IoT Based Architecture for Model Predictive Control of HVAC Systems in Smart Buildings





Abstract
:1. Introduction
2. Related Works and Paper Contributions
- We propose a dynamic energy and thermal comfort controller based on the MPC technique, which selects the most efficient configuration of HVAC system that satisfies the users’ needs. More in detail, we formulate an optimization problem of HVAC control based on a simplified thermal model of a single zone environment and on a linearized version of the non-linear Fanger’s PMV index representative of the users thermal comfort. Differently from the state of the art, our energy and thermal comfort control approach both considers the constraints on comfort as a penalty term in the objective function and takes into account the eventual physical limitations of the real system (e.g., physical limitations of the actuators or of the HVAC system), thus ensuring the feasibility of both the optimization problem and control action implementation. This results in a quadratic optimization problem formulation that aims at simultaneously maximizing the users’ thermal comfort, the energy efficiency of the HVAC system, and the smoothness of the control action, while minimizing the comfort limits violations.
- We propose a general IoT based control architecture that can be easily implemented in a real smart building environment for the HVAC system control. Contrary to the existing contributions, which consider closed systems using local networks, our IoT based approach allows the implementation of a smart control system where the sensors, actuators, and control unit are connected to the Internet and can take advantage of the functionalities of external database servers and API. Moreover, an end-user device also connected to the internet allows the interaction of the building occupants with the control system by means of a user friendly dashboard.
