
A Comparison of Three Neural Network Approaches for Estimating Joint Angles and Moments from Inertial Measurement Units

 , , ,
, , ,  ,
, 
Abstract
:1. Introduction
- Multilayer perceptron (MLP) networks are the simplest and classical class of ANNs. They are flexible and are used to learn relationships between inputs and outputs for classification or regression tasks. By flattening image or time series data, MLP networks can be used to process time-sequence input data. They are easy to train but are limited to time-normalised data and are computationally expensive. They provide baseline information for the predictability of all types of data. IMU sensor data has been used as input into this type of ANN for the prediction of joint angles and joint moments [12,13,14,17].
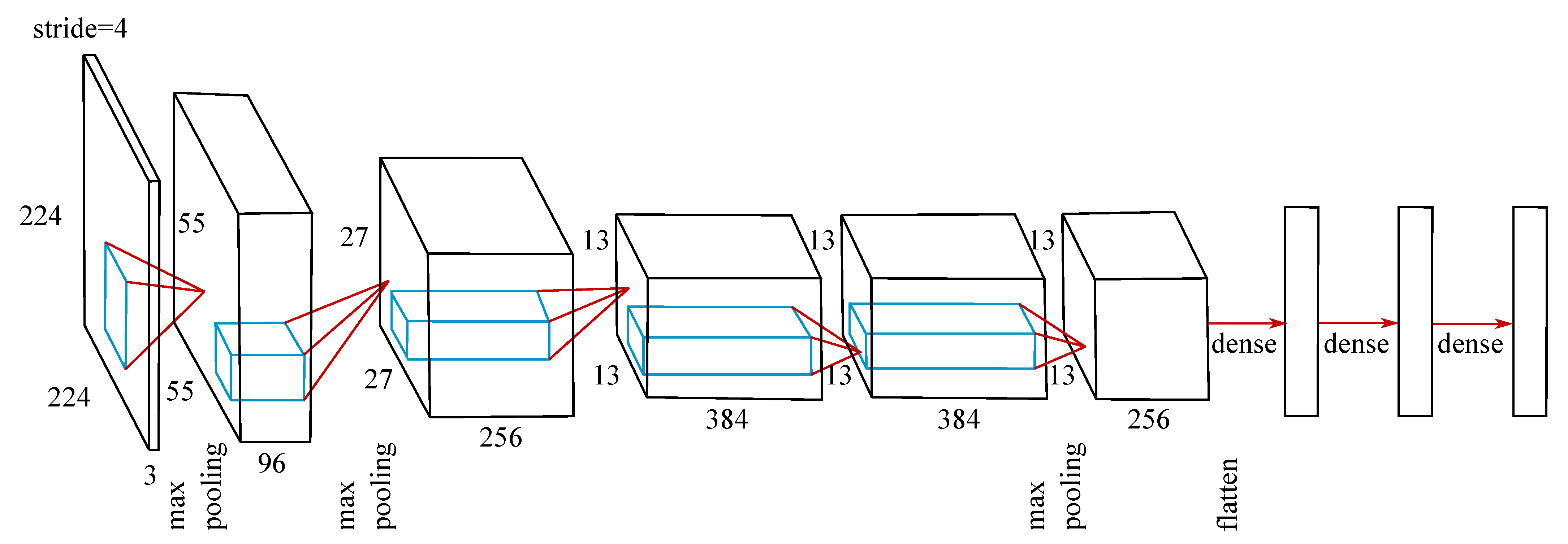
- Convolutional Neural Networks (CNNs) were originally designed to map image data to a single output variable, a classification task. They learn from raw image data by exploiting correlations between local pixels. They work especially well on data with a spatial relationship, and due to the fact an ordered relationship can also be found in time series data, this makes CNNs suitable for time series prediction of human motion. CNNs have been used with inertial sensor data inputs to predict joint kinematics and kinetics [11,15]. Different open-access models have been trained on large datasets for image classification previously, enabling the use of transfer learning or fine tuning of a model instead of training a CNN from scratch. To be able to use models trained on large image databases and apply transfer learning rather than training from scratch, Johnson et al. [18,19] transformed motion time sequences to images for the prediction of three dimensional knee joint moments and ground reaction force sequences based on motion capture data inputs.
