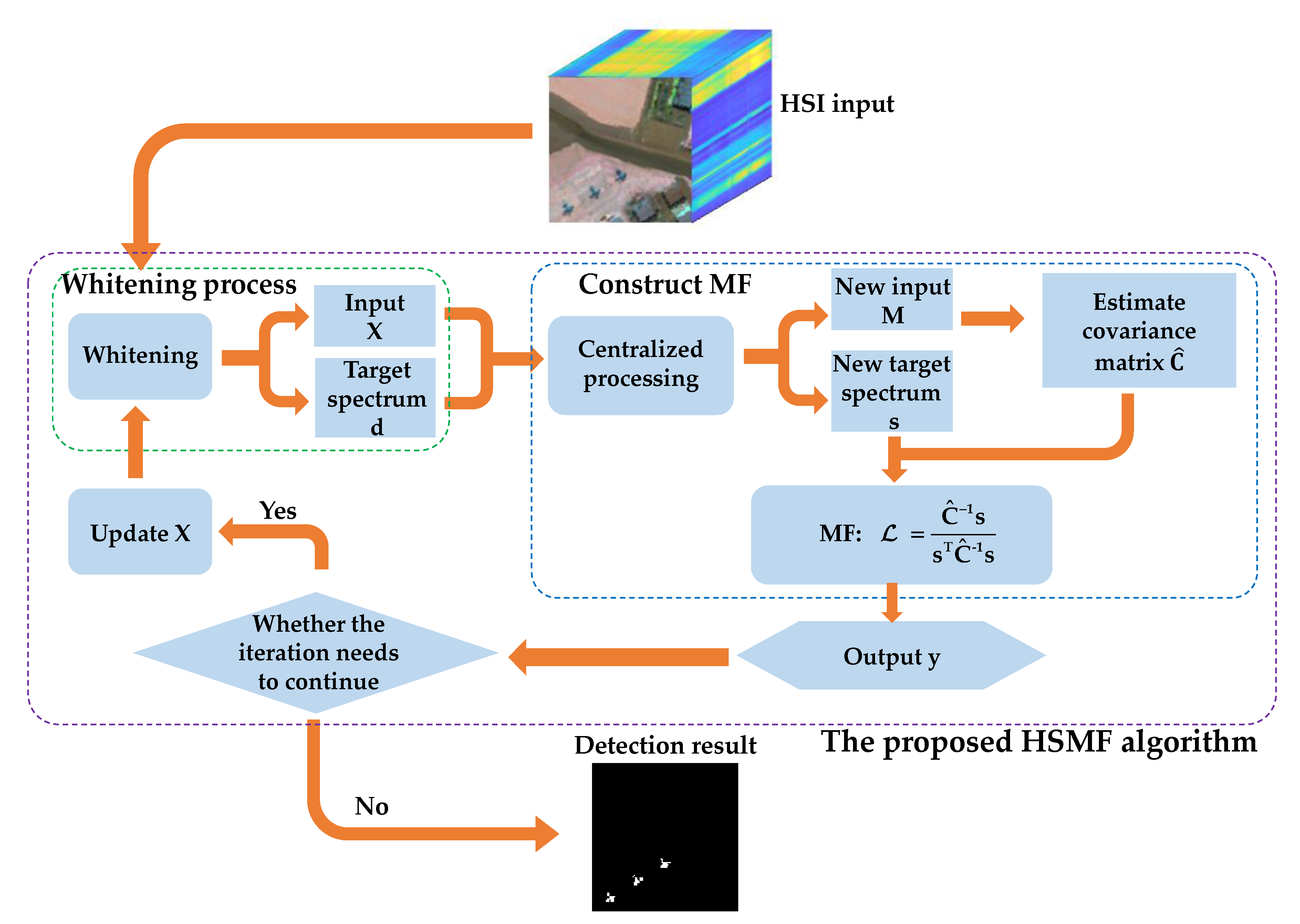
Figure 1.
