1. Introduction
Over the course of the previous few decades, medical practitioners have strived to move towards minimally invasive procedures to further protect their patients [
1]. Minimally invasive surgery (MIS) can be defined as a style of surgery in which surgeons use various techniques to cause the least amount of damage to the body without compromising the intended outcome of the procedure [
2]. Due to decreased amount of damage on the body during MIS, patients experience less pain, less scarring, and have shorter hospital stays among other positive outcomes [
2,
3,
4]. In more recent years, robotic MIS has become a more popular option, as human error such as natural tremor can be mitigated [
4,
5,
6]. However, current robotic configurations utilize rigid structures and stiff materials to perform surgery, making it difficult for the devices to navigate through the abnormal crevices of the body [
6]. Other complications include 3D mapping error of the surgical environment, electrical sparking, and burnt pieces of the apparatus being lost inside the patient [
7].
Soft robotics have become increasingly appealing for robotic minimally invasive surgery (RMIS) due to their improved ability to traverse the inside of the human body compared to traditional rigid robotics. In contrast to conventional machines, soft robots are created out of flexible material, giving them the ability to adapt and conform to their external environment [
6,
8,
9]. Through the use of conductive ink, liquid metal, and other aqueous conductors, flexible circuitry can be integrated into these soft robotic systems [
7,
10,
11,
12], creating the ability to manufacture soft pressure, strain, and positional sensors that can be utilized in tandem with other tools during surgery [
13,
14,
15]. However, processing the signals produced from these sensors can be challenging for a variety of reasons. Liquid metal sensors typically exhibit a nonlinear response to mechanical loading and can produce differing results over time due to creep when subjected to cyclic loading [
6,
16,
17]. Hysteresis caused by internal energy dissipation between mechanical loading and unloading can also produce unequal sensor responses when the same load is applied, dependent on the direction of load [
16,
17].
Recently, our research team designed a soft actuator and sensor for cardiac catheter ablation for soft RMIS (
Figure 1). The device is intended to augment normal cardiac catheter ablation with the addition of dynamic force control to treat atrial and ventricular fibrillation [
18]. Utilizing a McKibben muscle to perform a linear motion, the device is intended to apply a consistent known force via the soft sensor and a force control algorithm. This paper will largely focus on the creation and characterization of a soft, resistive strain sensor that can be utilized within catheter device as well as the electrically stimulated ventricles of the heart (
Figure 2). Parekh et al. described a novel fabrication method for liquid metal-filled microchannels with a semicircular cross section via 3D liquid metal printing [
19]. The accuracy and consistency of this simple process leads to high reproducibility when creating liquid metal microchannels. A spiral pattern featured in [
