1. Introduction
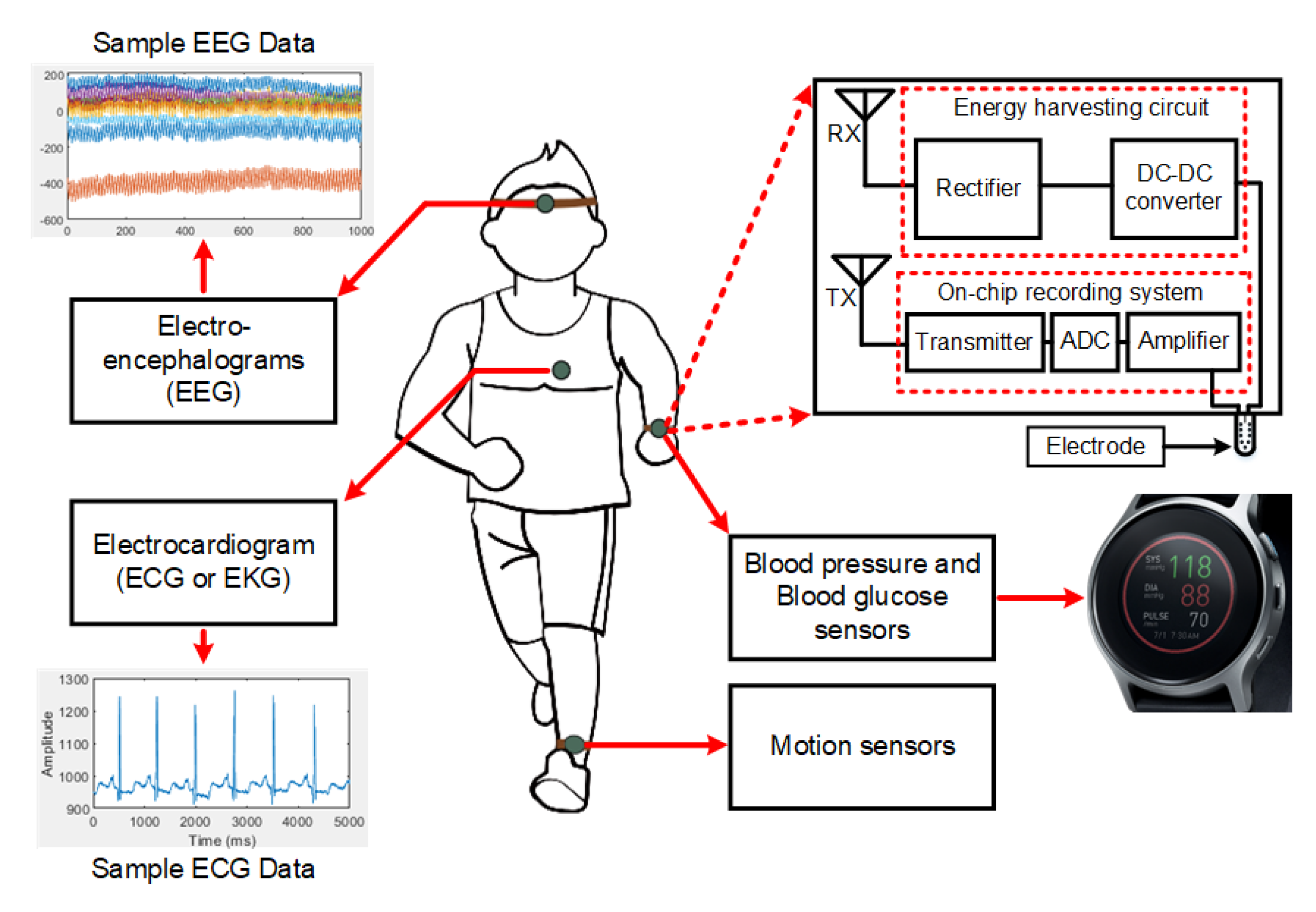
Wearable body sensor network (WBSN) interconnects a network of heterogeneous sensors, which, as outlined in
Figure 1, is becoming even more popular in long-term health monitoring and diagnostics [
1,
2,
3]. Continuous glucose monitoring, which helps to control diseases like diabetes, is one of the most common examples of health monitoring applications [
4]. The use of wearable potentiometric sensors to analyze the biofluids such as saliva, tears, and urine open up the new direction of using sensors for subcutaneous glucose monitoring [
5]. Wearable sensors are typically patched to the skin or embedded into the clothes, requiring high flexibility and conformability [
6]. Polyethylene naphthalate (PEN) [
7], polyimide [
8], poly-di-methyl-siloxane (PDMS) [
9], parylene [
10], and Kapton [
11] are just a few examples of flexible substrates that have been investigated as wearable sensor platforms. Besides the flexibility and conformability, efficient power delivery to the sensors is also an important aspect that needs to be taken into consideration in wearable sensor system design. Batteries are traditionally used to power up WBSN, even though they require frequent charging and occasional replacements. To avoid the operational complexity of replacing the batteries, optical fibers are used to provide power to the batteries using light [
12]. However, this technique limits the natural movement and the working range of the system [
13]. Alternatively, in prior works, sensors are designed to be powered by a near-field inductive-coupling wireless power transfer (IWPT) scheme [
14,
15,
16]. IWPT uses two or more coils that are separated by a medium (e.g., air or tissue layers). An oscillating current generates an electromagnetic field that is emitted from the primary coil and induces an electric current in the secondary coil. The IWPT performance mainly depends on the substrate materials, coil geometry, and the distance between the coupled coils [
17,
18]. Various applications require various dimensions of the coil, and for rapid prototyping, it is highly important to model the coils in terms of scaling factors. There is no prior work that has focused on this aspect of coil modeling, especially in the context of wearable, flexible sensor applications.
