
Deep-Learning and Vibration-Based System for Wear Size Estimation of Railway Switches and Crossings



Abstract
:1. Introduction
2. Deep-Learning Algorithms for Feature Learning
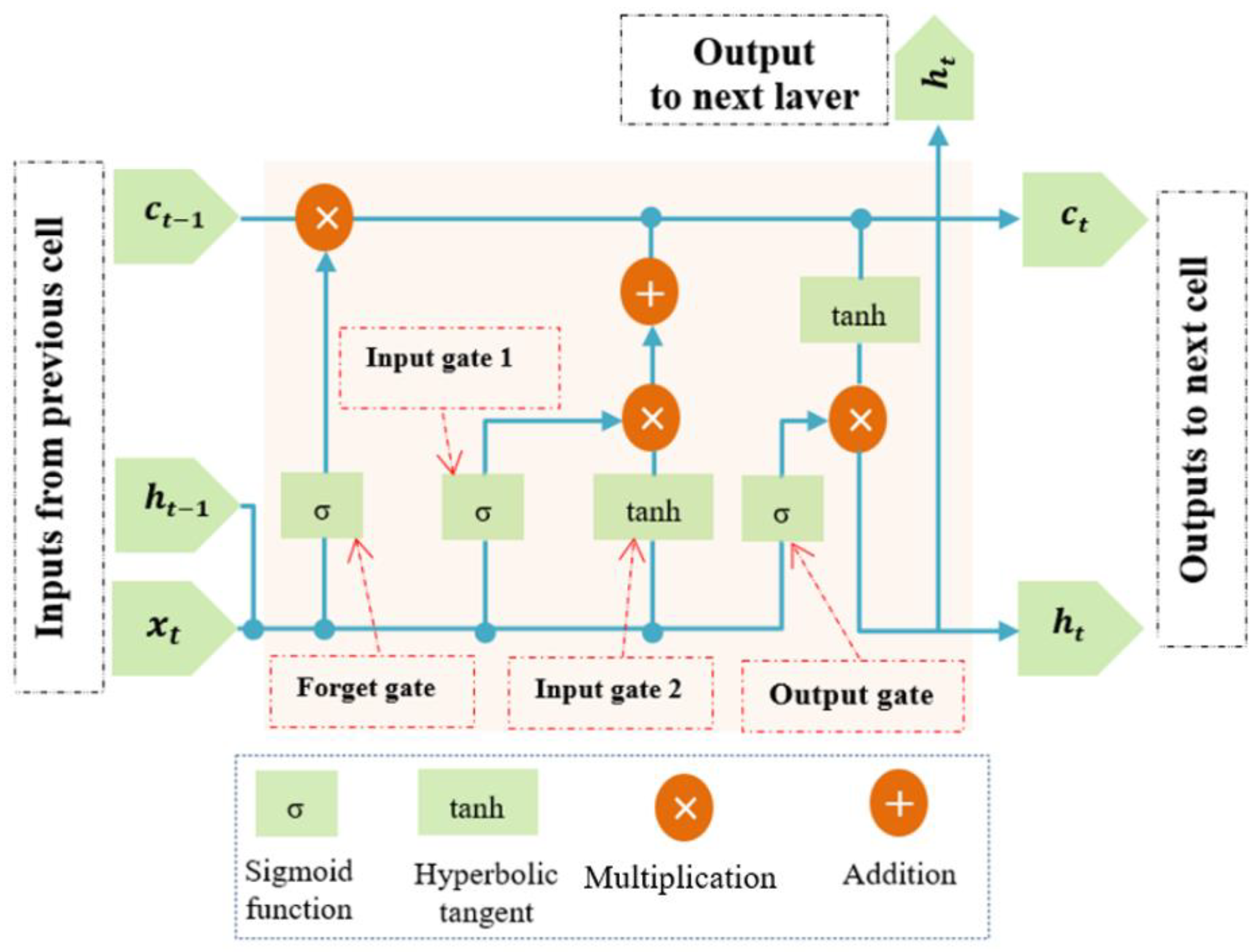
2.1. Long Short-Term Memory (LSTM) for Feature Learning
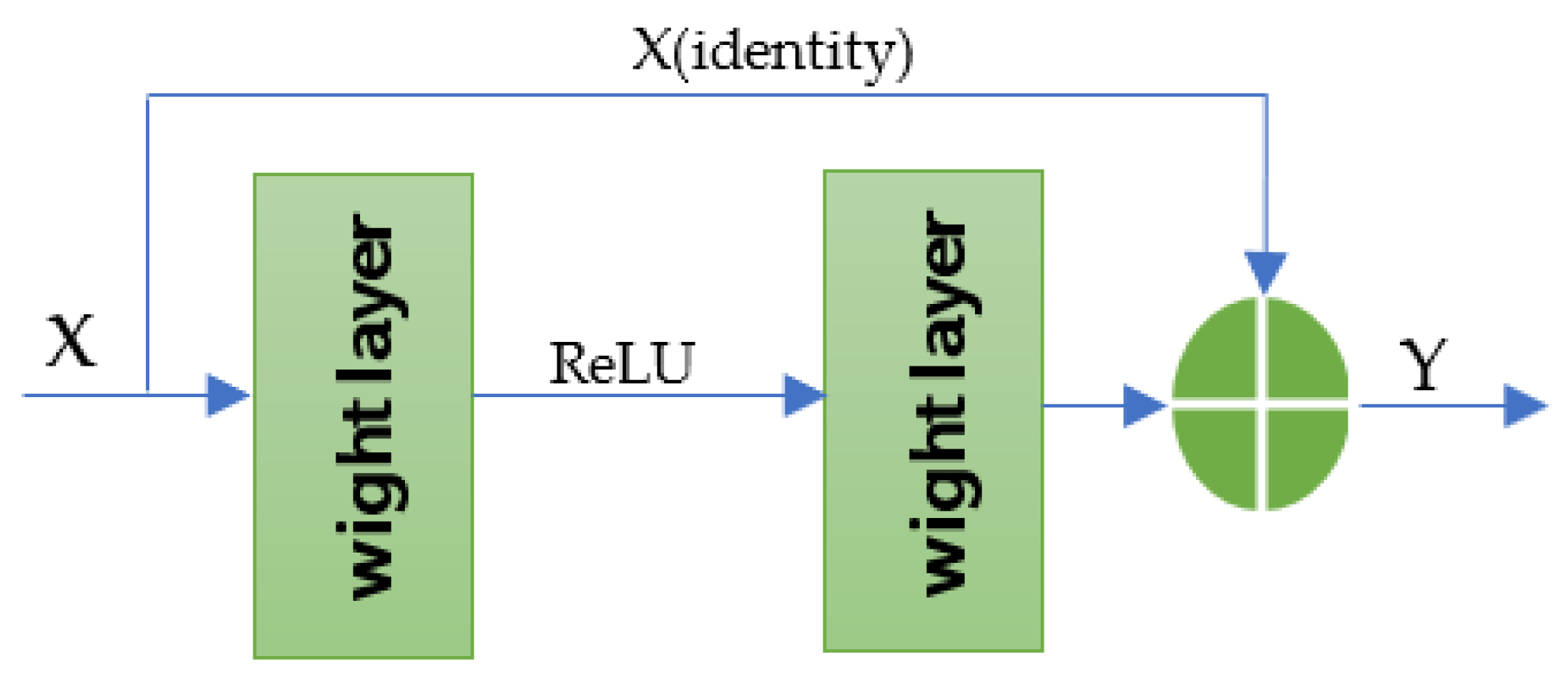
2.2. The Residual Neural Network (ResNet) for Feature Learning
3. Materials and Methods
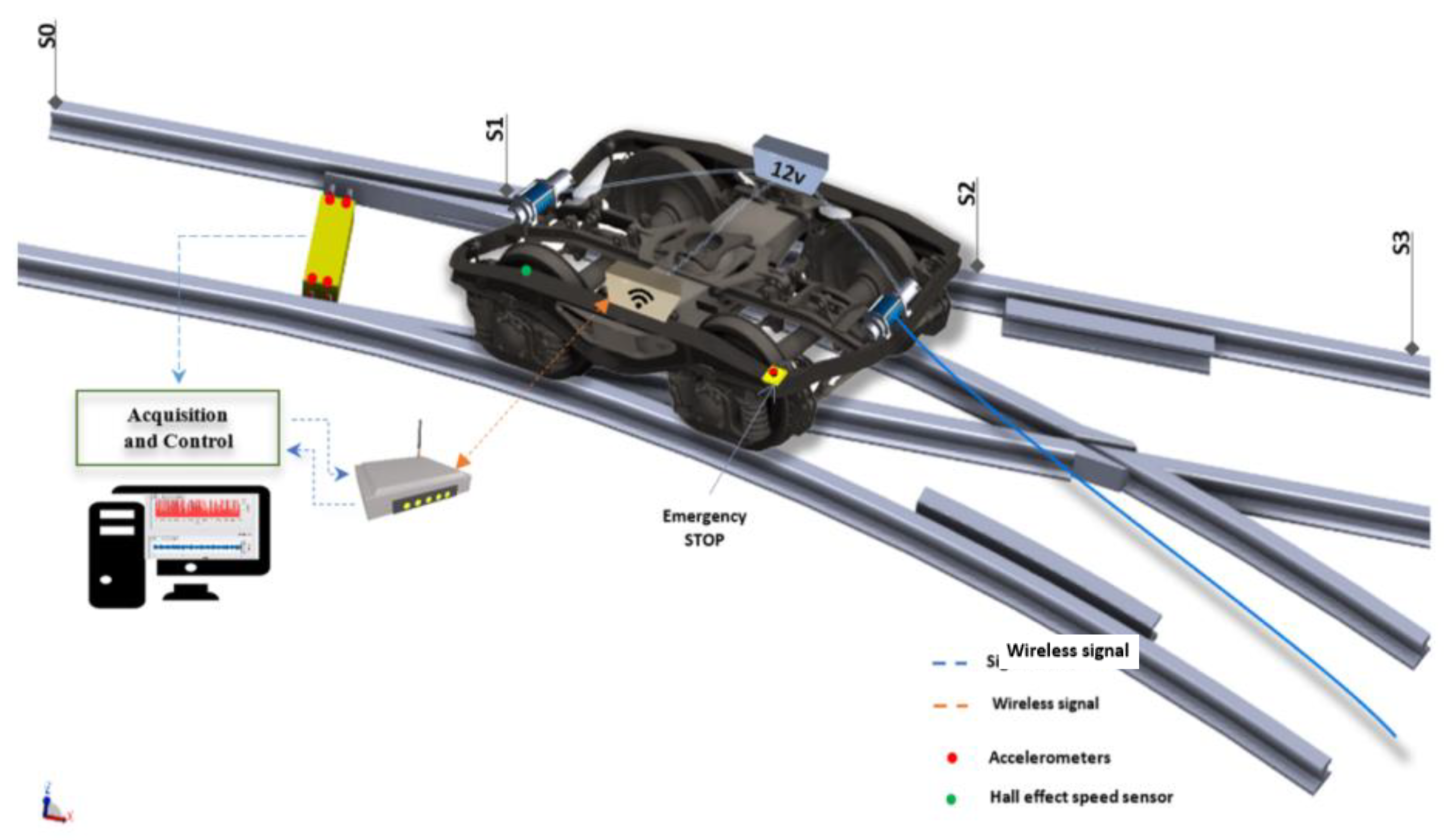
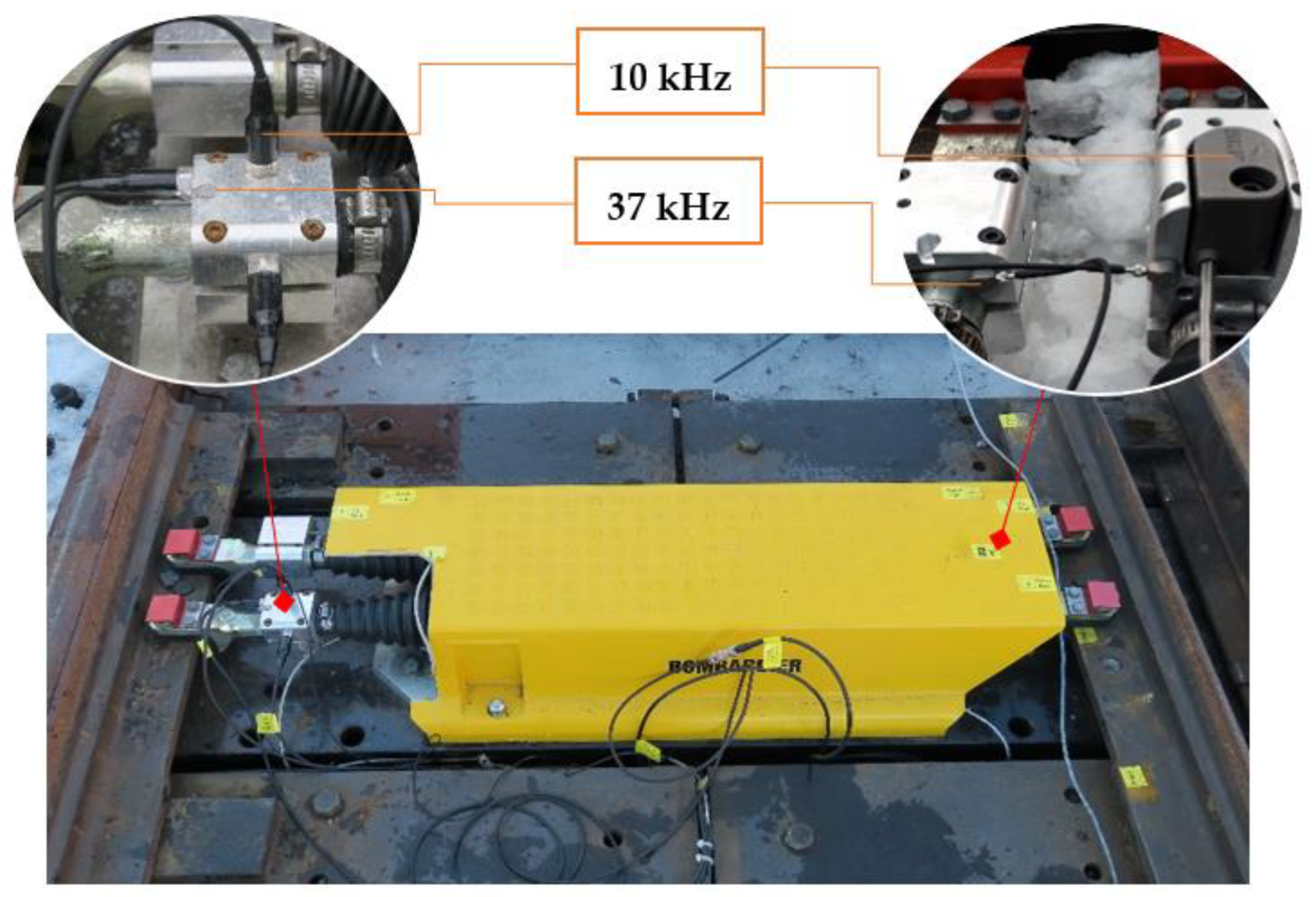
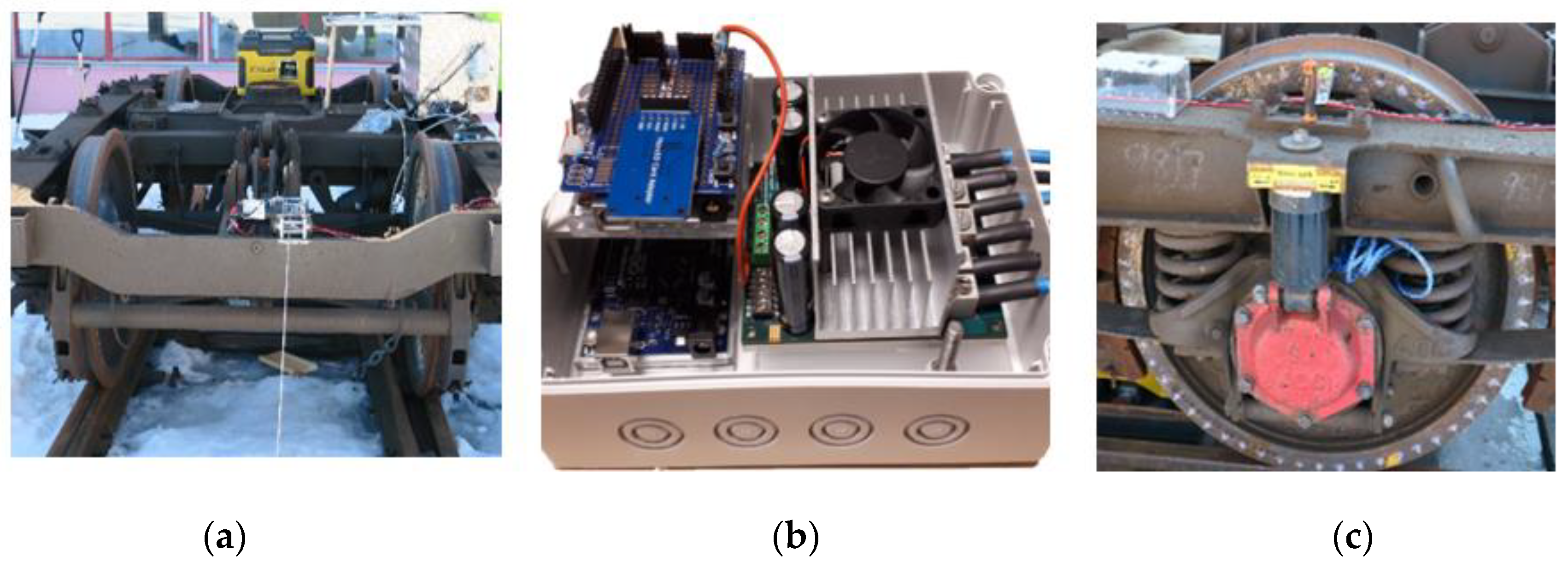
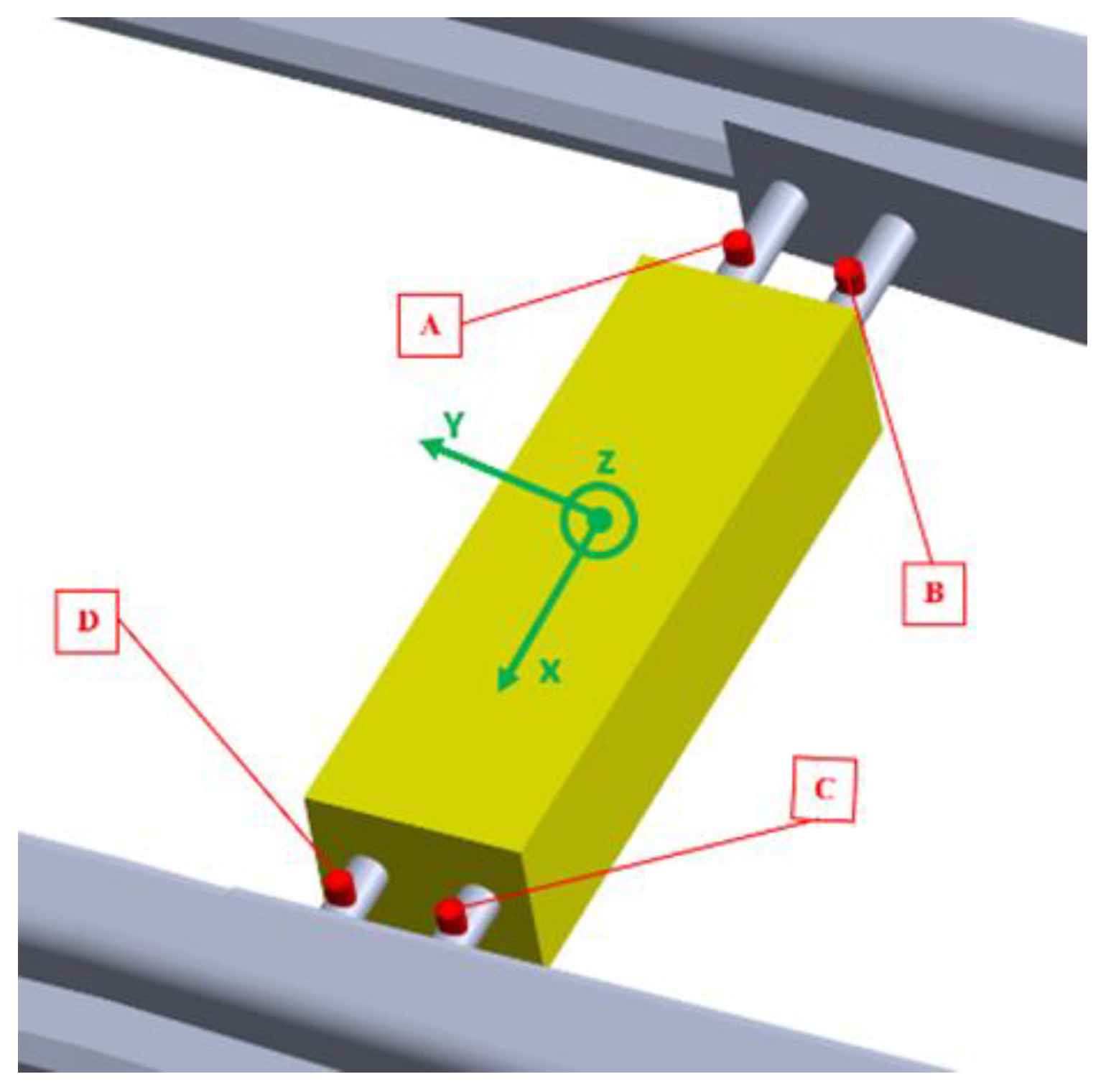
3.1. Experimental Set Up and Sensors Placement
3.2. Data Aquisition for Vibration and Speed
3.3. Wear Severity Classification Using LSTM and RESNET
3.3.1. LSTM Model for Wear Severity Classification
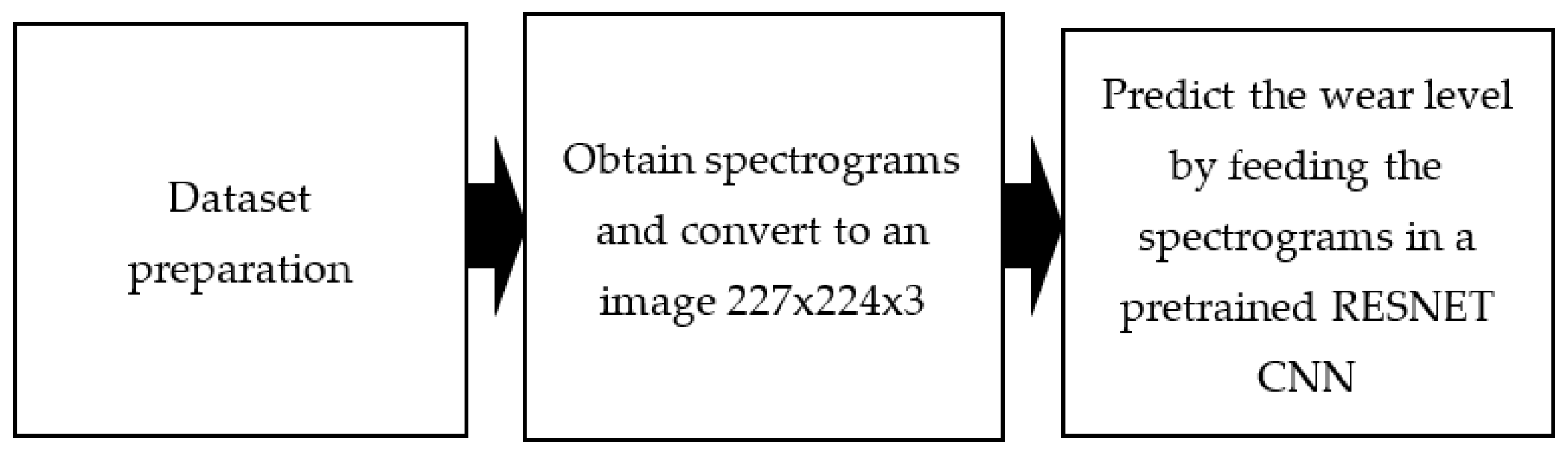
3.3.2. ResNet Model for Wear Severity Classification
4. Results and Discussion
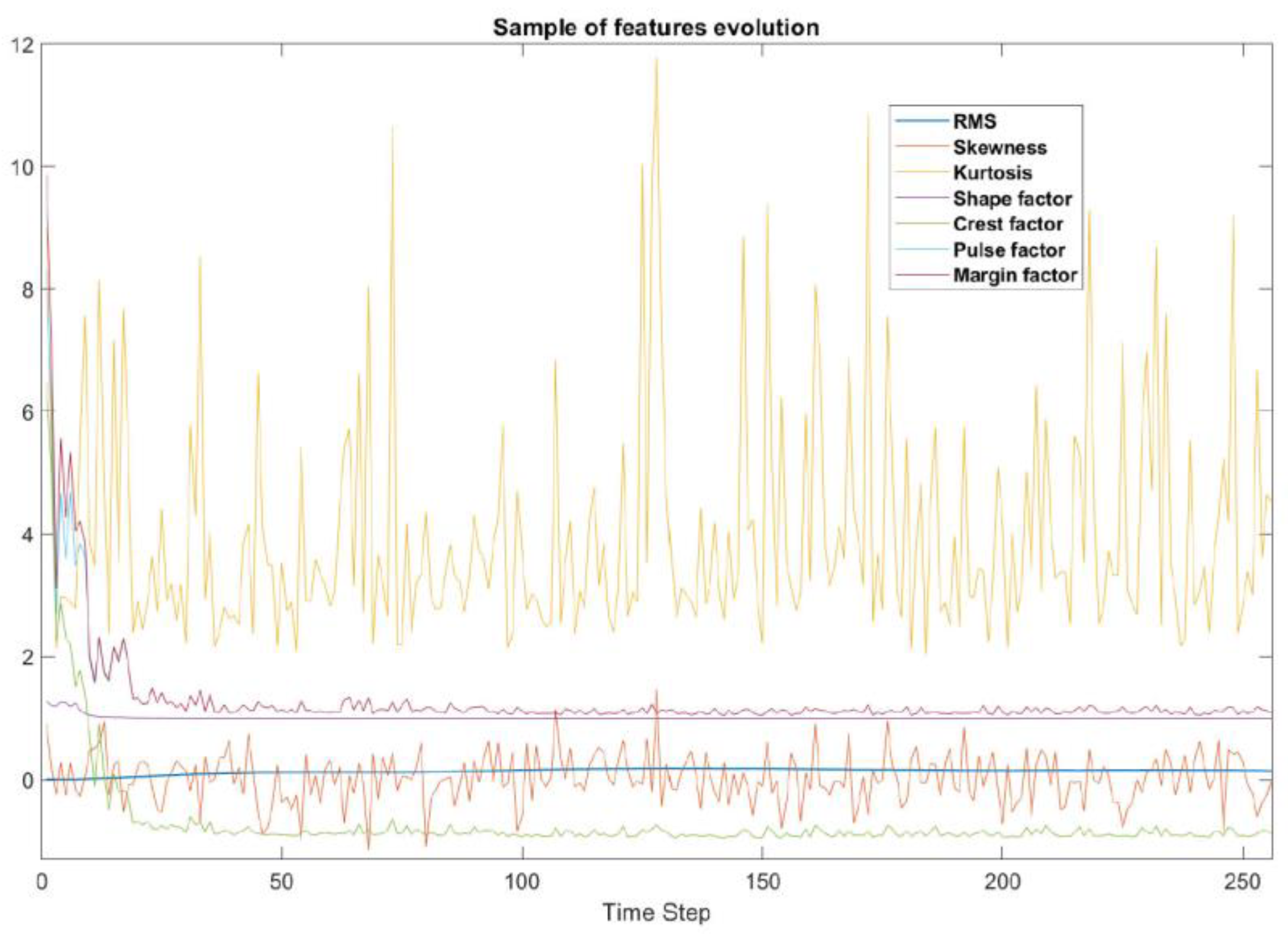
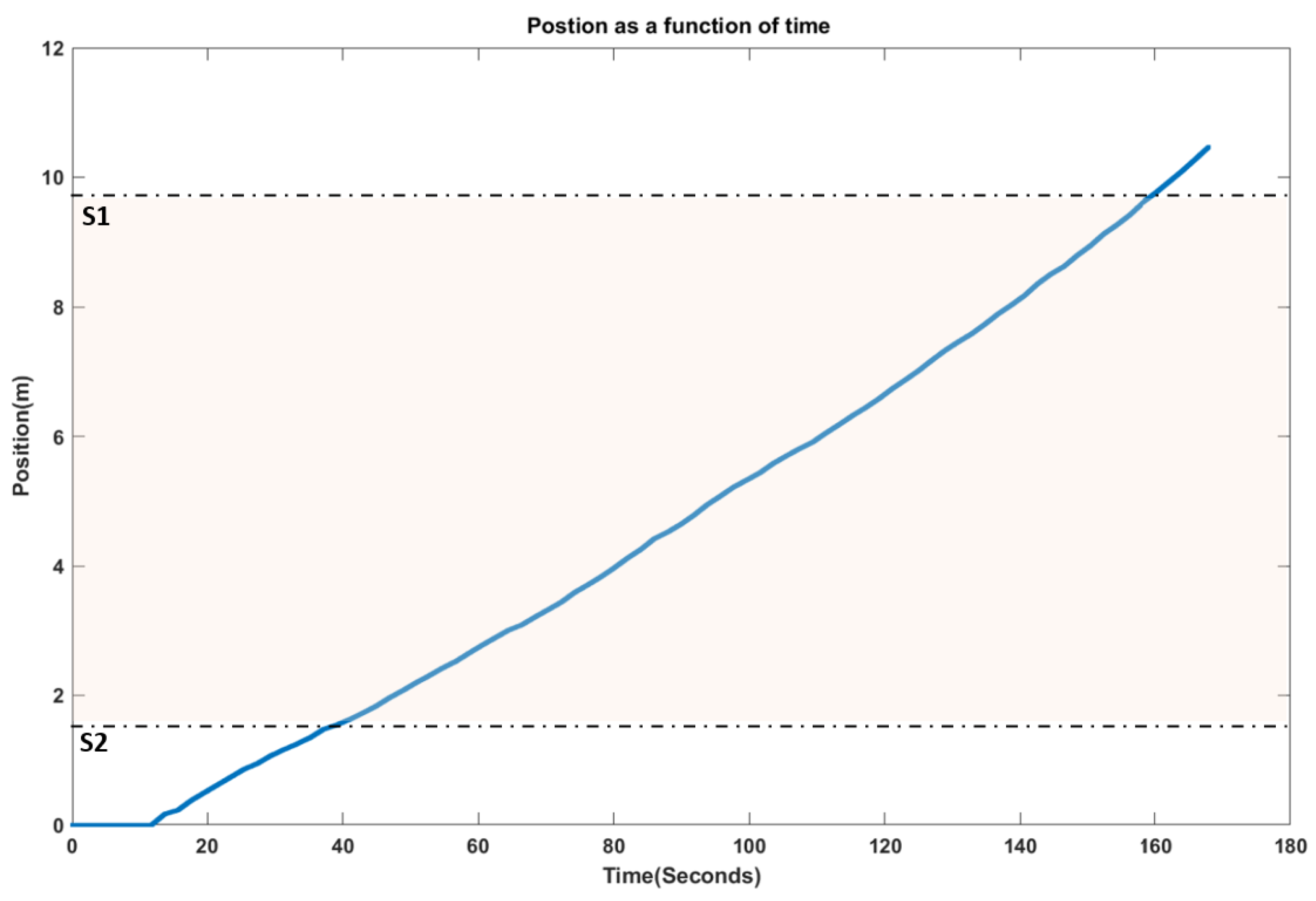
4.1. Vibration Measurements
4.2. Wear Measurement
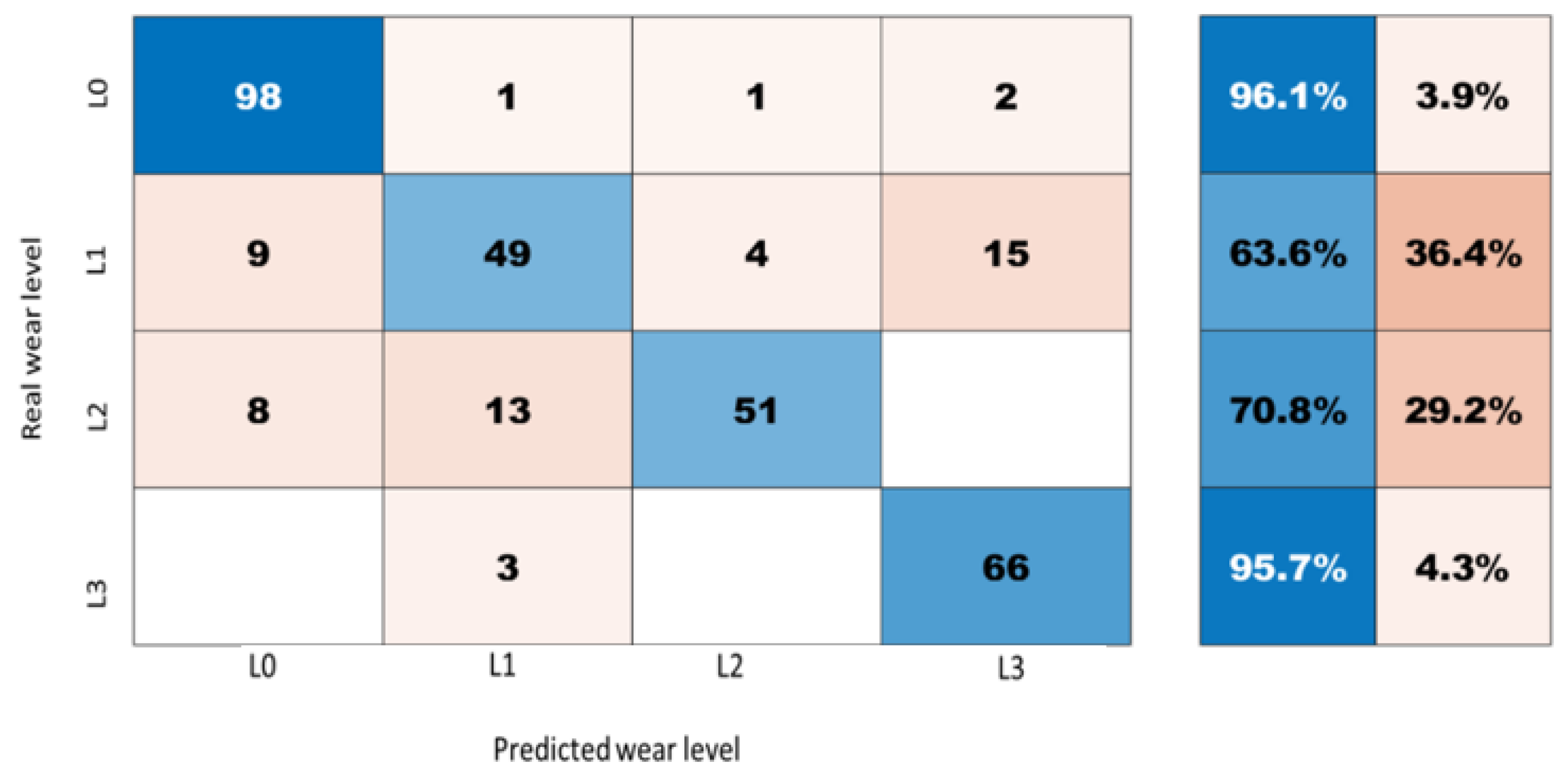