15] was used to maximize the liquid channel length of the sensor, in turn increasing its sensitivity. With this design in mind, our team developed finite element analysis (FEA) simulations to fully characterize a soft microresistive strain sensor with a semicircular cross section. A neo-Hookean analytical model was used to confirm the validity of the results obtained by the FEA simulations. Based on Pouillet’s Law, we expect a linear, proportional correlation between the resistance and force applied. The directionality of force applied and its effect on resistance is also investigated.
Cardiac catheter ablation procedural success rate is heavily dependent on the tool-to-tissue contact force [
20,
21,
22]. While manual controlled catheters may use contact force ranges between 10 and 40 g (0.1–0.4 N) [
23] the recommended target area associated with higher successful rates is a contact force of 10–20 g (0.1–0.2 N) [
21,
22]. Based on these clinical standards, our sensor will be characterized between 0.1 and 0.4 N to cover the full range of accepted contact force values for successful cardiac ablation.
2. Methodology
2.1. Design Overview
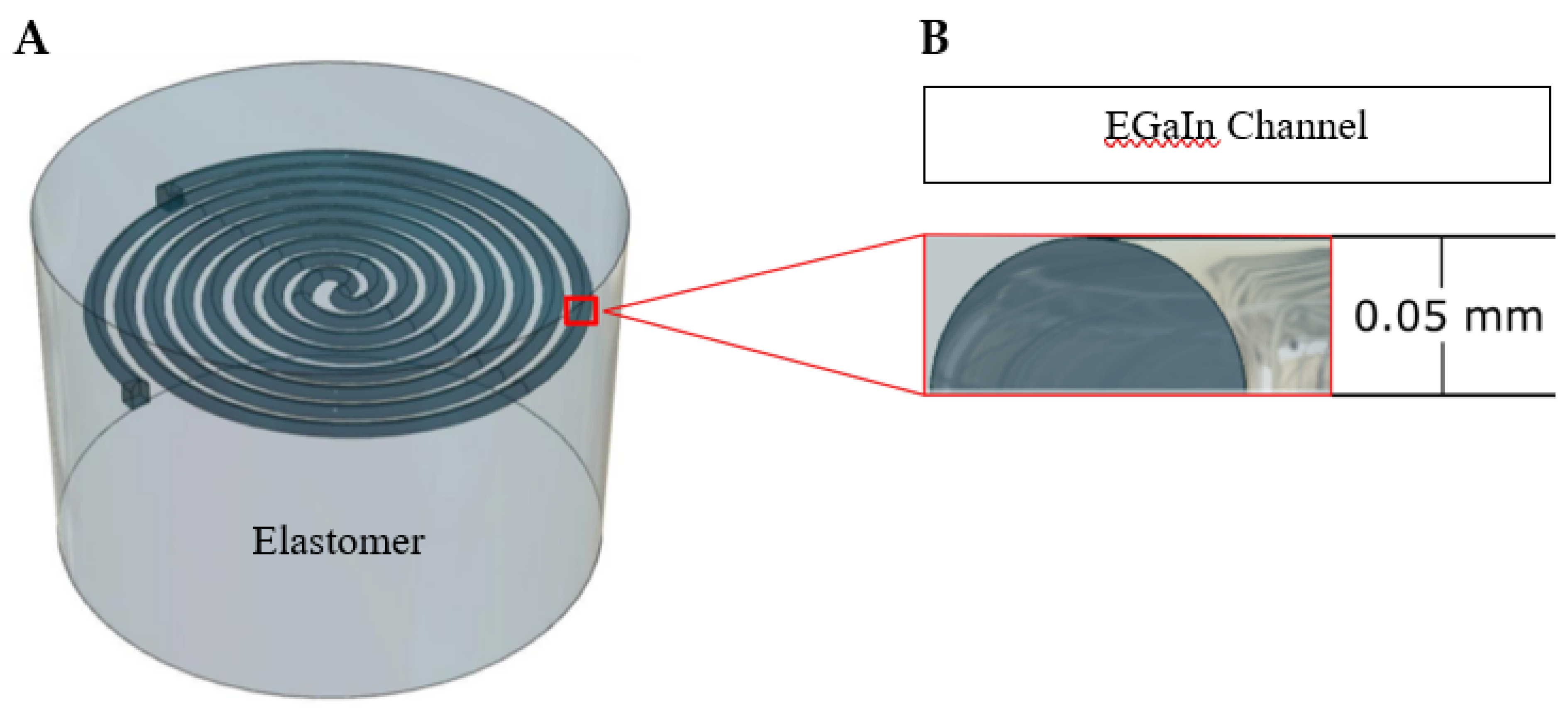
Our sensor consists of a circular elastomeric frame with a radius of 1.5 mm. The total height of the sensor is 2.0 mm with the semicircular channel resting at the 1.5 mm mark, half a millimeter below the surface. A schematic of the design was created in Fusion 360 3D modeling software and can be seen in
Figure 1 and
Figure 2. The channel spans a total of 37.4 mm, shaped in a fashion to maximize its length, as first demonstrated in [
15]. According to Pouillet’s Law, a larger channel length correlates to a finer change-in-resistance resolution when the channel is deformed. The radius of the semicircular channel is 50 microns. Ecoflex-0030 is typically used as the soft silicone matrix material due to its low durometer and elastic modulus. The liquid metal eutectic gallium indium (EGaIn) is used for its high electrical conductivity, low viscosity, and structural integrity that arises from its passivating oxide layer [
12,
19]. Both materials will be modeled in our computational analysis.
While this article focuses on the computational characterization of the sensor, it is based off of an already proven fabrication method [
19]. To fabricate this model, EGaIn can be printed in the shape of the channel onto a cured elastomer substrate. Uncured elastomer of the same chemical composition as the base can be poured on the liquid metal without deformation of the channel shape due to the aforementioned passivating oxide layer. This oxide layer is also the reason the 3D liquid metal reservoirs can be created, as the structural integrity gained by the oxide layer allows for 3D pillars of EGaIn to be extruded. Wires can be inserted into the reservoirs prior to when the top layer has fully cured, or before the final layer is poured. Once the final layer of elastomer is cured, the shell of the sensor can be removed from the excess elastomer.
2.2. Finite Element Simulation
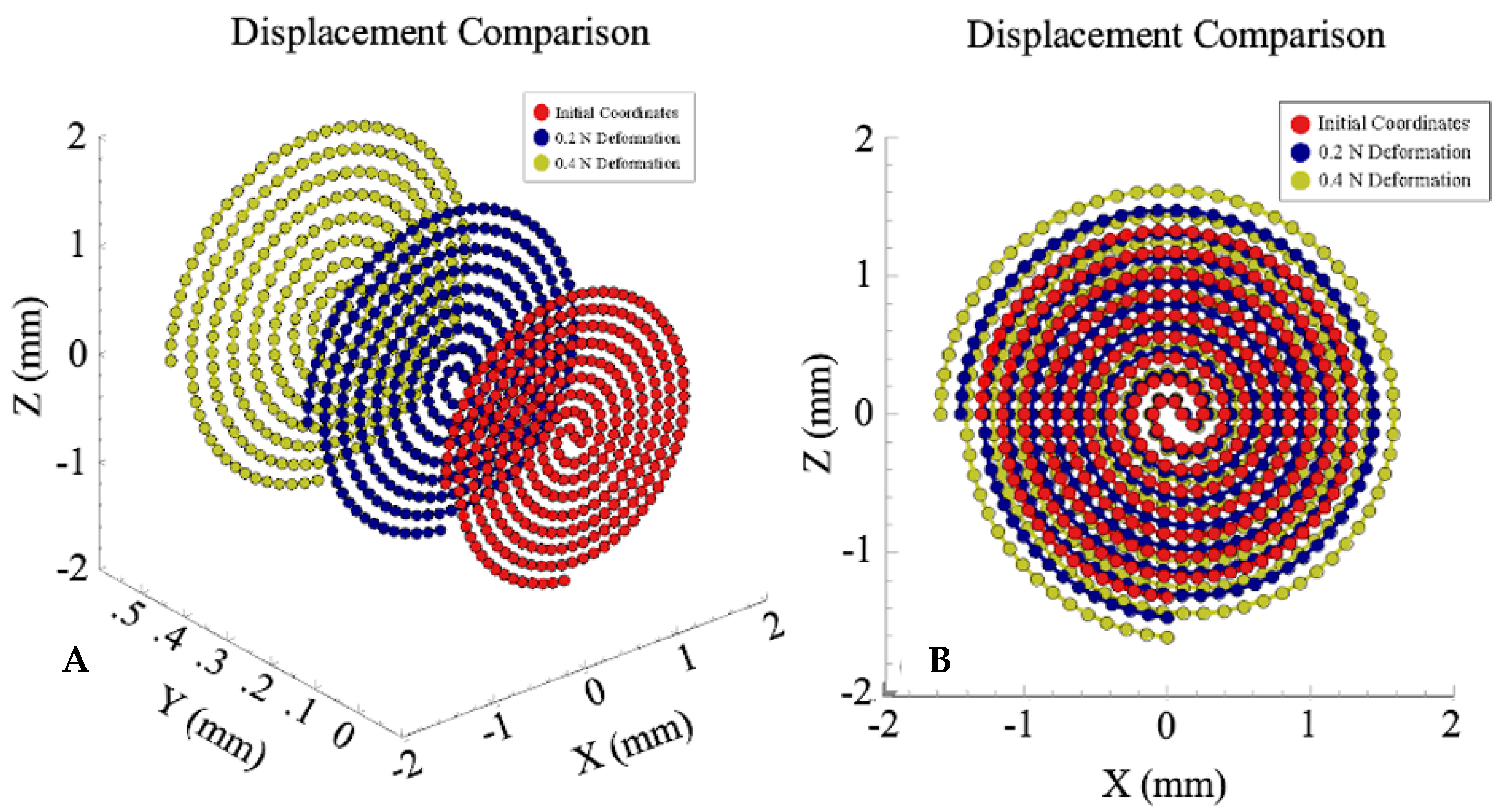
To determine the change in resistance through finite element analysis, we simulated a parametric sweep of force (0 N–0.4 N, with a step size of 0.1 N) applied uniformly across the entire surface of the sensor. An increase in force across the sensor will increase the deformation of the soft elastomer, and in turn, deform the microchannel. Assuming that EGaIn and the elastomer are incompressible, it can be assumed that the liquid metal channel will retain a constant volume, despite deformation via pressure. By comparing the initial and post deformation length of the channel, the cross-sectional area of the channel at each mesh point can be determined using the constant volume assumption.