- Recurrent Neural Networks, such as Long Short-Term Memory (LSTM) networks, were designed for sequence prediction problems. They make use of time dependencies in data which explains their success in natural language processing. Hence, they are also convenient for tasks involving the prediction of motion sequences. Unfortunately, LSTM networks are intensive to train and require large datasets, something rarely available in biomechanics [2]. Using inertial sensor data as inputs, LSTM networks have also been previously used to predict joint angles and moments [15,17,20].
2. Materials and Methods
2.1. Dataset
2.2. Data Processing
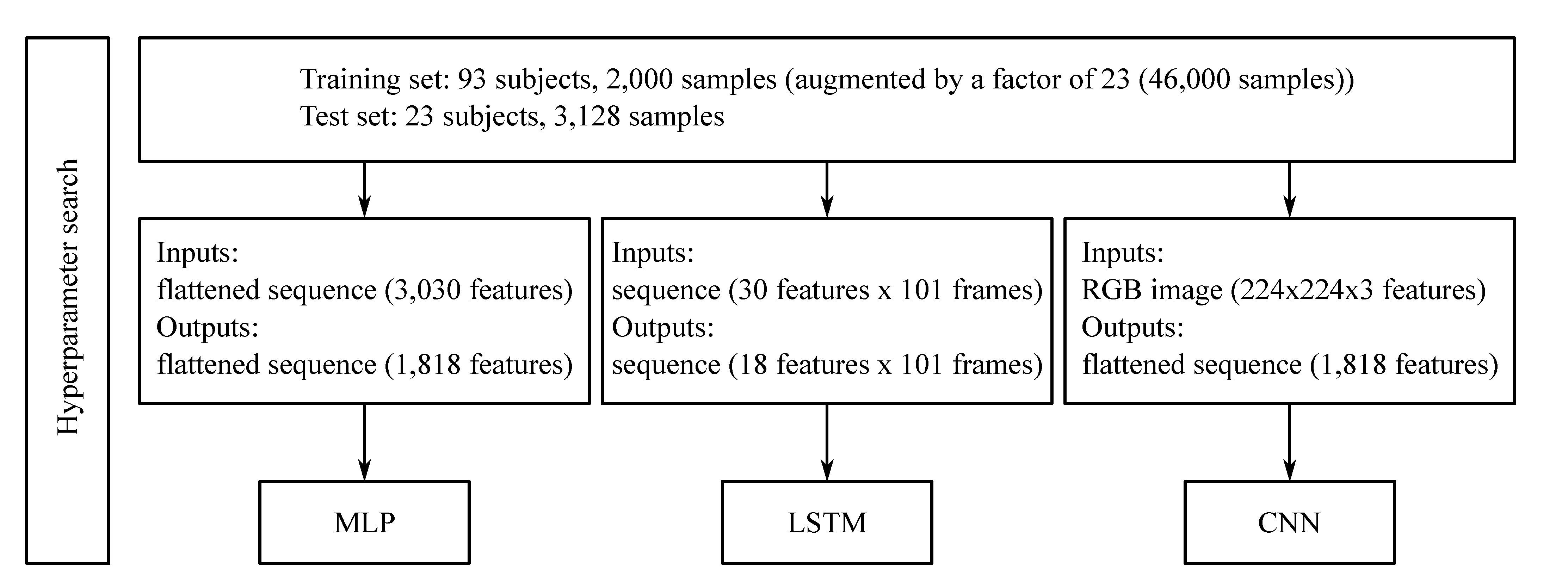
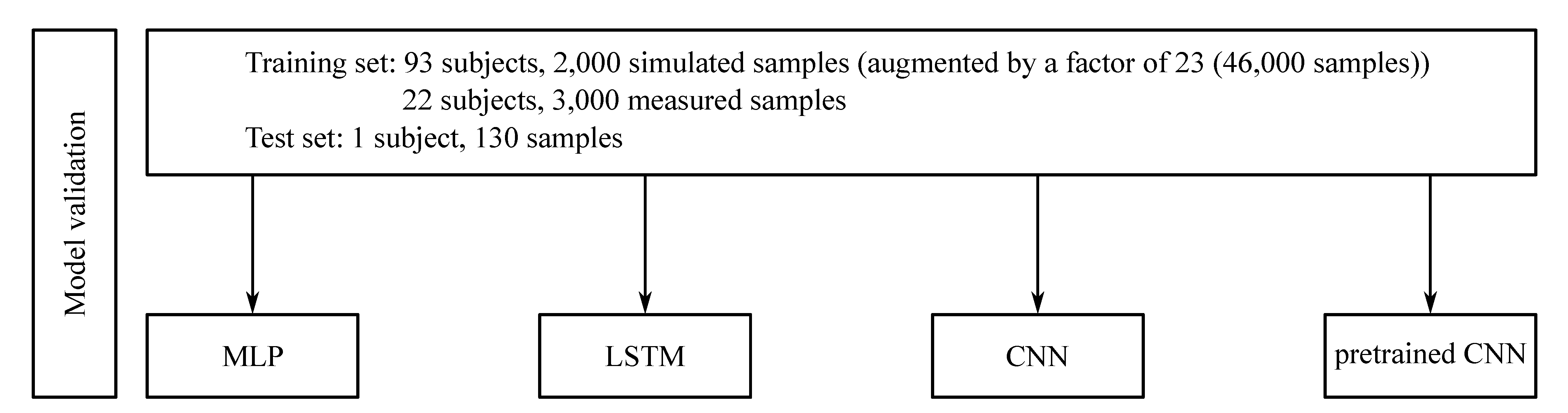
2.3. Neural Network Application
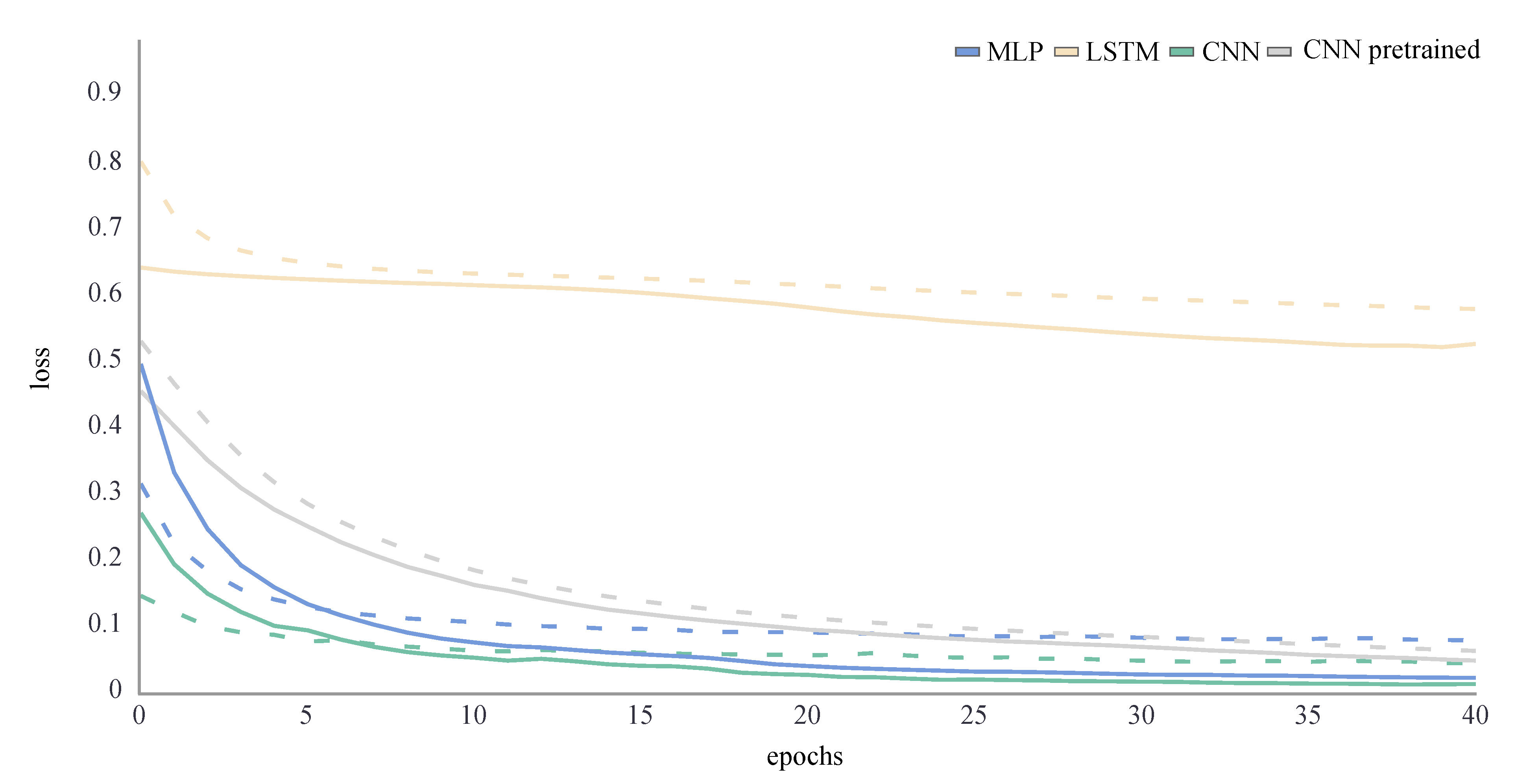
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Adesida, Y.; Papi, E.; McGregor, A.H. Exploring the role of wearable technology in sport kinematics and kinetics: A systematic review. Sensors 2019, 19, 1597. [Google Scholar] [CrossRef] [Green Version]
- Gurchiek, R.D.; Cheney, N.; Mcginnis, R.S. Estimating Biomechanical Time-Series with Wearable Sensors: A Systematic Review of Machine Learning Techniques. Sensors 2019, 19, 5227. [Google Scholar] [CrossRef] [Green Version]
- Kobsar, D.; Charlton, J.M.; Tse, C.T.; Esculier, J.F.; Graffos, A.; Krowchuk, N.M.; Thatcher, D.; Hunt, M.A. Validity and reliability of wearable inertial sensors in healthy adult walking: A systematic review and meta-analysis. J. Neuroeng. Rehabil. 2020, 17, 1–21. [Google Scholar] [CrossRef]
- Wu, G.; Siegler, S.; Allard, P.; Kirtley, C.; Leardini, A.; Rosenbaum, D.; Whittle, M.; D’Lima, D.D.; Cristofolini, L.; Witte, H.; et al. ISB recommendation on definitions of joint coordinate system of various joints for the reporting of human joint motion—Part I: Ankle, hip, and spine. J. Biomech. 2002, 35, 543–548. [Google Scholar] [CrossRef]
- Vitali, R.V.; Perkins, N.C. Determining anatomical frames via inertial motion capture: A survey of methods. J. Biomech. 2020, 106, 109832. [Google Scholar] [CrossRef]
