Developing a Motor Imagery-Based Real-Time Asynchronous Hybrid BCI Controller for a Lower-Limb Exoskeleton


 ,
,  ,
, 


Abstract
:1. Introduction
2. Methods
2.1. System Overview
2.2. Data Acquisition
2.2.1. EEG System
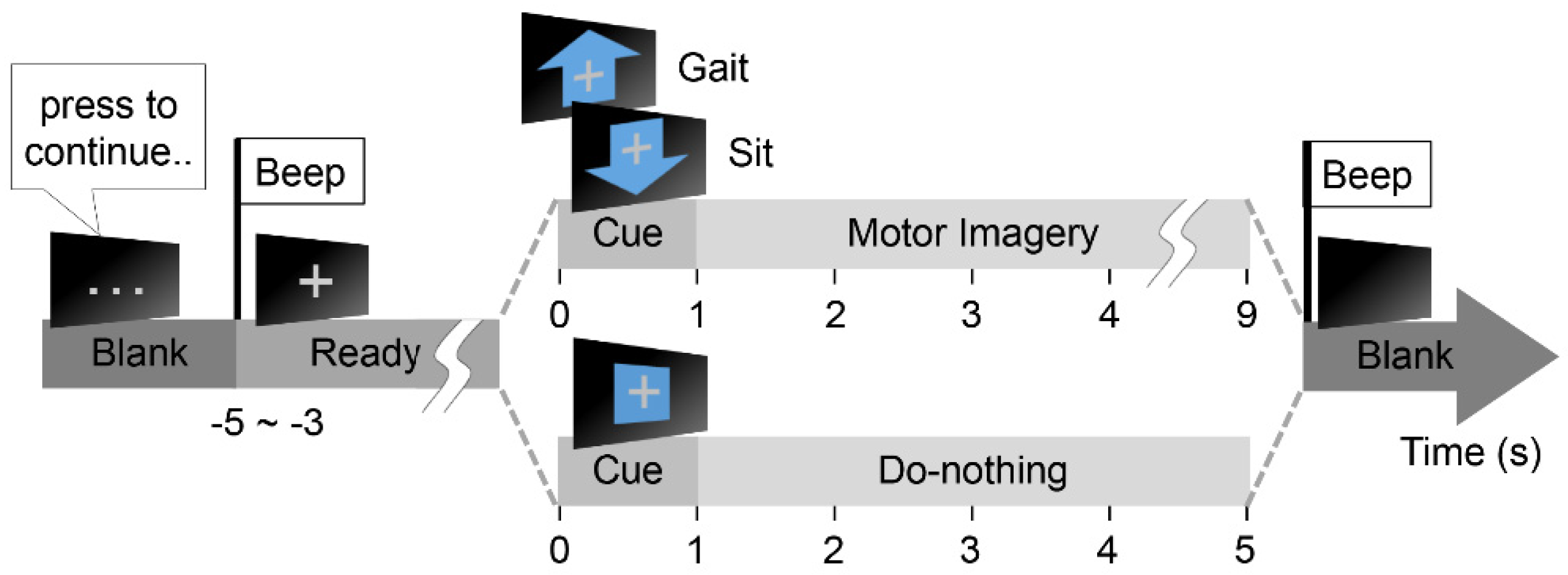
2.2.2. MI Protocol
2.3. EEG Signal Processing
2.3.1. Feature Extraction
2.3.2. Feature Selection
2.3.3. Real-Time Decoder
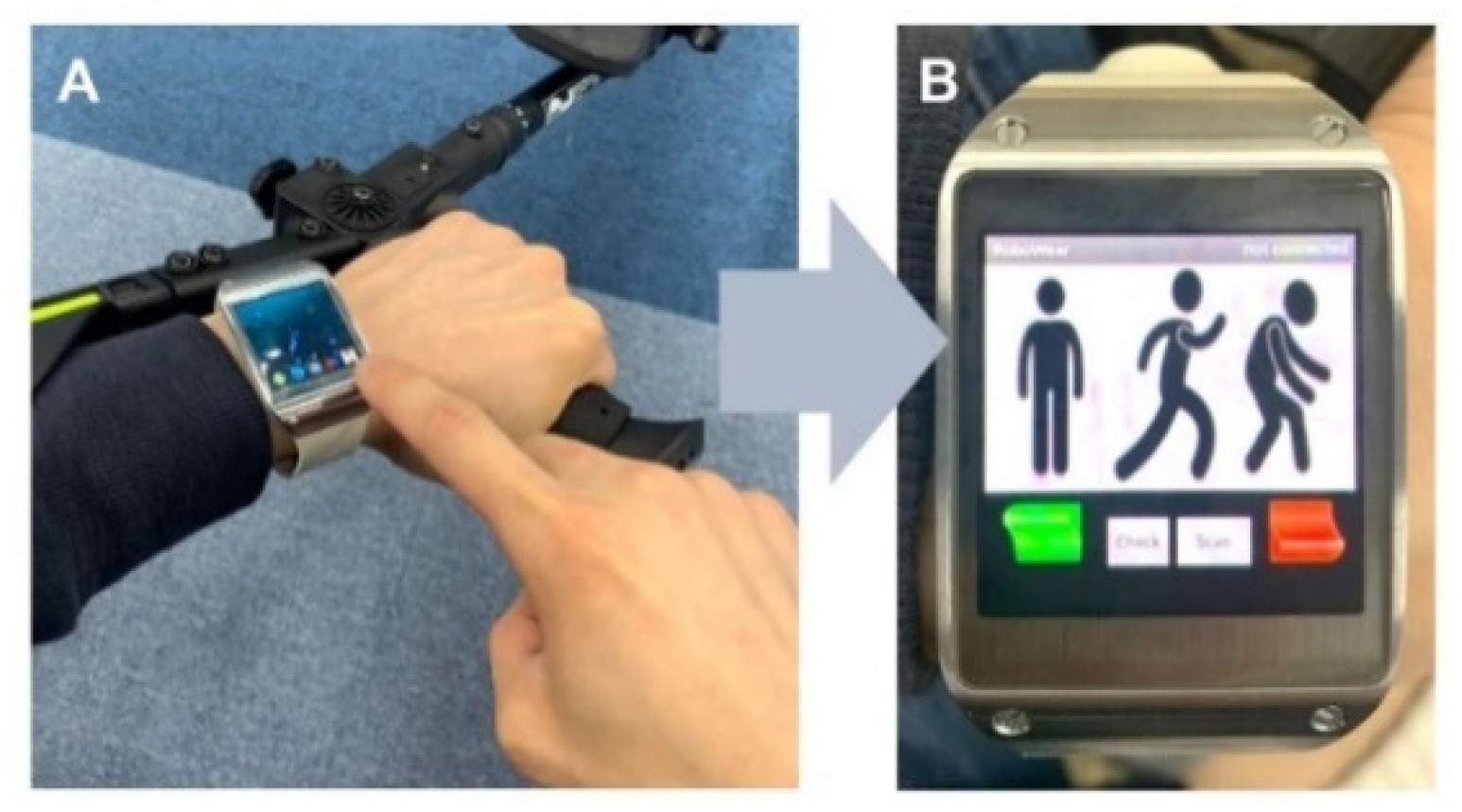
2.4. BCI Controller
2.4.1. Triple Eye Blink
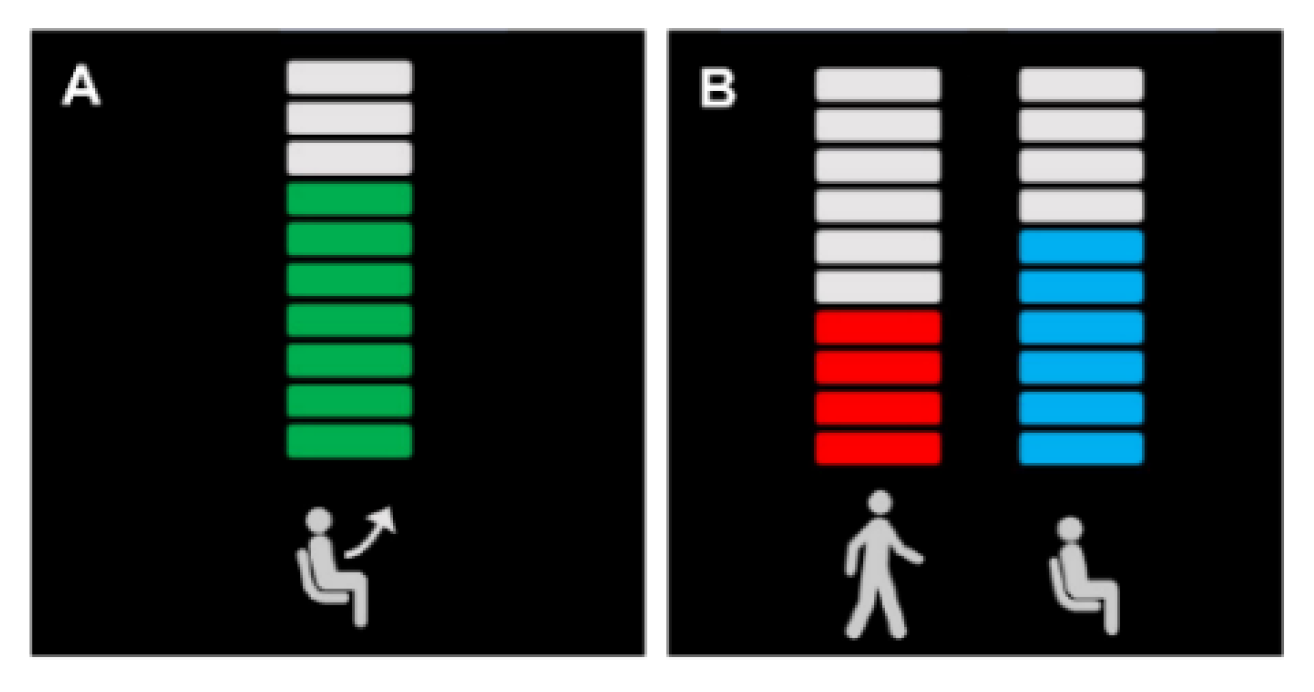
2.4.2. MI Buffer and Visual Feedback
2.5. System Evaluation
2.5.1. Controller Performance
2.5.2. Classification Accuracy
2.5.3. Information Transfer Rate
3. Results
3.1. Feature Selection
3.2. System Evaluation
3.2.1. Control Performance
3.2.2. Classification Accuracy
3.2.3. Information Transfer Rate
4. Discussion
4.1. Characteristics of the EEG Decoder
4.2. Performance of the BCI Controller
4.3. Limitations and Future Direction
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Pfurtscheller, G.; Neuper, C. Motor imagery and direct brain-computer communication. Proc. IEEE 2001, 89, 1123–1134. [Google Scholar] [CrossRef]
- Wolpaw, J.; Birbaumer, N.; Heetderks, W.J.; Mcfarland, D.; Peckham, P.; Schalk, G.; Donchin, E.; Quatrano, L.A.; Robinson, C.; Vaughan, T. Brain-Computer interface technology: A review of the first international meeting. IEEE Trans. Rehabil. Eng. 2000, 8, 164–173. [Google Scholar] [CrossRef] [PubMed]
- He, Y.; Eguren, D.; Azorín, J.M.; Grossman, R.G.; Luu, T.P.; Contreras-Vidal, J.L. Brain-machine interfaces for controlling lower-limb powered robotic systems. J. Neural Eng. 2018, 15, 21004. [Google Scholar] [CrossRef] [PubMed]
- Tariq, M.; Trivailo, P.M.; Simic, M. EEG-Based BCI Control Schemes for Lower-Limb Assistive-Robots. Front. Hum. Neurosci. 2018, 12, 312. [Google Scholar] [CrossRef] [Green Version]
- Vaughan, T.M.; McFarland, D.J.; Schalk, G.; Sarnacki, W.A.; Krusienski, D.J.; Sellers, E.W.; Wolpaw, J.R. The wadsworth BCI research and development program: At home with BCI. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 229–233. [Google Scholar] [CrossRef]
