
A Tri-Satellite Interference Source Localization Method for Eliminating Mirrored Location

 ,
, 
Abstract
:1. Introduction
2. TDOA/FDOA Measure Model
3. Multi-Moment TDOA Localization Model
4. Improved Tri-Satellite Localization Method
- Step 1
- Calculate the distance difference between the corresponding three satellites and the interference source and according to the TDOA at moments;
- Step 2
- Initialization, set the number of iterations , and the initial position of the interference source ;
- Step 3
- Calculate the Hessian matrix in the process of this iteration, and obtain the estimation result of the interference source position in the next iteration according to formula (16);
- Step 4
- Define the position error of the two iterations as the cost function in the iteration process. If it is less than a certain minimum threshold, stop the iteration and output the positioning result; otherwise, let , and return to step 3 to continue the iteration.
- Step 5
- Precise localization moment by moment. The output location result is used as the initial value, and the single moment iteration method is used to obtain the precise value of the positioning result for the measurement result at each moment.
5. Results
5.1. Experiment on the Influence Factors of the Multi-Moment Localization
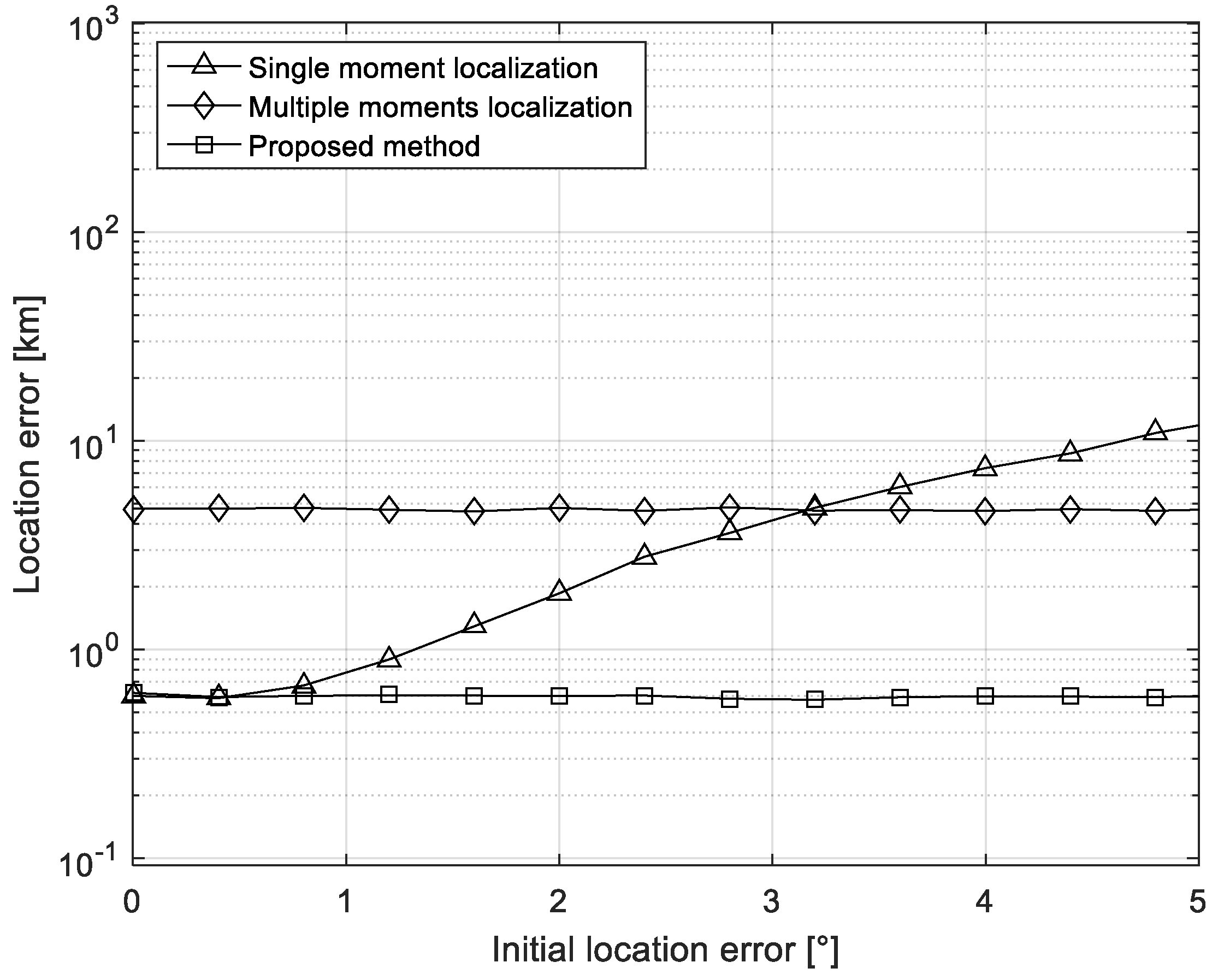
5.2. Experiment on the Influence of Iterative Initial Location
5.3. Experiment on the TDOA Measure Error
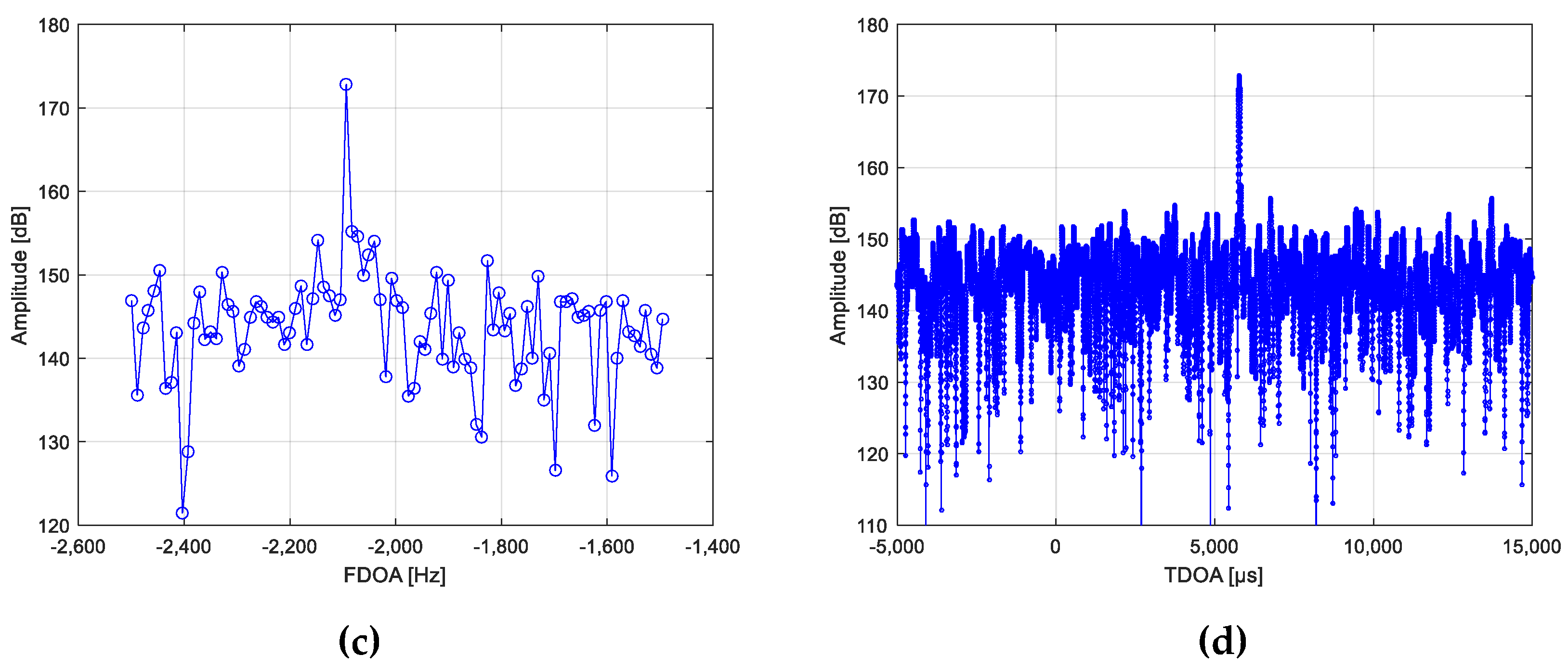
5.4. Real Data Result Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dempster, A.G.; Cetin, E. Interference Localization for Satellite Navigation Systems. Proc. IEEE 2016, 104, 1318–1326. [Google Scholar] [CrossRef]
- Ho, K.C.; Lu, X.; Kovavisaruch, L. Source Localization Using TDOA and FDOA Measurements in the Presence of Receiver Location Errors: Analysis and Solution. IEEE Trans. Signal Process. 2007, 55, 684–696. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Cola, T.D.; Wang, J.B.; Cheng, J. Supporting IoT With Rate-Splitting Multiple Access in Satellite and Aerial Integrated Networks. IEEE Internet Things J. 2021. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Champagne, B.; Zhu, W.P.; Al-Dhahir, N. Secure Beamforming for Cognitive Satellite Terrestrial Networks With Unknown Eavesdroppers. IEEE Syst. J. 2020, 15, 1–4. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Champagne, B.; Zhu, W.P.; Al-Dhahir, N. Secure and Energy Efficient Transmission for RSMA-Based Cognitive Satellite-Terrestrial Networks. IEEE Wirel. Commun. Lett. 2020, 10, 251–255. [Google Scholar] [CrossRef]
- Haworth, D.P.; Smith, N.G.; Bardelli, R.; Clement, T. Interference localization for EUTELSAT satellites-the first european transmitter location system. Int. J. Satell. Commun. 2015, 15, 155–183. [Google Scholar] [CrossRef]
- José, F.; Guillermo, R.; Juan, M.T.; Brian, S. Survey on the Performance of Source Localization Algorithms. Sensors 2017, 17, 2666. [Google Scholar]
- Yu, H.; Huang, G.; Gao, J.; Liu, B. An Efficient Constrained Weighted Least Squares Algorithm for Moving Source Location Using TDOA and FDOA Measurements. IEEE Trans. Wirel. Commun. 2012, 11, 44–47. [Google Scholar] [CrossRef]
- Yang, K.; An, J.; Bu, X.; Sun, G. Constrained Total Least-Squares Location Algorithm Using Time-Difference-of-Arrival Measurements. IEEE Trans. Veh. Technol. 2010, 59, 1558–1562. [Google Scholar] [CrossRef]
- Wu, P.; Su, S.; Zuo, Z.; Guo, X.; Wen, X. Time Difference of Arrival (TDoA) Localization Combining Weighted Least Squares and Firefly Algorithm. Sensors 2019, 19, 2554. [Google Scholar] [CrossRef] [Green Version]
- Ming, S.; Le, Y.; Ho, D. Efficient Joint Source and Sensor Localization in Closed-Form. IEEE Signal Process. Lett. 2012, 19, 399–402. [Google Scholar]
- Lei, W.; Chen, B. High-precision hyperboloid location method using passive time-difference-of-arrival measurements. IET Radar Sonar Navig. 2013, 7, 710–717. [Google Scholar] [CrossRef]
- Huang, J.; Xue, Y.; Le, Y. An efficient closed-form solution for joint synchronization and localization using TOA. Future Gener. Comput. Syst. 2013, 29, 776–781. [Google Scholar] [CrossRef]
- Ho, K. Bias reduction for an explicit solution of source localization using TDOA. IEEE Trans. Signal Process. 2012, 60, 2101–2114. [Google Scholar] [CrossRef]
- You, K.H.; Lee, K.; Lee, H. An Optimized Solution for Hybrid TDOA/AOA based Geolocation using Nelder-Mead Simplex Method. IET Radar Sonar Navig. 2019, 13, 992–997. [Google Scholar]