The Cartesian coordinates for the initial and post deformation mesh points along the channel were recorded. The three-dimensional distance formula in Equation (1) was used to calculate the length of each line segment along the channel pre and post deformation.
Here,
d is the distance between two points, and
xi,
yi,
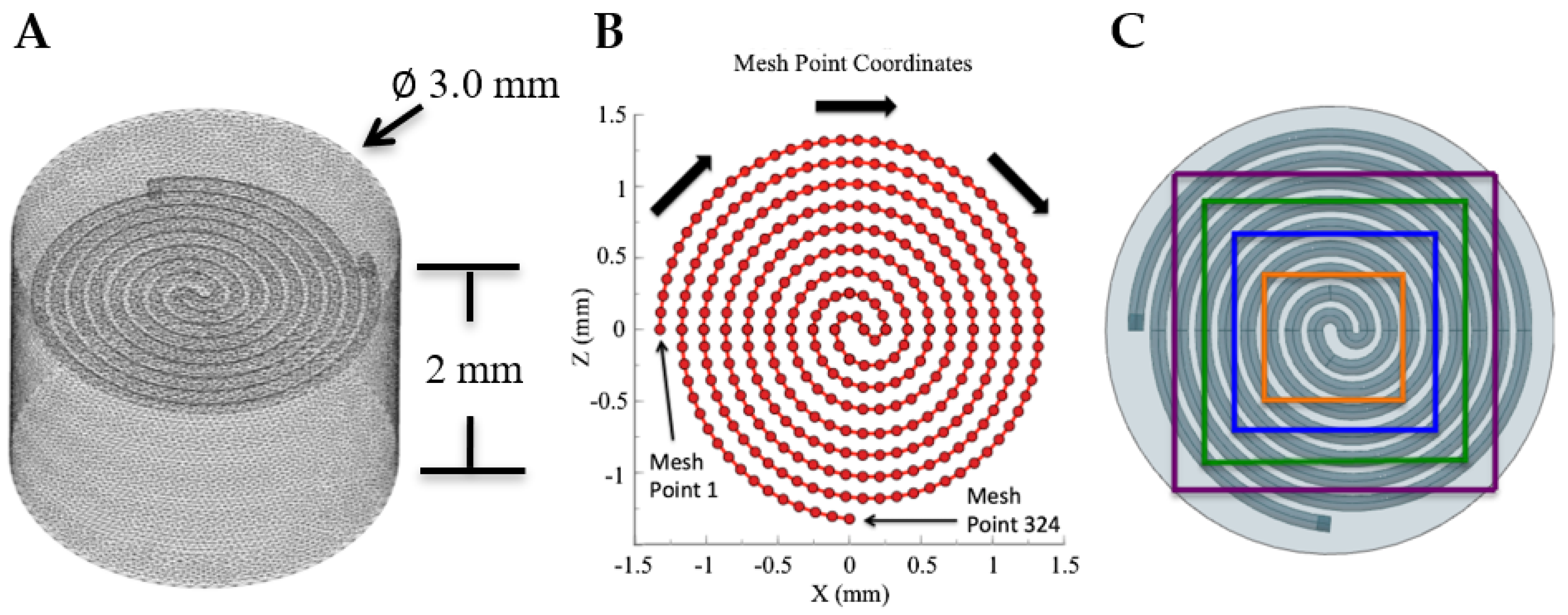
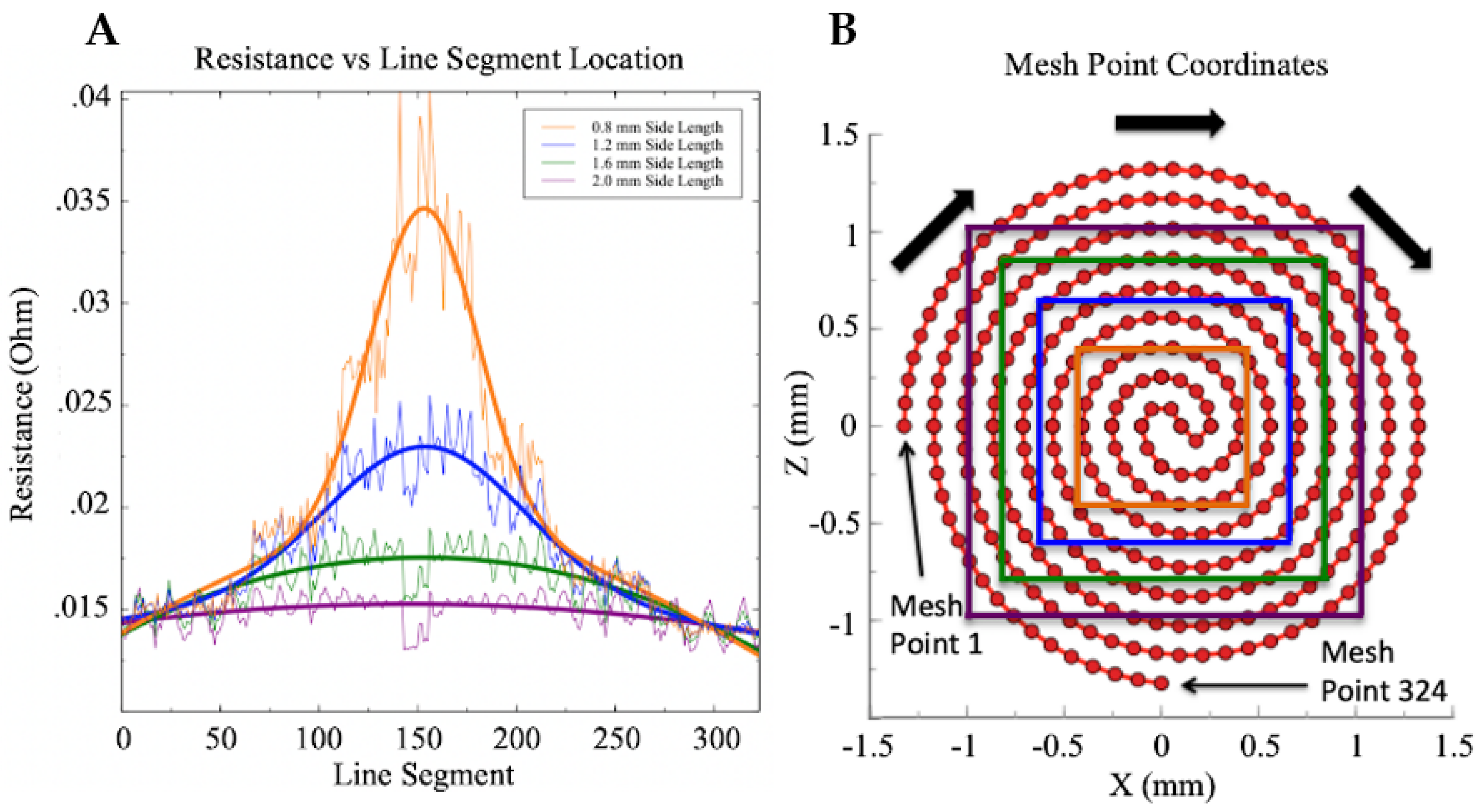
zi are the Cartesian coordinates where the index i corresponds to the points 1 and 2. Point 1 and point 2 refer to the same point pre and post deformation, respectively. N = 324 equidistant points are used to make up 323 line segments along the 37.4 mm channel. The sum of the initial line segments was cross-referenced with the 3D model to confirm an accurate mesh representation. There was