Flowchart of the proposed hierarchical background suppression on the matched filter detector (HSMF).
Figure 1.
Flowchart of the proposed hierarchical background suppression on the matched filter detector (HSMF).
Figure 2.
The original spectral observation space is shown at the left, and the whitened space with spherical covariance, created by the whitening transformation, is shown at the right. and represent the background and the target in the original spectral observation space, respectively. and represent the background and the target in whitened space, respectively. There is an aliasing area in the original spectral observation space. Both the target and background are considered as Gaussian distribution. The green dotted line works as a decision boundary.
Figure 2.
The original spectral observation space is shown at the left, and the whitened space with spherical covariance, created by the whitening transformation, is shown at the right. and represent the background and the target in the original spectral observation space, respectively. and represent the background and the target in whitened space, respectively. There is an aliasing area in the original spectral observation space. Both the target and background are considered as Gaussian distribution. The green dotted line works as a decision boundary.
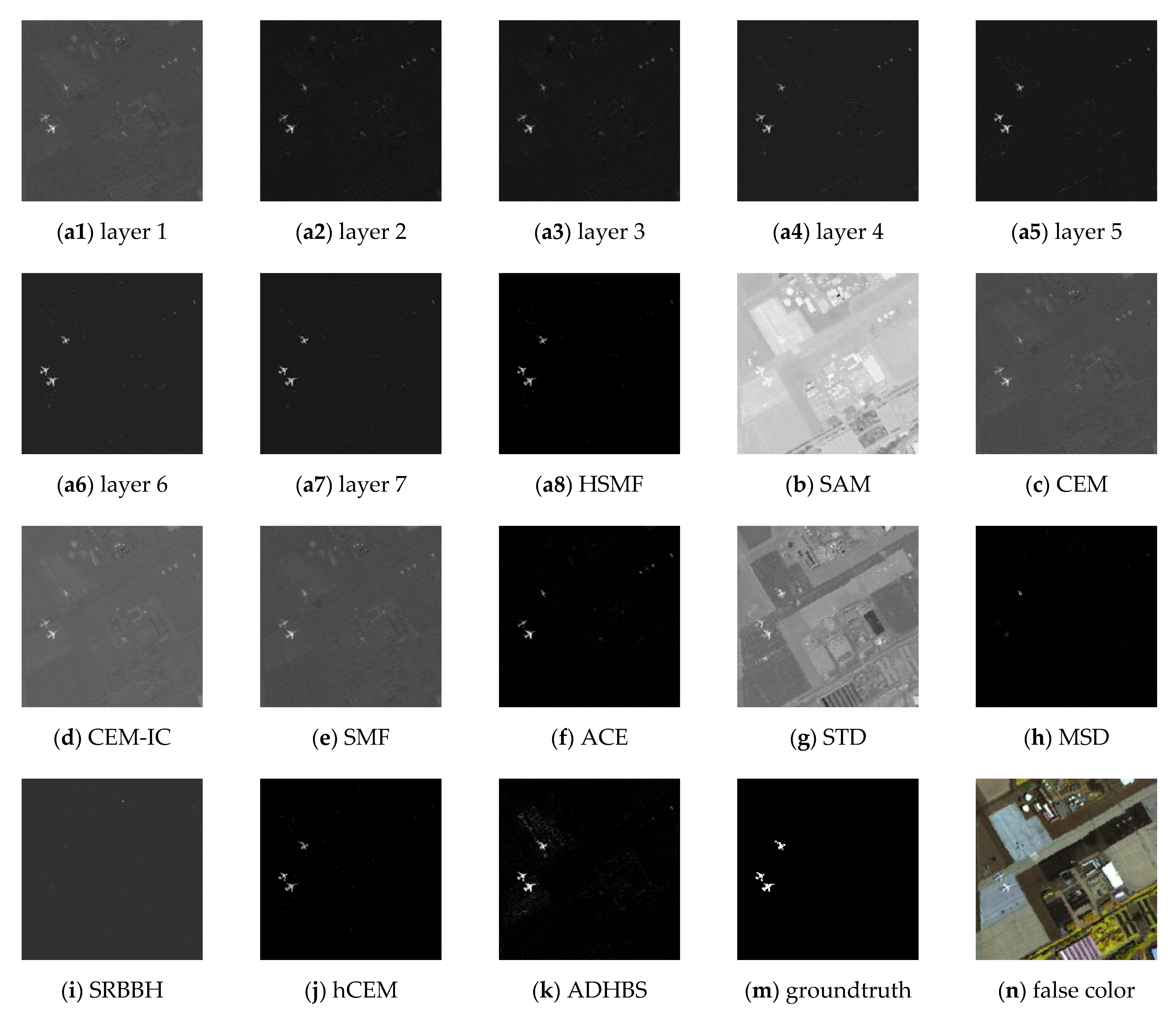
Figure 3.