- Jeong, J.-H.; Kwak, N.-S.; Lee, M.; Lee, S. Decoding of walking Intention under Lower limb exoskeleton Environment using MRCP Feature. In Proceedings of the GBCIC, Graz, Austria, 18–22 September 2017. [Google Scholar]
- Kwak, N.-S.; Müller, K.-R.; Lee, S.-W. A lower limb exoskeleton control system based on steady state visual evoked potentials. J. Neural Eng. 2015, 12, 56009. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Lopes da Silva, F.H. Event-related EEG/MEG synchronization and desynchronization: Basic principles. Clin. Neurophysiol. Off. J. Int. Fed. Clin. Neurophysiol. 1999, 110, 1842–1857. [Google Scholar] [CrossRef]
- Miranda, R.A.; Casebeer, W.D.; Hein, A.M.; Judy, J.W.; Krotkov, E.P.; Laabs, T.L.; Manzo, J.E.; Pankratz, K.G.; Pratt, G.A.; Sanchez, J.C.; et al. DARPA-funded efforts in the development of novel brain-computer interface technologies. J. Neurosci. Methods 2015, 244, 52–67. [Google Scholar] [CrossRef] [Green Version]
- Vidal, J.J. Toward Direct Brain-Computer Communication. Annu. Rev. Biophys. Bioeng. 1973, 2, 157–180. [Google Scholar] [CrossRef]
- Cheron, G.; Duvinage, M.; De Saedeleer, C.; Castermans, T.; Bengoetxea, A.; Petieau, M.; Seetharaman, K.; Hoellinger, T.; Dan, B.; Dutoit, T.; et al. From spinal central pattern generators to cortical network: Integrated BCI for walking rehabilitation. Neural Plast. 2012, 2012. [Google Scholar] [CrossRef]
- Wang, S.; Wang, L.; Meijneke, C.; Van Asseldonk, E.; Hoellinger, T.; Cheron, G.; Ivanenko, Y.; La Scaleia, V.; Sylos-Labini, F.; Molinari, M.; et al. Design and Control of the MINDWALKER Exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 277–286. [Google Scholar] [CrossRef] [PubMed]
- Gordleeva, S.; Lukoyanov, M.V.; Mineev, S.; Khoruzhko, M.A.; Mironov, V.; Kaplan, A.; Kazantsev, V. Exoskeleton Control System Based on Motor-Imaginary Brain–Computer Interface. Sovrem. Tehnol. Med. 2017, 9, 31. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Liu, D.; Perroud, L.; Chavarriaga, R.; del Millán, J.R. Endogenous Control of Powered Lower-Limb Exoskeleton. In Proceedings of the Wearable Robotics: Challenges and Trends, Segovia, Spain, 18–21 October 2016; González-Vargas, J., Ibáñez, J., Contreras-Vidal, J.L., van der Kooij, H., Pons, J.L., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 115–119. [Google Scholar]
