
A Vibration Sensor-Based Method for Generating the Precise Rotor Orbit Shape with General Notch Filter Method for New Rotor Seal Design Testing and Diagnostics


Abstract
:1. Introduction
2. Magnetic Bearing Control and Compensation Methods
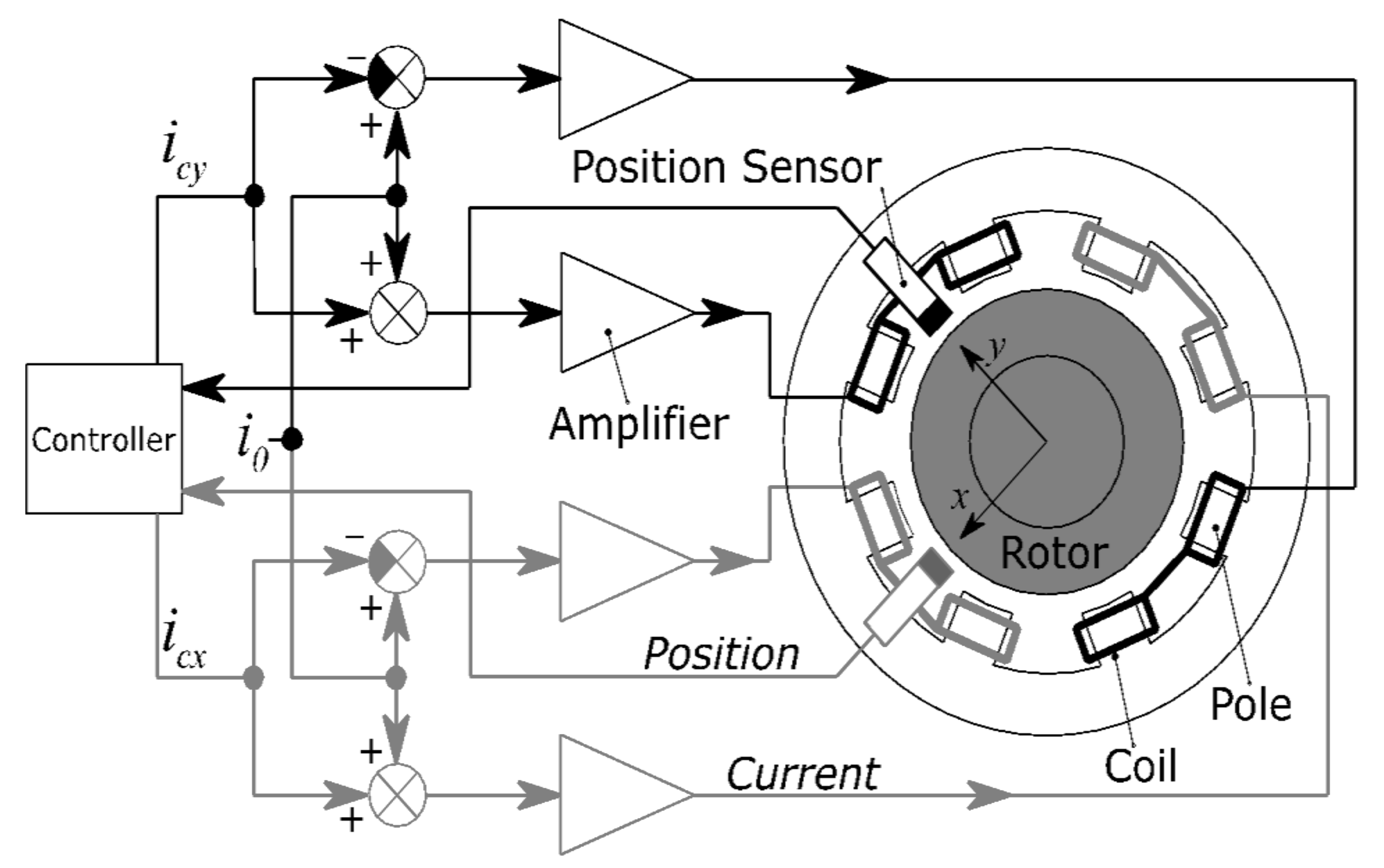