- Sidorenko, J.; Schatz, V.; Bulatov, D.; Scherer-Negenborn, N.; Hugentobler, U. Self-Calibration for the Time Difference of Arrival Positioning. Sensors 2020, 20, 2079. [Google Scholar] [CrossRef] [Green Version]
- Qu, X.; Xie, L. An efficient convex constrained weighted least squares source localization algorithm based on TDOA measurements. Signal Process. 2016, 119, 142–152. [Google Scholar] [CrossRef]
- Lee, K.; Kim, S.; You, K. Iterative Regression Based Hybrid Localization for Wireless Sensor Networks. Sensors 2021, 21, 257. [Google Scholar] [CrossRef]
- Simonetto, A.; Leus, G. Distributed maximum likelihood sensor network localization. IEEE Trans. Signal Process. 2014, 62, 1424–1437. [Google Scholar] [CrossRef] [Green Version]
- Shen, H.; Ding, Z.; Dasgupta, S.; Zhao, C. Multiple source localization in wireless sensor networks based on time of arrival measurement. IEEE Trans. Signal Process. 2014, 62, 1938–1949. [Google Scholar] [CrossRef]
- Robles, G.; Fresno, J.; Martínez-Tarifa, J. Separation of Radio-Frequency Sources and Localization of Partial Discharges in Noisy Environments. Sensors 2015, 15, 9882. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Q.; Chen, B.; Yang, M. Time Difference of Arrival Passive Localization Sensor Selection Method Based on Tabu Search. Sensors 2020, 20, 6547. [Google Scholar] [CrossRef] [PubMed]
- Cui, H.; Shu, M.; Song, M.; Wang, Y. Parameter Selection and Performance Comparison of Particle Swarm Optimization in Sensor Networks Localization. Sensors 2017, 17, 487. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Masmoudi, A.; Bellili, F.; Affes, S.; Stephenne, A. A Non-Data-Aided Maximum Likelihood Time Delay Estimator Using Importance Sampling. IEEE Trans. Signal Process. 2011, 59, 4505–4515. [Google Scholar] [CrossRef]
- Lee, B.; Kalker, T.; Schafer, R.W. Correlogram template matching for time-delay estimation. In Proceedings of the Acoustics, Speech and Signal Processing (ICASSP), 2011 IEEE International Conference, Prague, Czech Republic, 22–27 May 2011. [Google Scholar]