- Caruso, M.; Sabatini, A.M.; Laidig, D.; Seel, T.; Knaflitz, M.; Croce, U.D.; Cereatti, A. Analysis of the accuracy of ten algorithms for orientation estimation using inertial and magnetic sensing under optimal conditions: One size does not fit all. Sensors 2021, 21, 2543. [Google Scholar] [CrossRef]
- Palermo, E.; Rossi, S.; Marini, F.; Patanè, F.; Cappa, P. Experimental evaluation of accuracy and repeatability of a novel body-to-sensor calibration procedure for inertial sensor-based gait analysis. Meas. J. Int. Meas. Confed. 2014, 52, 145–155. [Google Scholar] [CrossRef]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Accuracy and repeatability of single-pose calibration of inertial measurement units for whole-body motion analysis. Gait Posture 2017, 54, 80–86. [Google Scholar] [CrossRef]
- Ancillao, A.; Tedesco, S.; Barton, J.; O’flynn, B. Indirect measurement of ground reaction forces and moments by means of wearable inertial sensors: A systematic review. Sensors 2018, 18, 2564. [Google Scholar] [CrossRef] [Green Version]
- Wouda, F.J.; Giuberti, M.; Bellusci, G.; Maartens, E.; Reenalda, J.; van Beijnum, B.J.F.; Veltink, P. Estimation of Vertical Ground Reaction Forces and Sagittal Knee Kinematics During Running Using Three Inertial Sensors. Front. Physiol. 2018, 9, 1–14. [Google Scholar] [CrossRef]
- Dorschky, E.; Nitschke, M.; Martindale, C.F.; van den Bogert, A.J.; Koelewijn, A.D.; Eskofier, B.M. CNN-Based Estimation of Sagittal Plane Walking and Running Biomechanics From Measured and Simulated Inertial Sensor Data. Front. Bioeng. Biotechnol. 2020, 8, 1–14. [Google Scholar] [CrossRef]
- Lim, H.; Kim, B.; Park, S. Prediction of Lower Limb Kinetics and Kinematics during Walking by a Single IMU on the Lower Back Using Machine Learning. Sensors 2020, 20, 130. [Google Scholar] [CrossRef] [Green Version]
- Stetter, B.J.; Krafft, F.C.; Ringhof, S.; Stein, T.; Sell, S. A Machine Learning and Wearable Sensor Based Approach to Estimate External Knee Flexion and Adduction Moments During Various Locomotion Tasks. Front. Bioeng. Biotechnol. 2020, 8. [Google Scholar] [CrossRef] [PubMed]