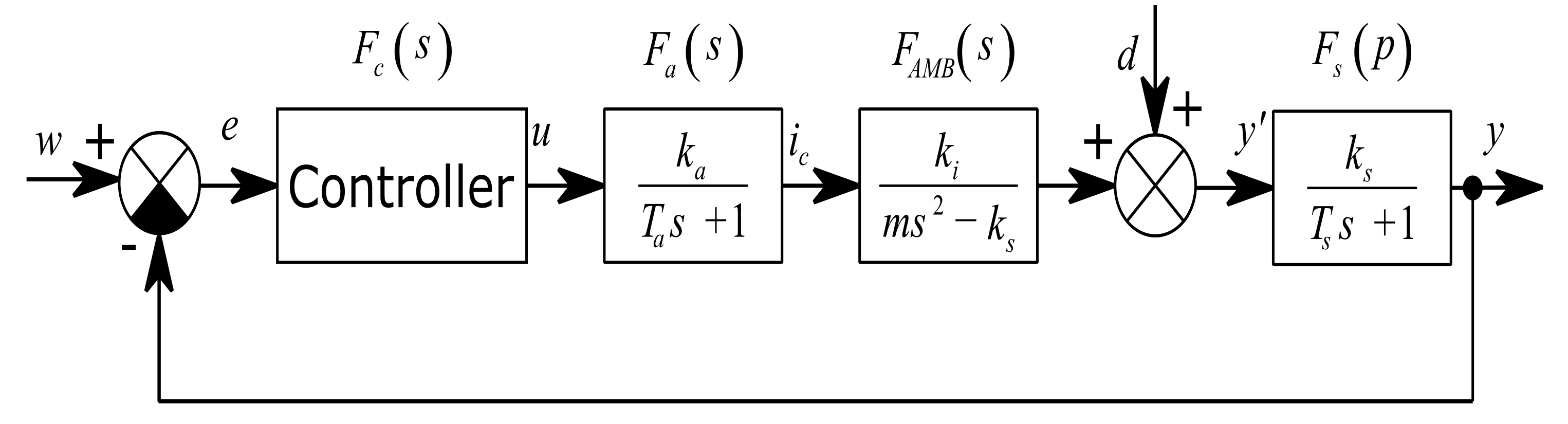
2.1. AMB Rotor System
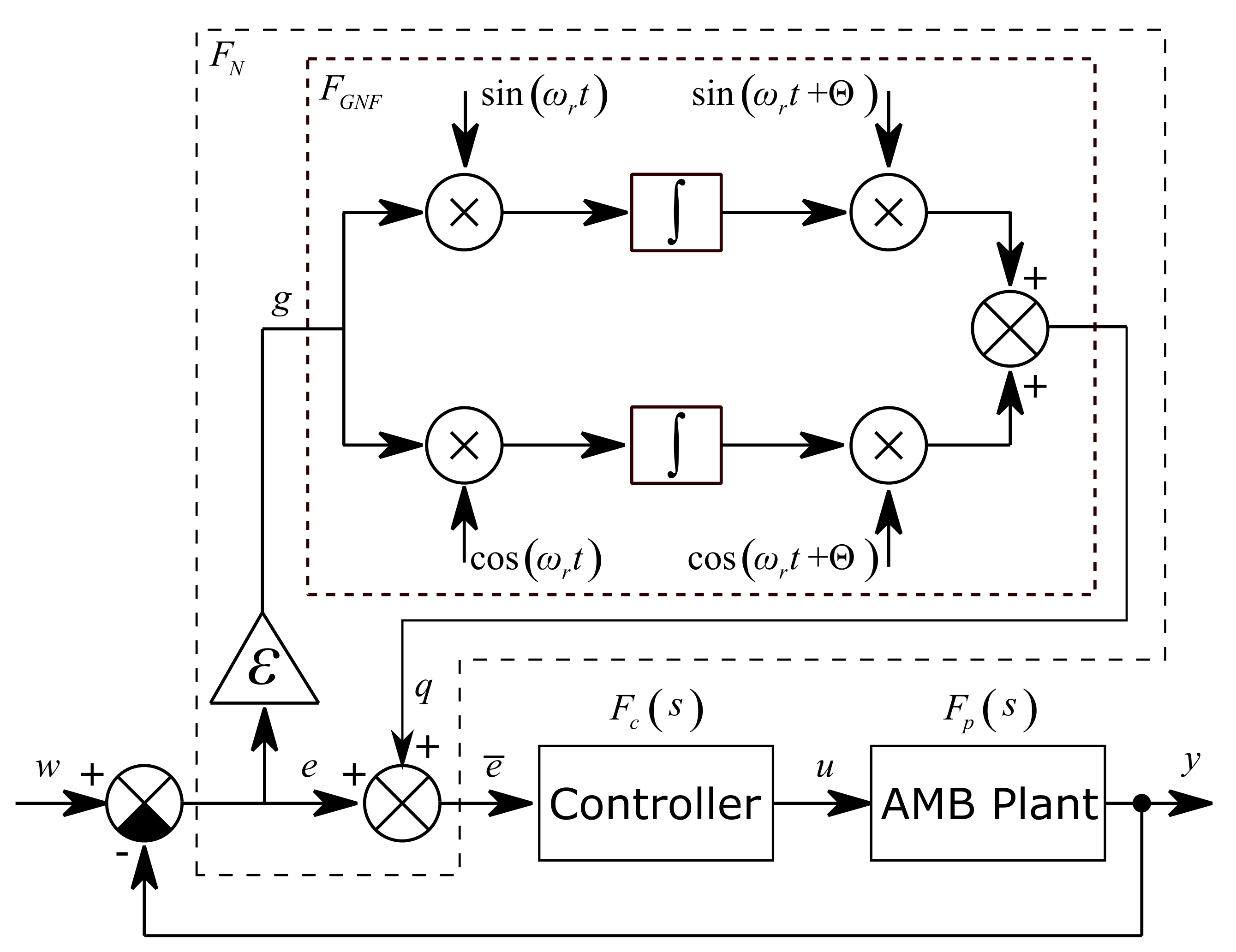