- We present a real IoT based control architecture test bed to evaluate the performance of the proposed approach, demonstrating the potential financial and comfort gains that can be achieved and the effectiveness of the method in the real-time control environment in a proof of concept perspective. In this work, differently from the state of the art that exclusively focuses on the control algorithm implementation or on the system architecture definition, we provide the description of the HVAC control architecture as a whole for practical use in a real environment.
3. IoT based Control System Architecture
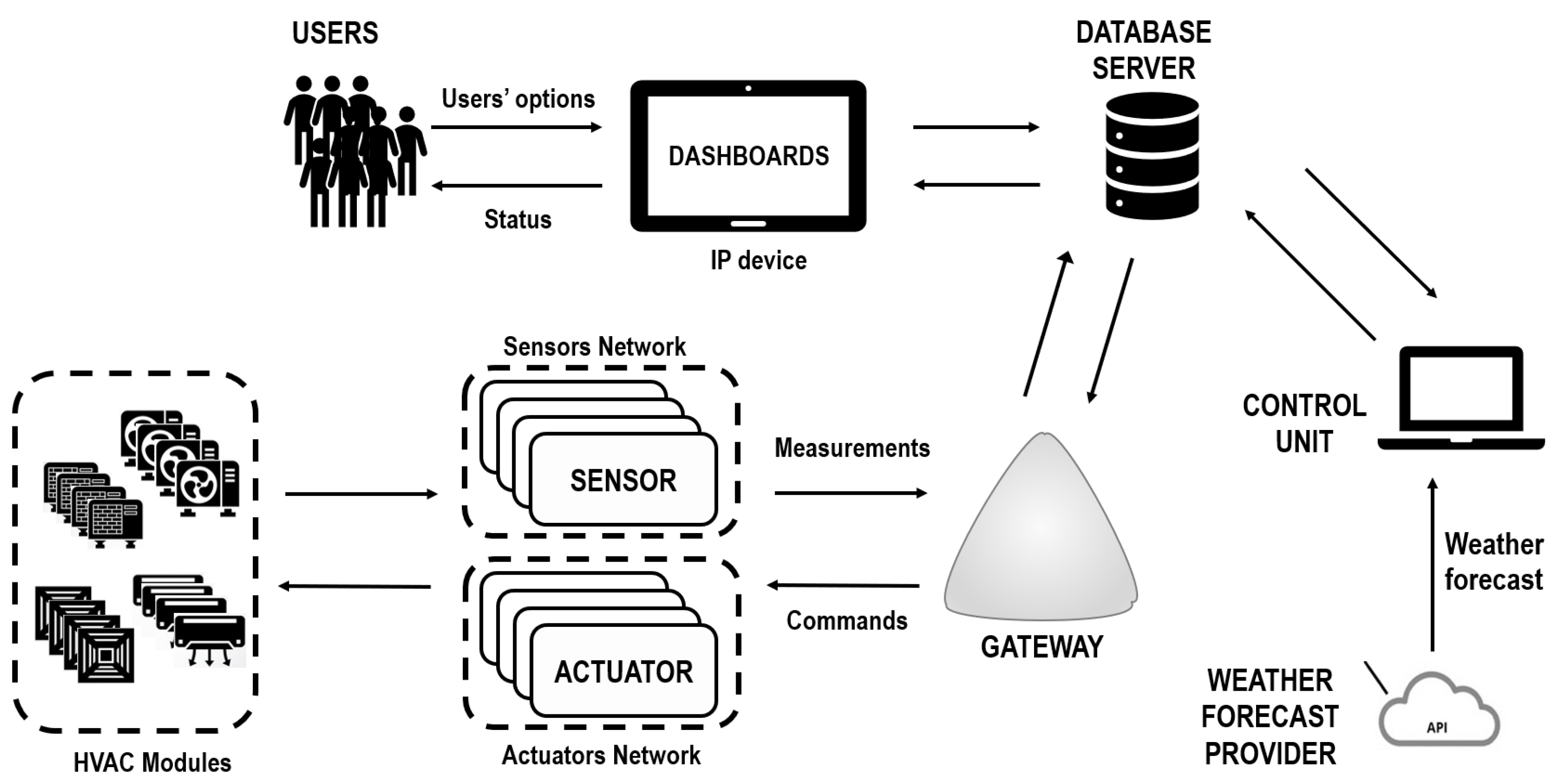
3.1. System Architecture
- a net of sensors that perceives the environmental conditions and sends measurements to a gateway;
- a set of HVAC modules;
- a net of actuators that control the HVAC modules and communicate with the gateway;
- a gateway that connects the nets of sensors and actuators to the Internet;
- an external Application programming interface (API) that provides forecasts of the weather conditions;
- an external database server that collects/forwards data from/to the field and from/to the control unit;
- a control unit that communicates with the database server and where the MPC algorithm is executed;
- an IP device that acts as end-user interface that is connected to the database server and hosts a dashboard dedicated to monitoring the state of the environment and setting the control system mode.
3.2. The Thermal Model of a Building Single Zone Environment
4. The Control Algorithm
4.1. Thermal Comfort Assessment by PMV
