An Acquisition Method of Agricultural Equipment Roll Angle Based on Multi-Source Information Fusion


 ,
,
Abstract
:1. Introduction
2. Materials and Methods
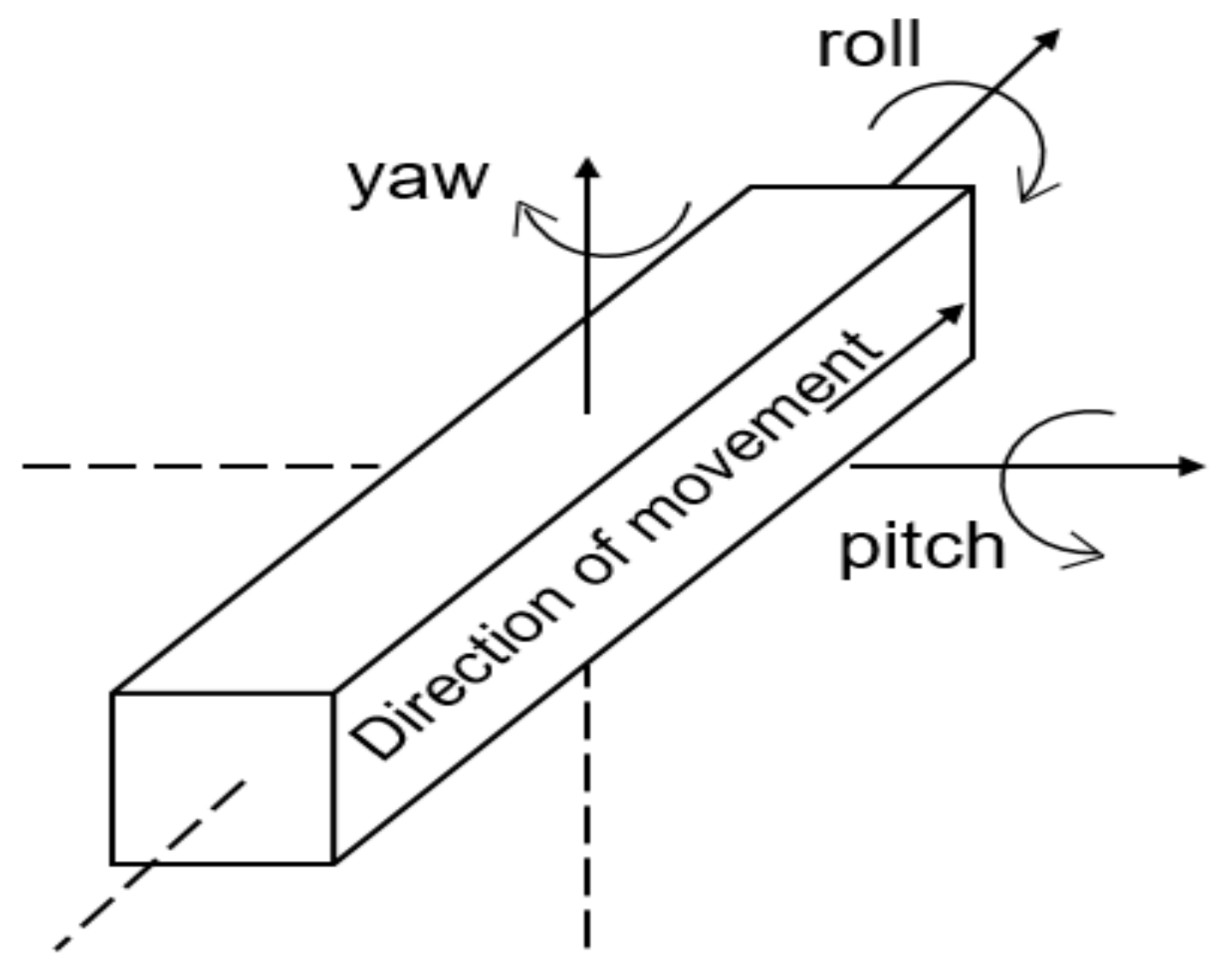
2.1. Definition of Three-Dimensional Attitude Angles
2.2. INS and Performances
2.3. BDS and Performances
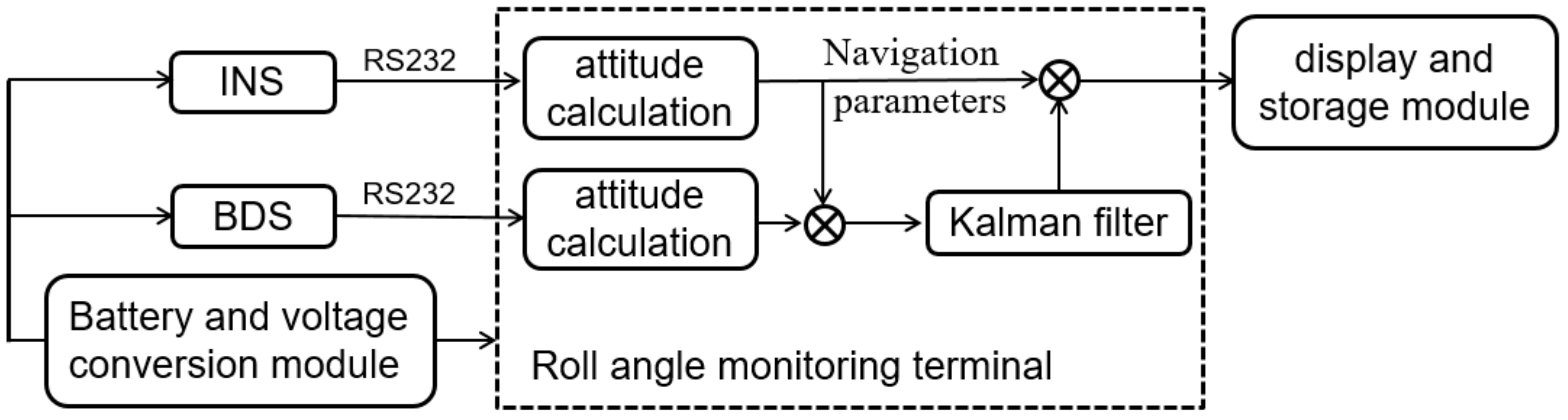
2.4. Fused Monitoring of the INS and BDS
2.5. Implementation of the INS and BDS Integrated Algorithm
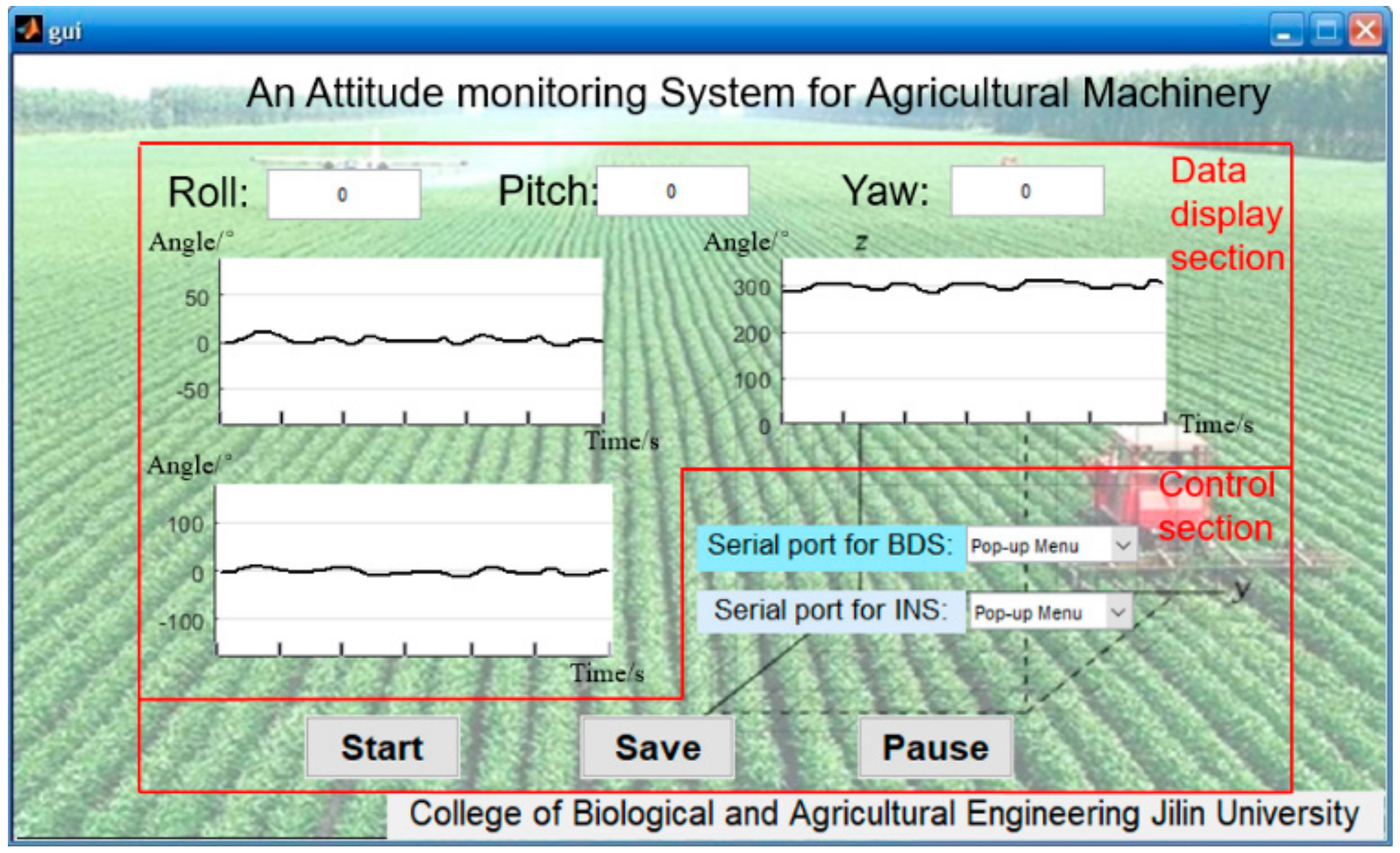
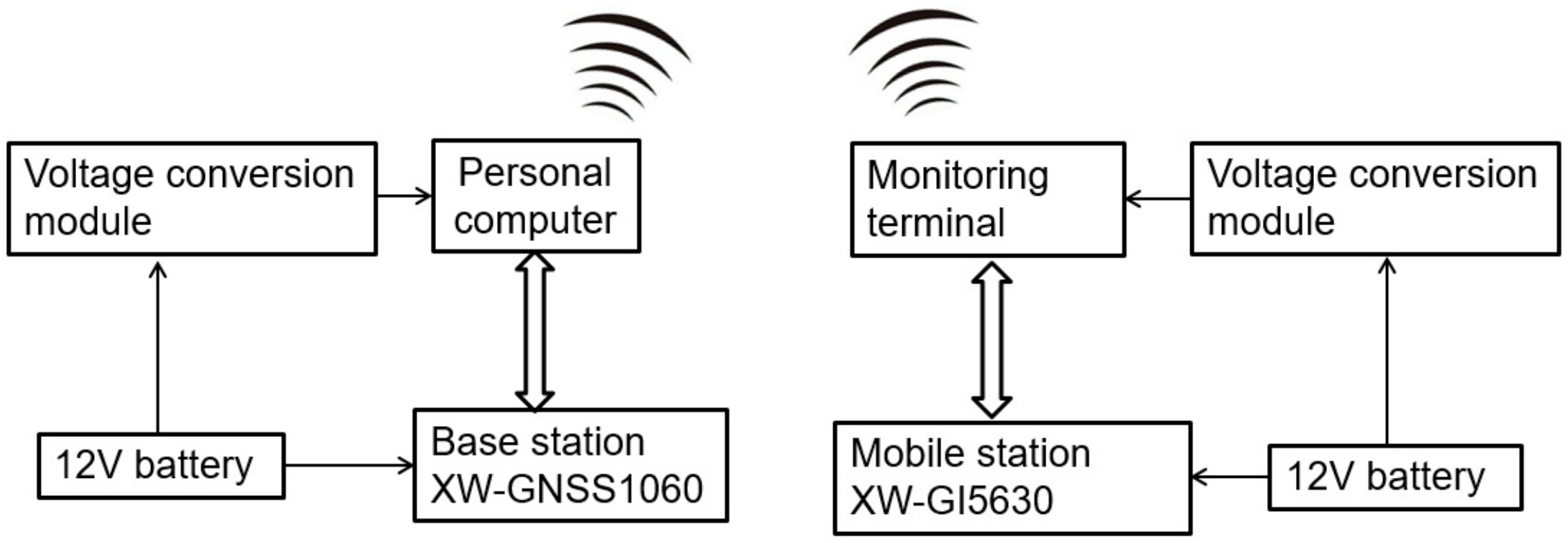
2.6. Design of Fusion Monitoring Terminal
3. Experiments and Analysis
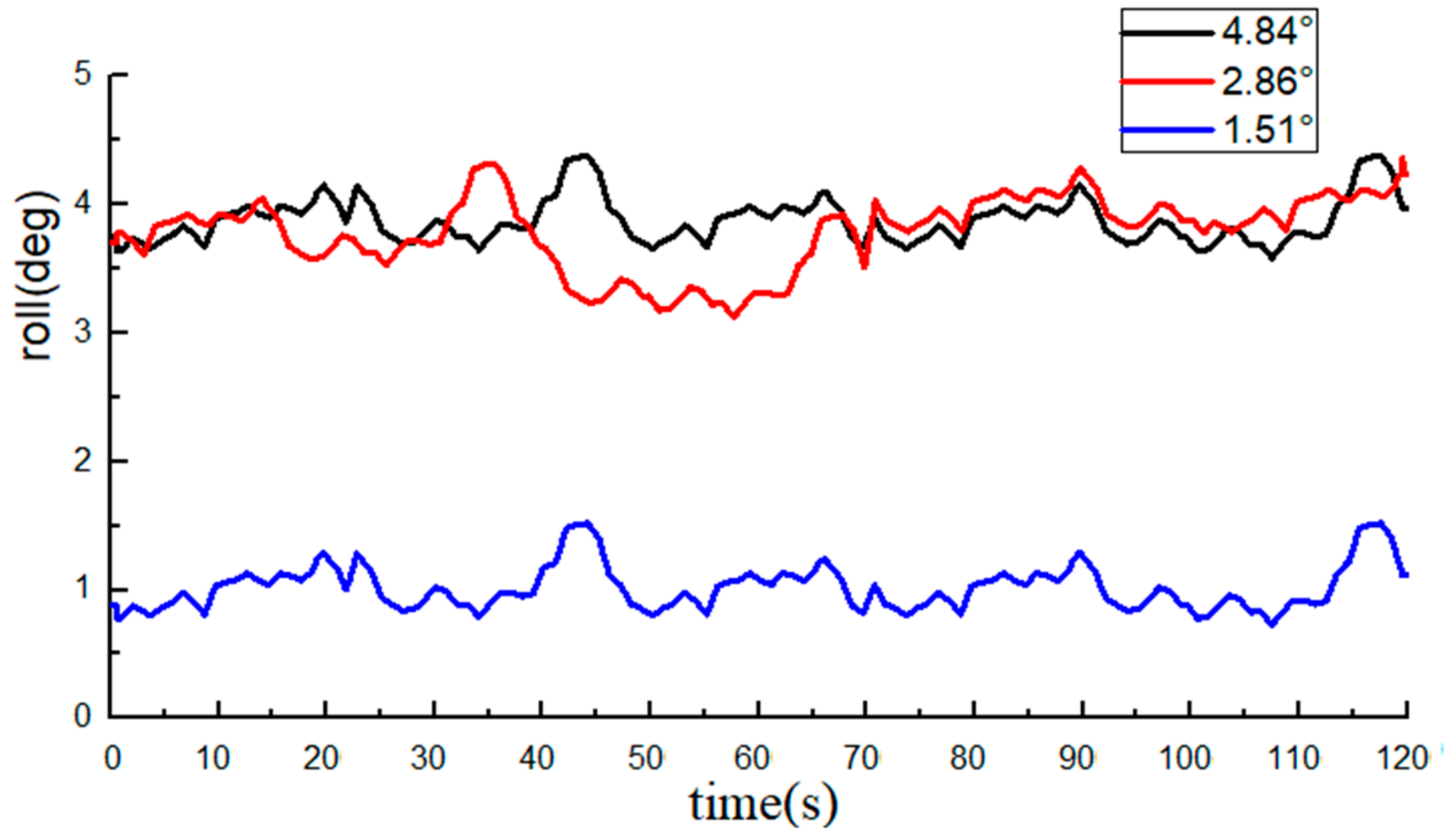
3.1. Roll Angle Monitoring Test Based on the INS
3.1.1. Test Conditions and Methods
3.1.2. Results and Analysis
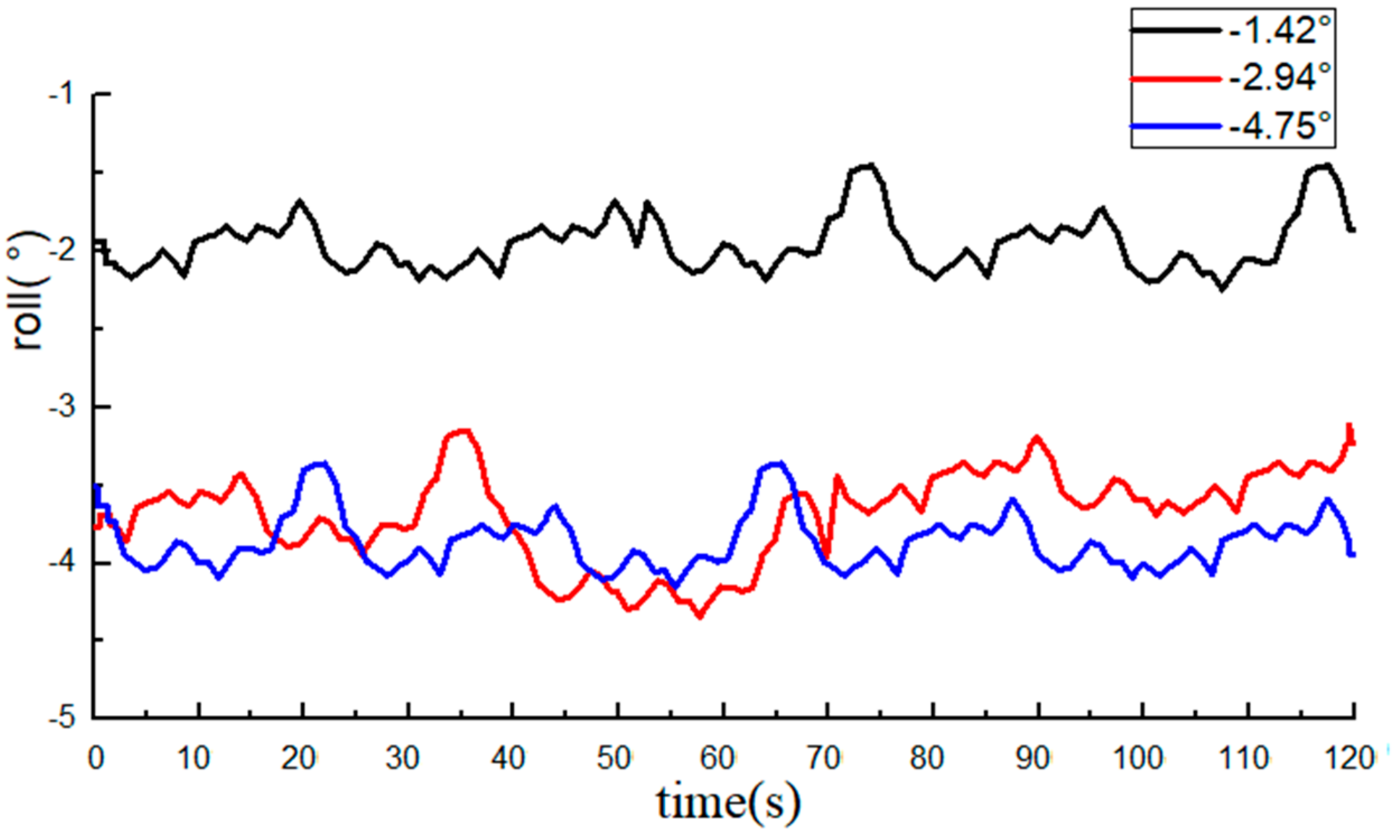
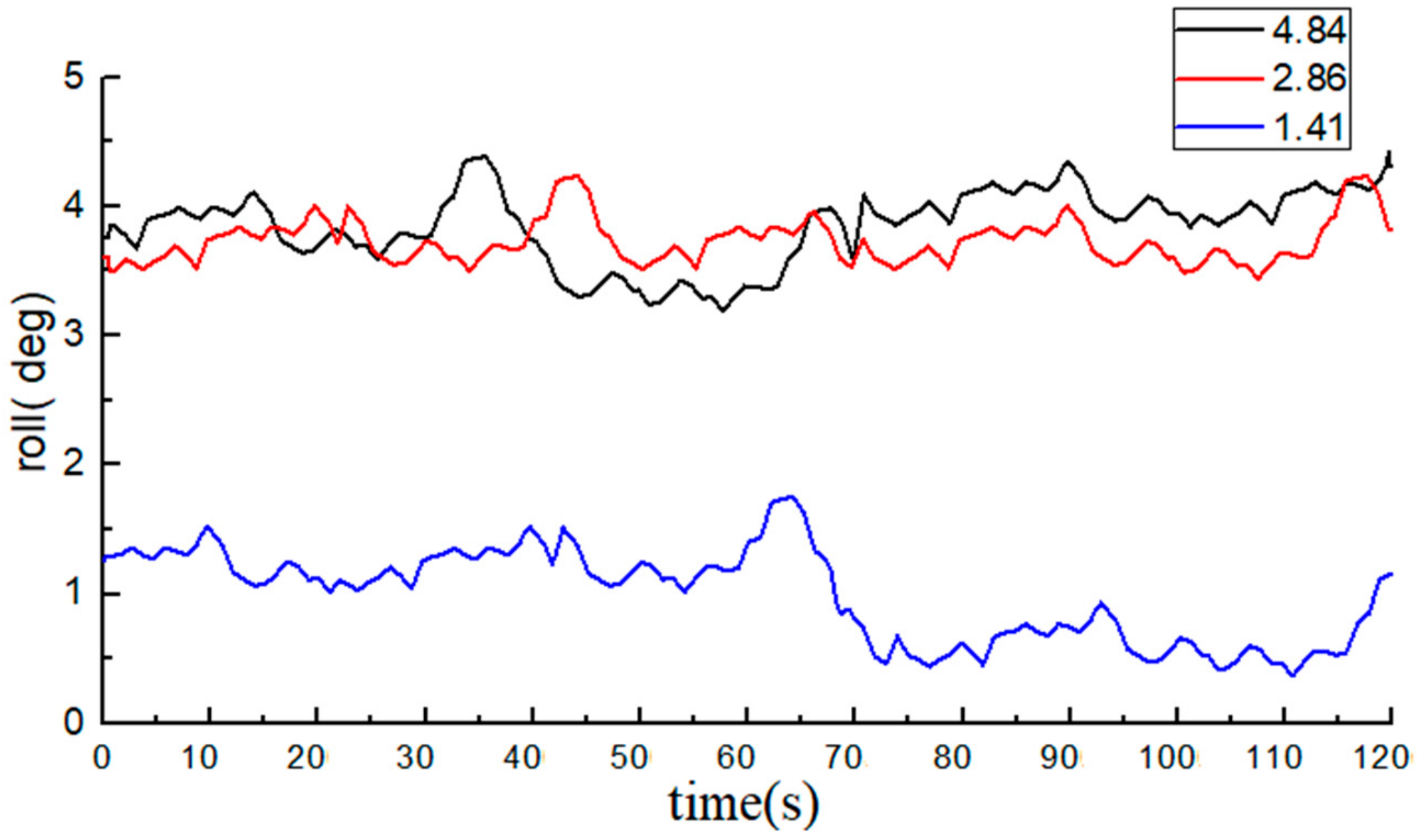
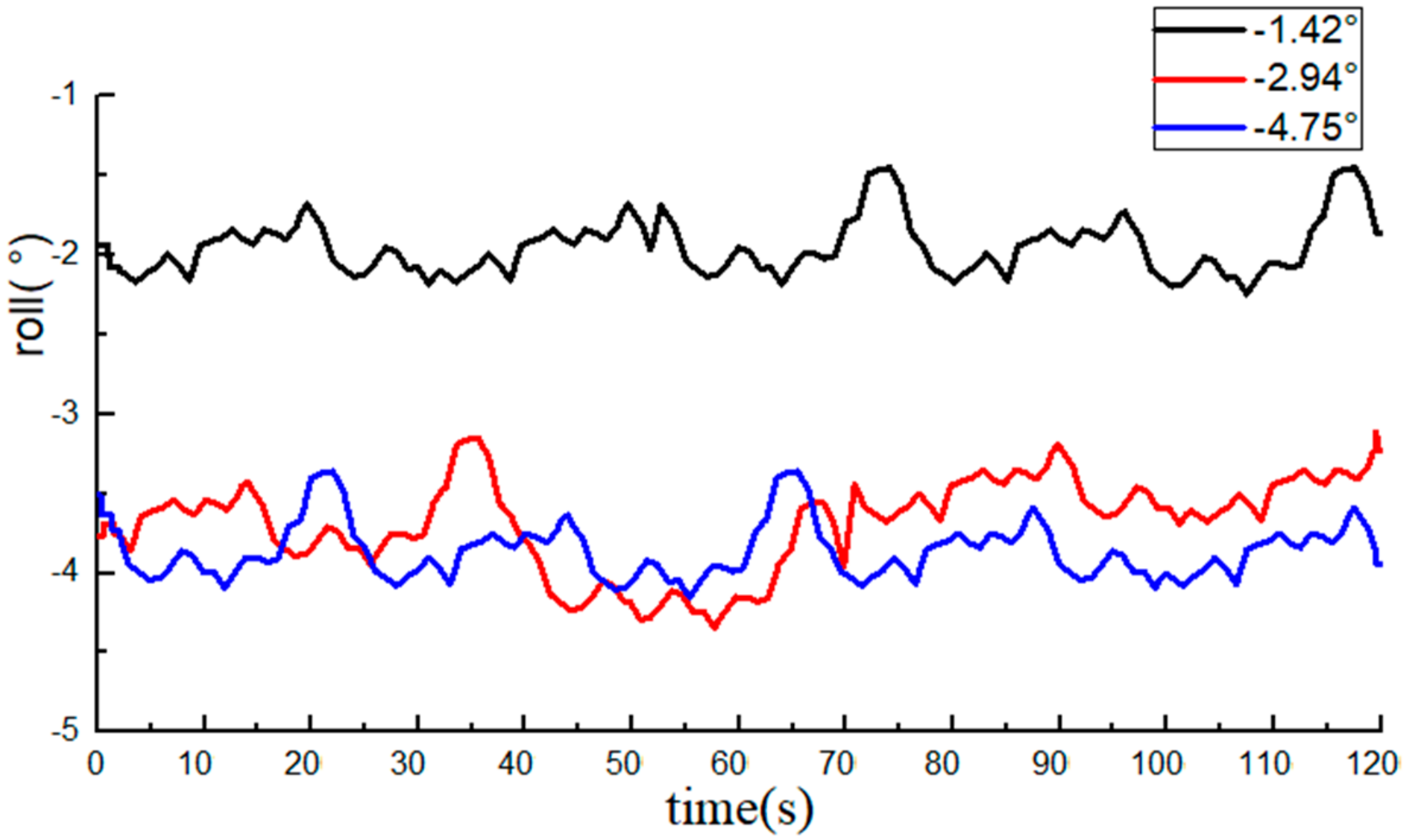
3.2. Roll Angle Monitoring Based on BDS
3.2.1. Test Conditions and Methods
3.2.2. Results and Analysis
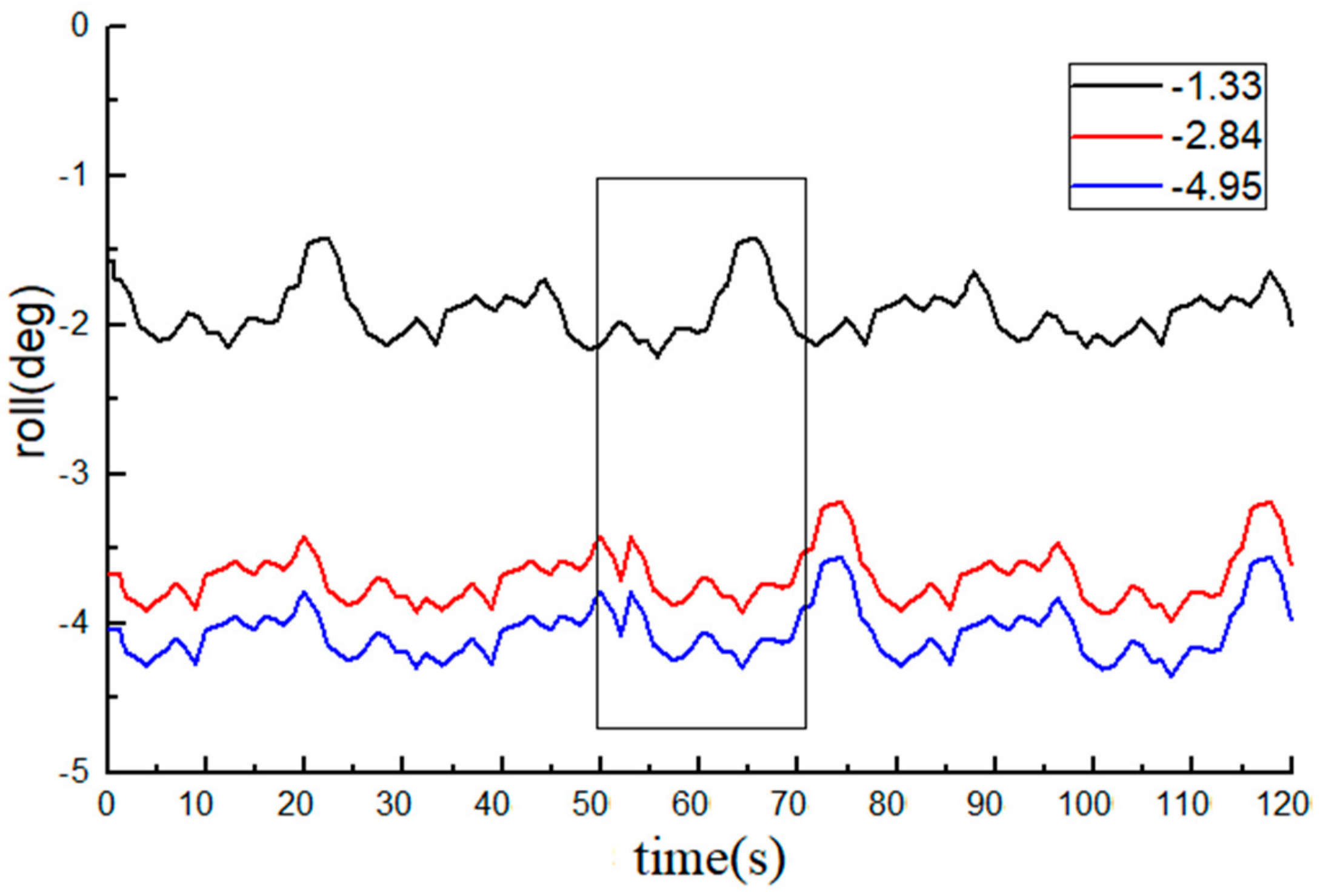
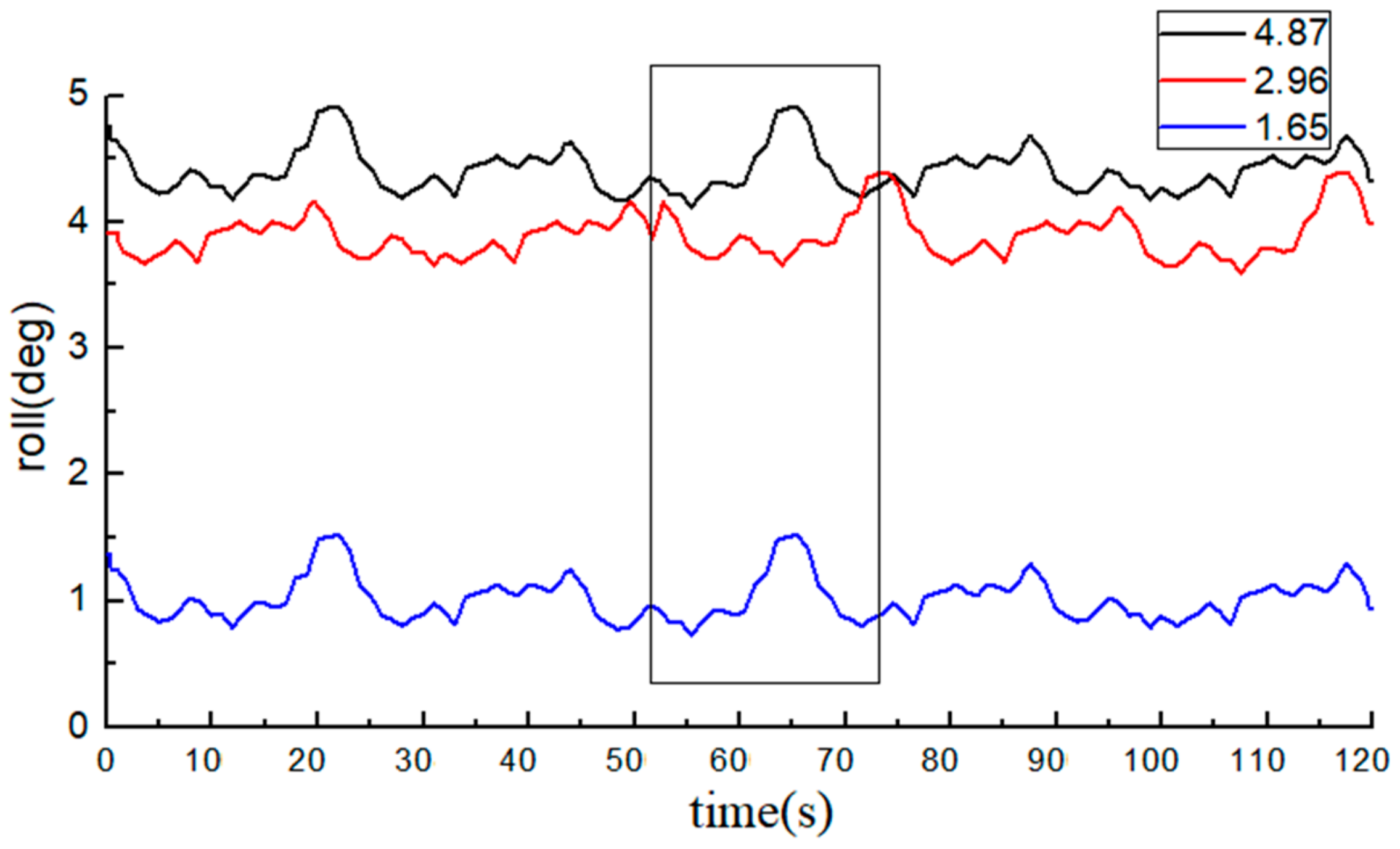
3.3. Roll Angle Precision Monitoring Based on the Integrated System
3.3.1. Experimental Conditions
3.3.2. Experimental Methods
3.3.3. Results and Analysis