- Wang, C.; Wu, X.; Wang, Z.; Ma, Y. Implementation of a Brain-Computer Interface on a Lower-Limb Exoskeleton. IEEE Access 2018, 6, 38524–38534. [Google Scholar] [CrossRef]
- Yu, G.; Wang, J.; Chen, W.; Zhang, J. EEG-based brain-controlled lower extremity exoskeleton rehabilitation robot. In Proceedings of the 2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; pp. 763–767. [Google Scholar]
- Do, A.H.; Wang, P.T.; King, C.E.; Chun, S.N.; Nenadic, Z. Brain-computer interface controlled robotic gait orthosis. J. Neuroeng. Rehabil. 2013, 10, 111. [Google Scholar] [CrossRef] [Green Version]
- López-Larraz, E.; Trincado-Alonso, F.; Rajasekaran, V.; Pérez-Nombela, S.; del-Ama, A.J.; Aranda, J.; Minguez, J.; Gil-Agudo, A.; Montesano, L. Control of an Ambulatory Exoskeleton with a Brain–Machine Interface for Spinal Cord Injury Gait Rehabilitation. Front. Neurosci. 2016, 10, 359. [Google Scholar] [CrossRef]
- Donati, A.R.C.; Shokur, S.; Morya, E.; Campos, D.S.F.; Moioli, R.C.; Gitti, C.M.; Augusto, P.B.; Tripodi, S.; Pires, C.G.; Pereira, G.A.; et al. Long-Term Training with a Brain-Machine Interface-Based Gait Protocol Induces Partial Neurological Recovery in Paraplegic Patients. Sci. Rep. 2016, 6, 30383. [Google Scholar] [CrossRef] [Green Version]
- Talukdar, U.; Hazarika, S.M.; Gan, J.Q. Motor imagery and mental fatigue: Inter-relationship and EEG based estimation. J. Comput. Neurosci. 2019, 46, 55–76. [Google Scholar] [CrossRef]
- Townsend, G.; Graimann, B.; Pfurtscheller, G. Continuous EEG classification during motor imagery-simulation of an asynchronous BCI. IEEE Trans. Neural Syst. Rehabil. Eng. 2004, 12, 258–265. [Google Scholar] [CrossRef]
- Han, C.-H.; Müller, K.-R.; Hwang, H.-J. Brain-Switches for Asynchronous Brain–Computer Interfaces: A Systematic Review. Electronics 2020, 9, 422. [Google Scholar] [CrossRef] [Green Version]