a 99.7% agreement in length between the mesh representation and 3D CAD model. The resistance of each line segment can be calculated using Pouillet’s Law seen in Equation (2):
where
R represents the resistance of the line segment,
is the initial resistivity of a uniform material (EGaIn),
L is the length of the channel segment, and
A represents the cross-sectional area of the segment. The sum of the resistances across all line segments is equivalent to the total resistance across the sensor. The change in resistance as a function of force was found using the initial resistance of the 37.4 mm channel and using this method to find the total resistances of each force applied in the sweep.
A virtual mesh was created using the application Gmsh. A triangle mesh was used with the maximum mesh size being 0.05 mm.
Figure 3 depicts the 3D mesh configuration of the sensor. Matlab’s FEAtool application was used to run linear elastic deformation simulations on the mesh imported from Gmsh. Linear elastic deformation has been used to model elastomeric materials with small amounts of strains in the past [
15]. The Poisson’s ratio of the material was set to 0.499, while the density and elastic modulus of the material were set to 1070 kg/m
3 and 125 KPA, respectively, based on the innate properties of EcoFlex 0030.
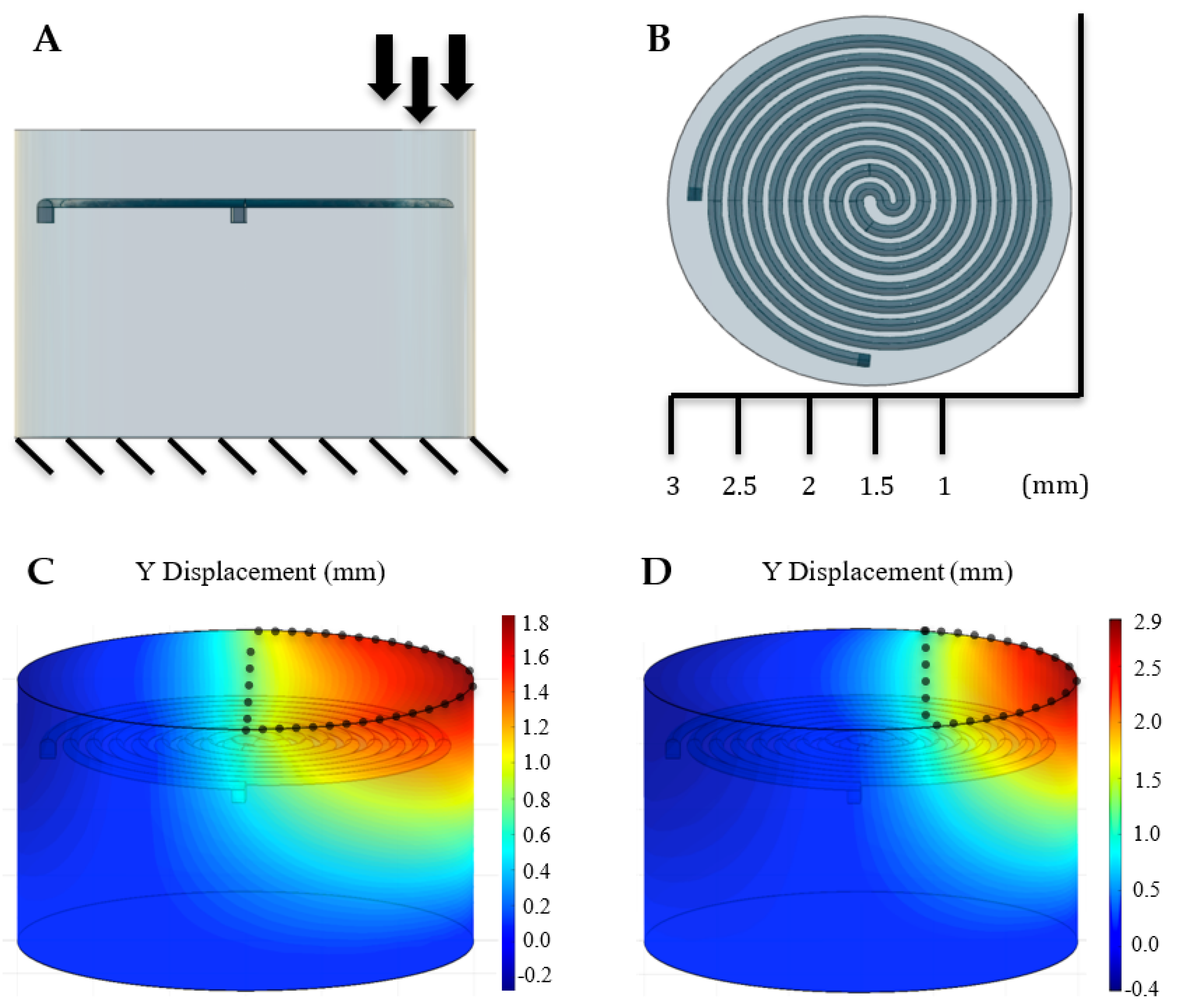
2.3. Pressure Directionality
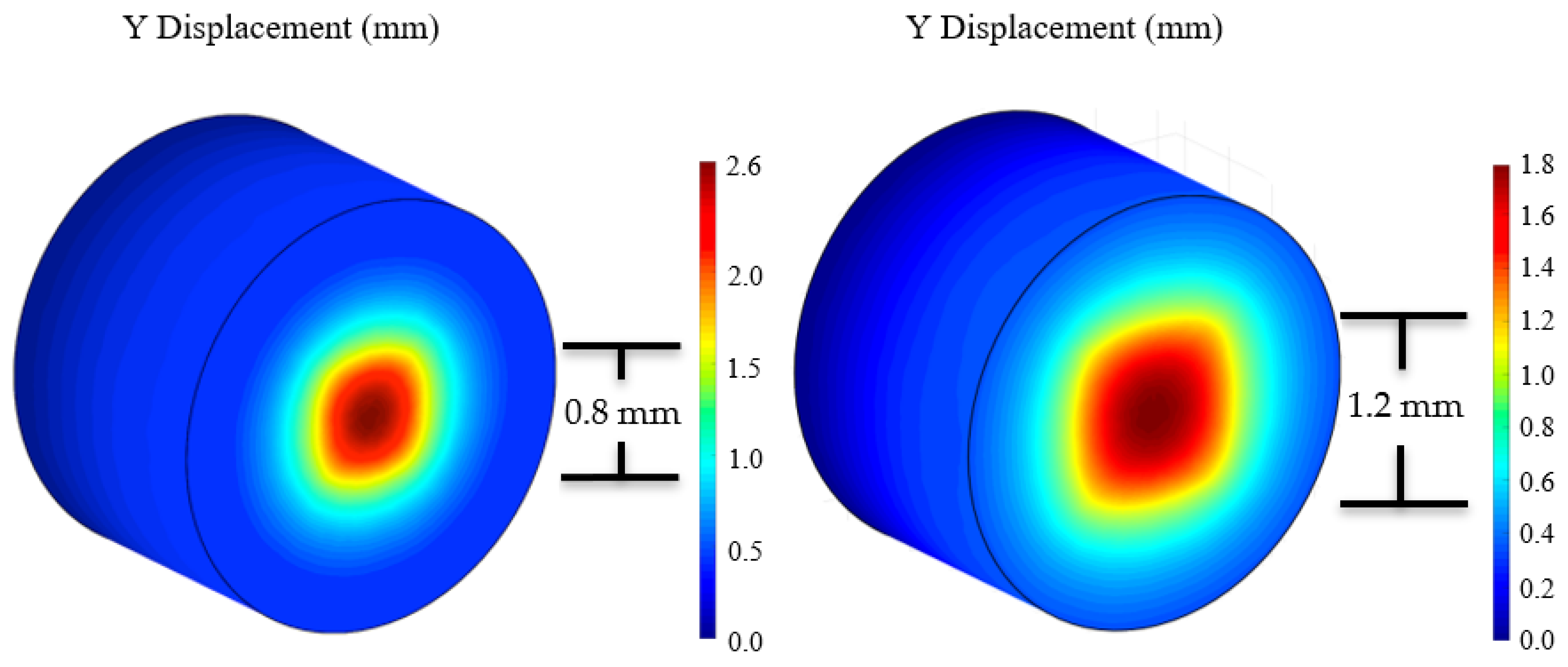
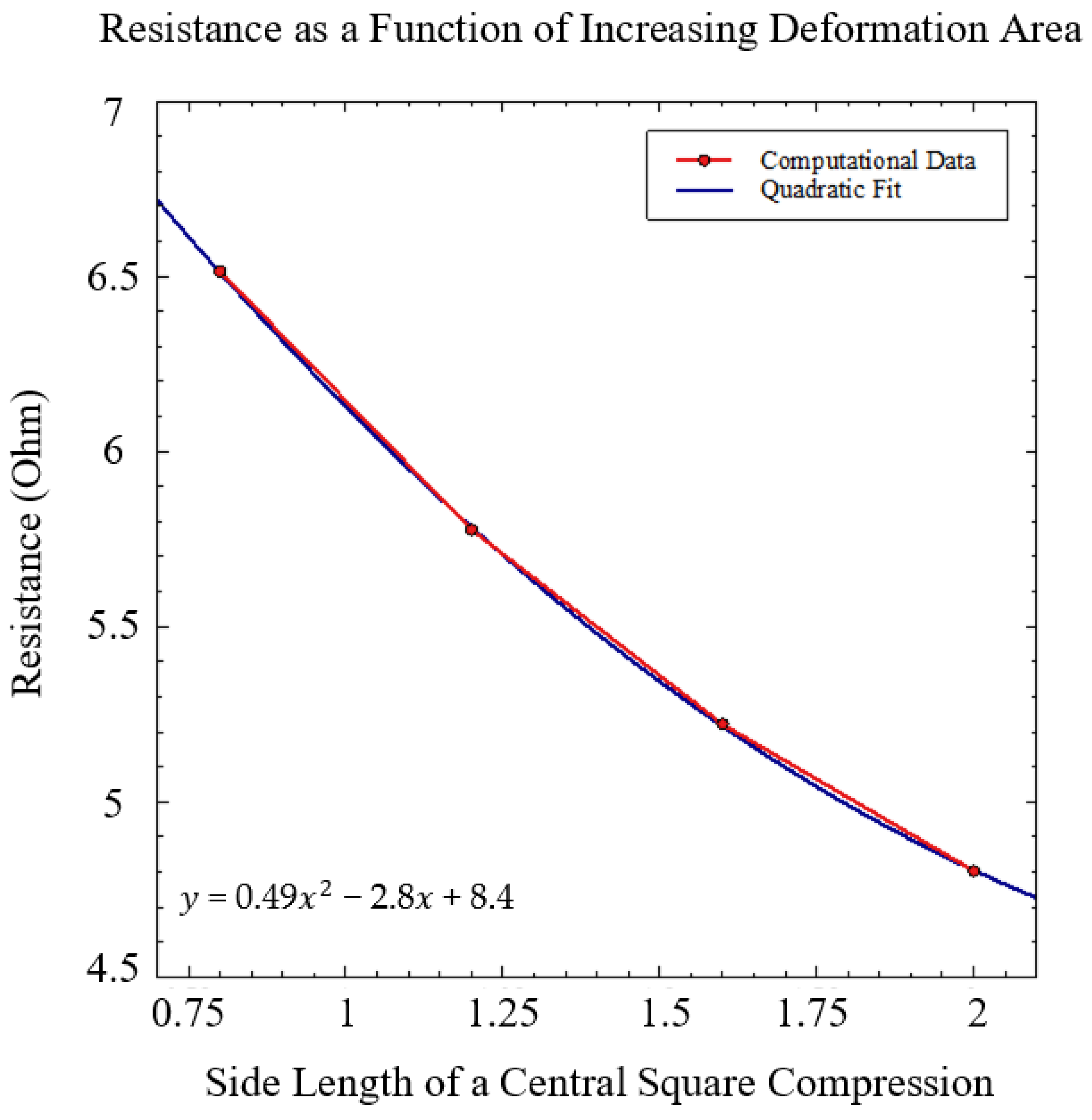