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hu, L.; Yang, W.; He, J.; Zhou, H.; Luo, X.; Zhao, R.; Tang, L.; Du, P. Roll angle estimation using low cost MEMS sensors for paddy field machine. Comput. Electron. Agric. 2019, 158, 183–188. [Google Scholar] [CrossRef]
- Altikat, S.; Celik, A. The effects of tillage and intra-row compaction on seedbed properties and red lentil emergence under dry land conditions. Soil Tillage Res. 2011, 114, 1–8. [Google Scholar] [CrossRef]
- Shi, G.; Li, X.; Jiang, Z. An improved yaw estimation algorithm for land vehicles using MARG sensors. Sensors 2018, 18, 3251. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jin, X.; Yin, G.; Chen, N. Advanced estimation techniques for vehicle system dynamic state: A survey. Sensors 2019, 19, 4289. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Q.; Qiu, H. A dynamic path search algorithm for tractor automatic navigation. Trans. ASAE 2004, 47, 639–646. [Google Scholar] [CrossRef]
- Kobayashi, K.; Taniwaki, K.; Saito, H.; Seki, M.; Tamaki, K.; Nagasaka, Y. An autonomous rice transplanter guided by global positioning system and inertial measurement unit. J. Field Robot. 2009, 26, 537–548. [Google Scholar]
