PM2.5 Concentration Estimation Based on Image Processing Schemes and Simple Linear Regression



Abstract
:1. Introduction
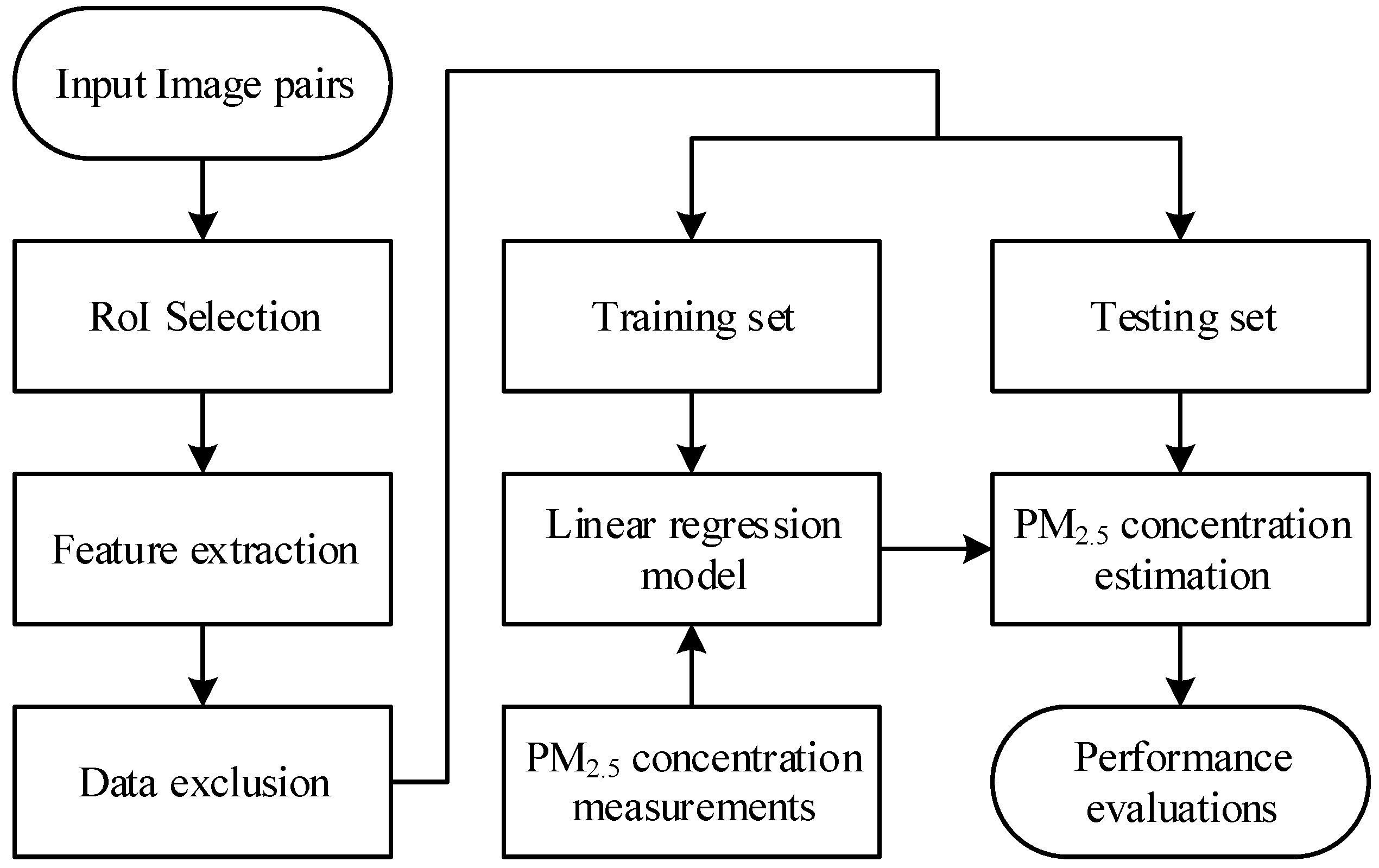
2. The Proposed Approach
2.1. Automatic RoI Selection
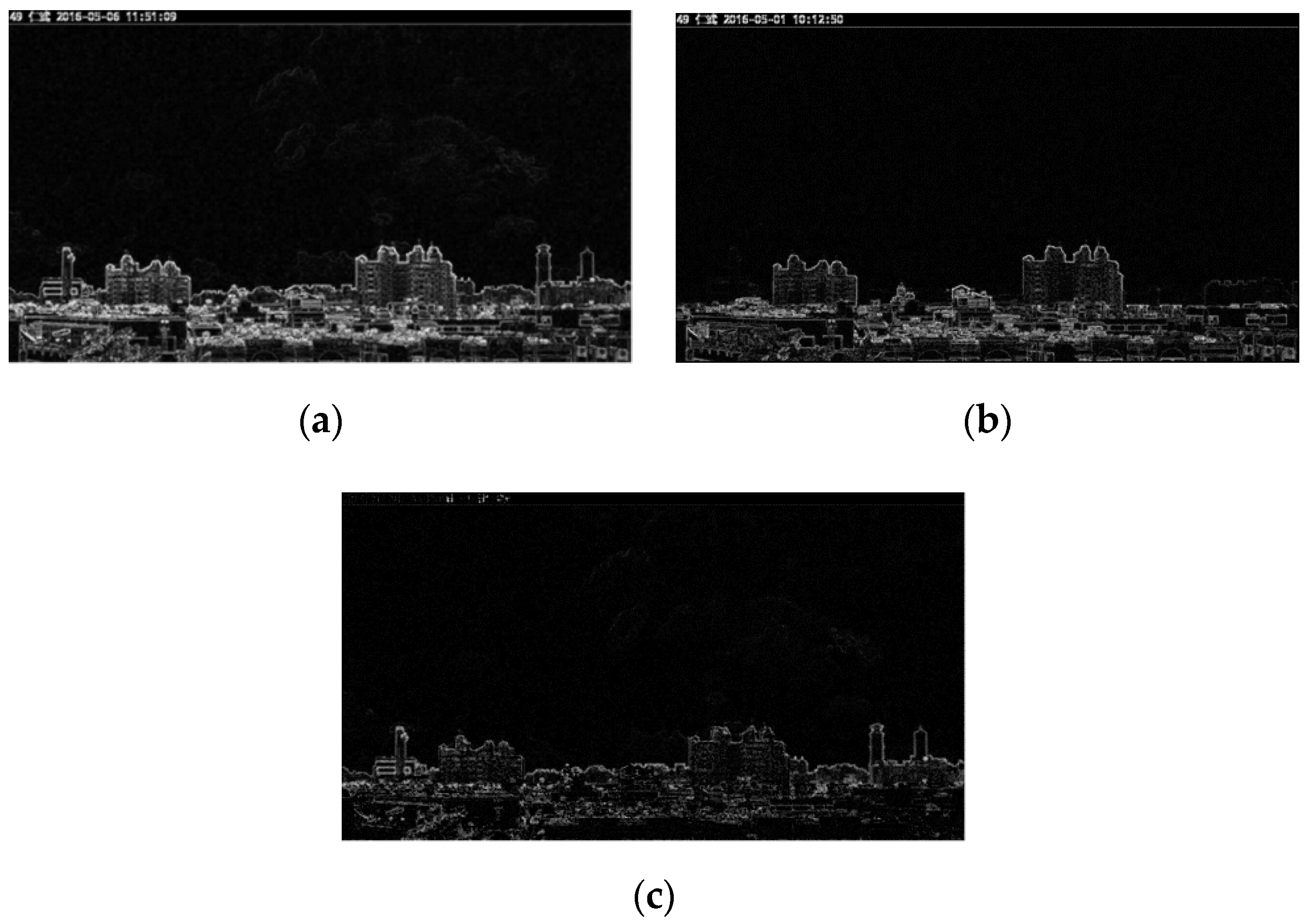