- Han, C.-H.; Kim, E.; Im, C.-H. Development of a Brain-Computer Interface Toggle Switch with Low False-Positive Rate Using Respiration-Modulated Photoplethysmography. Sensors 2020, 20, 348. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Liu, Y.; Yin, E.; Jiang, J.; Zhou, Z.; Hu, D. An Asynchronous Hybrid Spelling Approach Based on EEG–EOG Signals for Chinese Character Input. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1292–1302. [Google Scholar] [CrossRef] [PubMed]
- Ortiz, M.; Ferrero, L.; Iáñez, E.; Azorín, J.M.; Contreras-Vidal, J.L. Sensory Integration in Human Movement: A New Brain-Machine Interface Based on Gamma Band and Attention Level for Controlling a Lower-Limb Exoskeleton. Front. Bioeng. Biotechnol. 2020, 8. [Google Scholar] [CrossRef] [PubMed]
- Pfurtscheller, G.; Solis-Escalante, T.; Ortner, R.; Linortner, P.; Müller-Putz, G.R. Self-paced operation of an SSVEP-Based orthosis with and without an imagery-based “brain switch:” A feasibility study towards a hybrid BCI. IEEE Trans. Neural Syst. Rehabil. Eng. Publ. IEEE Eng. Med. Biol. Soc. 2010, 18, 409–414. [Google Scholar] [CrossRef] [PubMed]
- Pfurtscheller, G.; Allison, B.Z.; Bauernfeind, G.; Brunner, C.; Solis Escalante, T.; Scherer, R.; Zander, T.O.; Mueller-Putz, G.; Neuper, C.; Birbaumer, N. The hybrid BCI. Front. Neurosci. 2010, 4, 3. [Google Scholar] [CrossRef]
- Kim, Y.; Song, C.; Park, J. Development of actuation system for wearable robots using spiral spring. In Proceedings of the 2012 12th International Conference on Control, Automation and Systems, Jeju Island, Korea, 17–21 October 2012; pp. 1863–1868. [Google Scholar]
- Ramoser, H.; Muller-Gerking, J.; Pfurtscheller, G. Optimal spatial filtering of single trial EEG during imagined hand movement. IEEE Trans. Rehabil. Eng. 2000, 8, 441–446. [Google Scholar] [CrossRef] [Green Version]
- Ang, K.K.; Chin, Z.Y.; Wang, C.; Guan, C.; Zhang, H. Filter Bank Common Spatial Pattern Algorithm on BCI Competition IV Datasets 2a and 2b. Front. Neurosci. 2012, 6, 39. [Google Scholar] [CrossRef] [Green Version]