2.2. Unbalance Compensation
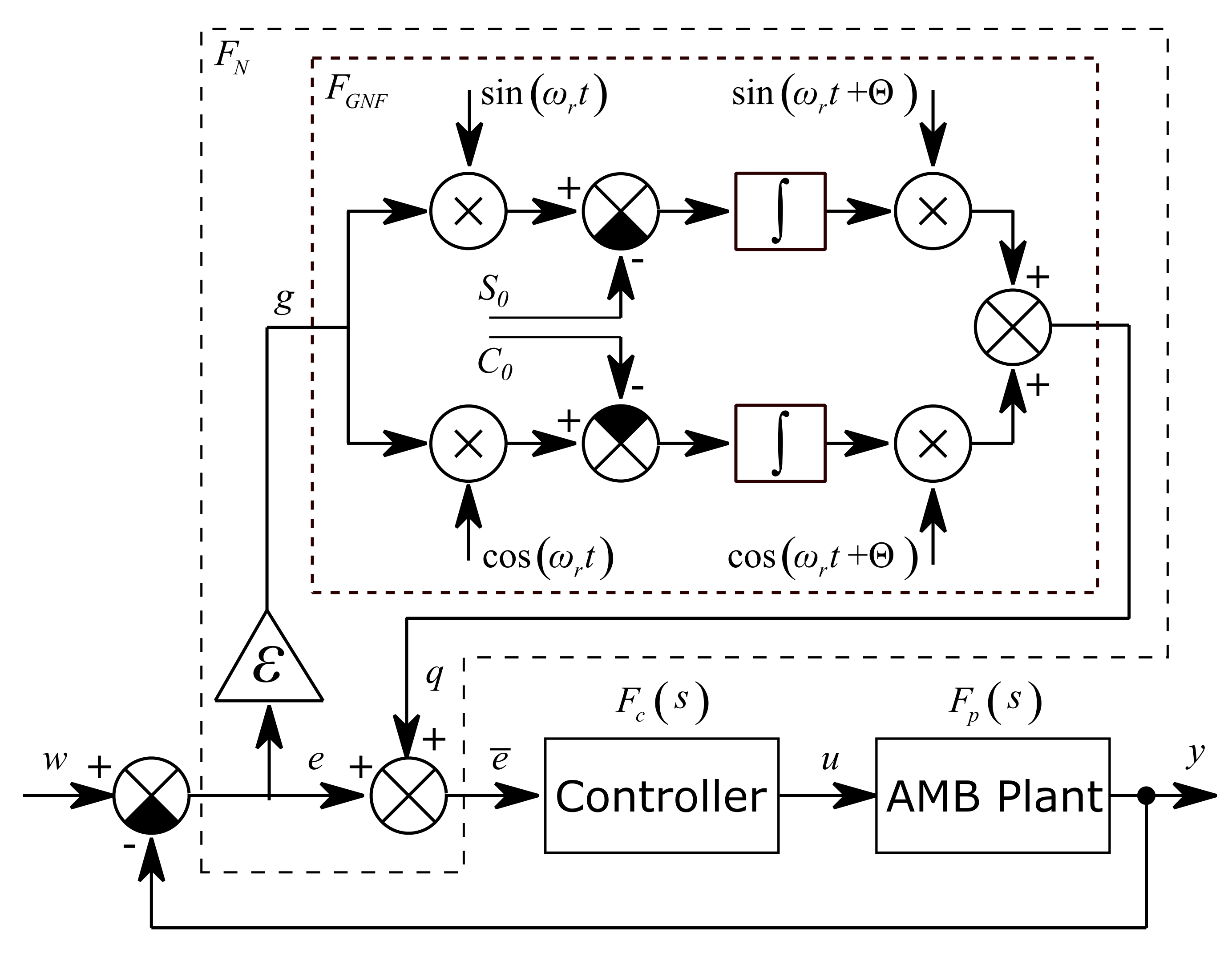
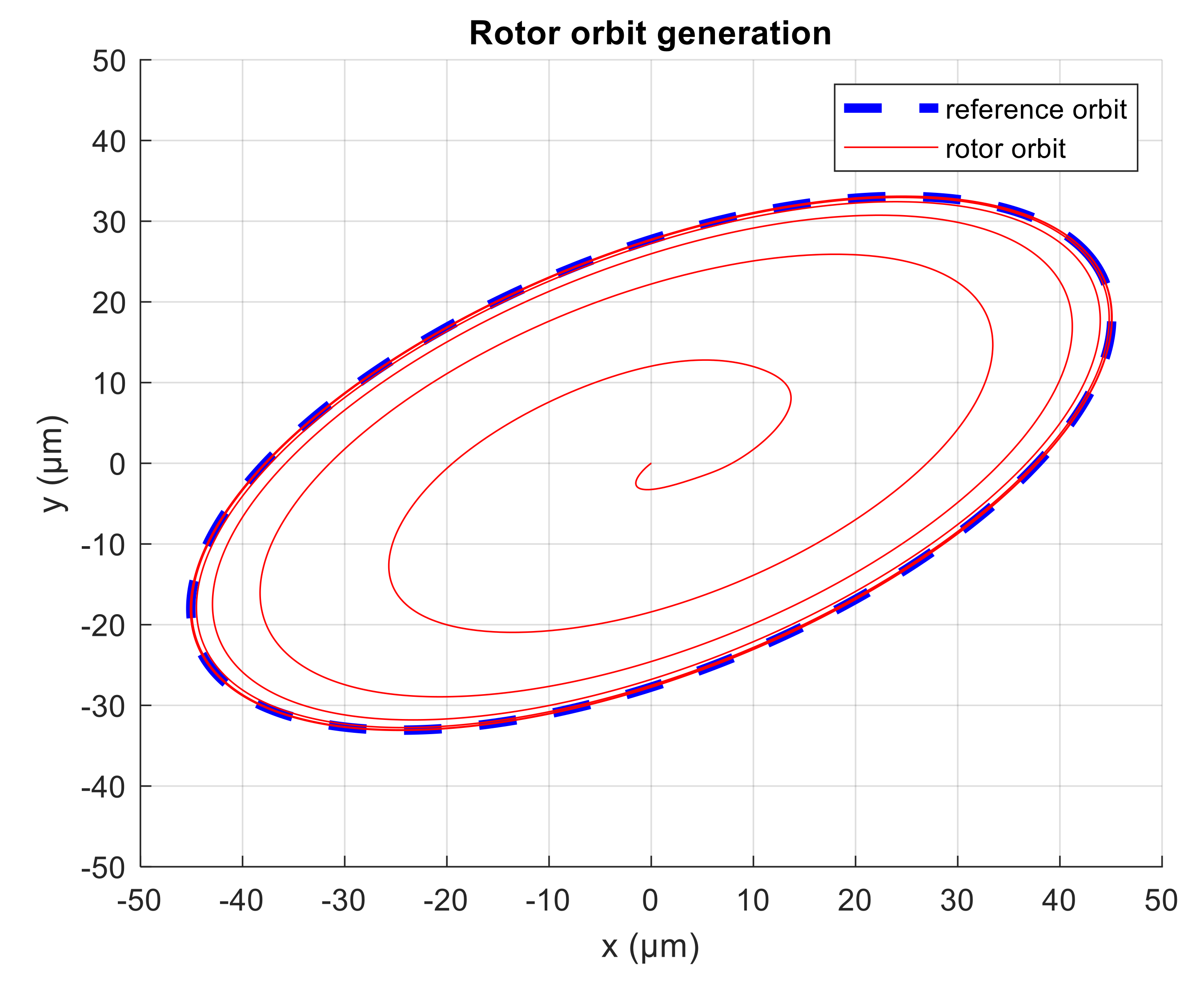