- Energy metabolism M—for sedentary activities in offices or housing it is equal to 70,
- Thermal insulation of clothing —it is the sum of a term corresponding to work clothing (for office) equal to 0.14 and the thermal insulation of a typical chair equal to 0.016 ;
- Area coefficient of clothing —for the value chosen above, the second of the formulas in Equation (7) must be considered, that is = 1.05 + 0.645;
- Effective mechanical power W—for sedentary activities it can be assumed equal to zero;
- Average radiant temperature —with good approximation it is assumed the same as air temperature, which happens in latest generation buildings;
- Air speed —as explained in [28] the air velocity in moderate work environments should be kept in the interval 0.15 ÷ 0.25 [ms] and it can be considered constant and equal to 0.1 [ms].
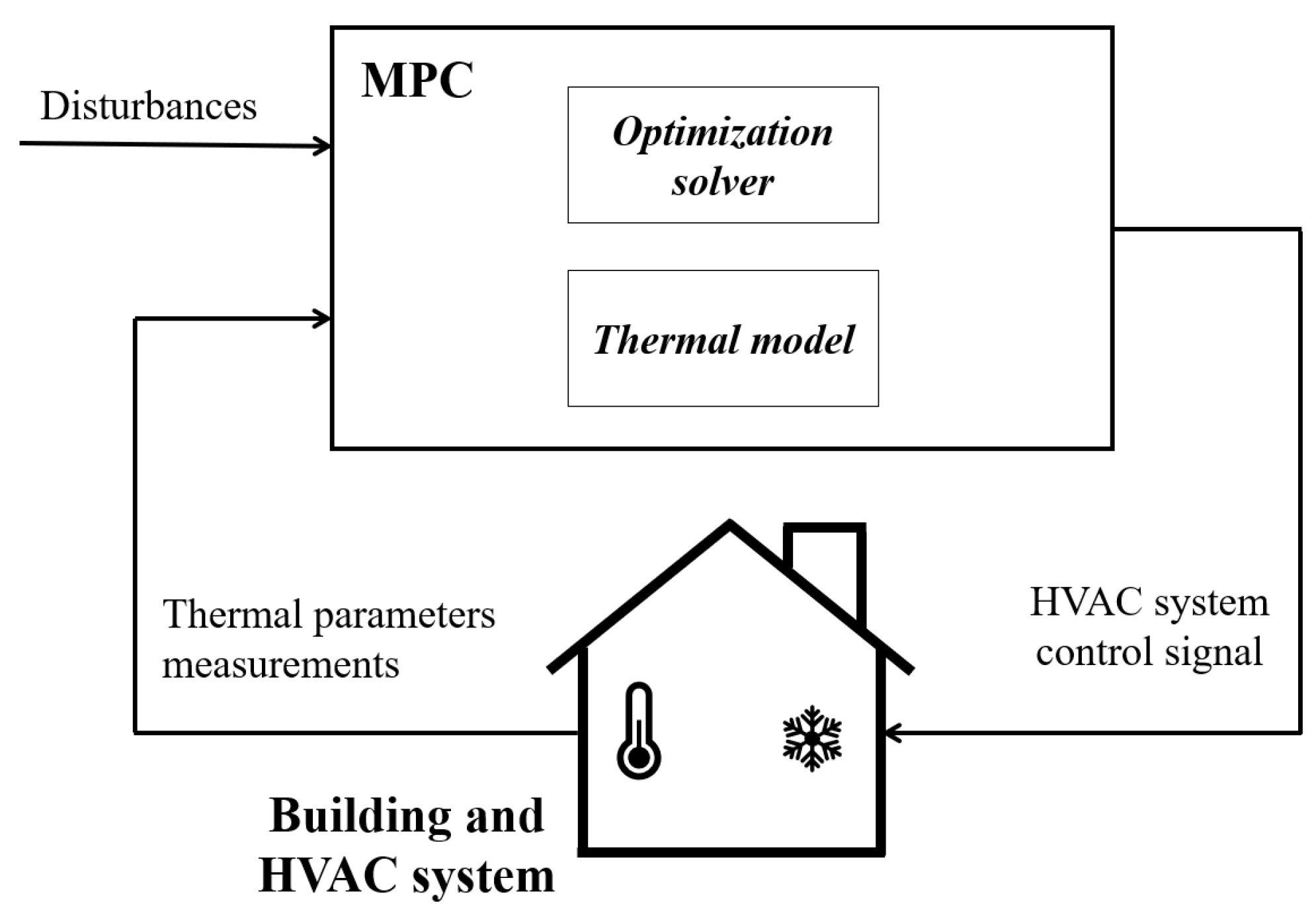
4.2. Model Predictive Control
4.3. The Optimization Problem
- The slack variable takes into account the case when the exceeds the occupant-defined above, whilst it is zero otherwise. Similarly, the slack variable takes into account the case when the exceeds the occupant-defined below, whilst it is zero otherwise.
- The objective function of Equation (15) contains an additional term with respect to Equation (14) that is weighted by the constant . This term represents a penalty to be added in case of violation of the bounds. More in detail, based on the definition of the two slack variables, the fourth term of the objective function in Equation (15) is straightforwardly the sum of the squares of and .
- The first two constraints impose the two slack variables to be non-negative; whereas the second two constraints impose the slack variables to be higher than or equal to the excess of the thermal comfort with respect to its limits.