- Salinas, R.; Schachter, E.; Miranda, M. Recognition and Real-Time Detection of Blinking Eyes on Electroencephalographic Signals Using Wavelet Transform. In Proceedings of the Progress in Pattern Recognition, Image Analysis, Computer Vision, and Applications, Buenos Aires, Argentina, 3–6 September 2012; Alvarez, L., Mejail, M., Gomez, L., Jacobo, J., Eds.; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2012; pp. 682–690. [Google Scholar]
- Choi, J.; Kim, K.; Lee, J.; Lee, S.J.; Kim, H. Robust Semi-synchronous BCI Controller for Brain-Actuated Exoskeleton System. In Proceedings of the 2020 8th International Winter Conference on Brain-Computer Interface (BCI), High1 Resort, Korea, 18–20 February 2020; pp. 1–3. [Google Scholar]
- Mcfarland, D.; Sarnacki, W.; Wolpaw, J. Brain-computer interface (BCI) operation: Optimizing information transfer rates. Biol. Psychol. 2003, 63, 237–251. [Google Scholar] [CrossRef]
- Delorme, A.; Makeig, S. EEGLAB: An open source toolbox for analysis of single-trial EEG dynamics including independent component analysis. J. Neurosci. Methods 2004, 134, 9–21. [Google Scholar] [CrossRef] [Green Version]
- Cebolla, A.M.; Petieau, M.; Cevallos, C.; Leroy, A.; Dan, B.; Cheron, G. Long-lasting cortical reorganization as the result of motor imagery of throwing a ball in a virtual tennis court. Front. Psychol. 2015, 6, 1869. [Google Scholar] [CrossRef]
- Sabate, M.; Llanos, C.; Enriquez, E.; Díaz, M. Mu rhythm, visual processing and motor control. Clin. Neurophysiol. 2011, 123, 550–557. [Google Scholar] [CrossRef]
- Stinear, C.M.; Byblow, W.D.; Steyvers, M.; Levin, O.; Swinnen, S.P. Kinesthetic, but not visual, motor imagery modulates corticomotor excitability. Exp. Brain Res. 2006, 168, 157–164. [Google Scholar] [CrossRef] [PubMed]
- Tariq, M.; Trivailo, P.M.; Simic, M. Mu-Beta event-related (de)synchronization and EEG classification of left-right foot dorsiflexion kinaesthetic motor imagery for BCI. PLoS ONE 2020, 15, e0230184. [Google Scholar] [CrossRef] [PubMed]
- Millan, J.R.; Renkens, F.; Mourino, J.; Gerstner, W. Noninvasive brain-actuated control of a mobile robot by human EEG. IEEE Trans. Biomed. Eng. 2004, 51, 1026–1033. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chae, Y.; Jeong, J.; Jo, S. Toward Brain-Actuated Humanoid Robots: Asynchronous Direct Control Using an EEG-Based BCI. IEEE Trans. Robot. 2012, 28, 1131–1144. [Google Scholar] [CrossRef]