Hereafter, the design and characterization of the secondary receiver (RX) coil for an IWPT is investigated in this paper, analyzing the effects of coil scaling on parameters such as
Q-factor and PTE. This paper also investigates how the coil scaling changes the parameters of the lumped component-based modeling (e.g., resistance, inductance, and parasitic capacitance) that eventually affect the coil’s properties: self-resonating frequency,
Q-factor, PTE, etc. The objective of this paper is to establish a mathematical model to identify the optimum scaling factor that would result in the best-optimized RX coil design in terms of the
Q-factor and the PTE. The mathematical model also takes into account the effect of skin contact with the substrate and how that affects the PTE for a particular transmitter–receiver (TX–RX) pair. For a quick and rapid prototyping, having a model with respect to the scaling factor is better. The rest of the paper is organized as follows.
Section 2 presents the analysis and the modeling of the spiral coil in terms of the scaling factor.
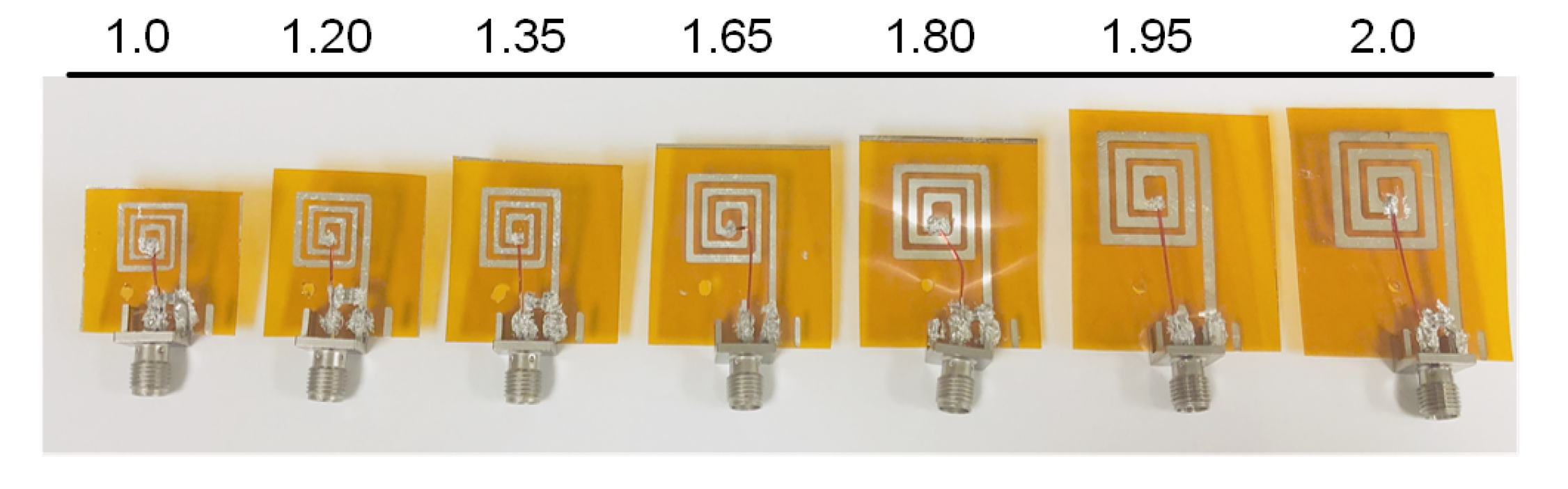
Section 3 presents the implemented IWPT scheme and the fabrication procedure of the flexible spiral coils on Kapton substrate. In
Section 4, the experimental results depicting the correlation between the scaling factor and the
Q-factor, and the lumped element modeling are presented. This is then followed by the conclusion in
Section 5.