5. Case Study
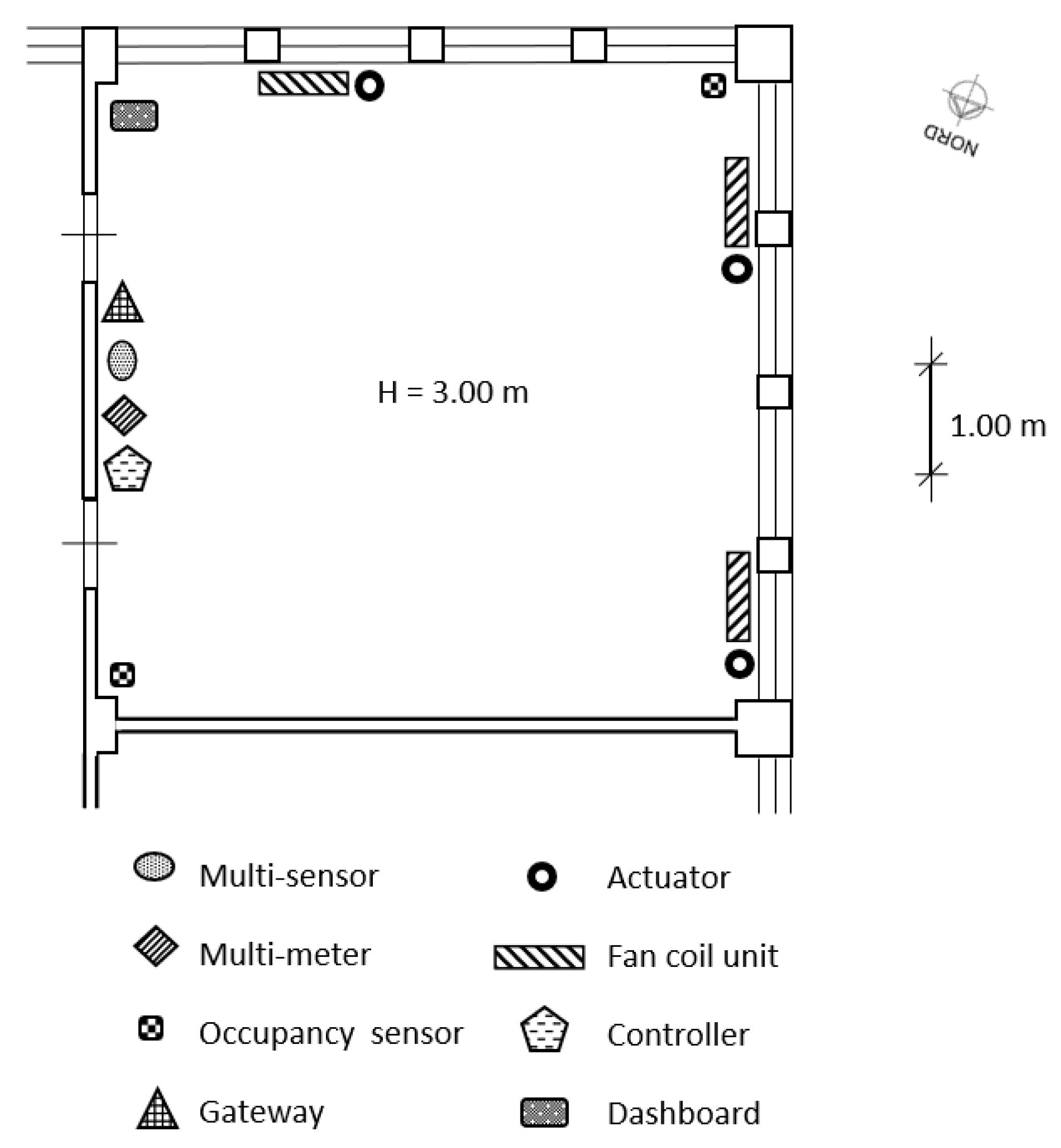
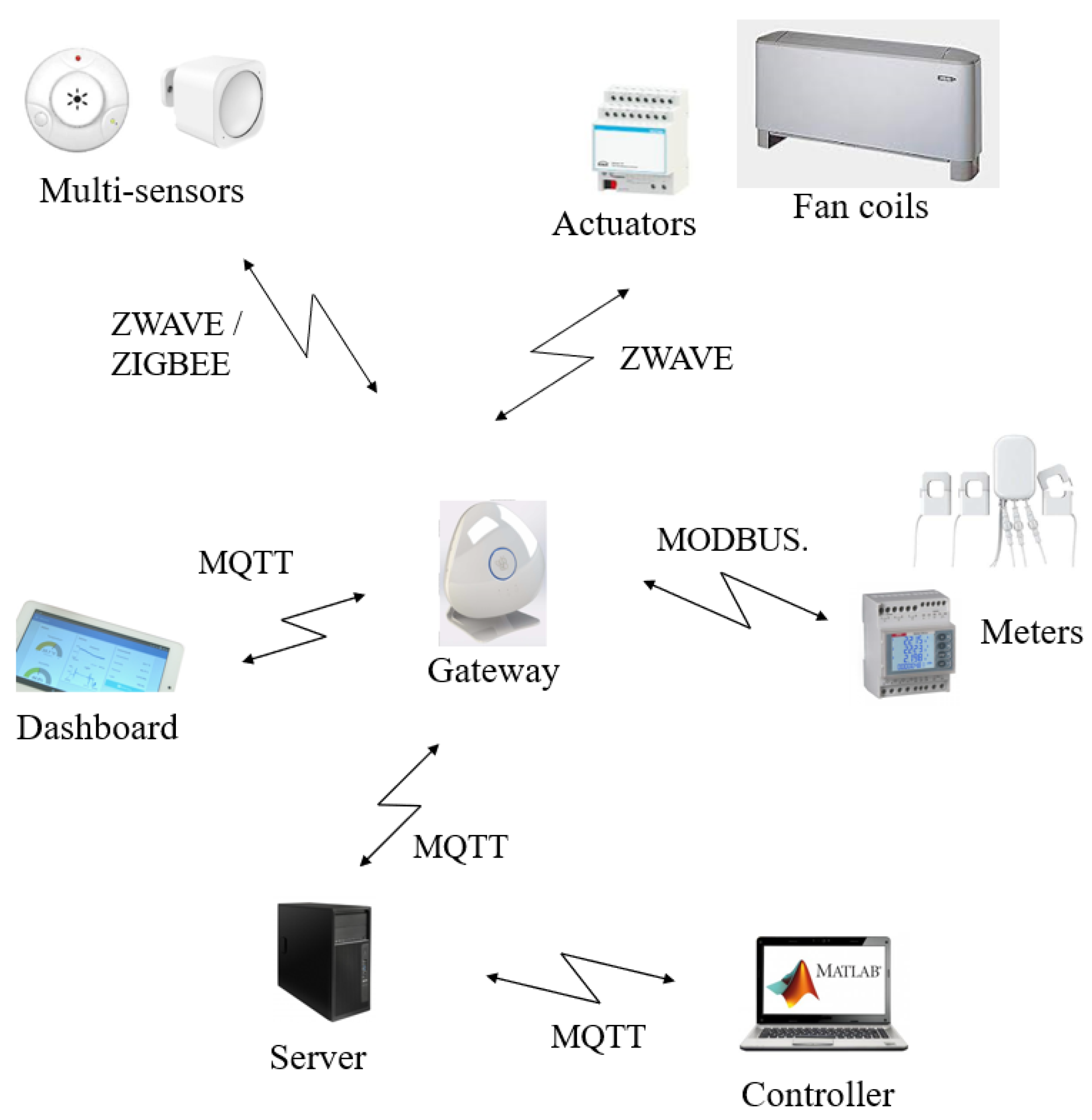
5.1. System Set-Up and Architecture
5.2. Results Analysis and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ejaz, W.; Naeem, M.; Shahid, A.; Anpalagan, A.; Jo, M. Efficient energy management for the internet of things in smart cities. IEEE Commun. Mag. 2017, 55, 84–91. [Google Scholar] [CrossRef] [Green Version]
- Digiesi, S.; Mossa, G.; Mummolo, G. Supply lead time uncertainty in a sustainable order quantity inventory model. Manag. Prod. Eng. Rev. 2013, 4, 15–27. [Google Scholar] [CrossRef] [Green Version]
- Facchini, F.; Mummolo, G.; Mossa, G.; Digiesi, S.; Boenzi, F.; Verriello, R. Minimizing the carbon footprint of material handling equipment: Comparison of electric and LPG forklifts. J. Ind. Eng. Manag. 2016, 9, 1035–1046. [Google Scholar] [CrossRef] [Green Version]
- Dean, B.; Dulac, J.; Petrichenko, K.; Graham, P. Towards Zero-Emission Efficient and Resilient Buildings: Global Status Report. 2016. Available online: https://backend.orbit.dtu.dk/ws/portalfiles/portal/127199228/GABC_Global_Status_Report_V09_november.pdf (accessed on 1 December 2019).