2.1.1. Sobel Edge Detection
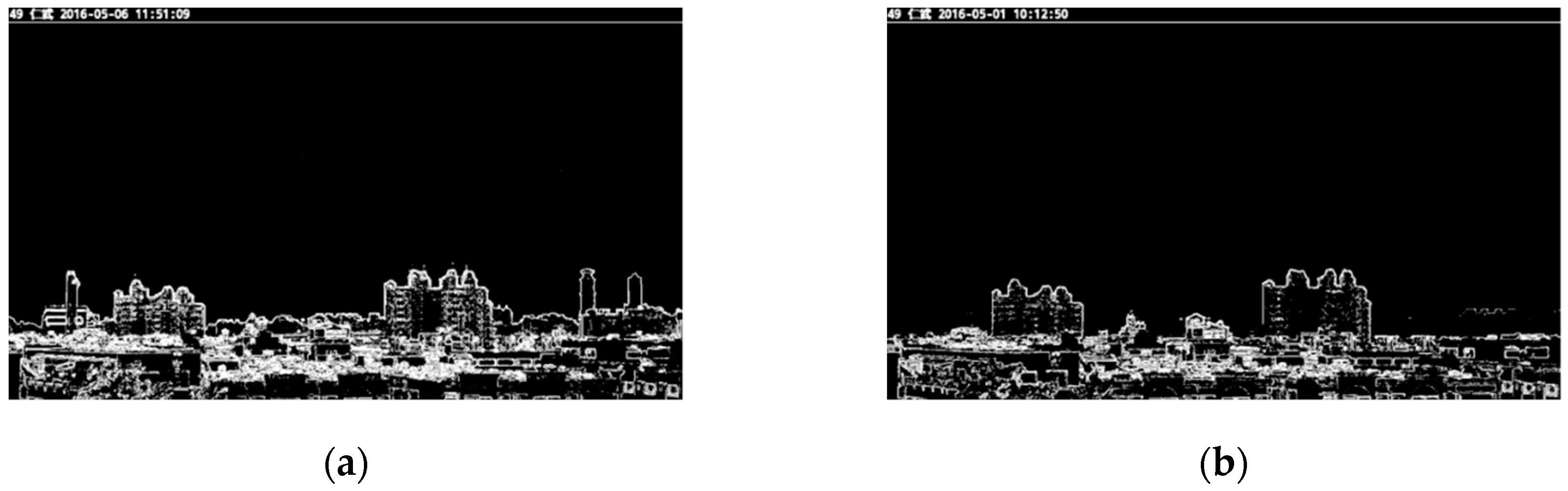
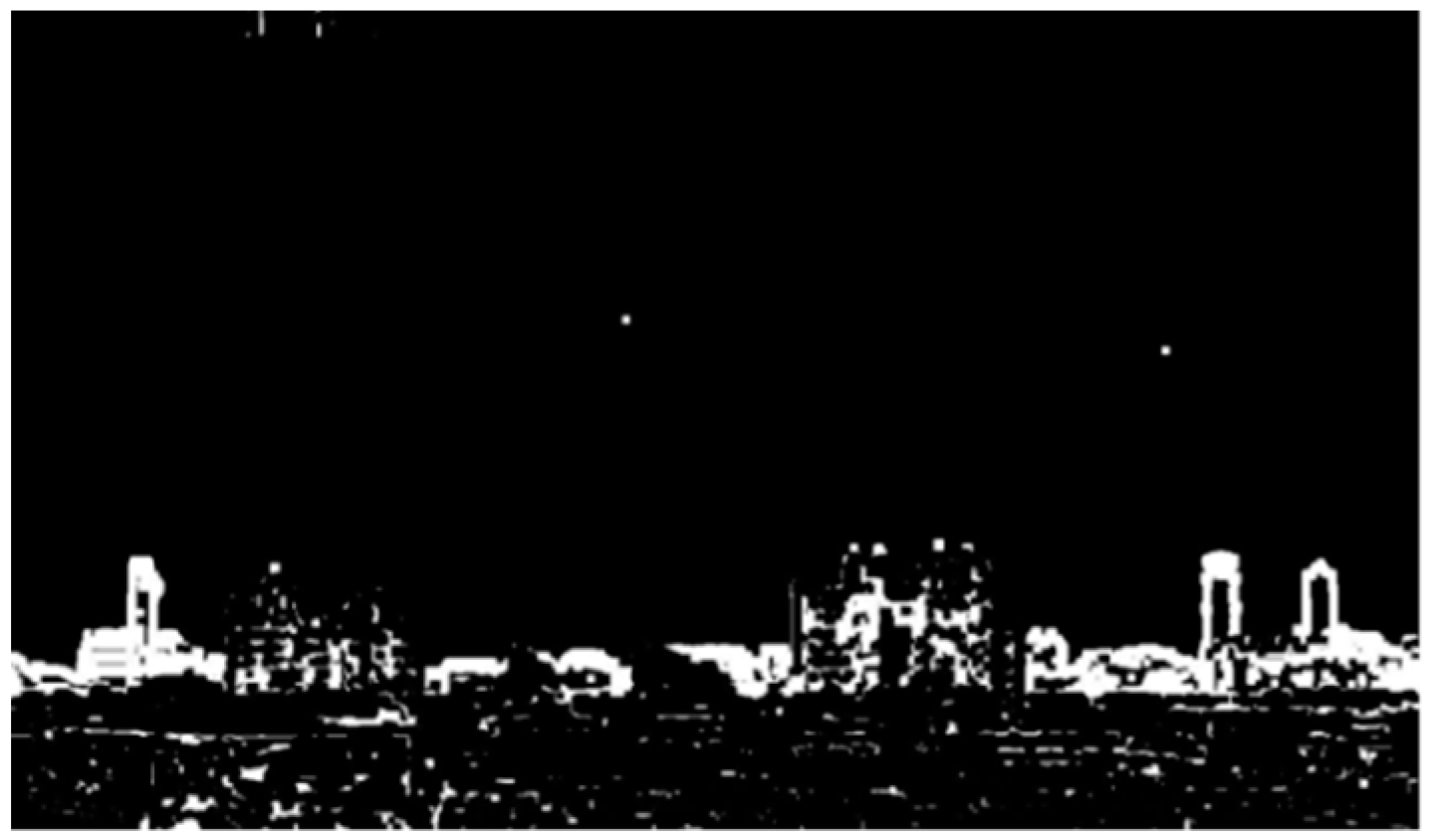
2.1.2. Otsu Thresholding
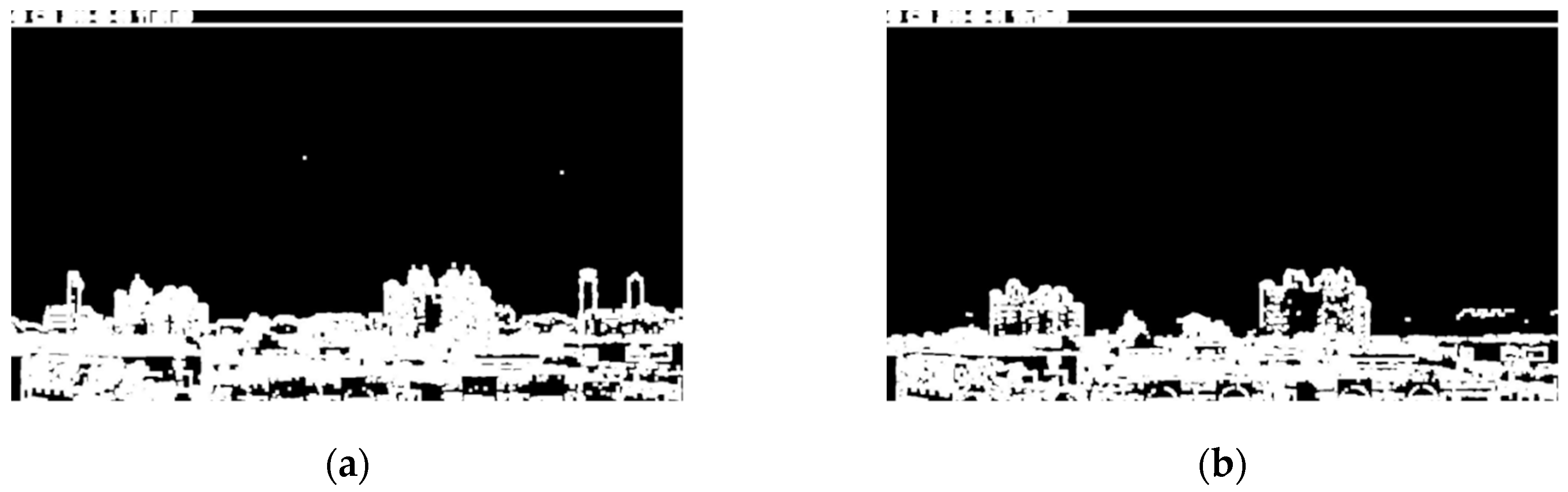
2.1.3. Morphological Dilation
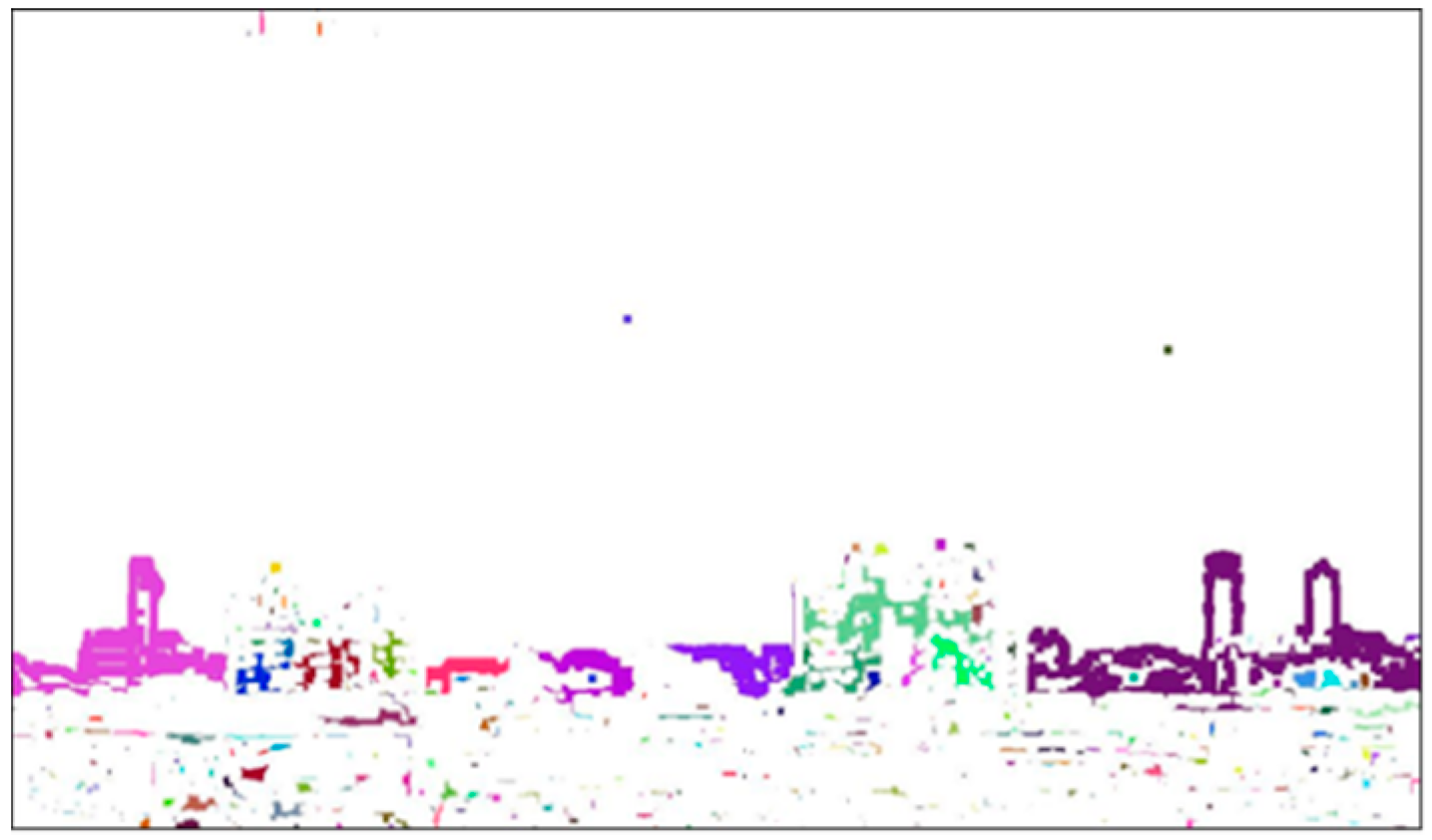