2.3. Orbit Generation
3. Results
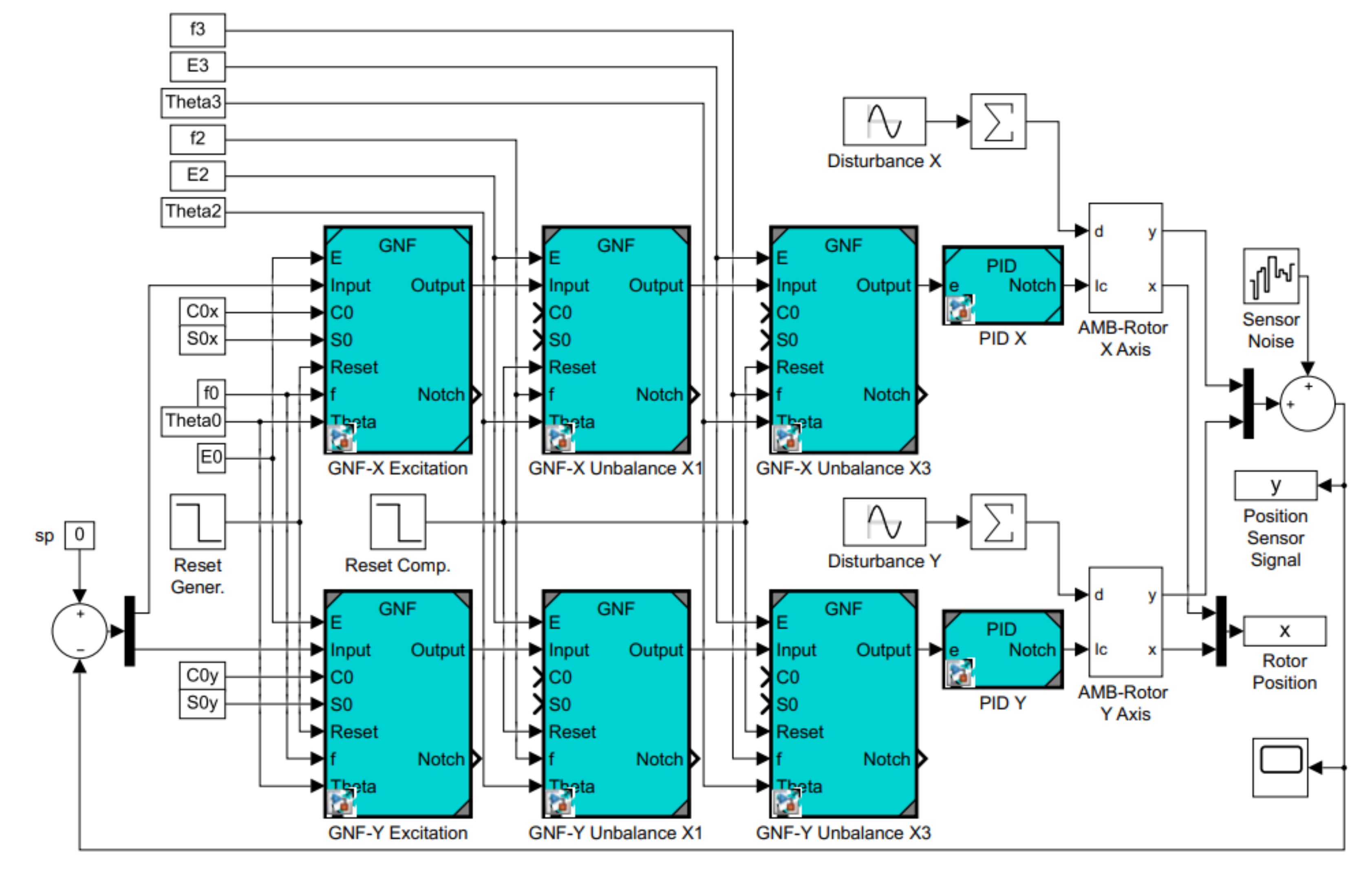
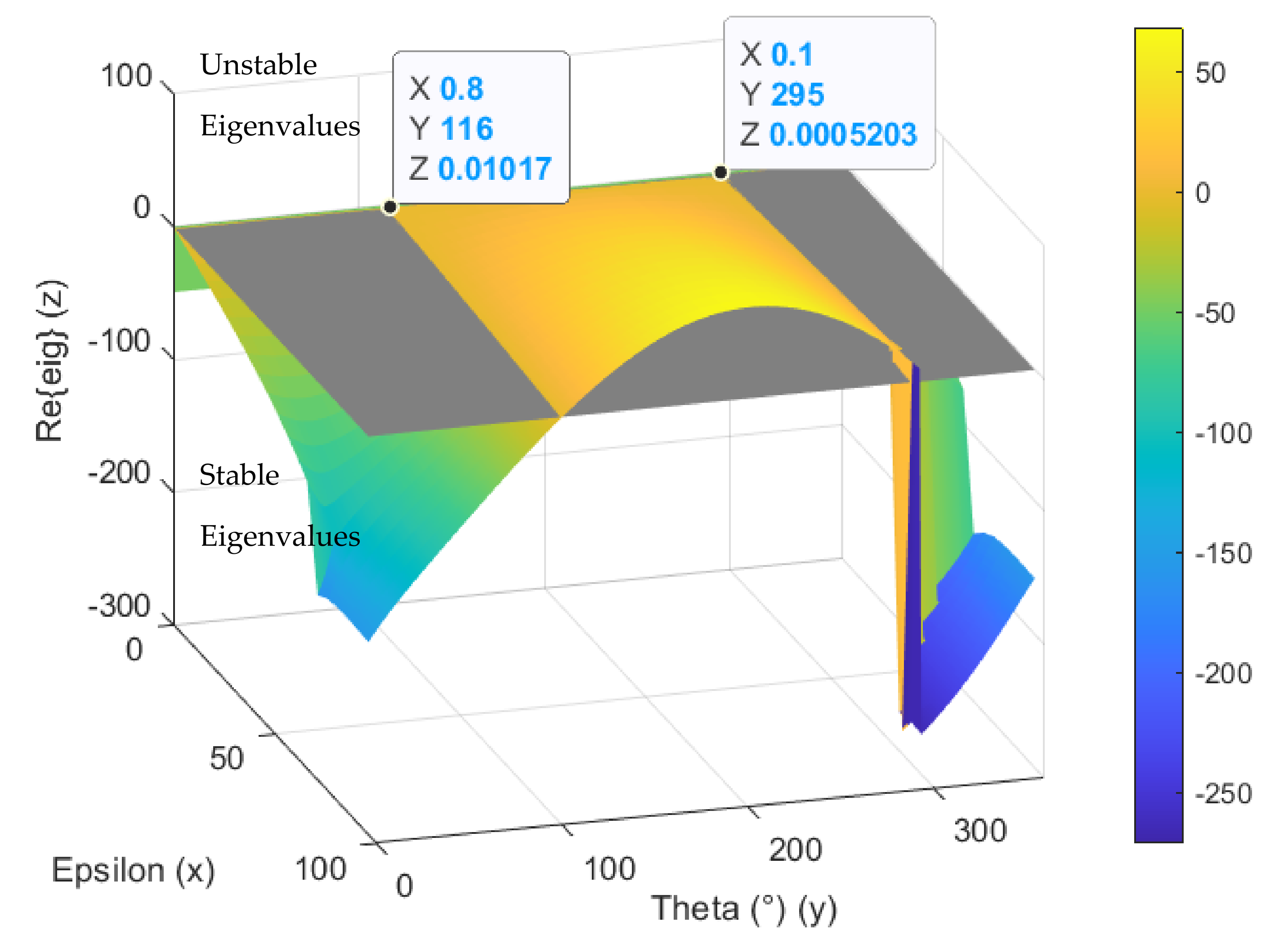