4.3. Wear Measurement Using LSTM Model
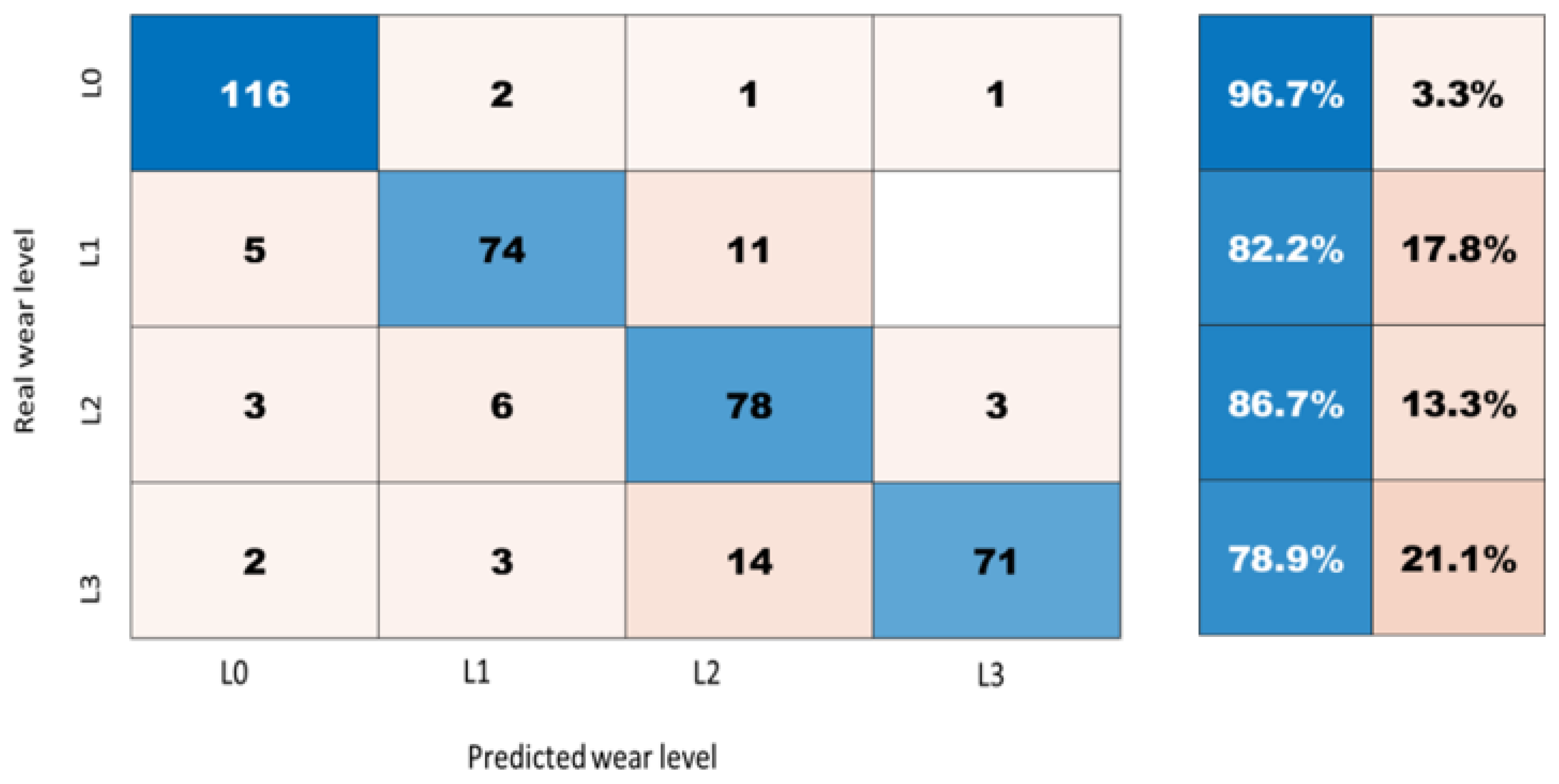
4.4. Wear Measurement Using ResNet Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lewis, T.D.; Jiang, J.Z.; Neild, S.A.; Gong, C.; Iwnicki, S.D. Using an inerter-based suspension to improve both passenger comfort and track wear in railway vehicles. Veh. Syst. Dyn. 2020, 58, 472–493. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Z.; Liu, Z.; Wang, R. A spatial coupling model to study dynamic performance of pantograph-catenary with vehicle-track excitation. Mech. Syst. Signal Process. 2021, 151, 107336. [Google Scholar] [CrossRef]
- Kouroussis, G.; Caucheteur, C.; Kinet, D.; Alexandrou, G.; Verlinden, O.; Moeyaert, V. Review of Trackside Monitoring Solutions: From Strain Gages to Optical Fibre Sensors. Sensors 2015, 15, 20115–20139. [Google Scholar] [CrossRef] [Green Version]
- Soleimani, H.; Moavenian, M. Tribological Aspects of Wheel–Rail Contact: A Review of Wear Mechanisms and Effective Factors on Rolling Contact Fatigue. Urban Rail Transit 2017, 3, 227–237. [Google Scholar] [CrossRef] [Green Version]