- Carli, R.; Dotoli, M.; Pellegrino, R.; Ranieri, L. A decision making technique to optimize a buildings’ stock energy efficiency. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 794–807. [Google Scholar] [CrossRef]
- Jouhara, H.; Yang, J. Energy efficient HVAC systems. Energy Build. 2018, 179, 83–85. [Google Scholar] [CrossRef]
- Afram, A.; Janabi-Sharifi, F. Theory and applications of HVAC control systems—A review of model predictive control (MPC). Build. Environ. 2014, 72, 343–355. [Google Scholar] [CrossRef]
- Talarico, C.; D’Amato, G.; Coviello, G.; Avitabile, G. A high precision phase control unit for DDS-based PLLs for 2.4-GHz ISM band applications. In Proceedings of the 2015 IEEE 58th International Midwest Symposium on Circuits and Systems (MWSCAS), Fort Collins, CO, USA, 2–5 May 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Casalino, G.; Castellano, G.; Mencar, C. Data Stream Classification by Dynamic Incremental Semi-Supervised Fuzzy Clustering. Int. J. Artif. Intell. Trans. 2019, 28, 1960009. [Google Scholar] [CrossRef]
- Serale, G.; Fiorentini, M.; Capozzoli, A.; Bernardini, D.; Bemporad, A. Model Predictive Control (MPC) for enhancing building and HVAC system energy efficiency: Problem formulation, applications and opportunities. Energies 2018, 11, 631. [Google Scholar] [CrossRef] [Green Version]
- Serra, J.; Pubill, D.; Antonopoulos, A.; Verikoukis, C. Smart HVAC control in IoT: Energy consumption minimization with user comfort constraints. Sci. World J. 2014, 2014, 161874. [Google Scholar] [CrossRef] [Green Version]
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Wu, F.; Rüdiger, C.; Yuce, M. Real-time performance of a self-powered environmental IoT sensor network system. Sensors 2017, 17, 282. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hazyuk, I.; Ghiaus, C.; Penhouet, D. Optimal temperature control of intermittently heated buildings using Model Predictive Control: Part II—Control algorithm. Build. Environ. 2012, 51, 388–394. [Google Scholar] [CrossRef]
- Klaučo, M.; Drgoňa, J.; Kvasnica, M.; Di Cairano, S. Building temperature control by simple mpc-like feedback laws learned from closed-loop data. IFAC Proc. Vol. 2014, 47, 581–586. [Google Scholar] [CrossRef] [Green Version]
- Klaučo, M.; Kvasnica, M. Explicit MPC approach to PMV-based thermal comfort control. In Proceedings of the 53rd IEEE conference on decision and control (CDC), Los Angeles, CA, USA, 15–17 December 2014; pp. 4856–4861. [Google Scholar] [CrossRef]
- International Organization for Standardization. ISO 7730: Ergonomics of the Thermal Environment—Analytical Determination and Interpretation of Thermal Comfort Using Calculation of the PMV and PPD Indices and Local Thermal Comfort Criteria; ISO: Geneva, Switzerland, 2005; p. 60. [Google Scholar]
- Fanger, P.O. Thermal Comfort: Analysis and Application in Environment Engineering; Danish Technical Press: Copenhagen, Denmark, 1970; p. 244. [Google Scholar]
- Shaikh, P.H.; Nor, N.B.M.; Nallagownden, P.; Elamvazuthi, I.; Ibrahim, T. A review on optimized control systems for building energy and comfort management of smart sustainable buildings. Renew. Sustain. Energy Rev. 2014, 34, 409–429. [Google Scholar] [CrossRef]
- Xu, Z.; Hu, G.; Spanos, C.J.; Schiavon, S. PMV-based event-triggered mechanism for building energy management under uncertainties. Energy Build. 2017, 152, 73–85. [Google Scholar] [CrossRef] [Green Version]
- Alamin, Y.I.; Del Mar Castilla, M.; Álvarez, J.D.; Ruano, A. An economic model-based predictive control to manage the users’ thermal comfort in a building. Energies 2017, 10, 321. [Google Scholar] [CrossRef]
- Cigler, J.; Prívara, S.; Váňa, Z.; Žáčeková, E.; Ferkl, L. Optimization of predicted mean vote index within model predictive control framework: Computationally tractable solution. Energy Build. 2012, 52, 39–49. [Google Scholar] [CrossRef]
- Corbin, C.D.; Henze, G.P.; May-Ostendorp, P. A model predictive control optimization environment for real-time commercial building application. J. Build. Perform. Simu. 2013, 6, 159–174. [Google Scholar] [CrossRef]
- Ascione, F.; Bianco, N.; De Stasio, C.; Mauro, G.M.; Vanoli, G.P. Simulation-based model predictive control by the multi-objective optimization of building energy performance and thermal comfort. Energy Build. 2016, 111, 131–144. [Google Scholar] [CrossRef]
- Carli, R.; Cavone, G.; Dotoli, M.; Epicoco, N.; Scarabaggio, P. Model predictive control for thermal comfort optimization in building energy management systems. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 2608–2613. [Google Scholar] [CrossRef]
- Ramanathan, B.; Vittal, V. A Framework for Evaluation of Advanced Direct Load Control With Minimum Disruption. IEEE Trans. Power Syst. 2008, 23, 1681–1688. [Google Scholar] [CrossRef]
- ASHRAE Handbook: HVAC Systems and Equipment; American Society of Heating, Refrigerating, and Air Conditioning Engineers: Atlanta, GA, USA, 1996; pp. 1–10.