Detection results of different detectors on the San Diego Airport data. (a1–a7): results of HSMF for the first to the seventh layers. (a8): The final result of HSMF. (b–k): Results of spectral angle mapper (SAM), constrained energy minimization (CEM), inequality constraint on CEM (CEM-IC), spectral matched filter (SMF), adaptive coherence estimator (ACE), sparsity-based target detector (STD), matched subspace detector (MSD), sparse representation-based binary hypothesis (SRBBH), hierarchical CEM (hCEM), and angle distance-based hierarchical background separation (ADHBS). (m): The groundtruth information. (n) The false color image (bands 11, 40, 88).
Figure 3.
Detection results of different detectors on the San Diego Airport data. (a1–a7): results of HSMF for the first to the seventh layers. (a8): The final result of HSMF. (b–k): Results of spectral angle mapper (SAM), constrained energy minimization (CEM), inequality constraint on CEM (CEM-IC), spectral matched filter (SMF), adaptive coherence estimator (ACE), sparsity-based target detector (STD), matched subspace detector (MSD), sparse representation-based binary hypothesis (SRBBH), hierarchical CEM (hCEM), and angle distance-based hierarchical background separation (ADHBS). (m): The groundtruth information. (n) The false color image (bands 11, 40, 88).
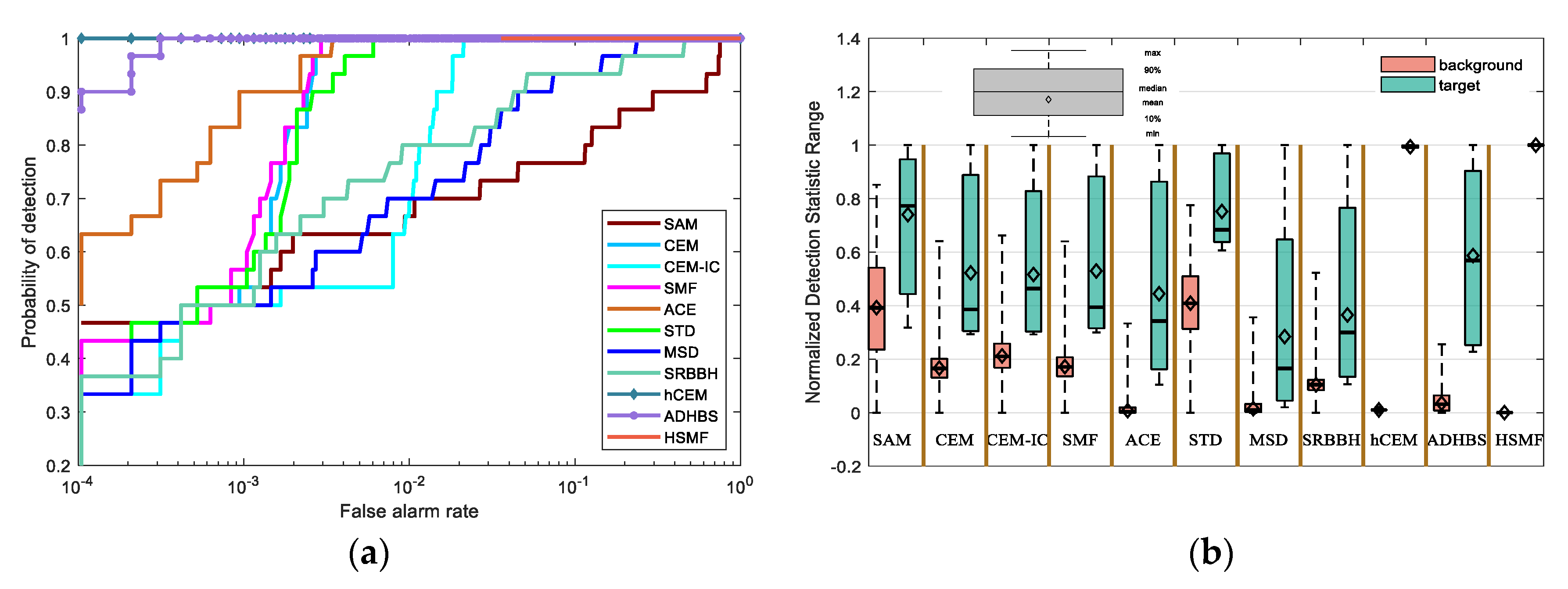
Figure 4.
(a) The receiver operating characteristic (ROC) curves of different detectors on the San Diego Airport data. (b) The separability map of all detectors for the San Diego Airport data.
Figure 4.
(a) The receiver operating characteristic (ROC) curves of different detectors on the San Diego Airport data. (b) The separability map of all detectors for the San Diego Airport data.
Figure 5.
Detection results of the Airport-Beach-Urban data. (a1–a5): Results of HSMF for the first to the fifth layers. (a6): The final result of HSMF. (b–k): Results of SAM, CEM, CEM-IC, SMF, ACE, STD, MSD, SRBBH, hCEM, and ADHBS. (m): The groundtruth information. (n) The false color image (bands 23, 56, 72).