- De Arizon, J.; Verlinden, O.; Dehombreux, P. Prediction of wheel wear in urban railway transport: Comparison of existing models. Veh. Syst. Dyn. 2007, 45, 849–866. [Google Scholar] [CrossRef]
- Bogdaniuk, B.; Massel, A.; Radomski, R. Increasing rail life by forecasting fatigue failure. NDT E Int. 2003, 36, 131–134. [Google Scholar] [CrossRef]
- Turabimana, P.; Nkundineza, C. Development of an On-Board Measurement System for Railway Vehicle Wheel Flange Wear. Sensors 2020, 20, 303. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murray, C.A.; Take, W.A.; Hoult, N.A. Measurement of vertical and longitudinal rail displacements using digital image correlation. Can. Geotech. J. 2015, 52, 141–155. [Google Scholar] [CrossRef]
- Pinto, N.; Ribeiro, C.A.; Gabriel, J.; Calçada, R. Dynamic monitoring of railway track displacement using an optical system. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2015, 229, 280–290. [Google Scholar] [CrossRef]
- Cai, Y.; Cao, Z.; Sun, H.; Xu, C. Effects of the dynamic wheel–rail interaction on the ground vibration generated by a moving train. Int. J. Solids Struct. 2010, 47, 2246–2259. [Google Scholar] [CrossRef] [Green Version]
- Delprete, C.; Rosso, C. An easy instrument and a methodology for the monitoring and the diagnosis of a rail. Mech. Syst. Signal Process. 2009, 23, 940–956. [Google Scholar] [CrossRef]
- Meghoe, A.; Loendersloot, R.; Tinga, T. Rail wear and remaining life prediction using meta-models. Int. J. Rail Transp. 2020, 8, 1–26. [Google Scholar] [CrossRef]
- Grohmann, H.; Hempelmann, K.; Groß-Thebing, A. A new type of RCF, experimental investigations and theoretical modelling. Wear 2002, 253, 67–74. [Google Scholar] [CrossRef]
- Clayton, P. Predicting the wear of rails on curves from laboratory data. Wear 1995, 181–183, 11–19. [Google Scholar] [CrossRef]
- Yuejian, C.; Zongyi, X.; Jianwei, L.; Yong, Q. The analysis of wheel-rail vibration signal based on frequency slice wavelet transform. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1312–1316. [Google Scholar]
