1. Introduction
Oil-immersed power transformers are among the most expensive and essential pieces of equipment in power systems [
1,
2,
3]. During operation, oil-immersed transformers are subjected to various stresses, such as electrical, thermal, chemical, and mechanical stresses, which can lead to the aging and deterioration of their insulation. In addition, the insulation degradation or moisture generated by the external environment can accelerate the aging process, reduce the dielectric strength, and lower the partial discharge initiation voltage. Insulation defects are the most common cause of failure in excitation transformers and directly affect the reliability of the equipment [
4,
5]. In today’s increasingly large power demand, if a power transformer fails, it will likely cause an interruption of power supply to the energy system and bring significant economic losses. Therefore, being able to quickly and accurately diagnose the type of faults during transformer operation has become an important issue in promoting the smart grid process.
Currently, the dissolved gas analysis (DGA) method has been widely used in the fault diagnosis of oil-immersed transformers [
6,
7]. The occurrence of mechanical, electrical, and thermal faults in an oil-immersed power transformer leads to the degradation of the insulating oil and the increase in some gases. The causes of gas generation include corona (partial discharge), low energy sparks, arcing, cellulose overheating, and insulation overheating. In this case, gases such as carbon monoxide (CO), carbon dioxide (CO
), hydrogen (H
), methane (CH
), ethane (C
H
), ethylene (C
H
), and acetylene (C
H
) are dissolved in the oil in different proportions. Although the oil contains oxygen (O
) and nitrogen (N
), they enter the transformer from outside and are not related to the degradation of the insulating oil [
8]. Therefore, through intelligent sensors and in order to obtain dissolved gas data in the oil and analyze it, we can achieve a real-time view of the operating conditions of the transformer to quickly and efficiently check the internal hidden problems and faults of the transformer [
9,
10]. Currently, the classical fault diagnosis methods based on DGA data include Doernenburg [
11], Rogers [
12], IEC 599 [
13] and IEC 60599 [
14,
15]. They attempt to study the hydrogen (H
), methane (CH
), ethane (C
H
), ethylene (C
H
), and acetylene (C
H
) gas concentrations and the relationships between them, and then evaluate the transformer operating conditions according to various pre-defined thresholds [
16].
Although the methods above are easy to apply, they require a large amount of engineering experience, are not sufficiently generalized, and their fault detection accuracy is limited. Thus, they may not be reliable enough for predicting fault types [
17]. To improve the fault diagnosis accuracy to meet the current industrial demand, scholars in related fields have combined traditional fault diagnosis methods with emerging artificial intelligence technologies to improve the accuracy of fault diagnosis significantly. A series of classical statistical learning methods such as hidden Markov models (HMM) [
18], support vector machine (SVM) [
19], k-nearest neighbor (KNN) [
20], etc., are applied to process DGA data to improve the accuracy of fault diagnosis. With the continuous development of data-driven technologies, new machine learning methods with better performance are combined with traditional fault diagnosis methods to achieve excellent diagnostic results. Wang et al. [