The resistance as a function of surface area deformation was also investigated. A constant 0.4 Newton force was applied centrally as a parametric sweep of the surface area under deformation was conducted. The sweep began with the deformation of a 0.8 by 0.8 mm square surface area and ended with a 2 by 2 mm square surface area. The same procedure previously mentioned was used to compute the total resistance of each simulation.
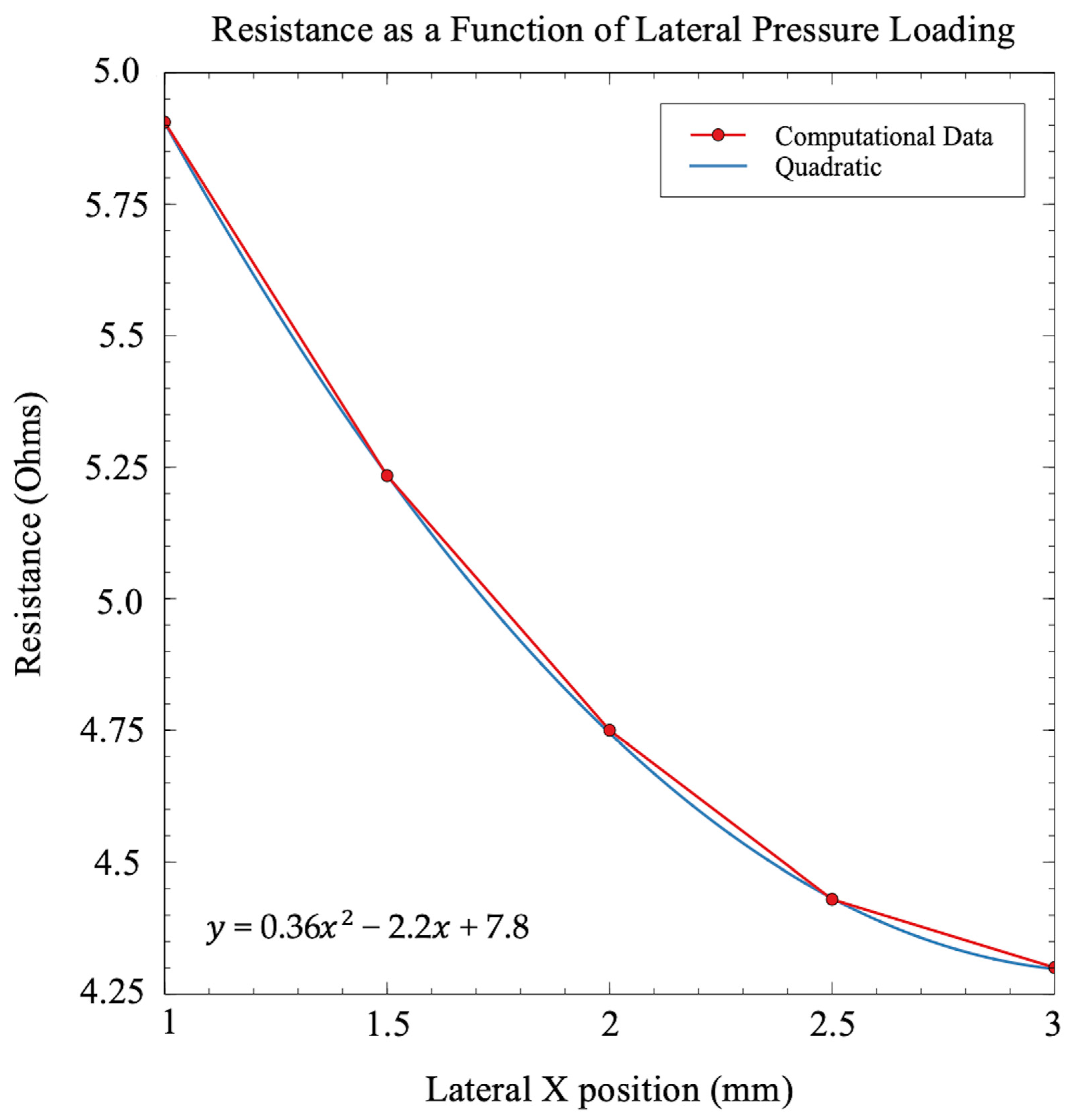
Finally, the resistance as a function of lateral loading pressure was examined. Starting with the full surface area of the sensor, the surface area was decreased laterally along the x-axis while keeping a constant 0.4 force applied. The results of these pressure sweeps allow the ability to predict the resistance output under various partial loads and provide insight on the importance of accounting for directionality in soft sensing.