- Tsunashima, H. Condition Monitoring of Railway Tracks from Car-Body Vibration Using a Machine Learning Technique. Appl. Sci. 2019, 9, 2734. [Google Scholar] [CrossRef] [Green Version]
- Palo, M.; Galar, D.; Nordmark, T.; Asplund, M.; Larsson, D. Condition monitoring at the wheel/rail interface for decision-making support. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2014, 228, 705–715. [Google Scholar] [CrossRef]
- Rosin, A. Control, Supervision and Operation Diagnostics of Light Rail Electric Transport. Ph.D. Dissertation, Tallinn University of Technology, Tallinn, Estonia, 2005. [Google Scholar]
- Rusu, M.F. Automation of Railway Switch and Crossing Inspection. Ph.D. Dissertation, University of Birmingham, Birmingham, UK, 2015. [Google Scholar]
- Nissen, A. LCC-analysis for switches and crossings: A case study from the Swedish railway network. Int. J. COMADEM 2009, 12, 10–19. [Google Scholar]
- Thompson, D. Sound Radiation from Wheels and Track. In Railway Noise and Vibration; Elsevier: Amsterdam, The Netherlands, 2009; pp. 175–222. [Google Scholar]
- Wang, L.-M.; Shao, Y.-M. Crack Fault Classification for Planetary Gearbox Based on Feature Selection Technique and K-means Clustering Method. Chin. J. Mech. Eng. 2018, 31, 4. [Google Scholar] [CrossRef] [Green Version]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Khajehei, H.; Ahmadi, A.; Soleimanmeigouni, I.; Haddadzade, M.; Nissen, A.; Jebelli, M.J.L. Prediction of track geometry degradation using artificial neural network: A case study. Int. J. Rail Transp. 2021, 1–20. [Google Scholar] [CrossRef]
- Ma, S.; Gao, L.; Liu, X.; Lin, J. Deep Learning for Track Quality Evaluation of High-Speed Railway Based on Vehicle-Body Vibration Prediction. IEEE Access 2019, 7, 185099–185107. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 1–26 July 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Ma, S.; Chu, F.; Han, Q. Deep residual learning with demodulated time-frequency features for fault diagnosis of planetary gearbox under nonstationary running conditions. Mech. Syst. Signal Process. 2019, 127, 190–201. [Google Scholar] [CrossRef]
