.94%) | 783.88 (0.15%) |
| 71.92 | 40,918.72 | 0.0309 | 498.46 | 462.52 (7.21%) | 483.00 (3.10%) | 499.61 (0.23%) |
| 56.78 | 32,304.35 | 0.0315 | 316.74 | 287.88 (9.11%) | 303.27 (4.26%) | 317.94 (0.38%) |
| 45.42 | 25,843.47 | 0.0322 | 207.23 | 193.91 (6.43%) | 213.80 (3.17%) | 209.13 (0.92%) |
| 26.50 | 15,075.35 | 0.0342 | 74.90 | 68.85 (8.07%) | 76.26 (1.81%) | 75.43 (0.71%) |
| Flow Rate | Outlet Faces | |||
|---|---|---|---|---|
| (liters/min) | 2 mm Leak | 5 mm Leak | 7 mm Leak | 10 mm Leak |
| 90.85 | 0.0054 | 0.026 | 0.053 | 0.11 |
| 71.92 | 0.0045 | 0.021 | 0.042 | 0.086 |
| 56.78 | 0.0028 | 0.016 | 0.033 | 0.068 |
| 45.42 | 0.0021 | 0.013 | 0.027 | 0.054 |
| 26.50 | 0.0013 | 0.0079 | 0.016 | 0.032 |
| Parameter | Value | Unit |
|---|---|---|
| Area, Ap | 0.00175 | m2 |
| Capacitance, Cp | Approx. 3.30 | nF |
| Thickness, tp | 52 | µm |
| Resistance, R | 2.66 | MΩ |
| Modulus of Elasticity, Y | 8.3 | GPa |
| Piezoelectric strain constant, d31 | 30 | PC/N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Okosun, F.; Celikin, M.; Pakrashi, V. A Numerical Model for Experimental Designs of Vibration-Based Leak Detection and Monitoring of Water Pipes Using Piezoelectric Patches. Sensors 2020, 20, 6708. https://doi.org/10.3390/s20236708
Okosun F, Celikin M, Pakrashi V. A Numerical Model for Experimental Designs of Vibration-Based Leak Detection and Monitoring of Water Pipes Using Piezoelectric Patches. Sensors. 2020; 20(23):6708. https://doi.org/10.3390/s20236708
Chicago/Turabian StyleOkosun, Favour, Mert Celikin, and Vikram Pakrashi. 2020. "A Numerical Model for Experimental Designs of Vibration-Based Leak Detection and Monitoring of Water Pipes Using Piezoelectric Patches" Sensors 20, no. 23: 6708. https://doi.org/10.3390/s20236708
APA StyleOkosun, F., Celikin, M., & Pakrashi, V. (2020). A Numerical Model for Experimental Designs of Vibration-Based Leak Detection and Monitoring of Water Pipes Using Piezoelectric Patches. Sensors, 20(23), 6708. https://doi.org/10.3390/s20236708