- Li, Y.; Efatmaneshnik, M.; Dempster, A.G. Attitude determination by integration of MEMS inertial sensors and GPS for autonomous agriculture applications. GPS Solut. 2012, 16, 41–52. [Google Scholar] [CrossRef]
- Tong, X.; Li, Z.; Han, G.; Liu, N.; Su, Y.; Ning, J.; Yang, F. Adaptive EKF based on HMM recognizer for attitude estimation using MEMS MARG sensors. IEEE Sens. J. 2017, 18, 3299–3310. [Google Scholar] [CrossRef]
- Lin, X.; Yu, Y.; Sun, C. Real-time attitude and gyro-bias estimation for small UAVs using low-cost sensors. In Proceedings of the 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016. [Google Scholar]
- Luo, C.; Li, W.; Yang, H.; Ying, B. Synchronized position and pose tracking technology for mobile target. Nongye Jixie Xuebao Trans. Chin. Soc. Agric. Mach. 2014, 45, 47–52. [Google Scholar]
- Zhu, Q.; Xiao, C.; Hu, H.; Liu, Y.; Wu, J. Multi-sensor based online attitude estimation and stability measurement of articulated heavy vehicles. Sensors 2018, 18, 212. [Google Scholar] [CrossRef] [Green Version]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Han, Y.; Yu, Z. IMU-based automated vehicle slip angle and attitude estimation aided by vehicle dynamics. Sensors 2019, 19, 1930. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gonzalez, R.; Dabove, P. Performance Assessment of an Ultra Low-Cost Inertial Measurement Unit for Ground Vehicle Navigation. Sensors 2019, 19, 3865. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Q.; Luo, X.; Wang, M.; Zhao, Z.; Li, Q.; Xu, Y.; Ou, Y.; Liu, G.; Lin, J.; Si, Y. Design of a laser land leveler for paddy field. Trans. Chin. Soc. Agric. Eng. 2007, 2007. [Google Scholar] [CrossRef]
- Hu, L.; Luo, X.; Lin, C.; Yang, W.L.; Xu, Y.; Li, Q. Development of 1PJ-4.0 laser leveler installed on a wheeled tractor for paddy field. Nongye Jixie Xuebao Trans. Chin. Soc. Agric. Mach. 2014, 45, 146–151. [Google Scholar]
- Zuoxi, Z.; Xiwen, L.; Qing, L.; Bin, C.; Xin, T.; Lian, H.; Yongjian, L. Leveling control system of laser-controlled land leveler for paddy field based on MEMS inertial sensor fusion. Trans. CSAE 2008, 24, 119–124. [Google Scholar]
- Hu, L.; Lin, C.; Luo, X.; Yang, W.; Xu, Y.; Zhou, H.; Zhang, Z. Design and experiment on auto leveling control system of agricultural implements. Trans. Chin. Soc. Agric. Eng. 2015, 31, 15–20, (In Chinese with English abstract). [Google Scholar]
- Ma, C.; Zheng, Y.; Tan, Y.; Lan, Y.; Wang, S. Design of two-axis attitude control system based on MEMS sensors. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2015, 31, 28–37, (In Chinese with English abstract). [Google Scholar]