- Li, S.; Yang, W.; Zhang, A.; Liu, H.; Huang, J.; Li, C.; Hu, J. A Novel Method of Bearing Fault Diagnosis in Time-Frequency Graphs Using InceptionResnet and Deformable Convolution Networks. IEEE Access 2020, 8, 92743–92753. [Google Scholar] [CrossRef]
- Lee, C.-Y.; Le, T.-A. Identifying Faults of Rolling Element Based on Persistence Spectrum and Convolutional Neural Network With ResNet Structure. IEEE Access 2021, 9, 78241–78252. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | Accelerometer | Frequency (kHz) | Direction |
|---|---|---|---|
| C | KS91C1 | 37 | Z |
| A | 608A11 | 10 | X |
| A | 608A11 | 10 | Y |
| A | 608A11 | 10 | Z |
| B | SKF 2310T | 10 | Y |
| D | SKF 2310T | 10 | Y |
| Features | Formula |
|---|---|
| Root Mean Square (RMS) | |
| Skewness | |
| Kurtosis | |
| Shape factor | |
| Crest factor | |
| Impulse factor | |
| Clearance (Margin) factor |
| When | Repetition |
|---|---|
| Orig. wear level 1 | 4 |
| 1st wear level | 3 |
| 2nd wear level | 3 |
| 3rd wear level | 3 |
| Tool Position | Orig. Wear Level | 1st Wear Level 1 | 2nd Wear Level 1 | 3rd Wear Level 1 |
