Cross-Axis Coupling Effects in Single-Axis Nuclear Magnetic Resonance Gyroscopes


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Theoretical Analysis
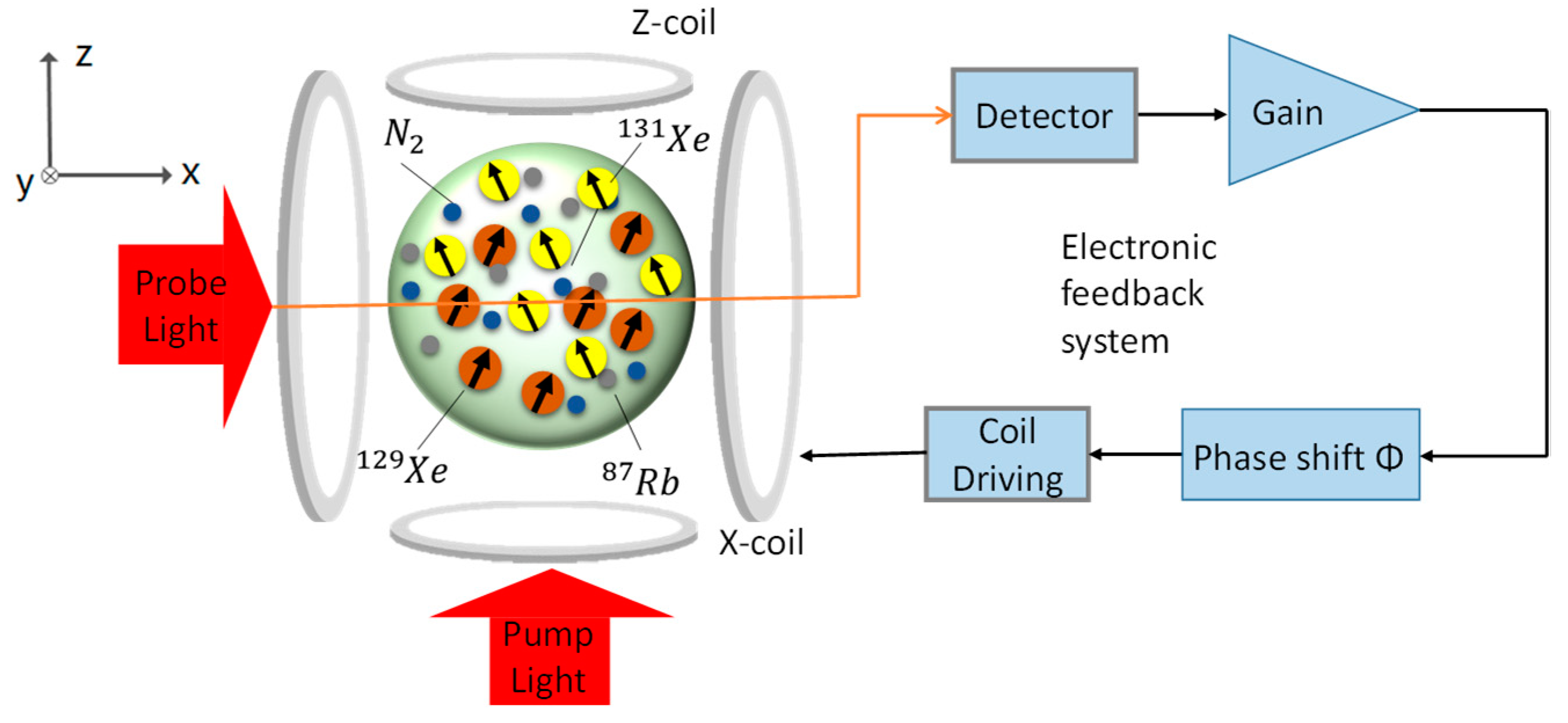
2.1. Principle of an NMRG
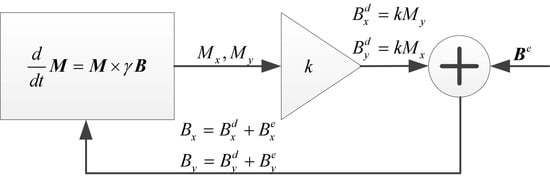
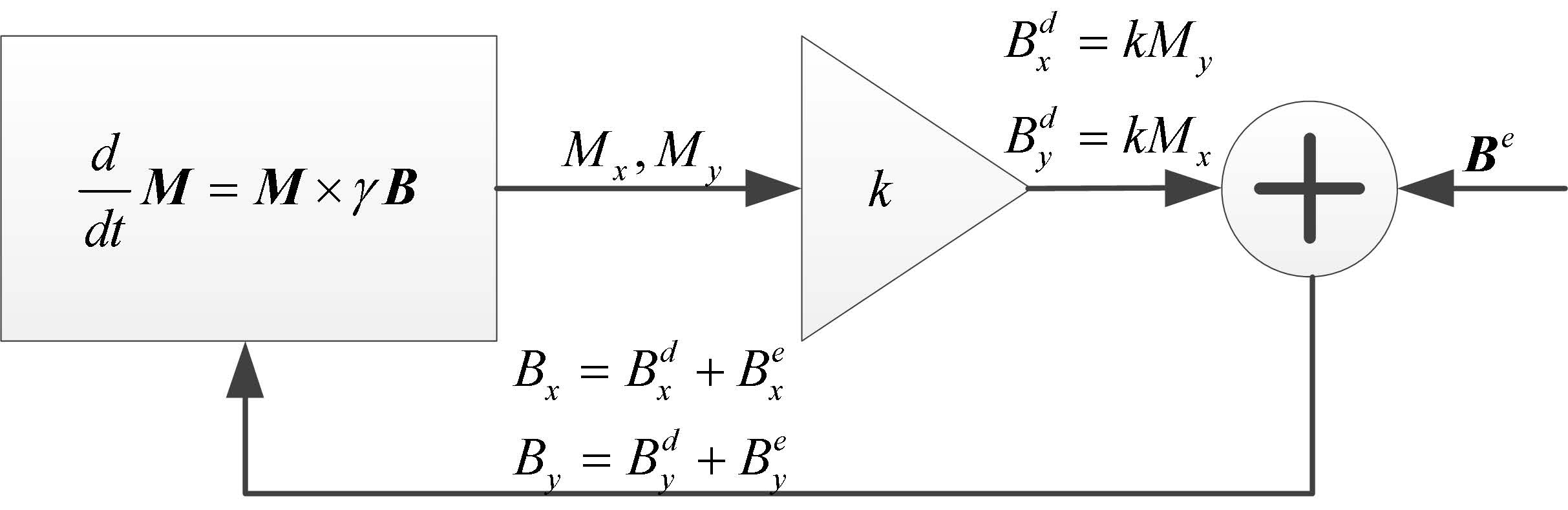
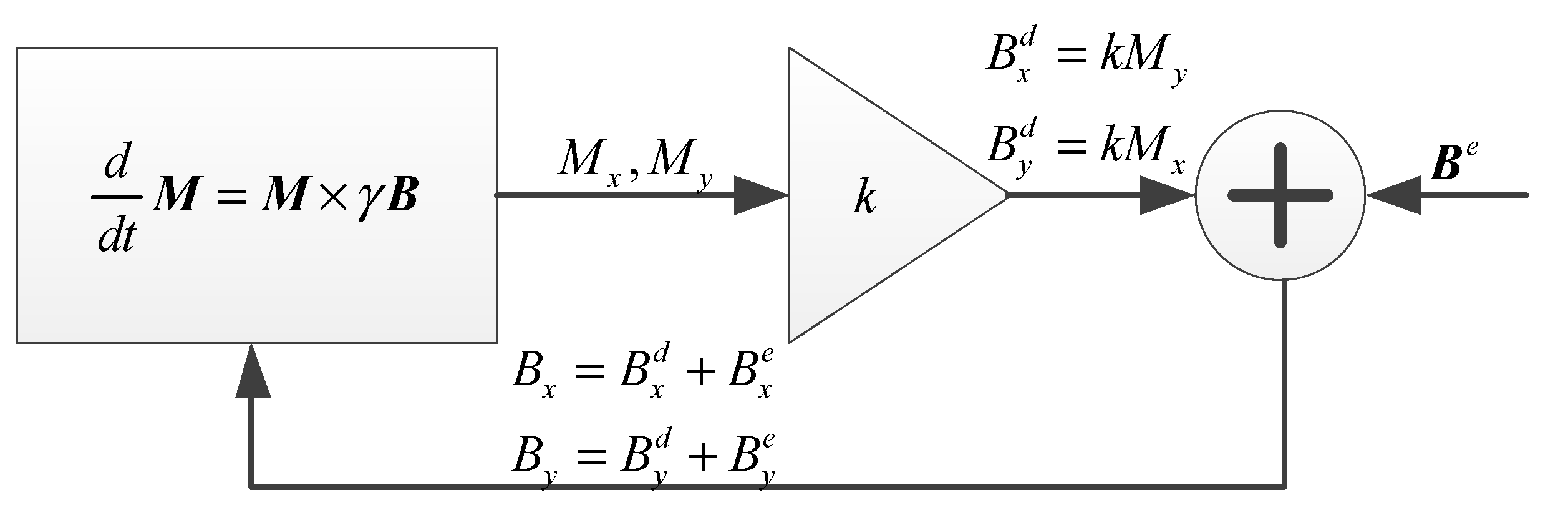