- Rode, C.; Peuhkuri, R.H.; Mortensen, L.H.; Hansen, K.K.; Time, B.; Gustavsen, A.; Ojanen, T.; Ahonen, J.; Svennberg, K.; Arfvidsson, J.; et al. Moisture Buffering of Building Materials; BYG DTU-126 Report; Department of Civil Engineering, Technical University of Denmark: Lyngby, Denmark, 2005; Available online: https: //backend.orbit.dtu.dk/ws/portalfiles/portal/2415500/byg-r126.pdf (accessed on 10 October 2019).
- Srinivas, J. Compr. Handbook of Mechanical Engineering; Laxmi Publication: New Delhi, India, 2004. [Google Scholar]
- Murray, F.W. On the Computation of Saturation Vapor Pressure; Technical Report; Rand Corp.: Santa Monica, CA, USA, 1966. [Google Scholar] [CrossRef]
- Pippia, T.; Sijs, J.; De Schutter, B. A Parametrized Model Predictive Control Approach for Microgrids. In Proceedings of the IEEE Conference on Decision and Control, 2019, Miami, FL, USA, 17–19 December 2018; pp. 3171–3176. [Google Scholar] [CrossRef]
- García, C.E.; Prett, D.M.; Morari, M. Model predictive control: Theory and practice-A survey. Automatica 1989, 25, 335–348. [Google Scholar] [CrossRef]
- TeraSrl. Beeta Home Page. Available online: https://www.beeta.it/en/ (accessed on 15 November 2019).
- Singh, M.; Rajan, M.A.; Shivraj, V.L.; Balamuralidhar, P. Secure MQTT for Internet of Things (IoT). In Proceedings of the 2015 5th International Conference on Communication Systems and Network Technologies (CSNT), Gwalior, India, 4–6 April 2015; pp. 746–751. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description | Unit |
|---|---|---|
| M | Energy metabolism | |
| W | Effective mechanical power | |
| Thermal insulation of clothing | ||
| Air coefficient of clothing | dimensionless | |
| T | Indoor air temperature | °C |
| Average radiant temperature | °C | |
| Relative air speed | ||
| Partial pressure of water vapor in the air | Pa | |
| Coefficient of heat exchange by convection | ||
| Surface temperature of clothing | °C |
| Type of Control Systems | Period of Analysis | Average Daily Energy Consumption [kWh] | Comfort Satisfaction during Working Time [%] |
|---|---|---|---|
| Programmable thermostats | from mid-May 2018 to mid-September 2018 | 16.74 | 75.1 |
| MPC | from mid-May 2019 to mid-September 2019 | 13.63 | 95.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carli, R.; Cavone, G.; Ben Othman, S.; Dotoli, M. IoT Based Architecture for Model Predictive Control of HVAC Systems in Smart Buildings. Sensors 2020, 20, 781. https://doi.org/10.3390/s20030781
Carli R, Cavone G, Ben Othman S, Dotoli M. IoT Based Architecture for Model Predictive Control of HVAC Systems in Smart Buildings. Sensors. 2020; 20(3):781. https://doi.org/10.3390/s20030781
Chicago/Turabian StyleCarli, Raffaele, Graziana Cavone, Sarah Ben Othman, and Mariagrazia Dotoli. 2020. "IoT Based Architecture for Model Predictive Control of HVAC Systems in Smart Buildings" Sensors 20, no. 3: 781. https://doi.org/10.3390/s20030781
APA StyleCarli, R., Cavone, G., Ben Othman, S., & Dotoli, M. (2020). IoT Based Architecture for Model Predictive Control of HVAC Systems in Smart Buildings. Sensors, 20(3), 781. https://doi.org/10.3390/s20030781