2.1.4. Image Subtraction and Labeling
2.1.5. Selected RoI in the Given Pair of Images
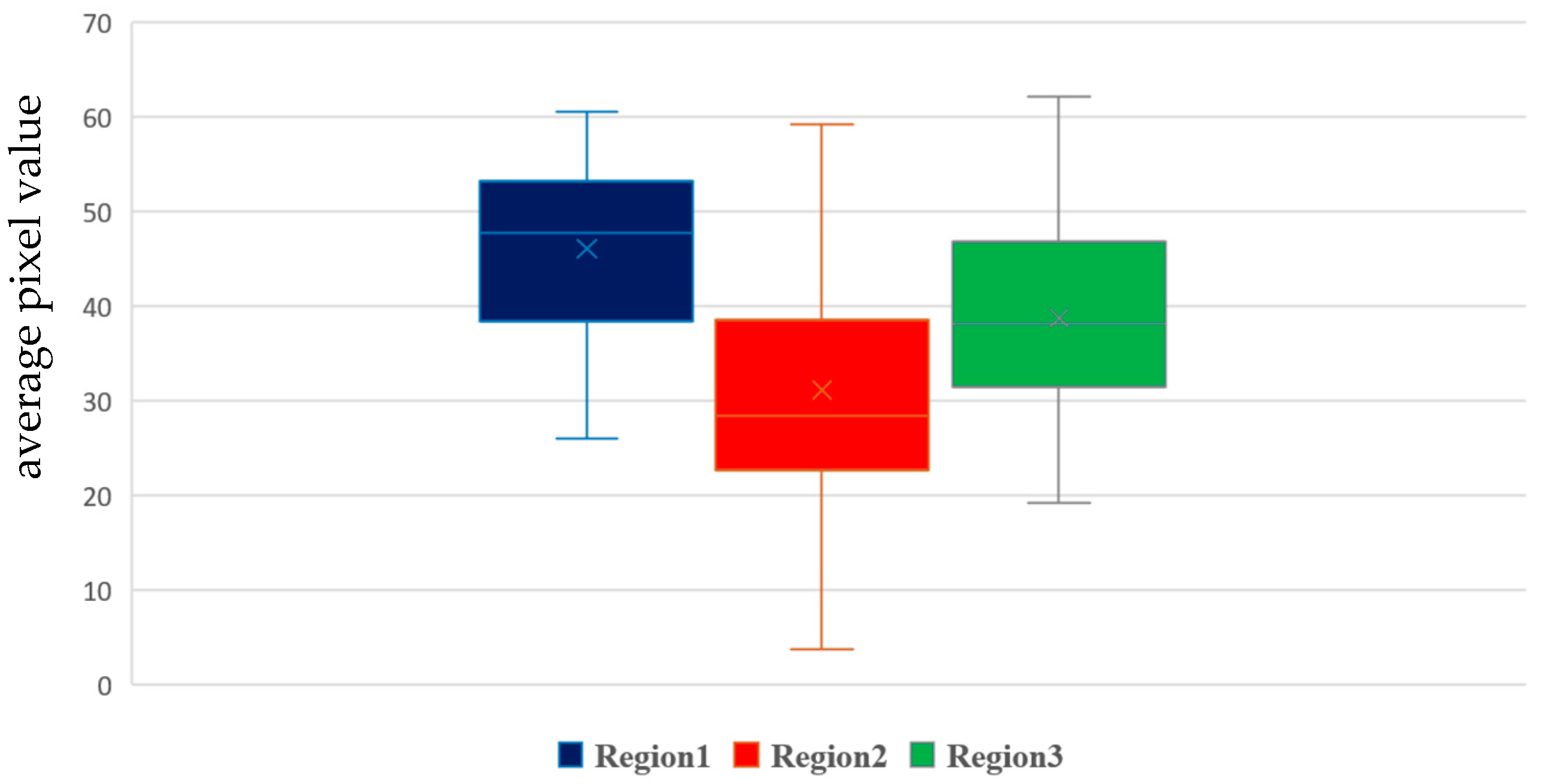
2.1.6. Final RoI Determination
2.2. Simple Linear Regression Model
2.3. Performance Indices
3. Experimental Results
3.1. Experimental Data Sets