2. Analytical Spiral Coil Modeling
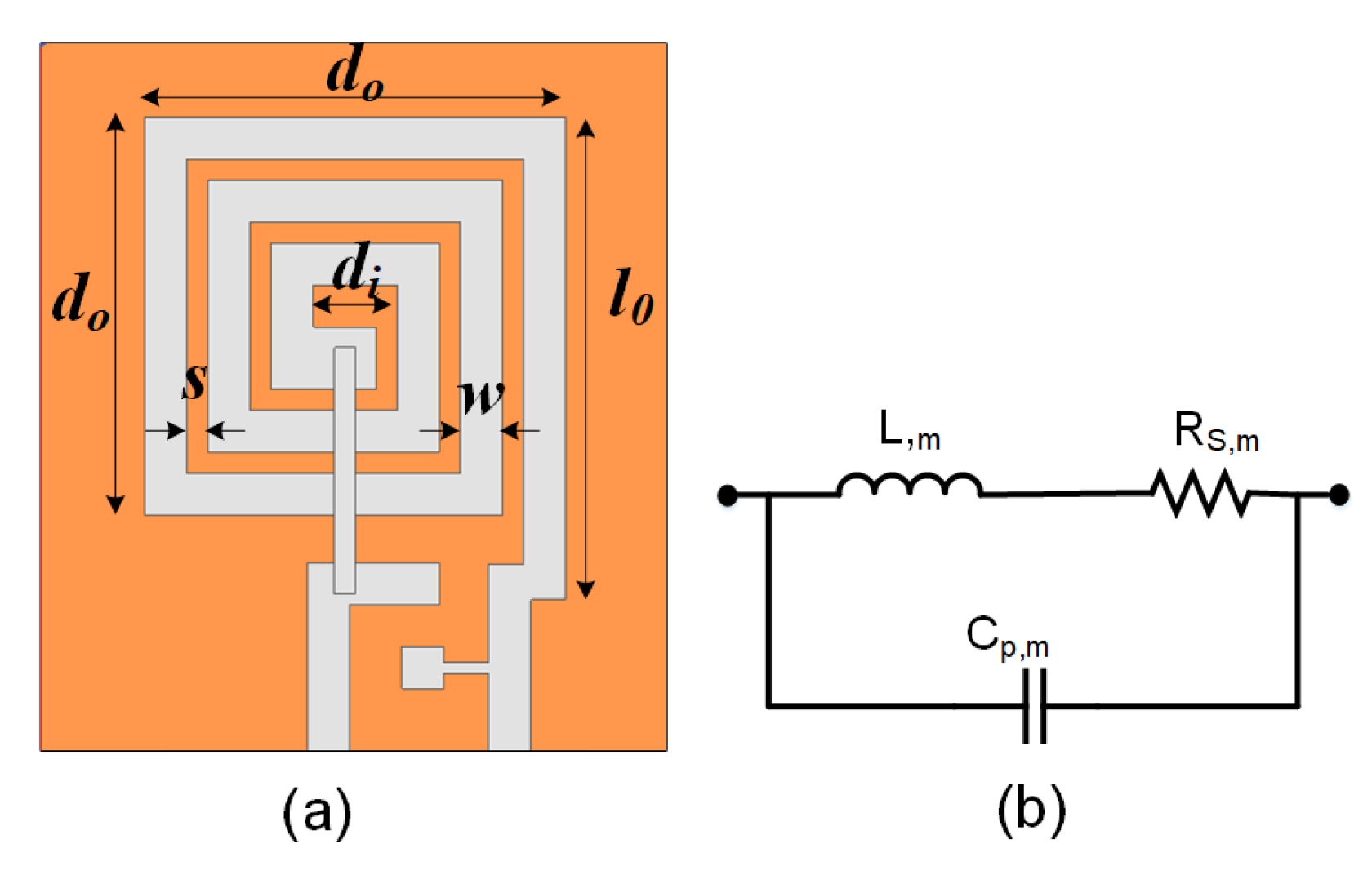
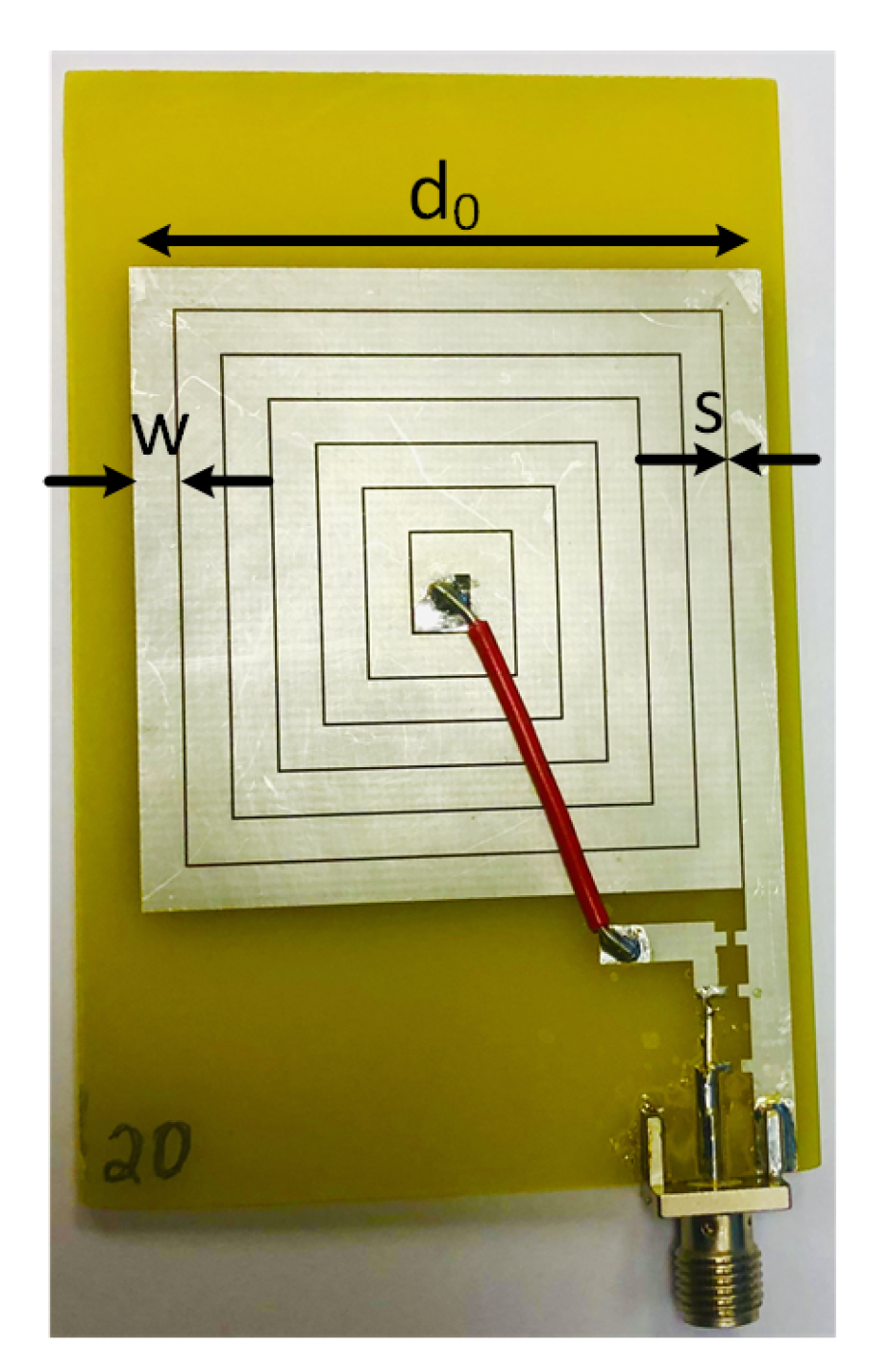
The designed coil has five significant parameters that are highlighted in
Figure 2a: outer diameter,
; inner diameter,
; initial trace length,
; conductor trace width,
w; and gap between traces,
s. The RX design is optimized based on the optimization algorithm presented in our prior work [
19], which takes into account the initial parameters and design constraints, such as the minimum and maximum value range for
,
w, and
s, to find out the best possible design in terms of the maximum PTE performance. In this work, the RX spiral coil is electrically modeled in terms of the resistance
, inductance
, and parasitic capacitance
, as shown in
Figure 2b. In this paper, the values of
,
,
, and
for
m times scaled coil (where all the parameters in
Figure 2a are scaled
m times) are calculated based on the analytical modeling, which is later validated through the simulation and measurement results.
For an
m-scaled coil, the total length of the conductor trace is
, which can be modeled as
Here,
n denotes the number of turns of the coil. When
m = 1, the total length of the conductor trace of the base coil is determined and denoted as
. Thus, a linear relationship between the
and
can be derived as
The total length of the coil
is used to determine the DC resistance,
, of the coil as
where
is the resistivity of the trace of the coil and
is the thickness of the metal trace. The value of
is thus independent of the value of
m, as shown in Equation (
4).
Due to the increase of the coil resistance at high frequency, the skin effect is also taken into consideration in the modeling. Thus, the total resistance,
can be evaluated as [
20]:
where
is the skin depth,
is the permeability of the free space, and
is the relative permeability of the trace conductor.
As
is independent of
m and
does not change with
m, the value of
is proven to be independent of the value of
m.
where
is the total resistance when
m = 1. Due to the epoxy used for soldering components, additional resistance needs to be added with the total resistance, which is empirically found and discussed in the later section.