2.2. Modeling of a Spin Oscillator with a Cross-Axis-Rotation-Equivalent Magnetic Field
3. Numerical Simulation and Discussion
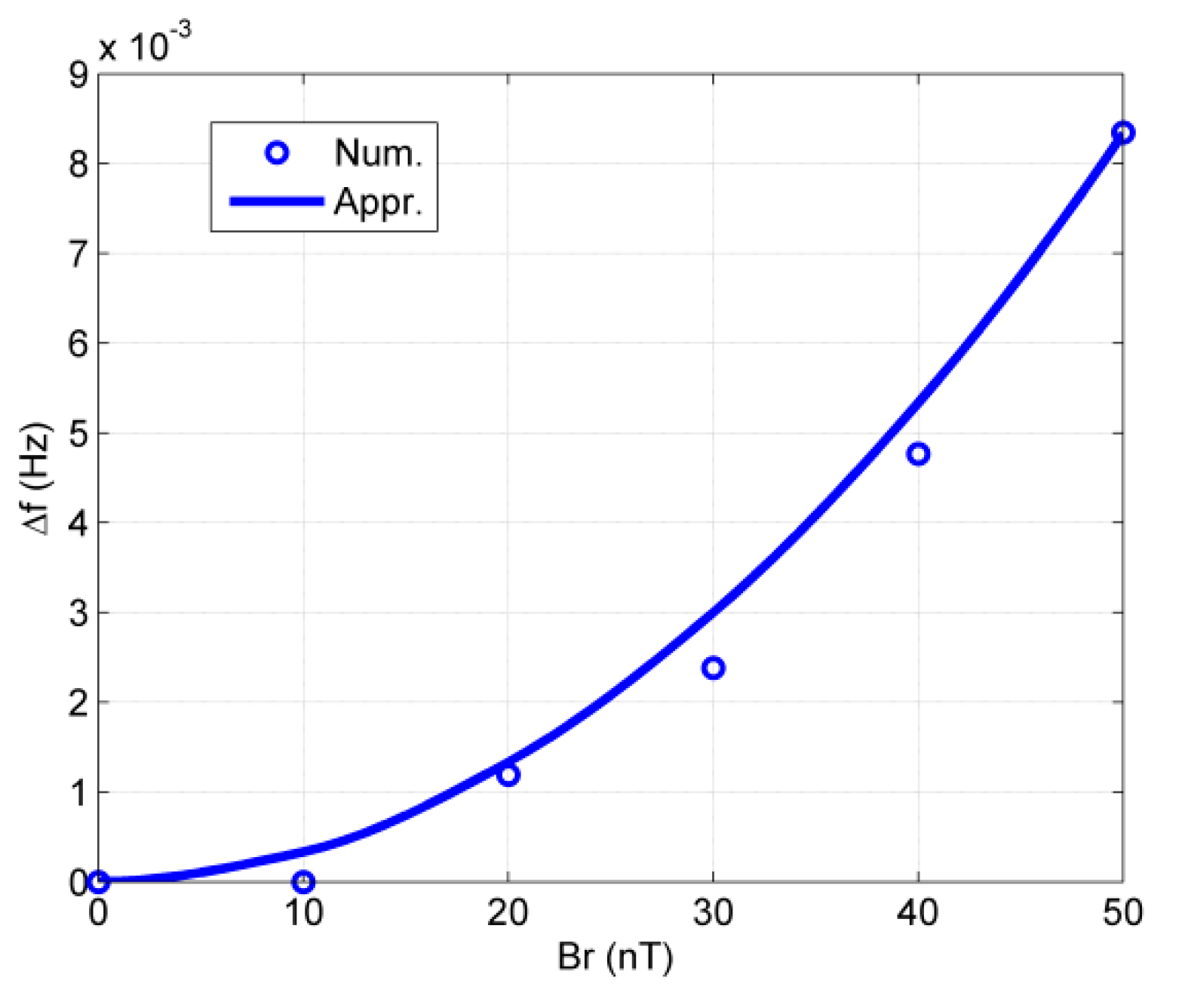
3.1. Frequency Shift due to a DC Magnetic Field
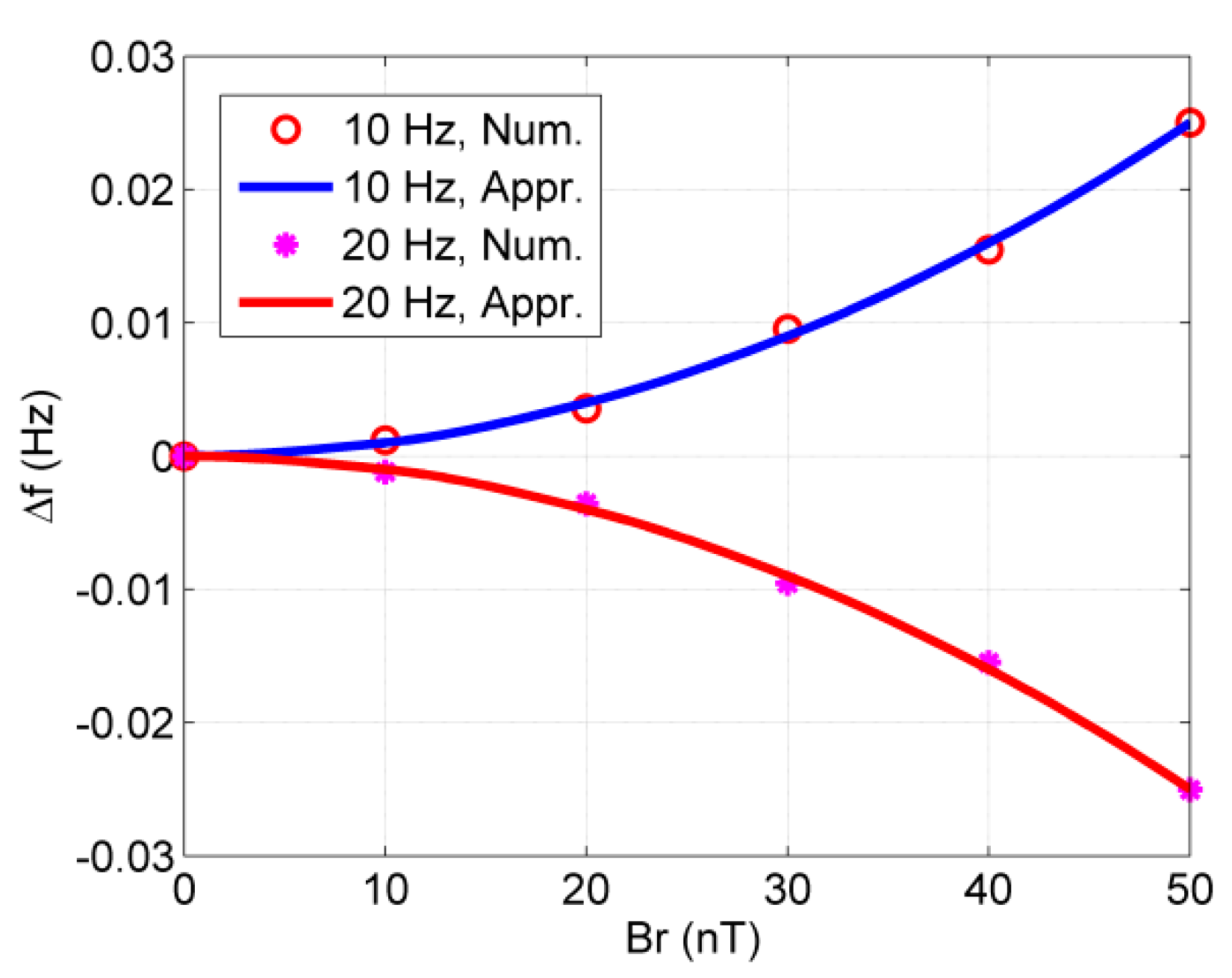
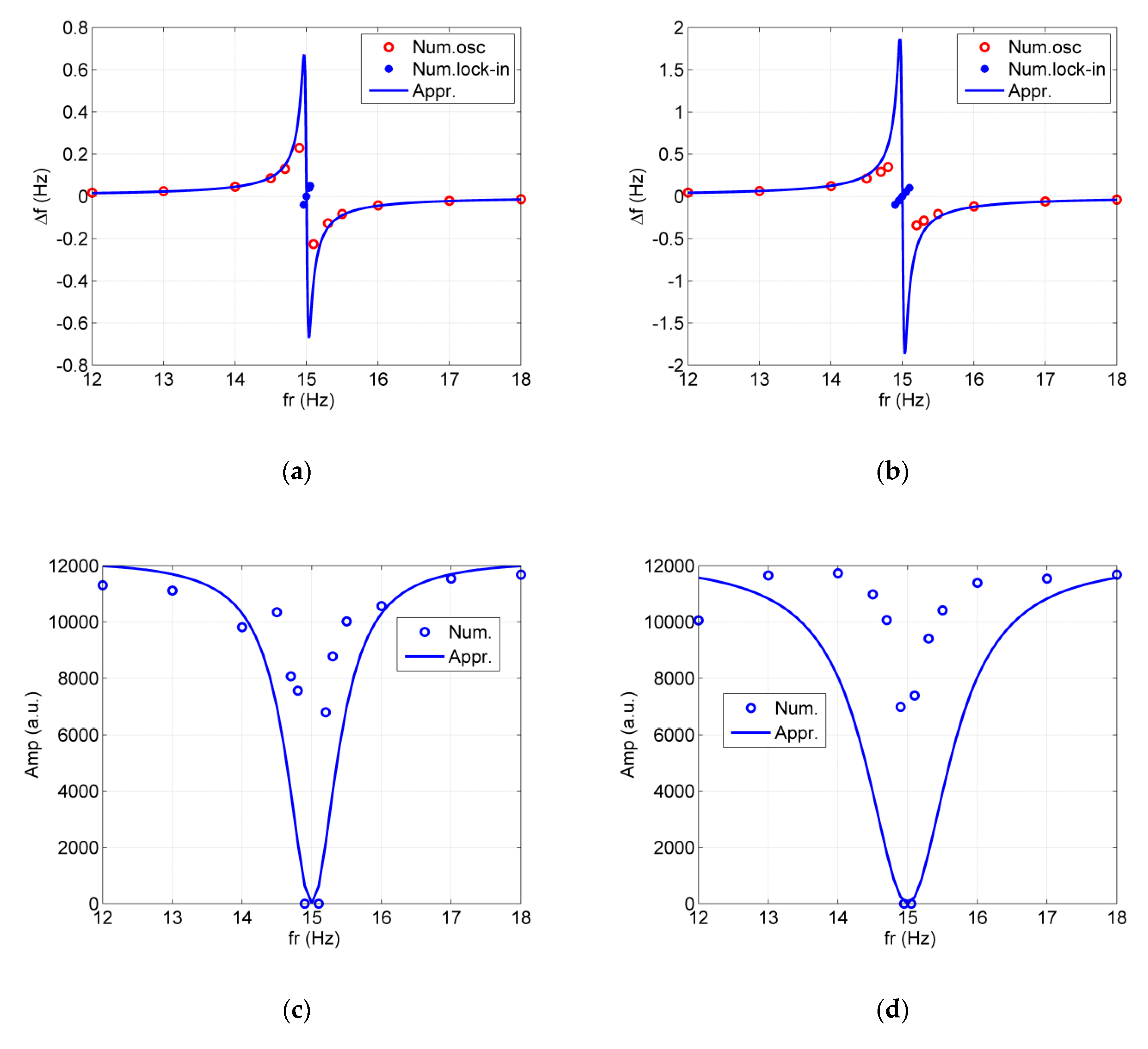
3.2. Frequency Shift due to an Oscillating Magnetic Field