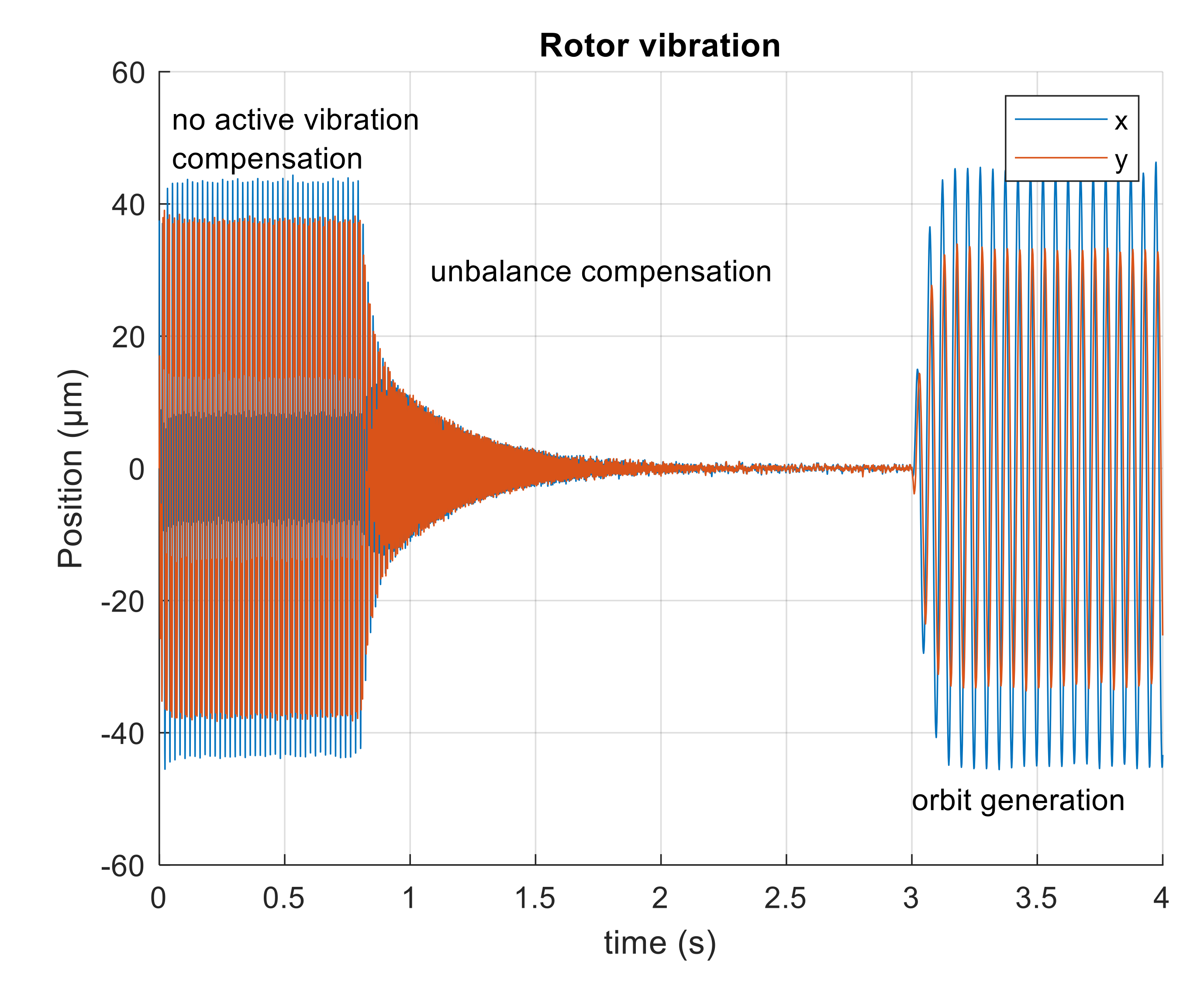
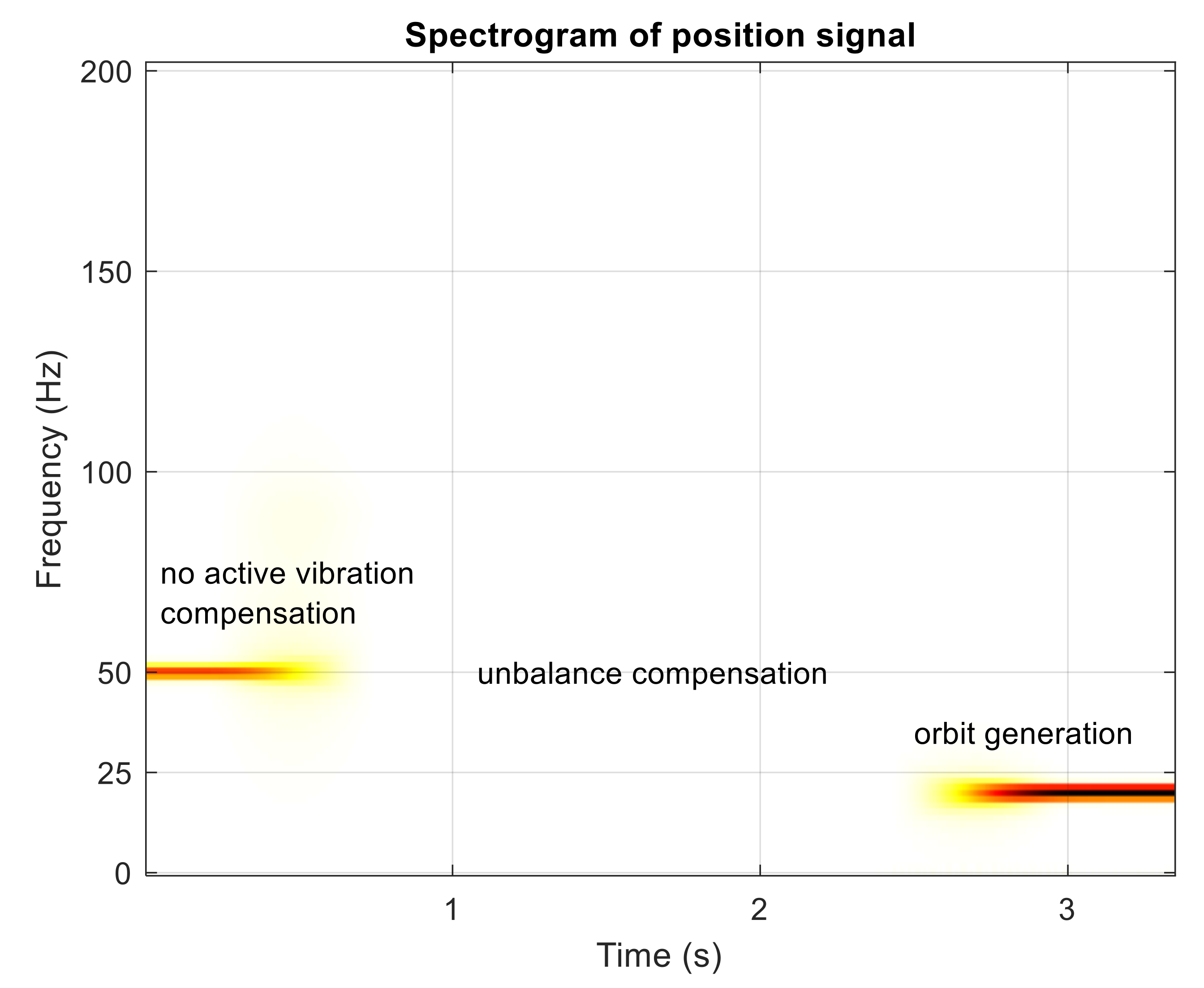