Figure 5.
Detection results of the Airport-Beach-Urban data. (a1–a5): Results of HSMF for the first to the fifth layers. (a6): The final result of HSMF. (b–k): Results of SAM, CEM, CEM-IC, SMF, ACE, STD, MSD, SRBBH, hCEM, and ADHBS. (m): The groundtruth information. (n) The false color image (bands 23, 56, 72).
Figure 6.
(a) ROC curves of different detectors on the Airport-Beach-Urban data. (b) The separability map of all detectors for the Airport-Beach-Urban data.
Figure 6.
(a) ROC curves of different detectors on the Airport-Beach-Urban data. (b) The separability map of all detectors for the Airport-Beach-Urban data.
Figure 7.
Detection results of different algorithms on the Urban data. (a1–a6): Results of HSMF for the first to the sixth layers. (a7): The final result of HSMF. (b–k): Results of SAM, CEM, CEM-IC, SMF, ACE, STD, MSD, SRBBH, hCEM, and ADHBS. (m): The groundtruth information. (n) The false color image (bands 7, 48, 144).
Figure 7.
Detection results of different algorithms on the Urban data. (a1–a6): Results of HSMF for the first to the sixth layers. (a7): The final result of HSMF. (b–k): Results of SAM, CEM, CEM-IC, SMF, ACE, STD, MSD, SRBBH, hCEM, and ADHBS. (m): The groundtruth information. (n) The false color image (bands 7, 48, 144).
Figure 8.
(a) ROC curves of different detectors on the Urban data. (b) The separability map of all detectors for the Urban data.
Figure 8.
(a) ROC curves of different detectors on the Urban data. (b) The separability map of all detectors for the Urban data.
Figure 9.
The average energy of HSMF with different layers on three hyperspectral data.
Figure 9.
The average energy of HSMF with different layers on three hyperspectral data.
Figure 10.
Output mean value of different layers on three hyperspectral data.
Figure 10.