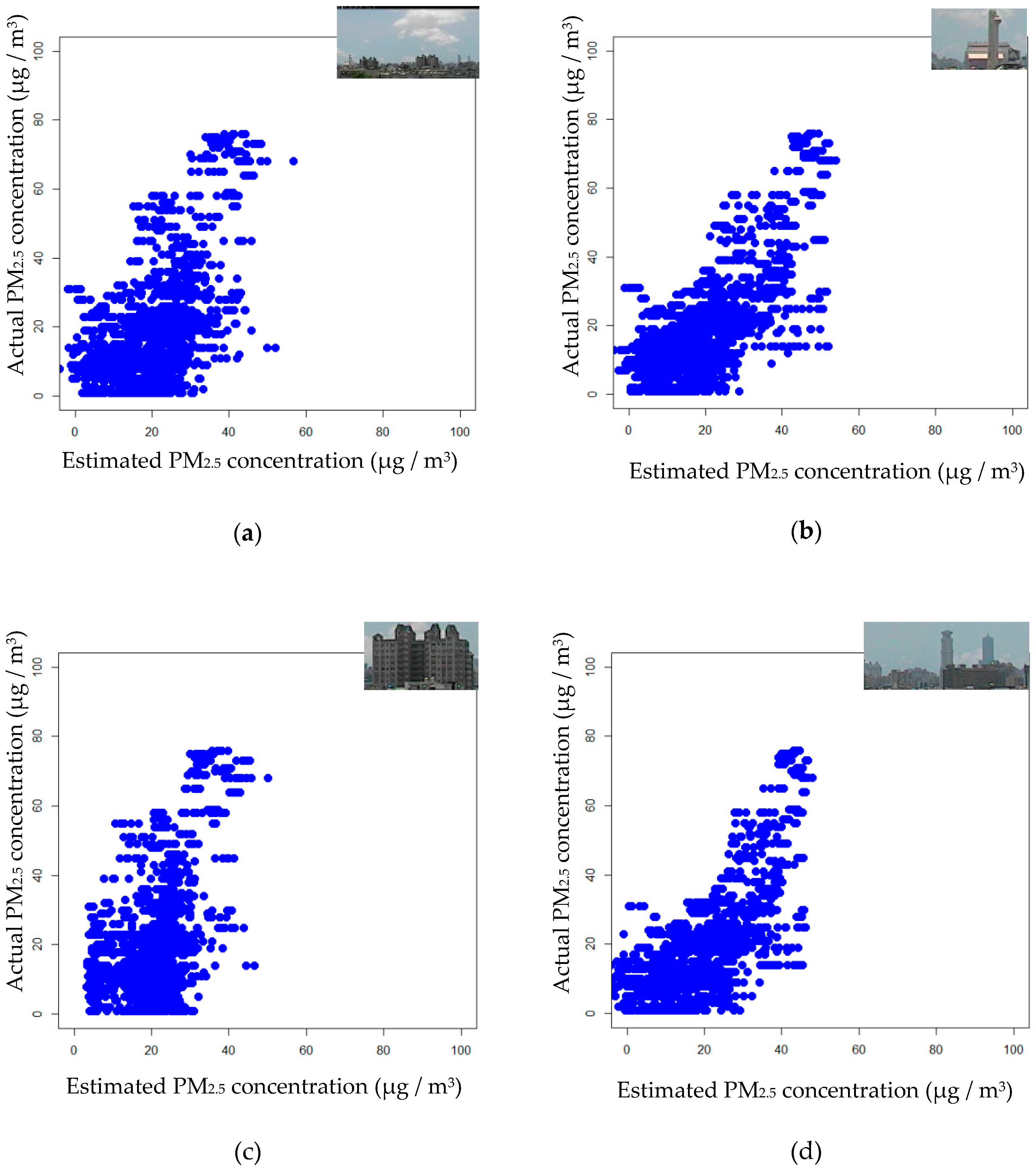
3.2. Results with All Data
3.3. Results with Unreliable Data Exclusion
4. Conclusions
- Since the proposed method uses a fixed camera to capture images at the same location, the influence of images taken in different locations on the results of this study need to be investigated further;
- Though we have shown that the performance for each candidate RoI is better than the whole image case, it is still worthy to seek a better way to find the final RoI for the performance improvement;
- In this study, sunny or rainy days are not considered and they will be researched in the future. Besides, other weather factors, such as solar conditions, will be considered in the PM2.5 concentration estimation from a higher dimension aspect.