21] improved the traditional fault diagnosis method, i.e., the dielectric response method. Low-frequency dielectric parameters were first extracted using mixed-frequency excitation. Then, the extended Debye equivalent circuit parameters were determined using the cuckoo search (CS) optimization algorithm. Finally, the specific parameters were used for testing to establish a simulation model and obtain a recovery voltage curve. Compared with the traditional method, this method greatly reduces the test time. To cope with the high uncertainty and variability of DGA data, Kirkbas et al. [
22] used the information-rich feature data set obtained by spectral techniques along with the common vector approach (CVA) for the fault mode identification of DGA data. The CVA-based method is well suited and has better fault diagnosis performance than the traditional SVM-PSO method, as demonstrated by examples. Jiang et al. [
23] proposed lasso regression to build a multidimensional linear model of the selected features. The change point detection method based on lasso regression is based on the minimum days and standard deviation (SD) between the change point and fault time, which accurately reflects the location of the transformer fault in most cases. The method provides an effective method for dynamic fault prediction based on dissolved gas data with the advantages of robustness and no data training. The application of an artificial neural network (ANN) in the field of fault diagnosis of oil-immersed transformers [
24] has led to a significant improvement in the reliability of diagnosis. Meanwhile, optimization schemes for a neural network are becoming more abundant and mature. Yang et al. [
17] proposed a power transformer fault diagnosis system combining a polynomial logistic regression model and a back propagation neural network (BPNN) to determine the type of transformer faults by analyzing the dissolved gases in the transformer. The test results show that this intelligent fault diagnosis system’s recognition rate is about 10–30% higher than that of the single neural network or multi-neural network recognition system without a polynomial logistic regression model. Huang and Wang et al. [
25] proposed a transformer fault diagnosis method based on the gray wolf optimization (GWO) algorithm to optimize the hybrid kernel function learning machine. The parameters of the hybrid kernel function can be optimized using the GWO algorithm. Simultaneously, the initial population parameters of the GWO algorithm are generated by using chaotic logistic mapping to avoid the adverse effects of overly fast convergence on the optimization results, which effectively improves the classification accuracy. Dai et al. [
26] developed an oil-immersed fault diagnosis model based on a deep belief network (DBN) and compared the performance of the method with the support vector machine (SVM), back propagation neural network (BPNN), and ratio method. The results show that the method significantly improves the accuracy of power transformer fault diagnosis. Ou et al. [
27] proposed a dynamic Adam and dropout-based deep neural network (DADDNN) for oil-immersed power transformer fault diagnosis. Ou et al. utilized the dropout technique to randomly reset some neurons to prevent overfitting and indirectly enhanced the information exchange between them.