Output mean value of different layers on three hyperspectral data.
Figure 11.
The effects of the different suppression criteria on the San Diego Airport data. The suppression criteria used in the comparative experiments are one-eighth mean, quarter mean, mean, one-half mean, and three-quarter mean. (a) The average output energy of different layers for different suppression criteria. (b) The ROC curves comparison for different suppression criteria.
Figure 11.
The effects of the different suppression criteria on the San Diego Airport data. The suppression criteria used in the comparative experiments are one-eighth mean, quarter mean, mean, one-half mean, and three-quarter mean. (a) The average output energy of different layers for different suppression criteria. (b) The ROC curves comparison for different suppression criteria.
Figure 12.
The effects of the different β values on the San Diego Airport data. We choose 10 different values for comparison, including 0.5, 0.4, 0.3, 0.25, 0.2, 0.1, 0.01, 0.005, 0.0005, and 0.0001. (a) The ROC curves comparison for different β values. (b) The average output energy of different layers for different β values.
Figure 12.
The effects of the different β values on the San Diego Airport data. We choose 10 different values for comparison, including 0.5, 0.4, 0.3, 0.25, 0.2, 0.1, 0.01, 0.005, 0.0005, and 0.0001. (a) The ROC curves comparison for different β values. (b) The average output energy of different layers for different β values.
Figure 13.
(a) The mean value of all pixels’ suppression coefficient in different layers on three different datasets. (b) The ROC curves comparison for different ε values where ε value contains 0.4, 0.2, 0.05, 0.01, 0.007, 0.006, and 0.005.
Figure 13.
(a) The mean value of all pixels’ suppression coefficient in different layers on three different datasets. (b) The ROC curves comparison for different ε values where ε value contains 0.4, 0.2, 0.05, 0.01, 0.007, 0.006, and 0.005.
Table 1.
Area under the receiver operating characteristic (ROC) curves (AUC) values and AUC values at lower false alarm rate (FAR) of all detectors for the San Diego Airport data.
Table 1.
Area under the receiver operating characteristic (ROC) curves (AUC) values and AUC values at lower false alarm rate (FAR) of all detectors for the San Diego Airport data.
| Algorithm | SAM | CEM | CEM-IC | SMF | ACE | STD |
| AUC | 0.9860 | 0.9905 | 0.9941 | 0.9904 | 0.9772 | 0.8441 |
| AUC (lower FAR) | 0.1768 | 0.4990 | 0.4485 | 0.5017 | 0.5406 | 0.0868 |
| Algorithm | MSD | SRBBH | hCEM | ADHBS | HSMF | |
| AUC | 0.9687 | 0.8649 | 0.9924 | 0.99991 | 0.9925 | |
| AUC (lower FAR) | 0.2903 | 0.0941 | 0.9562 | 0.9470 | 0.95871 | |
Table 2.
AUC values and AUC values at lower FAR of all detectors for the Airport-Beach-Urban data.
Table 2.
AUC values and AUC values at lower FAR of all detectors for the Airport-Beach-Urban data.
| Algorithm | SAM | CEM | CEM-IC | SMF | ACE | STD |
| AUC | 0.9972 | 0.9994 | 0.9968 | 0.9994 | 0.9995 | 0.7695 |
| AUC (lower FAR) | 0.4081 | 0.7564 | 0.1325 | 0.7585 | 0.7560 | 0.0321 |
| Algorithm | MSD | SRBBH | hCEM | ADHBS | HSMF | |
| AUC | 0.9503 | 0.7994 | 1.0000 | 1.0000 | 1.0000 | |
| AUC (lower FAR) | 0.3462 | 0.1572 | 1.0000 | 1.0000 | 1.0000 | |
Table 3.
AUC values and AUC values at lower FAR of all detectors for the Urban data.
Table 3.