- Vargas-Meléndez, L.; Boada, B.L.; Boada, M.J.L.; Gauchía, A.; Díaz, V.; Jin, X.; Yang, F.; Sun, S.; Wei, H. A sensor fusion method based on an integrated neural network and Kalman filter for vehicle roll angle estimation. Sensors 2016, 16, 1400. [Google Scholar] [CrossRef] [Green Version]
- Garcia Guzman, J.; Prieto Gonzalez, L.; Pajares Redondo, J.; Sanz Sanchez, S.; Boada, B.L. Design of low-cost vehicle roll angle estimator based on Kalman filters and an IoT architecture. Sensors 2018, 18, 1800. [Google Scholar] [CrossRef] [Green Version]
- García Guzmán, J.; Prieto González, L.; Pajares Redondo, J.; Montalvo Martinez, M.M.; Boada, L.; Jesús, M. Real-time vehicle roll angle estimation based on neural networks in IoT low-cost devices. Sensors 2018, 18, 2188. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Yu, S.; Liu, C.; Yuan, X.; Liu, S.; Trommer, G.F. A dual-linear Kalman filter for real-time orientation determination system using low-cost MEMS sensors. Sensors 2016, 16, 264. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Sun, Z.; Zhang, W.; Chen, Q. A novel approach for attitude estimation based on MEMS inertial sensors using nonlinear complementary filters. IEEE Sens. J. 2016, 16, 3856–3864. [Google Scholar] [CrossRef]