It is clear that ANN has promising applications in fault diagnosis. There are many different types of ANN available for classification tasks. Probabilistic neural network (PNN), as a radial neural network, has a strong fault tolerance. PNN can converge to a Bayesian classifier as long as sufficient sample data are available, which is more efficient than other network models such as the multi-layer perceptron (MLP) and the back propagation neural network (BPNN). In addition, PNN has some advantages in solving multi-classification problems [
28,
29].
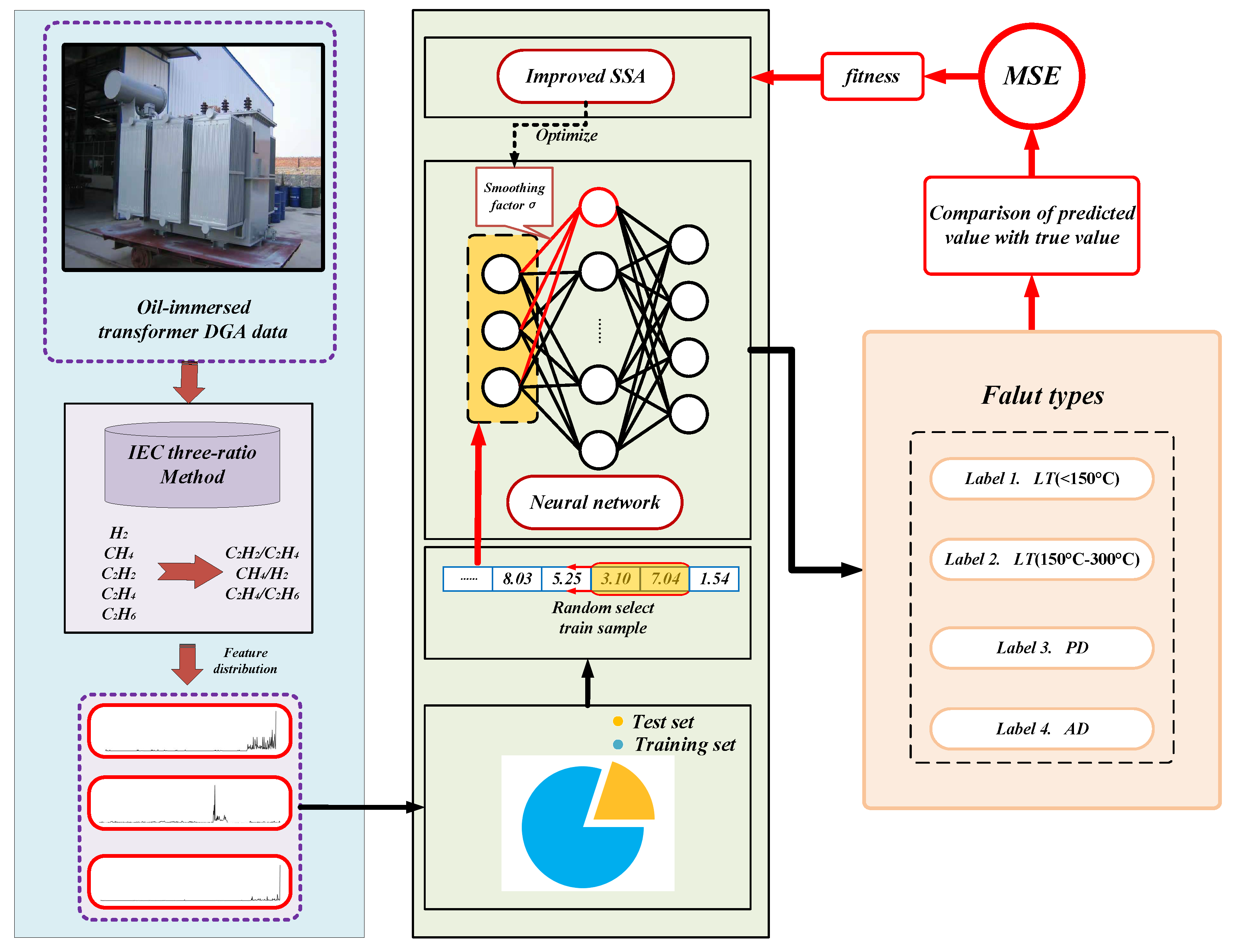
In this paper, PNN was chosen as the basis for the fault diagnosis classifier. Since the classification performance of PNN is easily affected by the smoothing factor (
) of the hidden layer [
30], the selection of the smoothing factor (
) can make the network converge too quickly and lead to a significant decrease in classification accuracy. Therefore, we used the improved salp swarm algorithm (ISSA) optimized by the sine cosine algorithm (SCA) and disruption operator (D
) to filter the smoothing factor (
). SCA introduces the update mechanism of SSA, which enhances the exploration capability and reduces the possibility of getting into the local optimum. The disruption operator (D
) was used to improve the population diversity and maintain the balance between exploration and exploitation processes. To verify whether the ISSA-PNN model is applicable to the field of oil-immersed transformer fault diagnosis, we compared it with traditional fault diagnosis methods and other intelligent algorithm models based on the same set of DGA data. The experimental results show that ISSA has a better performance on the DGA experimental data set than the traditional SSA. The ISSA-PNN method outperformed other methods in terms of accuracy, diagnosis efficiency, and robustness compared with other fault diagnosis methods.
The rest of the paper is organized as follows:
Section 2 describes the proposed method. In
Section 3, the transformer fault diagnosis model is described.
Section 4 presents the experimental results, and
Section 5 discusses them. Finally, the conclusion is drawn in
Section 6.
4. The Experimental Results
We performed simulation training on the MATLAB platform with the same test set and training set. We compared it with five other modified PNN methods and traditional PNN, and the results of each failure and average accuracy are shown in
Table 6. It can be seen that the average accuracy of ISSA-PNN is 99.65%, which is higher than the other methods: SSA-PNN 97.37%; MVO-PNN 97.02%; BA-PNN 96.52%; SOA-PNN 95.80%; PSO-PNN 94.49%; and PNN 86.70%. In addition, the ISSA-PNN method only has error cases at LT (<150 °C) with an accuracy of 98.59%.
Moreover, to further prove the excellence of the proposed method, we compared it with the excellent methods proposed by other researchers and some classical methods. The comparison results are shown in
Table 7. It can be seen that the average accuracy of ISSA-PNN is also superior to other methods, although ISSA-PNN (98.59%) is inferior to BA-BP (99.06%) and GA-BP (99.06%) methods in LT (<150 °C) faults. However, the remaining three fault types’ performance is much better than BA-BP and GA-BP, so the combined performance of ISSA-PNN is still the best, proving the excellent performance of the proposed method in a power transformer fault diagnosis.