AUC values and AUC values at lower FAR of all detectors for the Urban data.
| Algorithm | SAM | CEM | CEM-IC | SMF | ACE | STD |
| AUC | 0.9020 | 0.9990 | 0.9940 | 0.9991 | 0.9996 | 0.9988 |
| AUC (lower FAR) | 0.4778 | 0.4593 | 0.4296 | 0.4667 | 0.7259 | 0.4667 |
| Algorithm | MSD | SRBBH | hCEM | ADHBS | HSMF | |
| AUC | 0.9779 | 0.9719 | 1.0000 | 0.9998 | 1.0000 | |
| AUC (lower FAR) | 0.4519 | 0.4259 | 1.0000 | 0.8593 | 1.0000 | |
Table 4.
Time performances of different detectors on the three datasets (keep four decimal places in the units of seconds).
Table 4.
Time performances of different detectors on the three datasets (keep four decimal places in the units of seconds).
| Algorithms | San Diego Airport | Airport-Beach-Urban | Urban |
|---|
| Total Time | Time/Layer | Total Time | Time/Layer | Total Time | Time/Layer |
|---|
| SAM | 0.0576 | 0.0576 | 0.0249 | 0.0249 | 0.0177 | 0.0177 |
| CEM | 0.1659 | 0.1659 | 0.0402 | 0.0402 | 0.0278 | 0.0278 |
| CEM_IC | 0.4060 | 0.4060 | 0.2855 | 0.2855 | 0.2016 | 0.2016 |
| SMF | 0.2054 | 0.2054 | 0.0591 | 0.0591 | 0.0487 | 0.0487 |
| ACE | 0.5949 | 0.5949 | 0.0815 | 0.0815 | 0.0936 | 0.0936 |
| STD | 76.5828 | 76.5828 | 17.8557 | 17.8557 | 17.5028 | 17.5028 |
| MSD | 369.7743 | 369.7743 | 92.2054 | 92.2054 | 68.2234 | 68.2234 |
| SRBBH | 59.1558 | 59.1558 | 10.8585 | 10.8585 | 14.2643 | 14.2643 |
| hCEM | 3.8807(15) 1 | 0.2587 | 1.2482(8) | 0.1560 | 1.1822(8) | 0.1478 |
| ADHBS | 4.3435(11) | 0.3949 | 2.6310(17) | 0.1547 | 3.3069(22) | 0.1503 |
| HSMF | 4.2831(7) | 0.6119 | 1.3298(5) | 0.2659 | 1.2975(6) | 0.2163 |
Table 5.
The number of iterations and detection performance for different β values.
Table 5.
The number of iterations and detection performance for different β values.
| Suppression coefficient β | 0.5 | 0.4 | 0.3 | 0.25 | 0.2 |
| AUC | 0.9851 | 0.9851 | 0.9925 | 0.9925 | 0.9925 |
| AUC (lower FAR) | 0.9638 | 0.9638 | 0.9476 | 0.9443 | 0.9592 |
| Number of iterations | 35 | 27 | 26 | 23 | 21 |
| Suppression coefficient β | 0.1 | 0.01 | 0.005 | 0.0005 | 0.0001 |
| AUC | 0.9925 | 0.9925 | 0.9925 | 0.9925 | 0.9925 |
| AUC (lower FAR) | 0.9742 | 0.9310 | 0.9409 | 0.9562 | 0.9599 |
| Number of iterations | 16 | 16 | 16 | 16 | 16 |
Table 6.
The number of iterations and detection performance for different ε values.
Table 6.
The number of iterations and detection performance for different ε values.
| Threshold value ε | 0.4 | 0.2 | 0.05 | 0.01 | 0.007 | 0.006 | 0.005 |
| AUC | 0.9904 | 0.9906 | 0.9922 | 0.9925 | 0.9925 | 0.9925 | 0.9925 |
| AUC (lower FAR) | 0.5599 | 0.6359 | 0.8718 | 0.9587 | 0.9698 | 0.9670 | 0.9599 |
| Layer number | 1 | 2 | 4 | 7 | 9 | 11 | NaN 1 |















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}