- Kamal Mazhar, M.; Khan, M.J.; Bhatti, A.I.; Naseer, N. A novel roll and pitch estimation approach for a ground vehicle stability improvement using a low cost IMU. Sensors 2020, 20, 340. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khot, L.R.; Tang, L.; Steward, B.; Han, S. Sensor fusion for improving the estimation of roll and pitch for an agricultural sprayer. Biosyst. Eng. 2008, 101, 13–20. [Google Scholar] [CrossRef]
- Raja, M.; Guven, U. Nano satellite attitudes error estimation using magnetometer data with utilization of Kalman filter. In Recent Advances in Communication Infrastructure; Springer: Singapore, 2020; pp. 1–16. [Google Scholar]
- Xsens North America Inc. MTi User Manual; Document MT0605P, Revision E; Xsens North America Inc.: El Segundo, CA, USA, 17 January 2014. [Google Scholar]
- Wu, C.; Fang, X. Development of precision service system for intelligent agriculture field crop production based on BeiDou system. Smart Agric. 2019, 1, 83–90. [Google Scholar]
- Sahu, N.; Gupta, R.; Kumar, A.; Bahl, R.; Kar, I.N. Centralized kalman filter for fusion of multiple on-board auxiliary sensors with ins for underwater navigation. In Proceedings of the 2019 IEEE Underwater Technology (UT) Conference, Kaohsiung, Taiwan, 16–19 April 2019. [Google Scholar]