The inductance of the coil with a corresponding scaling factor
m is denoted as
, which can be calculated from the base coil inductance [
21]. With the consideration of the scaling factor
m, the value of
can be evaluated as
where
is the fill factor of the coil and
is the average of
m times of the
and
of the base coil.
where
is the fill factor and
is the average diameter of the coils when
m = 1.
Therefore, the inductance shows a linear relationship with the scaling factor. According to the authors of [
20], the coil’s parasitic capacitance is analyzed through the substrate and across the air gap between the traces.
is the parasitic capacitance of a scaled-
m coil and can be determined as shown in Equation (
12), where
and
are the relative dielectric constants of the substrate and the coating of the substrate, respectively.
and
are constants that are discussed in Equations (
16) and (
17), respectively.
As the length,
, and the spacing,
s, increase by
m factor and that cancels each other out, the value of
is also independent of
m, as shown in Equation (
13).
where
is the total length of the spacing or gap length between the traces. The term
and
mentioned in Equation (
12) are the attenuation and phase constants of the substrate, respectively:
where
f is the operating frequency,
and
are the real and imaginary part of the permittivity of the substrate, respectively. An empirically found capacitance due to the epoxy used in fabrication is also added with the parasitic capacitance,
which is further discussed in
Section 4.
The self-resonating frequency
is the frequency when capacitive reactance,
, and inductive reactance,
, are equal.
By making
and
equal and by substituting Equations (
8) and (
12) in Equations (
18) and (
19), an Equation can be derived allowing
to be calculated as
According to the work presented by Jow et al. [
20], when the resistivity
, inductance
, and parasitic capacitance
of a coil are known, the coil’s
Q-factor can be calculated using Equation (
21).
Thus, the
Q-factor formula can be simplified as Equation (
22). For the case where the values of
,
,
,
w,
s,
n, and
are known and remain constant, the values of
,
, and
in Equation (
23) will be constant. Thus, at a given frequency
f,
Q of an
m-scaled coil becomes a quadratic function of
m. As this quadratic function has a negative leading coefficient
a, the graph of the function is a parabola curve that opens downward and has its maximum value at the vertex of the function. The horizontal coordinate of the vertex is calculated using Equation (
24), allowing the maximum value of the
Q-factor,
, to be determined, as shown in Equation (
25).
The PTE determines the effectiveness of the WPT system at delivering power. The PTE depends on the coupling coefficient
k and
Q-factor of the primary and the secondary coils. The link efficiency of the WPT system is derived as in [
22] where
and
are the
Q-factors of the primary and the secondary coils, respectively, and
is the loaded
Q-factor of the secondary coil.
where
is the load resistance and
is the total resistance of the RX coil.
The coupling coefficient,
k, is a function of the distance between the primary and the secondary coils,
d, and the radius of the coils [
23,
24].
where
and