- Tang, Z.; Li, C.; Sun, S. Single-trial EEG classification of motor imagery using deep convolutional neural networks. Optik 2017, 130, 11–18. [Google Scholar] [CrossRef]
- Roy, Y.; Banville, H.; Albuquerque, I.; Gramfort, A.; Falk, T.H.; Faubert, J. Deep learning-based electroencephalography analysis: A systematic review. J. Neural Eng. 2019, 16, 51001. [Google Scholar] [CrossRef]
- Ha, K.-W.; Jeong, J.-W. Motor Imagery EEG Classification Using Capsule Networks. Sensors 2019, 19, 2854. [Google Scholar] [CrossRef] [Green Version]
- Jin, J.; Xiao, R.; Daly, I.; Miao, Y.; Wang, X.; Cichocki, A. Internal Feature Selection Method of CSP Based on L1-Norm and Dempster-Shafer Theory. IEEE Trans. Neural Networks Learn. Syst. 2020, 1–12. [Google Scholar] [CrossRef]
- Jin, J.; Liu, C.; Daly, I.; Miao, Y.; Li, S.; Wang, X.; Cichocki, A. Bispectrum-Based Channel Selection for Motor Imagery Based Brain-Computer Interfacing. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2153–2163. [Google Scholar] [CrossRef]
- Lebedev, M.A.; Nicolelis, M.A.L. Brain-Machine Interfaces: From Basic Science to Neuroprostheses and Neurorehabilitation. Physiol. Rev. 2017, 97, 767–837. [Google Scholar] [CrossRef]
- Bockbrader, M.A.; Francisco, G.; Lee, R.; Olson, J.; Solinsky, R.; Boninger, M.L. Brain Computer Interfaces in Rehabilitation Medicine. PM R 2018, 10, S233–S243. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lazarou, I.; Nikolopoulos, S.; Petrantonakis, P.C.; Kompatsiaris, I.; Tsolaki, M. EEG-Based Brain–Computer Interfaces for Communication and Rehabilitation of People with Motor Impairment: A Novel Approach of the 21st Century. Front. Hum. Neurosci. 2018, 12, 14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pfurtscheller, G.; Neuper, C.; Muller, G.R.; Obermaier, B.; Krausz, G.; Schlogl, A.; Scherer, R.; Graimann, B.; Keinrath, C.; Skliris, D.; et al. Graz-BCI: State of the art and clinical applications. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 177. [Google Scholar] [CrossRef] [PubMed]