3.2.1. One Component
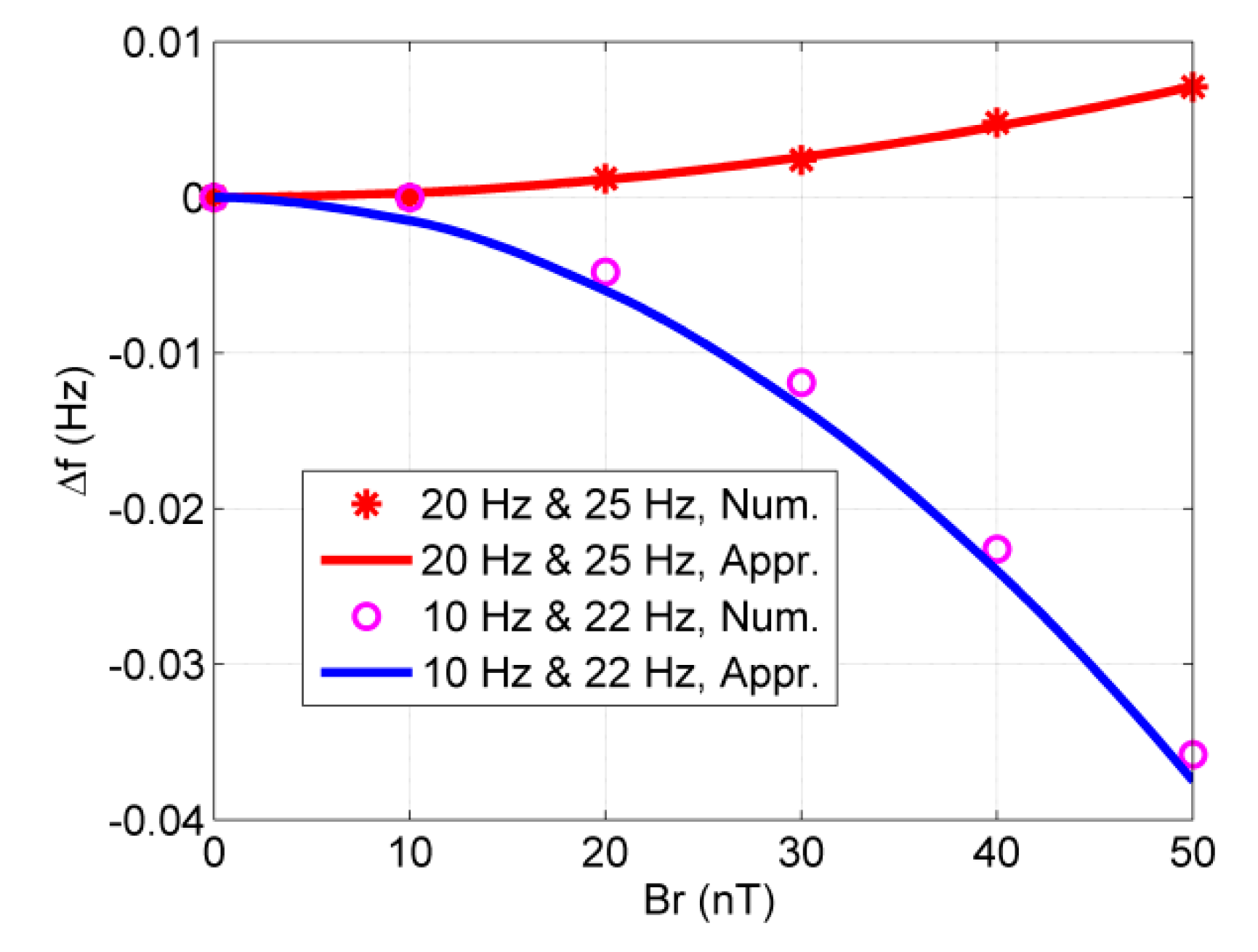
3.2.2. Two Harmonic Components
3.3. Discussions
3.3.1. Comparing the 3He Gyroscope with a Dual-isotope Xe NMRG
3.3.2. Methods to Reduce the Cross-Axis Effect
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Eklund, E.J. Microgyroscope Based on Spin-Polarized