- Mikhalev, A.; Ormondroyd, R.F. Comparison of Hough Transform and Particle Filter Methods of Emitter Geolocation using Fusion of TDOA Data. In Proceedings of the Workshop on Positioning, Navigation and Communication, Dresden, Germany, 7–8 April 2011. [Google Scholar]
- Ho, K.C.; Xu, W. An accurate algebraic solution for moving source location using TDOA and FDOA measurements. IEEE Trans. Signal Process. 2004, 52, 2453–2463. [Google Scholar] [CrossRef]
- NIMA. Department of Defense World Geodetic System 1984, Its Definition and Relationships with Local Geodetic Systems; National Imagery and Mapping Agency: Bethesda, MD, USA, 1997. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Localization Method | Location Time | Location Result | Location Error |
|---|---|---|---|
| Multiple moment method | 20 December 2020 14:29:54 | 108.7986° E 32.4250° N | 11.66 km |
| 20 December 2020 15:29:54 | 108.7949° E 32.3725° N | 5.84 km | |
| 20 December 2020 16:29:54 | 108.8000° E 31.9776° N | 37.93 km | |
| 20 December 2020 17:29:54 | 108.8281° E 31.7897° N | 58.86 km | |
| Proposed method | 20 December 2020 14:29:54 | 108.7899° E 32.2679° N | 5.80 km |
| 20 December 2020 15:29:54 | 108.7937° E 32.3174° N | 0.48 km | |
| 20 December 2020 16:29:54 | 108.7938° E 32.2880° N | 3.57 km | |
| 20 December 2020 17:29:54 | 108.7938° E 32.3015° N | 2.08 km |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huo, L.; Bai, R.; Jiang, M.; Chen, B.; Chen, J.; Huang, P.; Liao, G. A Tri-Satellite Interference Source Localization Method for Eliminating Mirrored Location. Sensors 2021, 21, 4483. https://doi.org/10.3390/s21134483
Huo L, Bai R, Jiang M, Chen B, Chen J, Huang P, Liao G. A Tri-Satellite Interference Source Localization Method for Eliminating Mirrored Location. Sensors. 2021; 21(13):4483. https://doi.org/10.3390/s21134483
Chicago/Turabian StyleHuo, Lihuan, Rulong Bai, Man Jiang, Bing Chen, Jianfeng Chen, Penghui Huang, and Guisheng Liao. 2021. "A Tri-Satellite Interference Source Localization Method for Eliminating Mirrored Location" Sensors 21, no. 13: 4483. https://doi.org/10.3390/s21134483
APA StyleHuo, L., Bai, R., Jiang, M., Chen, B., Chen, J., Huang, P., & Liao, G. (2021). A Tri-Satellite Interference Source Localization Method for Eliminating Mirrored Location. Sensors, 21(13), 4483. https://doi.org/10.3390/s21134483