- Sitaram, R.; Ros, T.; Stoeckel, L.; Haller, S.; Scharnowski, F.; Lewis-Peacock, J.; Weiskopf, N.; Blefari, M.L.; Rana, M.; Oblak, E.; et al. Closed-loop brain training: The science of neurofeedback. Nat. Rev. Neurosci. 2017, 18, 86–100. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morone, G.; Spitoni, G.F.; De Bartolo, D.; Ghanbari Ghooshchy, S.; Di Iulio, F.; Paolucci, S.; Zoccolotti, P.; Iosa, M. Rehabilitative devices for a top-down approach. Expert Rev. Med. Devices 2019, 16, 187–195. [Google Scholar] [CrossRef] [PubMed]
- Cho, H.-Y.; Kim, J.-S.; Lee, G.-C. Effects of motor imagery training on balance and gait abilities in post-stroke patients: A randomized controlled trial. Clin. Rehabil. 2012, 27. [Google Scholar] [CrossRef] [PubMed]
- Cevallos, C.; Zarka, D.; Hoellinger, T.; Leroy, A.; Dan, B.; Cheron, G. Oscillations in the human brain during walking execution, imagination and observation. Neuropsychologia 2015, 79, 223–232. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operator’s Instructions | |
|---|---|
| Before MI | “Be familiar with consistent locomotion of the robot trajectory with your pair of crutches.” “While practicing ‘sit’, please pay attention to your upper limb movement which plays an important role in lowering the body down to the chair with the exoskeleton.” |
| During MI | “Pay attention to the kinesthetic sensation that just before your limb about to execute the movement.” “Do mental rehearsal in a slow movement phase, for example, heel strike, weight shift, and toe-off.” “We also recommend you to perceive the input sensation of foot sole and hand grip.” “For ‘Do-nothing’, please ignore the somatosensory or visual input sensation, rather stay unfocused eyes with an absent-minded.” |
| Prohibited | “Do not picture the scene of observing yourselves or other person’s movement execution.” |
| Subject | BCI Controller (s) | Smartwatch Controller (s) | Time Ratio (%) |
|---|---|---|---|
| S1 | 170.0 | 118.6 | 143.3 |
| S2 | 125.4 | 93.7 | 133.8 |
| S3 | 145.4 | 103.2 | 140.9 |