Nuclei. Ph.D. Thesis, University of California, Irvine, CA, USA, 2008. [Google Scholar]
- Walker, T.G.; Larsen, M.S. Spin-Exchange Pumped NMR Gyros. Adv. Atom. Mol. Opt. Phy. 2016, 65, 373–401. [Google Scholar]
- Larsen, M.; Bulatowicz, M. Nuclear magnetic resonance gyroscope. IEEE Freq. Control Symp. 2012, 978, 1–5. [Google Scholar]
- Donley, E. Nuclear magnetic resonance gyroscopes. In Proceedings of the SENSORS, 2010 IEEE, Kona, HI, USA, 1–4 November 2010. [Google Scholar]
- Meyer, D.; Larsen, M. Nuclear magnetic resonance gyro for inertial navigation. Gyroscopy Navig. 2014, 5, 75–82. [Google Scholar] [CrossRef]
- Woodman, K.F.; Franks, P.W.; Richards, M.D. The nuclear magnetic resonance gyroscope: A review. J. Navig. 1987, 40, 366–384. [Google Scholar] [CrossRef]
- Fang, J.C.; Qin, J. Advances in atomic gyroscopes: A view from inertial navigation applications. Sensors 2012, 12, 6331–6346. [Google Scholar] [CrossRef] [PubMed]
- Qin, J.; Wang, S.; Gao, P.; Wang, Y.; Han, W. Advances in nuclear magnetic resonance gyroscope. Navig. Positioning Timing 2014, 1, 64–69. [Google Scholar]
- Shaw, G.L. Sensitivity to cross-axis oscillations in a single-axis nuclear gyroscope. J. Guid. Control Dynam. 1984, 7, 501–502. [Google Scholar] [CrossRef]
- Shaw, G.L. 3He Nuclear Gyroscope. Available online: https://apps.dtic.mil/dtic/tr/fulltext/u2/a159924.pdf (accessed on 29 January 2020).