- Ministry of Land and Resources of the People’s Republic of China. The Communique of the Second National Land Survey Data Main Achievements. 2013. Available online: http//www.gov.cn/jrzg/2013-12/31/content_2557453.htm (accessed on 15 March 2020).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference/° | Measured Value of the INS/° | Standard Deviation of the INS/° | Absolute Error/° | Mean Absolute Error/° |
|---|---|---|---|---|
| −1.43 | −1.92 | 0.41 | 0.49 | 0.78 |
| −2.94 | −3.76 | 0.42 | 0.82 | |
| −4.75 | −3.78 | 0.38 | 0.97 | |
| 4.84 | 3.86 | 0.29 | 0.98 | |
| 2.86 | 3.73 | 0.47 | 0.87 | |
| 1.51 | 0.99 | 0.45 | 0.52 |
| Reference/° | Measured Value of the BDS/° | Standard Deviation of the BDS/° | Absolute Error/° | Mean Absolute Error/° |
|---|---|---|---|---|
| −1.43 | −1.95 | 0.21 | 0.52 | 0.75 |
| −2.94 | −3.68 | 0.29 | 0.74 | |
| −4.75 | −3.86 | 0.31 | 0.89 | |
| 4.84 | 3.89 | 0.29 | 0.95 | |
| 2.86 | 3.79 | 0.35 | 0.93 | |
| 1.51 | 1.02 | 0.18 | 0.49 |
| Measured Value of the Ruler/° | Measured Value of the System/° | Standard Deviation of the System/° | Absolute Error/° | Mean Absolute Error/° |