| S4 | 159.6 | 97.1 | 164.4 |
| S5 | 144.3 | 94.2 | 153.2 |
| S6 | 157.1 | 123.7 | 127.0 |
| S7 | 153.2 | 121.9 | 125.7 |
| S8 | 138.1 | 89.5 | 154.3 |
| S9 | 180.7 | 106.6 | 169.5 |
| S10 | 158.2 | 116.6 | 135.7 |
| mean ± std. | 153.2 ± 15.84 | 106.5 ± 12.84 | 144.8 ± 15.12 |
| Subject | Offline | Online | ||
|---|---|---|---|---|
| GvN | GvS | GvN | GvS | |
| S1 | 83.3 | 75.7 | 94.2 | 85.9 |
| S2 | 84.9 | 77.4 | 81.3 | 77.6 |
| S3 | 80.0 | 78.4 | 85.5 | 85.3 |
| S4 | 94.0 | 83.9 | 81.0 | 89.2 |
| S5 | 95.1 | 74.3 | 100 | 86.4 |
| S6 | 78.0 | 71.9 | 88.0 | 89.5 |
| S7 | 93.4 | 79.4 | 91.7 | 83.2 |
| S8 | 98.1 | 94.4 | 94.5 | 88.7 |
| S9 | 95.1 | 87.6 | 78.2 | 85.9 |
| S10 | 81.6 | 77.4 | 72.2 | 72.5 |
| Mean ± std. | 88.4 ± 7.48 | 80.3 ± 6.79 | 86.7 ± 8.61 | 84.4 ± 5.43 |
| Subject | Offline | Online |
|---|---|---|
| S1 | 1.86 | 2.99 |
| S2 | 3.51 | 2.59 |
| S3 | 2.71 | 3.05 |
| S4 | 3.80 | 3.31 |
| S5 | 2.39 | 3.54 |
| S6 | 2.24 | 2.23 |
| S7 | 2.31 | 3.64 |
| S8 | 6.37 | 3.16 |
| S9 | 4.80 | 3.96 |
| S10 | 2.07 | 2.80 |
| mean ± std. | 3.21 ± 1.442 | 3.13 ± 0.514 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, J.; Kim, K.T.; Jeong, J.H.; Kim, L.; Lee, S.J.; Kim, H. Developing a Motor Imagery-Based Real-Time Asynchronous Hybrid BCI Controller for a Lower-Limb Exoskeleton. Sensors 2020, 20, 7309. https://doi.org/10.3390/s20247309
Choi J, Kim KT, Jeong JH, Kim L, Lee SJ, Kim H. Developing a Motor Imagery-Based Real-Time Asynchronous Hybrid BCI Controller for a Lower-Limb Exoskeleton. Sensors. 2020; 20(24):7309. https://doi.org/10.3390/s20247309
Chicago/Turabian StyleChoi, Junhyuk, Keun Tae Kim, Ji Hyeok Jeong, Laehyun Kim, Song Joo Lee, and Hyungmin Kim. 2020. "Developing a Motor Imagery-Based Real-Time Asynchronous Hybrid BCI Controller for a Lower-Limb Exoskeleton" Sensors 20, no. 24: 7309. https://doi.org/10.3390/s20247309
APA StyleChoi, J., Kim, K. T., Jeong, J. H., Kim, L., Lee, S. J., & Kim, H. (2020). Developing a Motor Imagery-Based Real-Time Asynchronous Hybrid BCI Controller for a Lower-Limb Exoskeleton. Sensors, 20(24), 7309. https://doi.org/10.3390/s20247309