denote the radii of the primary and the secondary coils, respectively. As the radius of the secondary coil
increases by
m, the outer diameter
also increases by
m, and therefore the coupling coefficient,
k, increases by
according to Equation (
27).
4. Results and Discussion
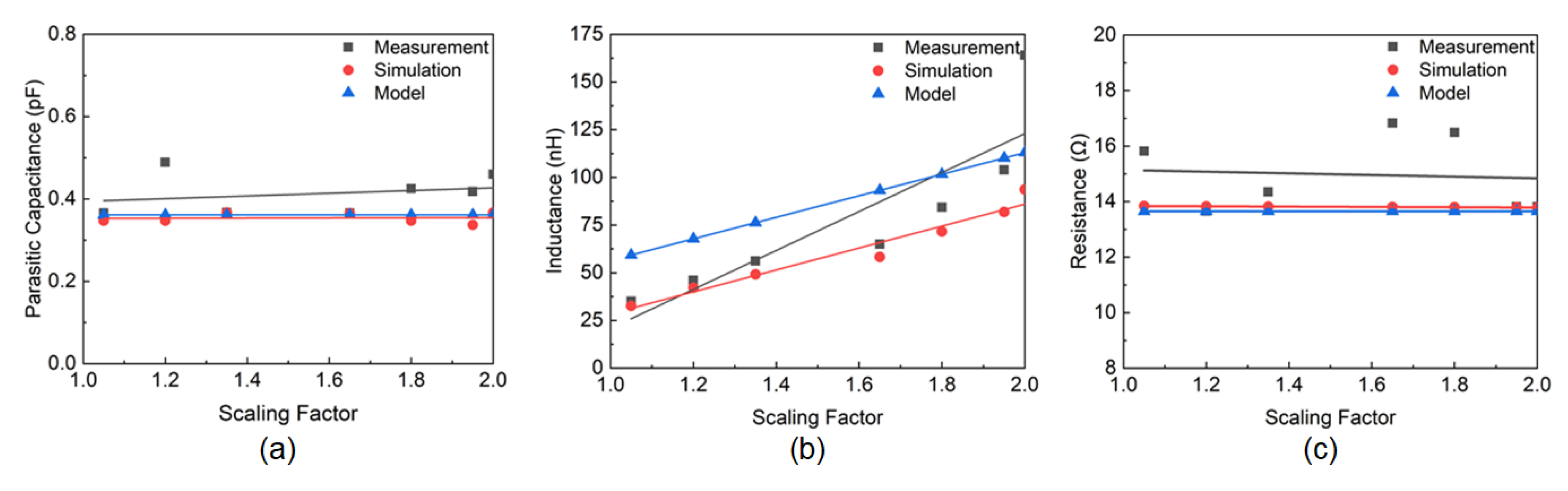
The electromagnetic simulations are performed using Ansys High-Frequency Structures Simulator (HFSS) software for the proposed coil models. The simulated results are used to analyze the impedance of the coils. For the measurement of the coils, the ZVB 20 Vector Network Analyzer (Rohde & Schwarz) is used to evaluate the impedance. From the acquired real and imaginary parts of the impedance, the values of
,
, and
are evaluated, while
is evaluated using Equation (
12). The modeling, simulation, and measurement results of
,
, and
are shown in
Figure 6a–c, respectively. In
Figure 6a, it is evident that the parasitic capacitance of the measured coil is slightly higher than the theoretical, and simulated models. To evaluate the accuracy of the model, the average error percentage for the simulated and the measured results is calculated using Equation (
28), where
N is the number of data points.
The percentage error is calculated to be 1.9% for the simulated results, whereas the measured results show a 13.8% average error compared to the theoretical model. Though an additional capacitance of approximately 350 fF due to the epoxy required for soldering SMA connector with the antenna is incorporated in both analytical and simulated models, the added capacitance is potentially due to the uneven traces during manufacturing. The printing of the stencil mask is inherently characterized by the variations in width due to the transition from liquid to the solid phase of ABS which causes the variations in trace width.
Based on Equation (
11), the inductance
shows a linear relationship with the scaling factor
m which is also evident from
Figure 6b. The measured and simulated results also show a linear relationship with respect to the
m. However, the modeled inductance is significantly higher due to having a lower parasitic capacitance as previously discussed.
The equivalent resistance of the silver coil is shown in
Figure 6c. The theoretically modeled and the simulated results show a steady constant relationship while the measured resistance has a slight decrease. The measured resistance is also found to be higher than the modeled and simulated results due to the uneven traces of the fabricated coils. The additional resistance is added due to the epoxy and the SMA connector connected to the fabricated device. From the empirical data, the resistance value is found to be ∼ 8.7
, which is considered in the modeled and simulated data. According to Equation (
28), approximately 0.72% and 9.3% errors in simulated and the measured results compared to the theoretical model are found for the resistance, respectively.
According to Equation (
22), the
Q-factor is a quadratic function of the scaling factor
m. Furthermore, at a fixed frequency
f, the maximum value of the
Q-factor,
, can be determined at the vertex of the quadratic Equation where
m is equal to
. Therefore, at a fixed frequency, a coil needs to be scaled by a factor of
to achieve the maximum value of the quality factor. The simulated