2.4. Analytical Model—Neo-Hookean Material
The neo-Hookean model is a simple method to model hyperelastic materials, similar to that of Hooke’s Law [
24]. It is often used to describe the nonlinear stress–strain curves of both compressible and incompressible materials. Rubber has been considered an incompressible material in modeling due to its bulk modulus being many magnitudes higher than its shear and Young’s moduli [
24,
25,
26]. The principal stretch ratios of an incompressible neo-Hookean material can be described in Equation (3) below:
The principal stretch ratios of a rectangular channel will be used to describe our model and are as follows:
As previously mentioned, Pouillet’s Law can be used to determine the resistivity of a certain material based on its cross-sectional area. The resistance of the channel in our analytical model will be described as:
For an incompressible neo-Hookean material under uniaxial tension or compression, the following relationships can be derived:
Solving the system of equations in terms of
, the resistance of the channel can be expressed using the following equation:
Dividing the resistance by its initial value, a relationship between the length of the channel and the resistance can be derived.
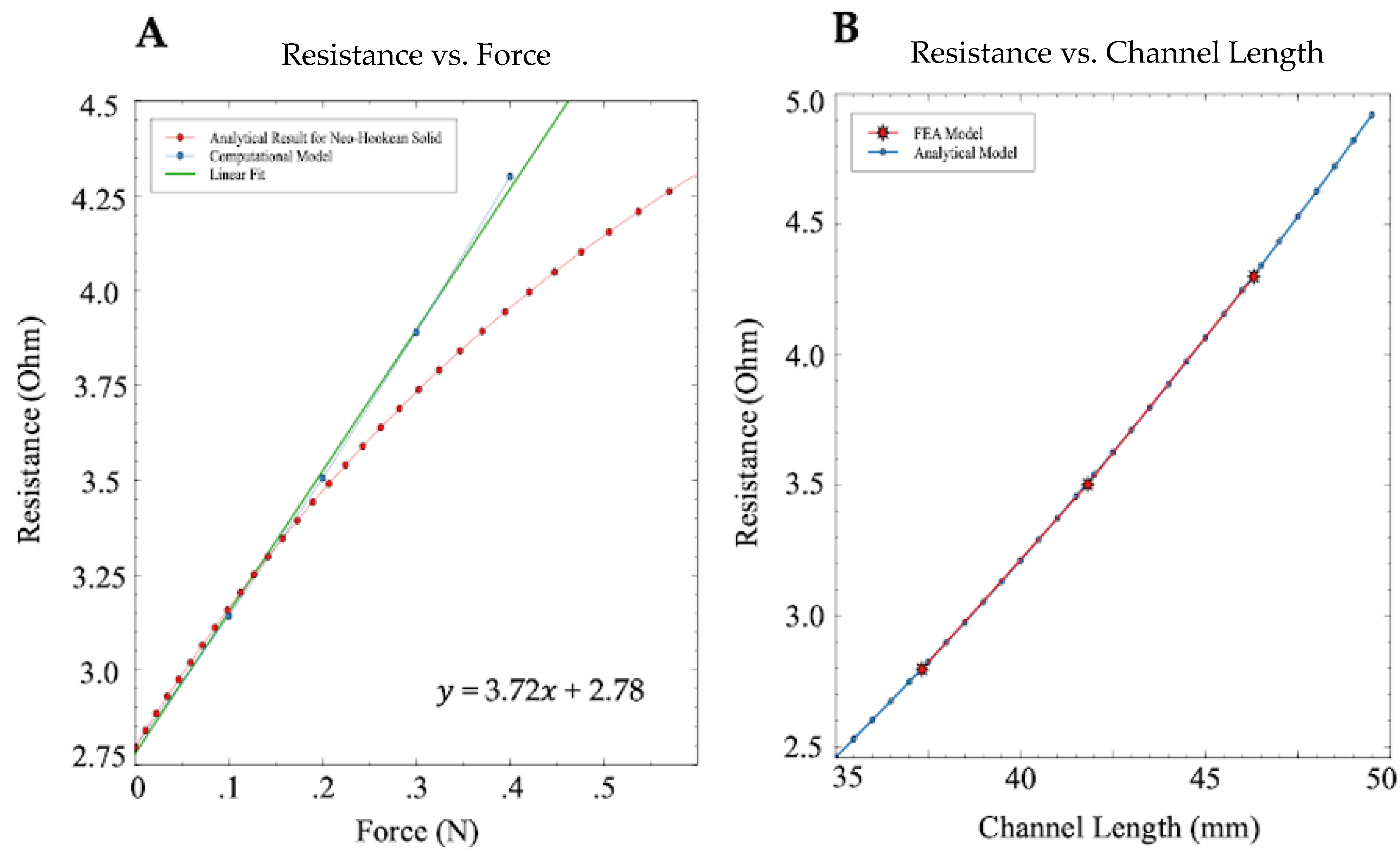
This relationship will be used to confirm the validity of the process used to perform the FEA simulations and the corresponding computational results. Once the initial resistance of the static sensor is found, it can be multiplied across an array of length values to determine the final resistances at each length. These final resistance values will be cross-examined with the FEA simulations to determine the degree of agreement between the two models. With good agreement, we will have confidence in further exploring the different modes of deformation as described in
Section 2.3.