- Mundt, M.; Koeppe, A.; David, S.; Witter, T.; Bamer, F.; Potthast, W.; Markert, B. Estimation of Gait Mechanics Based on Simulated and Measured IMU Data Using an Artificial Neural Network. Front. Bioeng. Biotechnol. 2020. [Google Scholar] [CrossRef]
- Rapp, E.; Shin, S.; Thomsen, W.; Ferber, R.; Halilaj, E. Estimation of kinematics from inertial measurement units using a combined deep learning and optimization framework. J. Biomech. 2021, 116. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016; Available online: http://www.deeplearningbook.org (accessed on 1 October 2020).
- Mundt, M.; Thomsen, W.; Witter, T.; Koeppe, A.; David, S.; Bamer, F.; Potthast, W.; Markert, B. Prediction of lower limb joint angles and moments during gait using artificial neural networks. Med. Biol. Eng. Comput. 2020, 58, 211–225. [Google Scholar] [CrossRef]
- Johnson, W.R.; Alderson, J.; Lloyd, D.; Mian, A.S. Predicting Athlete Ground Reaction Forces and Moments From Spatio-Temporal Driven CNN Models. IEEE Trans. Biomed. Eng. 2019, 66, 689–694. [Google Scholar] [CrossRef] [Green Version]
- Johnson, W.R.; Mian, A.; Robinson, M.A.; Verheul, J.; Lloyd, D.G.; Alderson, J. Multidimensional ground reaction forces and moments from wearable sensor accelerations via deep learning. IEEE Trans. Biomed. Eng. 2020, 1–12. [Google Scholar] [CrossRef]
- Mundt, M.; Koeppe, A.; Bamer, F.; David, S.; Markert, B. Artificial Neural Networks in Motion Analysis—Applications of Unsupervised and Heuristic Feature Selection Techniques. Sensors 2020, 20, 4581. [Google Scholar] [CrossRef]
- Komnik, I.; Peters, M.; Funken, J.; David, S.; Weiss, S.; Potthast, W. Non-sagittal knee joint kinematics and kinetics during gait on level and sloped grounds with unicompartmental and total knee arthroplasty patients. PLoS ONE 2016, 11, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Dupré, T.; Dietzsch, M.; Komnik, I.; Potthast, W.; David, S. Agreement of measured and calculated muscle activity during highly dynamic movements modelled with a spherical knee joint. J. Biomech. 2019, 84, 73–80. [Google Scholar] [CrossRef]