Q-factor does not account for uneven trace thickness that might be the case for the fabricated coils. By using Equation (
25), the modeled maximum
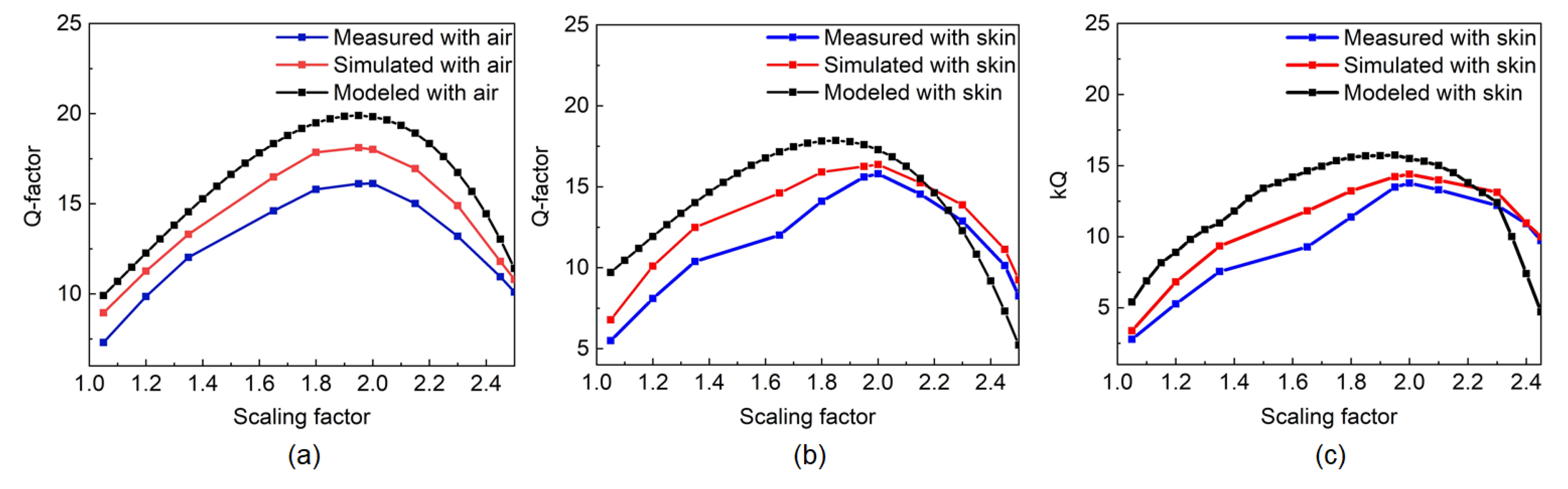
Q-factor can be determined. Although some discrepancies are observed between the theoretically modeled and the measurement results due to the fringe capacitance effects, the model can still predict the behavior of the coil for different scaling ratios. As shown in
Figure 7a, the modeled Q-factor shows the highest value of 20 for the scaling factor of 2.00 at 405 MHz frequency. The frequency of operation is in the Medical Implant Communication Service (MICS) band, as the flexible RX coils are meant to be used for wearable sensing applications. From Equation (
24), the calculated
value is also found to be 2.00, showing alignment with the simulation and measurement results. There are discrepancies between the measured-modeled and simulated-modeled results according to
Figure 7a. Though the modeled resistance and capacitance are very close to the simulated values, the modeled inductance is slightly higher than the simulated values, which reduces the overall
Q-factor of the simulated coil. The difference between the modeled and the measured
Q-factor is due to the higher resistance and capacitance values that are found from the measurement results. To evaluate the performance of these flexible coils as wearable sensors, a set of measurements are also performed with the coils in contact with the skin. In the modeling, the only variable factor is the relative dielectric constant of the substrate,
, in Equation (
12), which is changed due to the addition of the dielectric constant of the skin and other tissue layers underneath the substrate. If the dielectric constant of the skin layer is
and the thickness of the skin layer is represented as
, the effective dielectric constant due to the skin layer and the substrate can be represented as Equation (
29) [
26].
Here,
represents the thickness of the substrate layer. As the overall dielectric constant increases due to the contact with the skin, the maximum
Q-factor for different scaling factors is also changed according to Equation (
25). As shown in
Figure 7b, the theoretically modeled
Q-factor with the skin contact is reduced compared to the
Q-factor without any skin contact. The simulated and the measured results also follow the same pattern as the theoretical model. Due to the skin contact, the modeled, simulated, and measured
Q-factors of the
m-scaled coils are decreased by approximately 14% compared to the
Q-factor values without the skin contact. However, the maximum
Q-factor still shows the maximum value around
∼ 2.00. To better understand the effect of the scaling factor, the product of the coupling coefficient,
k, and
Q-factor is plotted with respect to the scaling factor as shown in
Figure 7c. With the increase of the scaling factor of the RX coil, the value of
k increases for a fixed TX coil and for a fixed distance between the TX and RX coils. The fabricated TX coil is used to find the value of
k and the distance between the TX and RX coils is kept to be 10 mm. As a result, the product,
, follows a similar trend as the
Q-factor plot, which shows the maximum
value at ∼ 2.00 scaling factor.