- Wang, Z.G.; Peng, X.; Luo, H.; Guo, H. Comparison of operation modes for spin-exchange optically-pumped spin oscillators. J. Magn. Reson. 2017, 278, 134–140. [Google Scholar] [CrossRef] [PubMed]
- Abragam, A. The Principles of Nuclear Magnetism; Oxford University Press: London, UK, 1961. [Google Scholar]
- Guerinoni, L.; Falorni, G.L.; Gattere, G. Modelling Cross Axis Sensitivity in MEMS Coriolis Vibratory Gyroscopes. Proceedings 2017, 1, 281. [Google Scholar] [CrossRef] [Green Version]
- Bulatowicz, M.; Griffith, R.; Larsen, M.; Mirijanian, J.; Fu, C.B.; Smith, E.; Snow, W.M.; Yan, H.; Walker, T.G. Laboratory search for a long-range T-Odd, P-Odd interaction from axionlike particles using dual-species nuclear magnetic resonance with polarized 129Xe and 131Xe gas. Phys. Rev. Lett. 2013, 111, 102001. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoshimi, A.; Asahi, K.; Sakai, K.; Tsuda, M.; Yogo, K.; Ogawa, H.; Suzuki, T.; Nagakura, M. Nuclear spin maser with an artificial feedback mechanism. Phys. Lett. A 2002, 304, 13–20. [Google Scholar] [CrossRef]
- Pendlebury, J.M.; Heil, W.; Sobolev, Y.; Harris, P.G.; Richardson, J.D.; Baskin, R.J.; Doyle, D.D.; Geltenbort, P.; Green, K.; van der Grinten, M.G.D.; et al. Geometric-phase-induced false electric dipole moment signals for particles in traps. Phy. Rev. A 2008, 70, 32102. [Google Scholar] [CrossRef] [Green Version]
- Bloch, F.; Siegert, A. Magnetic resonance for nonrotating fields. Phy. Rev. 1940, 57, 522–527. [Google Scholar] [CrossRef]
- Ramsey, N.F. Resonance transitions induced by perturbations at two or more different frequencies. Phys. Rev. 1955, 100, 1191–1194. [Google Scholar]
- Pavlov, Y.V.; Pivkin, A.N.; Umarkhodzhaev, R.M.; Lariontsev, E.G. Synchronization with harmonics in an injected nuclear-magnetic-resonance laser. Phy. Rev. A 2010, 82, 33802. [Google Scholar] [CrossRef]
- Chow, W.W.; Gea-Banacloche, J.; Pedrotti, L.M.; Sanders, V.E.; Schleich, W.; Scully, M.O. The ring laser gyro. Rev. Mod. Phys. 1985, 57, 61–103. [Google Scholar] [CrossRef]
- Krobka, N.I.; Türkin, D.A. Laser gyros frequency biasing and fiber optic gyros phase biasing: Similarities and differences. In Proceedings of the 2017 24th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), St. Petersburg, Russia, 29–31 May 2017. [Google Scholar]
- Grover, B.C.; Kanegsberg, E.; Mark, J.G.; Meyer, R.L. Nuclear Magnetic Resonance Gyro. U.S. Patent 4,157,495, 5 June 1979. [Google Scholar]
- Lee, J.P.; Whaley, W. Prediction of the angular vibration of aircraft structures. J. Sound Vib. 1976, 49, 541–549. [Google Scholar] [CrossRef]
- Merritt, P.; Donaldson, J.; O’Brien, D.; Coleman, K.; Pyles, G. Angular vibration survey of various aircraft. In Proceedings of the Laser Systems Technology, Orlando, FL, USA, 21–25 April 2003. [Google Scholar]






© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Zhang, Y.; Zhan, X.; Jiang, Q.; Luo, H. Cross-Axis Coupling Effects in Single-Axis Nuclear Magnetic Resonance Gyroscopes. Sensors 2020, 20, 734. https://doi.org/10.3390/s20030734
Wang Z, Zhang Y, Zhan X, Jiang Q, Luo H. Cross-Axis Coupling Effects in Single-Axis Nuclear Magnetic Resonance Gyroscopes. Sensors. 2020; 20(3):734. https://doi.org/10.3390/s20030734
Chicago/Turabian StyleWang, Zhiguo, Yi Zhang, Xiang Zhan, Qiyuan Jiang, and Hui Luo. 2020. "Cross-Axis Coupling Effects in Single-Axis Nuclear Magnetic Resonance Gyroscopes" Sensors 20, no. 3: 734. https://doi.org/10.3390/s20030734
APA StyleWang, Z., Zhang, Y., Zhan, X., Jiang, Q., & Luo, H. (2020). Cross-Axis Coupling Effects in Single-Axis Nuclear Magnetic Resonance Gyroscopes. Sensors, 20(3), 734. https://doi.org/10.3390/s20030734