- Mundt, M.; Thomsen, W.; Bamer, F.; Markert, B. Determination of gait parameters in real-world environment using low-cost inertial sensors. PAMM 2018, 18. [Google Scholar] [CrossRef]
- Mundt, M.; Thomsen, W.; David, S.; Dupré, T.; Bamer, F.; Potthast, W.; Markert, B. Assessment of the measurement accuracy of inertial sensors during different tasks of daily living. J. Biomech. 2019, 84, 81–86. [Google Scholar] [CrossRef] [PubMed]
- Robertson, G.; Caldwell, G.; Hamill, J.; Kamen, G.; Whittlesey, S. Research Methods in Biomechanics, 2nd ed.; Human Kinetics: Champaign, IL, USA, 2013. [Google Scholar]
- Li, L.; Jamieson, K.; DeSalvo, G.; Rostamizadeh, A.; Talwalkar, A. Hyperband: A novel bandit-based approach to hyperparameter optimization. J. Mach. Learn. Res. 2018, 18, 1–52. [Google Scholar]
- Koeppe, A.; Bamer, F.; Markert, B. An efficient Monte Carlo strategy for elasto-plastic structures based on recurrent neural networks. Acta Mech. 2019, 230, 3279–3293. [Google Scholar] [CrossRef]
- Mundt, M.; Koeppe, A.; David, S.; Bamer, F.; Potthast, W. Prediction of ground reaction force and joint moments based on optical motion capture data during gait. Med. Eng. Phys. 2020, 86, 29–34. [Google Scholar] [CrossRef]
- Johnson, W.R.; Mian, A.; Lloyd, D.G.; Alderson, J. On-field player workload exposure and knee injury risk monitoring via deep learning. J. Biomech. 2019, 93, 185–193. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint Angles | ||||
|---|---|---|---|---|
| ANN | Layers | Learning Rate | Dropout | Activation |
| MLP | 6000–4000 | 0.0003 | 0.5 | relu |
| LSTM | 32–32 | 0.0003 | 0.7 | tanh |
| CNN | 3000–6000 | 0.00003 | 0.4 | relu |
| Joint Moments | ||||
| ANN | Layers | Learning Rate | Dropout | Activation |
| MLP | 3000–1000 | 0.0003 | 0.5 | relu |
| LSTM | 128–1024 | 0.0003 | 0.4 | tanh |
| CNN | 2000–4000 | 0.0001 | 0.4 | relu |
| Joint Angles | ||||
|---|---|---|---|---|