Author Contributions
Funding
Conflicts of Interest
References
- Narasimhan, S.G.; Nayar, S.K. Vision and the atmosphere. Int. J. Comput. Vis. 2002, 48, 233–254. [Google Scholar] [CrossRef]
- Anderson, J.O.; Thundiyil, J.G.; Stolbach, A. Clearing the air: A review of the effects of particulate matter air pollution on human health. J. Med Toxicol. 2011, 8, 166–175. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raaschou-Nielsen, O.; Andersen, Z.J.; Beelen, R.; Samoli, E.; Stafoggia, M.; Weinmayr, G.; Hoffmann, B.; Fischer, P.; Nieuwenhuijsen, M.J.; Brunekreef, B.; et al. Air pollution and lung cancer incidence in 17 European cohorts: Prospective analyses from the European Study of Cohorts for Air Pollution Effects (ESCAPE). Lancet Oncol. 2013, 14, 813–822. [Google Scholar] [CrossRef]
- More than 90% of World’s Children Breathe Toxic Air, Report Says, as India Prepares for Most Polluted Season. Cable News Network. Available online: https://edition.cnn.com/2018/10/29/health/air-pollution-children-health-who-india-intl/index.html (accessed on 16 August 2019).
- Melstrom, P.; Koszowski, B.; Thanner, M.H.; Hoh, E.; King, B.; Bunnell, R.; McAfee, T. Measuring PM2.5, ultrafine particles, nicotine air and wipe samples following the use of electronic cigarettes. Nicotine Tob. Res. 2017, 19, 1055–1061. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zíková, N.; Hopke, P.K.; Ferro, A.R. Evaluation of new low-cost particle monitors for PM2.5 concentrations measurements. J. Aerosol Sci. 2016, 105, 24–34. [Google Scholar] [CrossRef]
- Hauck, H.; Berner, A.; Gomiscek, B.; Stopper, S.; Puxbaum, H.; Kundi, M.; Preining, O. On the equivalence of gravimetric PM data with TEOM and beta-attenuation measurements. Aerosol Sci. 2004, 35, 1135–1149. [Google Scholar] [CrossRef]
- Ruppecht, E.; Meyer, M.; Patashnick, H. The tapered element oscillating microbalance as a tool for measuring ambient particulate concentrations in real time. J. Aerosol Sci. 1992, 23, 635–638. [Google Scholar] [CrossRef]
- Macias, E.S.; Husar, R.B. Atmospheric particulate mass measurement with beta attenuation mass monitor. Environ. Sci. Technol. 1976, 10, 904–907. [Google Scholar] [CrossRef]
- Smith, J.D.; Atkinson, D.B. A portable pulsed cavity ring-down transmissometer for measurement of the optical extinction of the atmospheric aerosol. Analyst 2001, 126, 1216–1220. [Google Scholar] [CrossRef]
- Li, C.; He, Q.; Schade, J.; Passig, J.; Zimmermann, R.; Meidan, D.; Laskin, A.; Rudich, Y. Dynamic changes in optical and chemical properties of tar ball aerosols by atomospheric photochemical aging. Atmos. Chem. Phys. 2019, 19, 139–163. [Google Scholar] [CrossRef] [Green Version]
- Sclar, S.; Saikawa, E. Household air pollution in a changing Tibet: A mixed methods ethnography and indoor air quality measurements. Environ. Manag. 2019. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Huang, B.; He, Q.; Chen, B.; Wei, J.; Mahmood, R. Dynamic assessment of PM2.5 exposure and health risk using remote sensing and geo-spatial big data. Environ. Pollut. 2019, 253, 288–296. [Google Scholar] [CrossRef] [PubMed]
- Han, W.; Tong, L. Satellite-Based Estimation of Daily Ground-Level PM2.5 Concentrations over Urban Agglomeration of Chengdu Plain. Atmosphere 2019, 10, 245. [Google Scholar] [CrossRef] [Green Version]
- Zikova, N.; Masiol, M.; Chalupa, D.C.; Rich, D.Q.; Ferro, A.R.; Hopke, P.K. Estimating Hourly Concentrations of PM2.5 across a Metropolitan Area Using Low-Cost Particle Monitors. Sensors 2017, 17, 1992. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, M.; Cao, J.; Seto, E. A distributed network of low-cost continuous reading sensors to measure spatiotemporal variations of PM2.5 in Xi’an, China. Environ. Pollut. 2015, 199, 56–65. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Badura, M.; Batog, P.; Drzeniecka-Osiadacz, A.; Modzel, P. Evaluation of Low-Cost Sensors for Ambient PM2.5 Monitoring. J. Sens. 2018, 16. [Google Scholar] [CrossRef] [Green Version]
- McCartney, E.J. Optics of the Atmosphere: Scattering by Molecules and Particles, 1st ed.; John Wiley & Sons Inc: New York, NY, USA, 1976. [Google Scholar]
- Liu, X.; Hui, Y.; Yin, Z.Y.; Wang, Z.; Xie, X.; Fang, J. Deteriorating haze situation and the severe haze episode during December 18–25 of 2013 in Xi’an, China, the worst event on record. Theor. Appl. Climatol. 2016, 125, 321–335. [Google Scholar] [CrossRef]