The force applied to a neo-Hookean material under unilateral compression can be described using the following equation:
Here, E is that elastic modulus of the material and A0 is the initial surface area in which the force is applied. Using this equation, we can find an analytical relationship between the force and change in lateral length of the sensor. In turn, using the Poisson’s ratio of the material, we can approximate the change in length of the channel with respect to force. Finally, the relationship in Equation (8) can be applied to find an analytical relationship between force applied and resistance of the sensor. This relationship will be compared to the FEA model to further determine the goodness of fit between the two models.
4. Discussion and Conclusions
Using FEA, we examined various modes of force loading of a soft resistive elastomeric sensor. The proposed geometry of the sensor and semicircular channel was based off the novel fabrication technique created by Parekh et al. [
19] and the spiral design featured in [
15]. Our sensor was modeled as an incompressible material and used the inherent properties of EGaIn and EcoFlex 0030 to model our conductive liquid and elastomer respectively. To examine the validity of our FEA simulations, a neo-Hookean analytical model (widely used for elastomeric materials) was implemented under the same conditions and compared to the computational predictions.
Using our FEA model, a linear correlation between resistance and force applied was found when the surface area under load remained constant. This result was expected due to Pouillet’s Law depicting a linear relationship between the length of the channel and resistance when the change in cross-sectional area is negligible. With the cross-sectional area already magnitudes smaller than our channel length, we expected the length to dominate the resistance when a constant volume assumption is made.
A neo-Hookean analytical model was used to compare the change in resistance of the sensor under force with the results from our FEA model. The conversion of resistance to channel length was identical, which was expected as both methods use a constant volume assumption to convert between the two values. When comparing resistance to force applied, the models displayed high agreement up to 0.2 N, which is the recommended force used for cardiac catheter ablation as previously mentioned. After 0.2 N, deviations between the two models start to occur that will need to be compensated for in further studies. However, the overall reasonable agreement gives us confidence that we have an understanding of the sensor’s underlying mechanics.
After initial model validation, different methods of loading were examined computationally. These loading methods were created to mimic the different angles of tissue contact the ablation tip may encounter during the procedure, and account for the different styles of ablation tip impacting the sensor. Similar quadratic relationships between resistance and load were found dependent on the type and placement of the load. The quadratic nature of these trends can be explained by the increased localized pressure needed to maintain a constant 0.4 N force applied.
The next step is to fabricate our proposed design and conduct experimental trials on the sensor. The experimental resistance would be determined under the same conditions illustrated in this article to determine the agreement between the experimental data and our proposed models. Finding an accurate model for a 3D-printed sensor will allow for better fabrication repeatability of the microsensor with the ultimate goal of using the sensor for cardiac catheter ablation. Once successful, design modifications will have to be implemented to integrate the soft actuator and sensor into a function RF ablation catheter tip.
In cardiac catheter ablation, the catheter is hard to control due to the remote, ex vivo control by the surgeon. Along with the constant beating and abnormal surface geometry of the heart, it is difficult to create an exactly uniaxial contact with the heart wall. Therefore, it is crucial to be able to sense the force applied to the heart walls at an angled approach. We found a relationship between the resistance and lateral loading conditions that could be used to model angled ablation. Future research will be needed to create an experimental relationship between angle of contact and the lateral x position that we defined so that a relationship between resistance and angle of contact at a constant force can be created.
While similar designs have been created and experimentally shown to induce a change in resistance under deformation [
14,
15,
27,
28], here we focused on a computational study to characterize resistance vs. force relationships for liquid metal sensors under various loading conditions. Park and Majidi et al. displayed a strong relationship between theoretical and experimental results for both centered and off centered forces applied to soft liquid metal sensors but did not include a complete computational study. Gao et al. briefly displayed an experimental change in resistance vs. force relationship that displayed around a 0.4 ohm/0.1 N at small forces, comparable to our computational 0.37 ohm/0.1 N [
28]. However, the forces described in Gao et al. were purely tensile, differing from the compressive forces investigated in this work. While the simulations we ran were based on our personal research goals, we hope that these preliminary results can shed light on what to expect for others in this line of work, regardless of application.


 and
and 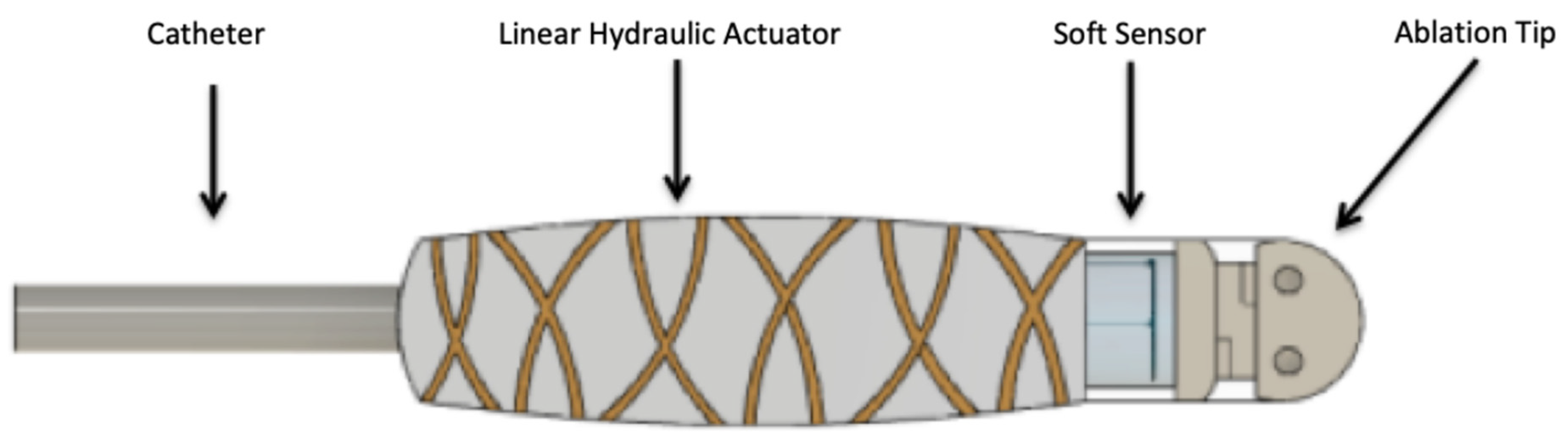{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