| LSTM vs. MLP [%] | CNN vs. MLP [%] | Pretrained CNN vs. CNN [%] | ||
| flex/ext | 20.25 | 35.57 | −5.79 | |
| hip | add/abd | 7.47 | 13.43 | −4.81 |
| int/ext rot | −25.20 | 2.80 | 5.40 | |
| flex/ext | 11.41 | 27.70 | −6.38 | |
| knee | add/abd | −8.55 | 5.31 | −9.50 |
| int/ext rot | −14.03 | 4.18 | 1.21 | |
| plantar−dorsiflex | −2.38 | 12.53 | −9.88 | |
| ankle | inv/ev | −5.61 | 2.87 | −3.03 |
| int/ext rot | −7.67 | 2.61 | −1.08 | |
| Joint Moments | ||||
| LSTM vs. MLP [%] | CNN vs. MLP [%] | Pretrained CNN vs. CNN [%] | ||
| flex/ext | 4.13 | 20.64 | −9.27 | |
| hip | add/abd | 3.07 | 17.29 | −1.83 |
| int/ext rot | −5.73 | 6.37 | −2.07 | |
| flex/ext | −10.49 | 5.59 | −4.01 | |
| knee | add/abd | 0.18 | 12.17 | −5.76 |
| int/ext rot | −1.81 | 7.89 | −2.39 | |
| plantar−dorsiflex | 7.30 | 13.90 | −0.83 | |
| ankle | inv/ev | −7.39 | −0.62 | 4.92 |
| int/ext rot | −4.79 | 3.37 | −3.99 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mundt, M.; Johnson, W.R.; Potthast, W.; Markert, B.; Mian, A.; Alderson, J. A Comparison of Three Neural Network Approaches for Estimating Joint Angles and Moments from Inertial Measurement Units. Sensors 2021, 21, 4535. https://doi.org/10.3390/s21134535
Mundt M, Johnson WR, Potthast W, Markert B, Mian A, Alderson J. A Comparison of Three Neural Network Approaches for Estimating Joint Angles and Moments from Inertial Measurement Units. Sensors. 2021; 21(13):4535. https://doi.org/10.3390/s21134535
Chicago/Turabian StyleMundt, Marion, William R. Johnson, Wolfgang Potthast, Bernd Markert, Ajmal Mian, and Jacqueline Alderson. 2021. "A Comparison of Three Neural Network Approaches for Estimating Joint Angles and Moments from Inertial Measurement Units" Sensors 21, no. 13: 4535. https://doi.org/10.3390/s21134535
APA StyleMundt, M., Johnson, W. R., Potthast, W., Markert, B., Mian, A., & Alderson, J. (2021). A Comparison of Three Neural Network Approaches for Estimating Joint Angles and Moments from Inertial Measurement Units. Sensors, 21(13), 4535. https://doi.org/10.3390/s21134535