- Larson, S.M.; Cass, G.R.; Hussey, K.J.; Luce, F. Verification of image processing based visibility models. Environ. Sci. Technol. 1988, 22, 629–637. [Google Scholar] [CrossRef]
- Malm, W.C.; Molenar, J.V. Visibility measurements in National Parks in the western United States. J. Air Pollut. Control Assoc. 1984, 34, 899–904. [Google Scholar] [CrossRef]
- Xie, L.; Chiu, A.; Newsam, S. Estimating Atmospheric Visibility Using General-Purpose Cameras; International Symposium on Visual Computing: Las Vegas, NV, USA, 2008. [Google Scholar]
- Shih, W.Y. Variations of Urban Fine Suspended Particulate Matter (PM2.5) from Various Environmental Factors and Sources and Its Role on Atmospheric Visibility in Taiwan. Master’s Thesis, National Central University, Taiwan, 2013. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Gelman, A.; Hill, J. Data Analysis Using Regression and Multilevel/Hierarchical Models, 1st ed.; Cambridge University Press: New York, NY, USA, 2006. [Google Scholar]
- Le, T.N.; Sun, X.; Chowdhury, M.; Liu, Z. AlloX: Allocation across Computing Resources for Hybrid CPU/GPU clusters. ACM Sigmetrics Perform. Eval. Rev. 2019, 46, 87–88. [Google Scholar] [CrossRef]
- Weichenthal, S.; Ryswyk, K.V.; Goldstein, A.; Bagg, S.; Shekkarizfard, M.; Hatzopoulou, M. A land use regression model for ambient ultrafine particles in Montreal, Canada: A comparison of linear regression and a machine learning approach. Environ. Res. 2016, 146, 65–72. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, C.; Tsow, F.; Zou, Y.; Tao, N. Particle pollution estimation based on image analysis. PLoS ONE 2016, 11, e0145955. [Google Scholar] [CrossRef] [PubMed]
- Jin, S.; Kim, W.; Jeong, J. Fine directional de-interlacing algorithm using modified Sobel operation. IEEE Trans. Consum. Electron. 2008, 54, 587–862. [Google Scholar] [CrossRef]
- Goh, T.Y.; Basah, S.N.; Yazid, H.; Safar, M.J.A.; Saad, F.S.A. Performance analysis of image thresholding: Otsu technique. Measurement 2018, 114, 298–307. [Google Scholar] [CrossRef]
- Dougherty, E.R.; Lotufo, R.A. Hands-on Morphological Image Processing, 3rd ed.; SPIE Press: Washington, DC, USA, 2003. [Google Scholar]
- Markowski, C.A.; Markowski, E.P. Conditions for the effectiveness of a preliminary test of variance. Am. Stat. 1990, 44, 322–326. [Google Scholar]
- Environmental Protection Administration Executive Yuan, R.O.C., Taiwan. Available online: https://taqm.epa.gov.tw/taqm/tw/YearlyDataDownload.aspx (accessed on 16 August 2019).
- Swietlicki, E.; Zhou, J.; Berg, O.H.; Martinsson, B.; Frank, G.; Cederfelt, S.I.; Ulrike, D.; Berner, A.; Birmili, W.; Wiedensohler, A.; et al. A closure study of sub-micrometer aerosol particle hygroscopic behavior. Atmos. Res. 1999, 50, 205–240. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R2 | F-test | ||
|---|---|---|---|
| Whole image | 14.54 | 0.11 | p < 0.0001 |
| Region 1 | 11.88 | 0.41 | p < 0.0001 |
| Region 2 | 13.53 | 0.23 | p < 0.0001 |
| Region 3 | 12.55 | 0.34 | p < 0.0001 |
| R2 | F-test | ||
|---|---|---|---|
| Whole image | 13.17 | 0.22 | p < 0.0001 |
| Region 1 | 8.67 | 0.73 | p < 0.0001 |
| Region 2 | 11.51 | 0.34 | p < 0.0001 |
| Region 3 | 10.76 | 0.65 | p < 0.0001 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liaw, J.-J.; Huang, Y.-F.; Hsieh, C.-H.; Lin, D.-C.; Luo, C.-H. PM2.5 Concentration Estimation Based on Image Processing Schemes and Simple Linear Regression. Sensors 2020, 20, 2423. https://doi.org/10.3390/s20082423
Liaw J-J, Huang Y-F, Hsieh C-H, Lin D-C, Luo C-H. PM2.5 Concentration Estimation Based on Image Processing Schemes and Simple Linear Regression. Sensors. 2020; 20(8):2423. https://doi.org/10.3390/s20082423
Chicago/Turabian StyleLiaw, Jiun-Jian, Yung-Fa Huang, Cheng-Hsiung Hsieh, Dung-Ching Lin, and Chin-Hsiang Luo. 2020. "PM2.5 Concentration Estimation Based on Image Processing Schemes and Simple Linear Regression" Sensors 20, no. 8: 2423. https://doi.org/10.3390/s20082423
APA StyleLiaw, J. -J., Huang, Y. -F., Hsieh, C. -H., Lin, D. -C., & Luo, C. -H. (2020). PM2.5 Concentration Estimation Based on Image Processing Schemes and Simple Linear Regression. Sensors, 20(8), 2423. https://doi.org/10.3390/s20082423