|---|---|---|---|---|
| X0 | 0.51 | 1.31 | 2.62 | 3.82 |
| X3 | 1.63 | 2.36 | 4.48 | 5.92 |
| X6 | 4.30 | 4.54 | 6.54 | 8.00 |
| Z0 | 0.96 | 0.94 | 0.96 | 0.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Najeh, T.; Lundberg, J.; Kerrouche, A. Deep-Learning and Vibration-Based System for Wear Size Estimation of Railway Switches and Crossings. Sensors 2021, 21, 5217. https://doi.org/10.3390/s21155217
Najeh T, Lundberg J, Kerrouche A. Deep-Learning and Vibration-Based System for Wear Size Estimation of Railway Switches and Crossings. Sensors. 2021; 21(15):5217. https://doi.org/10.3390/s21155217
Chicago/Turabian StyleNajeh, Taoufik, Jan Lundberg, and Abdelfateh Kerrouche. 2021. "Deep-Learning and Vibration-Based System for Wear Size Estimation of Railway Switches and Crossings" Sensors 21, no. 15: 5217. https://doi.org/10.3390/s21155217
APA StyleNajeh, T., Lundberg, J., & Kerrouche, A. (2021). Deep-Learning and Vibration-Based System for Wear Size Estimation of Railway Switches and Crossings. Sensors, 21(15), 5217. https://doi.org/10.3390/s21155217