|---|---|---|---|---|
| −1.33 | −1.92 | 0.31 | 0.59 | 0.73 |
| −2.84 | −3.69 | 0.22 | 0.85 | |
| −4.95 | −4.06 | 0.31 | 0.89 | |
| 4.87 | 4.41 | 0.29 | 0.46 | |
| 2.96 | 3.89 | 0.35 | 0.93 | |
| 1.65 | 1.02 | 0.25 | 0.63 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Jia, H.; Qi, J.; Sun, H.; Tian, X.; Liu, H.; Fan, X. An Acquisition Method of Agricultural Equipment Roll Angle Based on Multi-Source Information Fusion. Sensors 2020, 20, 2082. https://doi.org/10.3390/s20072082
Li Y, Jia H, Qi J, Sun H, Tian X, Liu H, Fan X. An Acquisition Method of Agricultural Equipment Roll Angle Based on Multi-Source Information Fusion. Sensors. 2020; 20(7):2082. https://doi.org/10.3390/s20072082
Chicago/Turabian StyleLi, Yang, Honglei Jia, Jiangtao Qi, Huibin Sun, Xinliang Tian, Huili Liu, and Xuhui Fan. 2020. "An Acquisition Method of Agricultural Equipment Roll Angle Based on Multi-Source Information Fusion" Sensors 20, no. 7: 2082. https://doi.org/10.3390/s20072082
APA StyleLi, Y., Jia, H., Qi, J., Sun, H., Tian, X., Liu, H., & Fan, X. (2020). An Acquisition Method of Agricultural Equipment Roll Angle Based on Multi-Source Information Fusion. Sensors, 20(7), 2082. https://doi.org/10.3390/s20072082