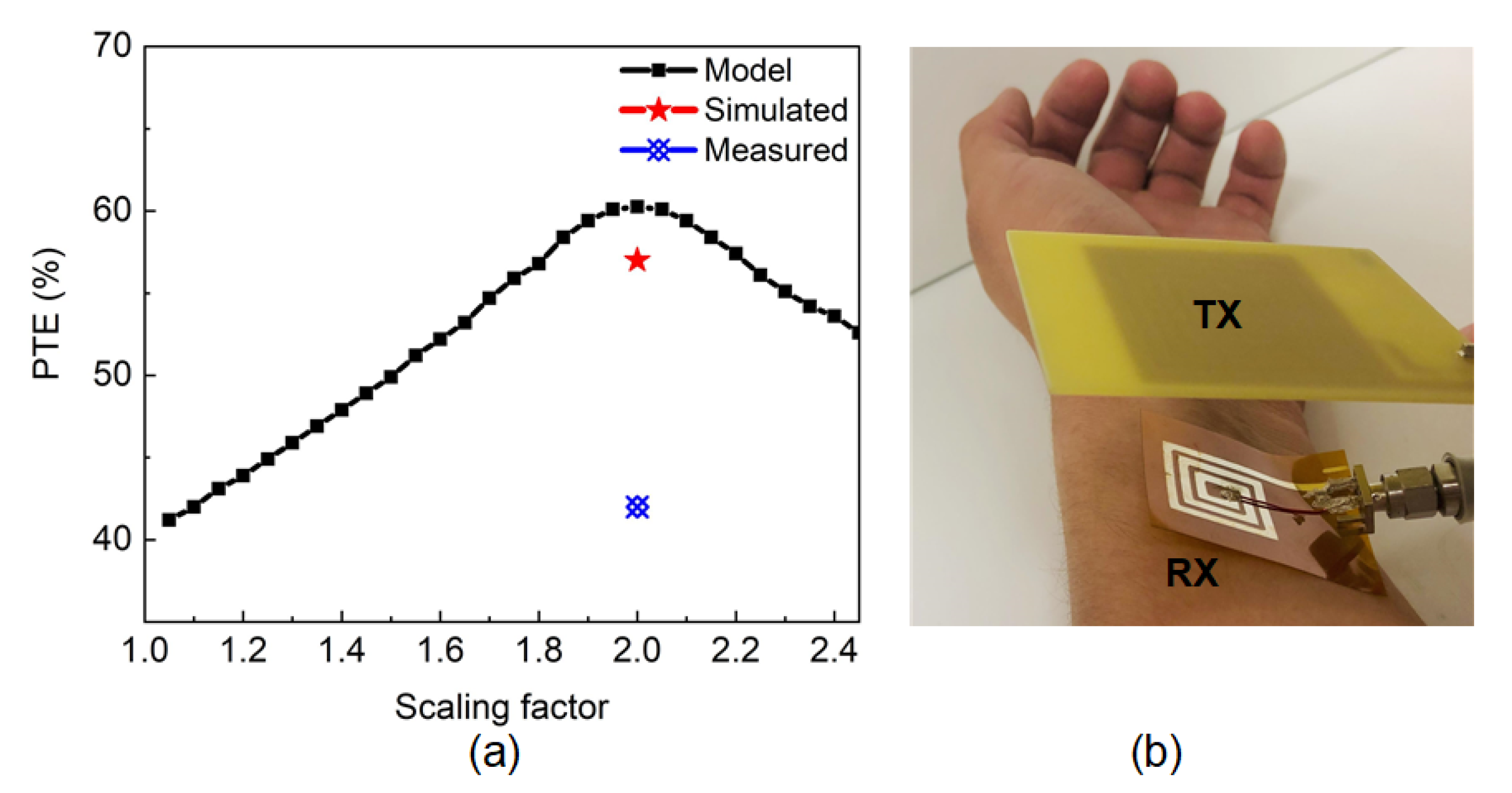
The PTE is theoretically modeled for the desired resonating frequency, 405 MHz, for all the scaling factors, which is shown in
Figure 8a. As the fabricated Kapton-based coil is intended to be used as a wearable sensor, the PTE is also modeled, simulated, and measured when the RX coil is in contact with the skin. The modeled PTE shows an increasing trend over the scaling factor as shown in
Figure 8a. With the increase in the scaling factor, the coupling coefficient increases. In this work, the distance between the TX and RX coils are kept as 10 mm. As a result, the coupling coefficient is only dependent on the RX size which is a linear function of the scaling factor. Thus, the PTE also shows an increase with the increase of the scaling factor. The RX coil with the scaling factor of 2.00 is used in the simulation and measurement of the PTE due to its high
Q-factor values. The simulated and measured PTE,
are calculated from the transmitted power,
and received power,
as shown in Equation (
30).
To resonate the RX coil at the 405 MHz operating frequency, 1 pF capacitor is added in parallel with the coil. The
Q-factor of the fabricated TX coil is 134, and a parallel capacitor of 3.3 pF is used to resonate the TX to 405 MHz. The test set-up for PTE measurement with skin contact is shown in
Figure 8b. For a transmitted power of 19 dBm, the system can achieve approximately 42% measured PTE having the skin in contact when the distance between the TX and RX coil is 10 mm. On the other hand, in simulation, 57% PTE is achieved for 2.00 scaled RX coil. The discrepancies between the PTE results are due to the bending effect during the measurements which is not taken into consideration in the simulation or mathematical modeling. The theoretical modeling of the bending effect of the flexible substrate is planned to be considered in the future works to improve the model. The performance of the proposed WPT system is also compared with the state-of-the-art systems in
Table 3. As the wearable WPT systems can be used to provide power to the electrodes or other sensors, PTE of the WPT system is very important. The measured PTE of the proposed flexible WPT system is 42% which is much higher than the other works and thus, the system is able to provide more power to the load circuitry. The proposed modeling provides a systematic way to choose the best-optimized architecture for the wearable sensor applications. On the contrary, prior works did not follow any modeling Equation to find the optimized design.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}