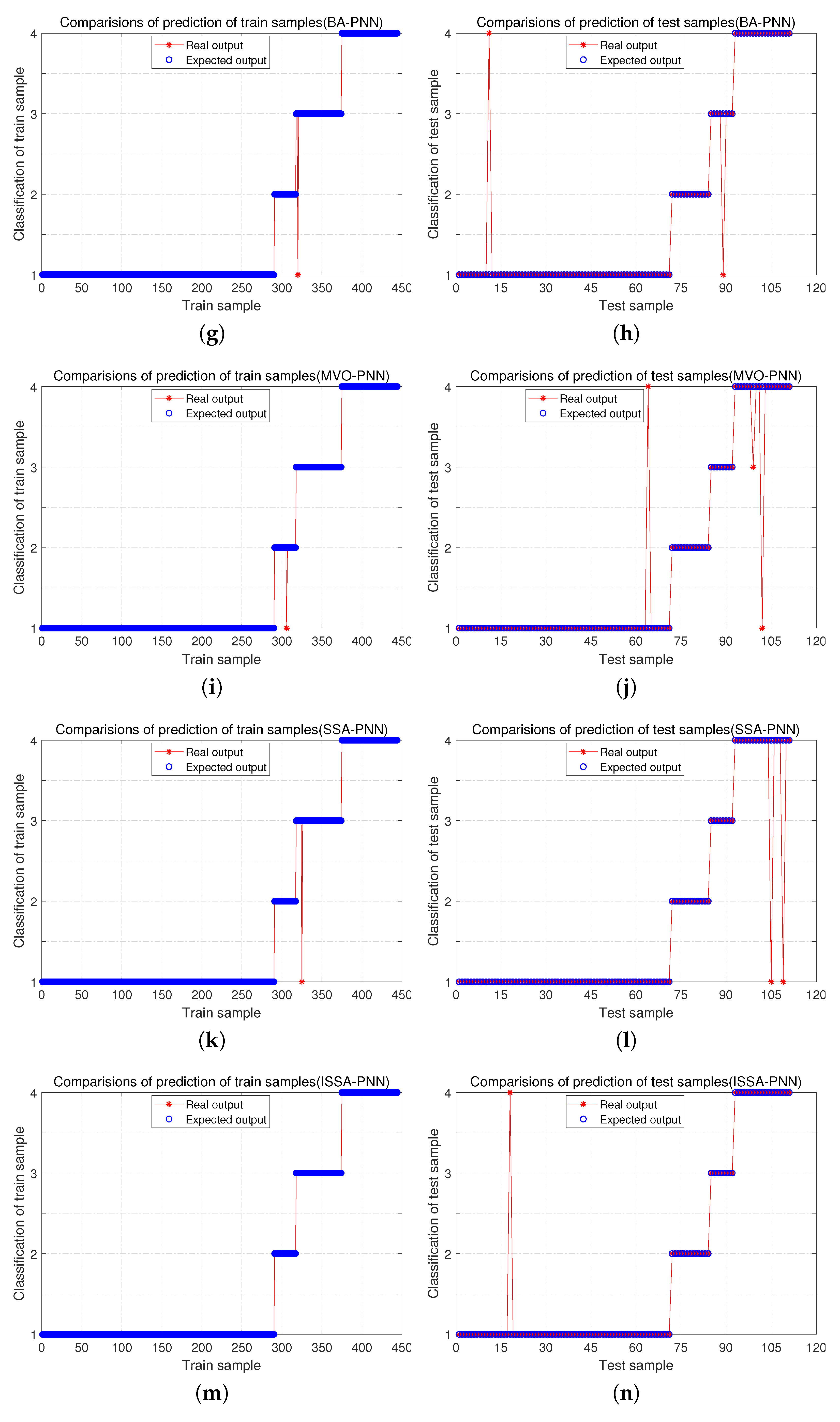
Figure 5 shows the classification results of different methods on data samples after training, where subgraphs a, c, e, g, i, k, m are the classification results of training samples, and subgraphs b, d, f, h, j, l, n are the classification results of test samples.
The confusion matrix is one of the crucial tools for evaluating classification models. We plotted the confusion matrix of various methods to compare the performance of each method, as shown in
Figure 6. The target classes 1, 2, 3, and 4 in the subgraphs refer to LT (<150 °C), LT (150–300 °C), PD, and AD, respectively. In addition, the rightmost column of the subgraph is the precision (or positive predictive value), and the bottom row is the recall (or true positive rate). It is worth noting that the lower right cell indicates the overall accuracy, which is different from the average accuracy in
Table 6 and
Table 7.
According to the confusion matrix in
Figure 6, the F1-score corresponding to each method can be calculated, which is one of the critical indicators for evaluating classification models, and the calculation results are shown in
Table 8. It can be seen from
Table 8 that the F1-score of the four-fault types of ISSA-PNN are 99.29%; 100.00%; 100.00%; 97.44%; and the Marco F1-score is 99.18%, which are higher than the other method models.
The comparison of MSE for different methods is shown in
Table 9.
Figure 7 shows the change curve of the fitness of different algorithms in the optimization process for PNN, which can well show the optimization process of various algorithms for comparison.
5. Discussion
As can be seen from
Table 6 and
Table 7 regarding the comparison in terms of accuracy, ISSA-PNN has the best overall performance among all four faults, both compared with various optimized PNN methods and with other excellent improved neural network methods, and is only slightly inferior to BA-BP and GA-BP in LT (<150 °C) faults. Except for LT (<150 °C) fault, ISSA-PNN is clearly the best in the remaining three faults and the final average accuracy, especially in AD fault diagnosis where the accuracy is generally low, ISSA-PNNN still maintains 100% accuracy.
Figure 5 shows that the performance of other algorithms in training samples and test samples is not ideal, and there are generally multiple errors. Many algorithms perform well during training, and once they switch to test samples for model testing, there is a sudden increase in errors, which indicates that these algorithms are less robust to the point that they fall into overfitting during training. From
Figure 5m,n, it can be seen that ISSA-PNN has no error in training samples, and the results are ideal. In the test samples, only errors are generated in the first type of faults, and the classification of the remaining faults is correct. This indicates that the proposed method not only has good accuracy but also has strong robustness and does not easily fall into overfitting during the training process which degrades the model performance.
In
Table 8, the F1-score of the ISSA-PNN method is the highest, consistent with the accuracy assessment results, indicating that the accuracy assessment results have high reliability. It was also fully demonstrated that ISSA-PNN has the best comprehensive performance in power transformer fault diagnosis and can meet various engineering needs in terms of precision and recall.
In
Table 9, ISSA-PNN performs the best in training with the MSE of 0. Moreover, ISSA-PNN does not have the same as the GA-BP method: the MSE during training is very low, second only to ISSA-PNN (0.005), but it falls into overfitting, and its performance during testing is not satisfactory (only 0.19030). The result indicates that ISSA-PNN can learn the internal laws implied by the data more quickly and effectively, has excellent generalization ability and self-regulation ability, and can better cope with the interference of various random noises in practical applications.
As can be seen in
Figure 7, for ISSA-PNN, its fitness starts decreasing at the fourth iteration, and falls into the local optimum at the fifth iteration, and then jumps out of the local optimum at the sixth iteration to continue the optimization search, and finally reaches the global optimum at the seventh iteration. In contrast, other optimization algorithms take several iterations to struggle to jump out of the local optimum. Most of the decreases in the fitness of each iteration are not as large as those of the ISSA algorithm. It can be seen that compared with the original SSA algorithm and other algorithms for PNN optimization, ISSA has a robust global search capability and can quickly jump out of the local optimum without getting trapped in it and find the global optimum solution quickly. The rapid and efficient convergence process of ISSA-PNN fully shows its practicality in engineering applications. It is worth noting that the initial fitness value of the ISSA algorithm model is smaller than other algorithm models, which indicates that it is less susceptible to some initial noise and has better stability and anti-interference ability.
These results all reflect that the ISSA-PNN method is superior to other methods with better diagnostic accuracy, robustness, and generalization capability. Therefore, the proposed method has high applicability, reliability, and practicality in the field of oil-immersed transformer fault diagnosis.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}