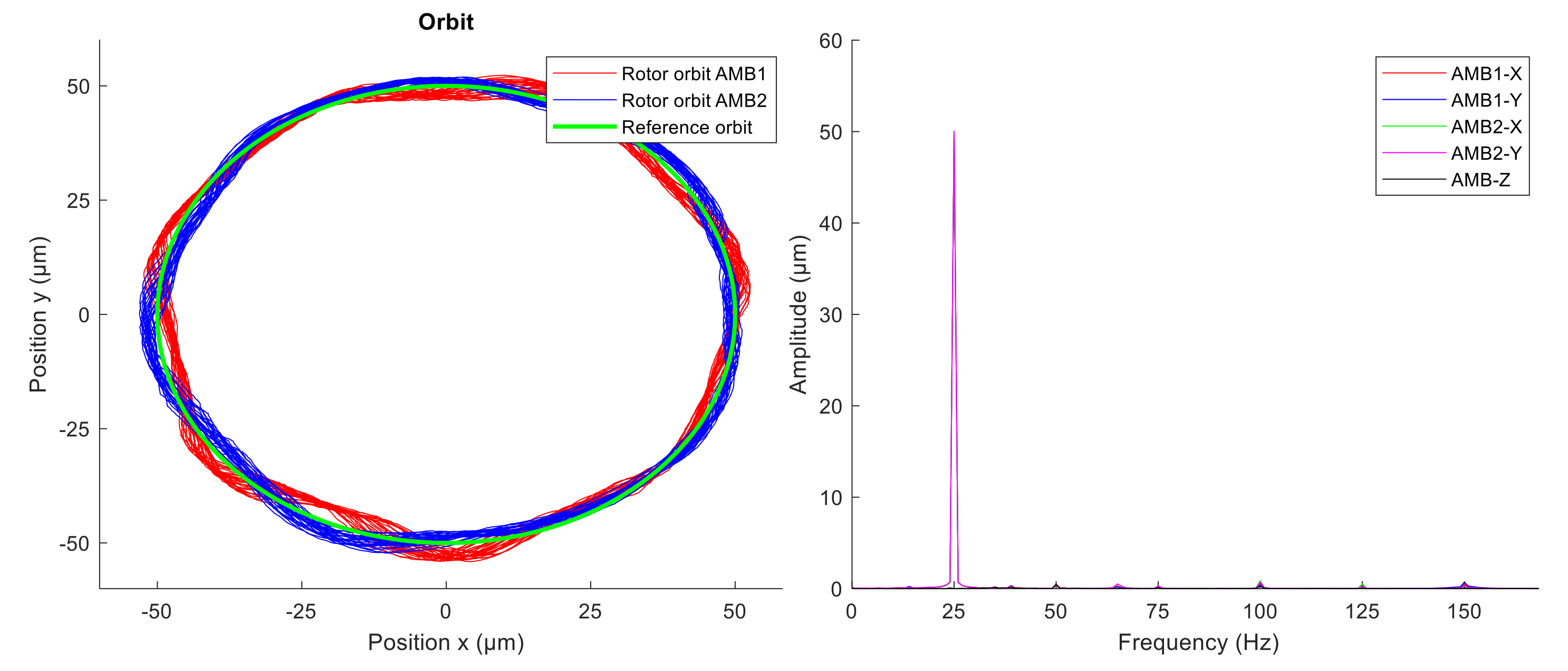
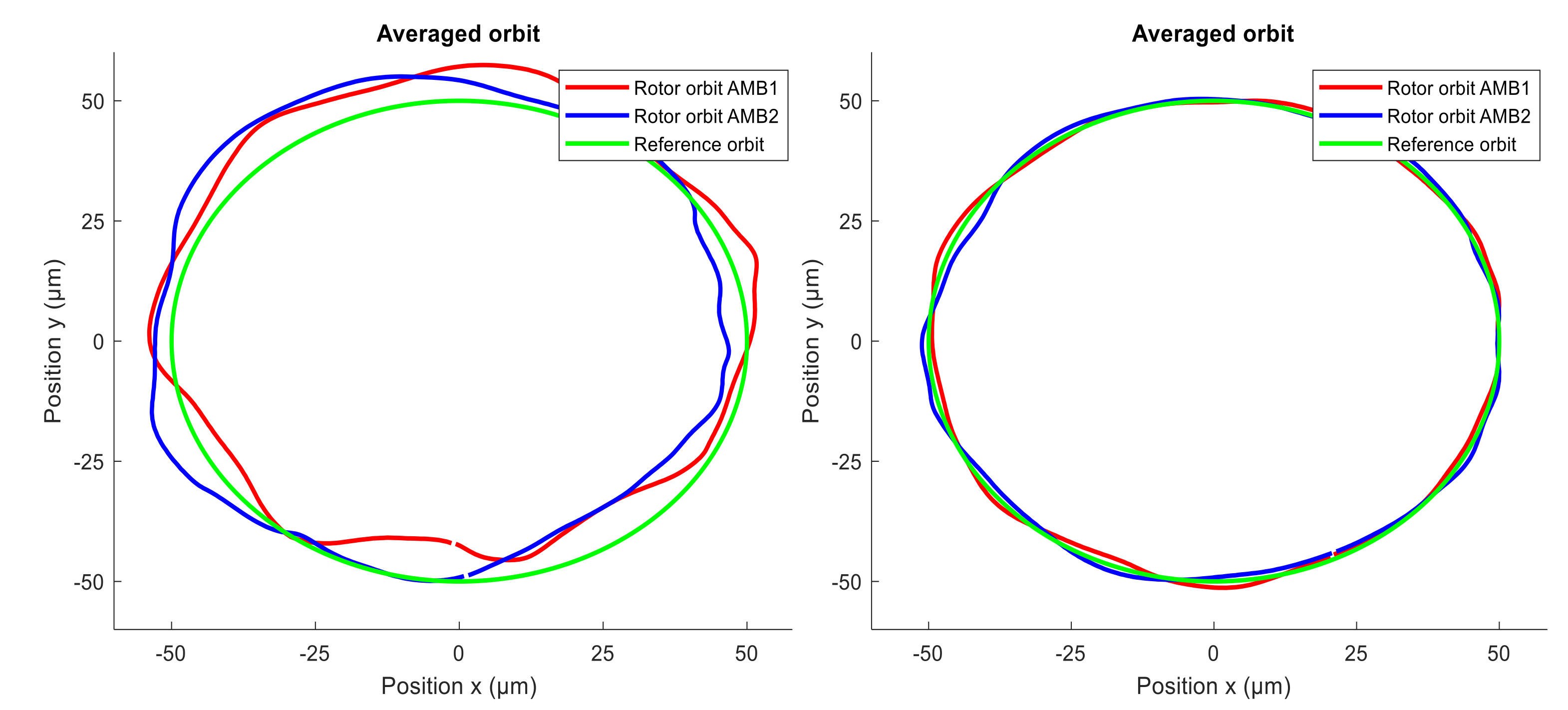
3.1. Simulations
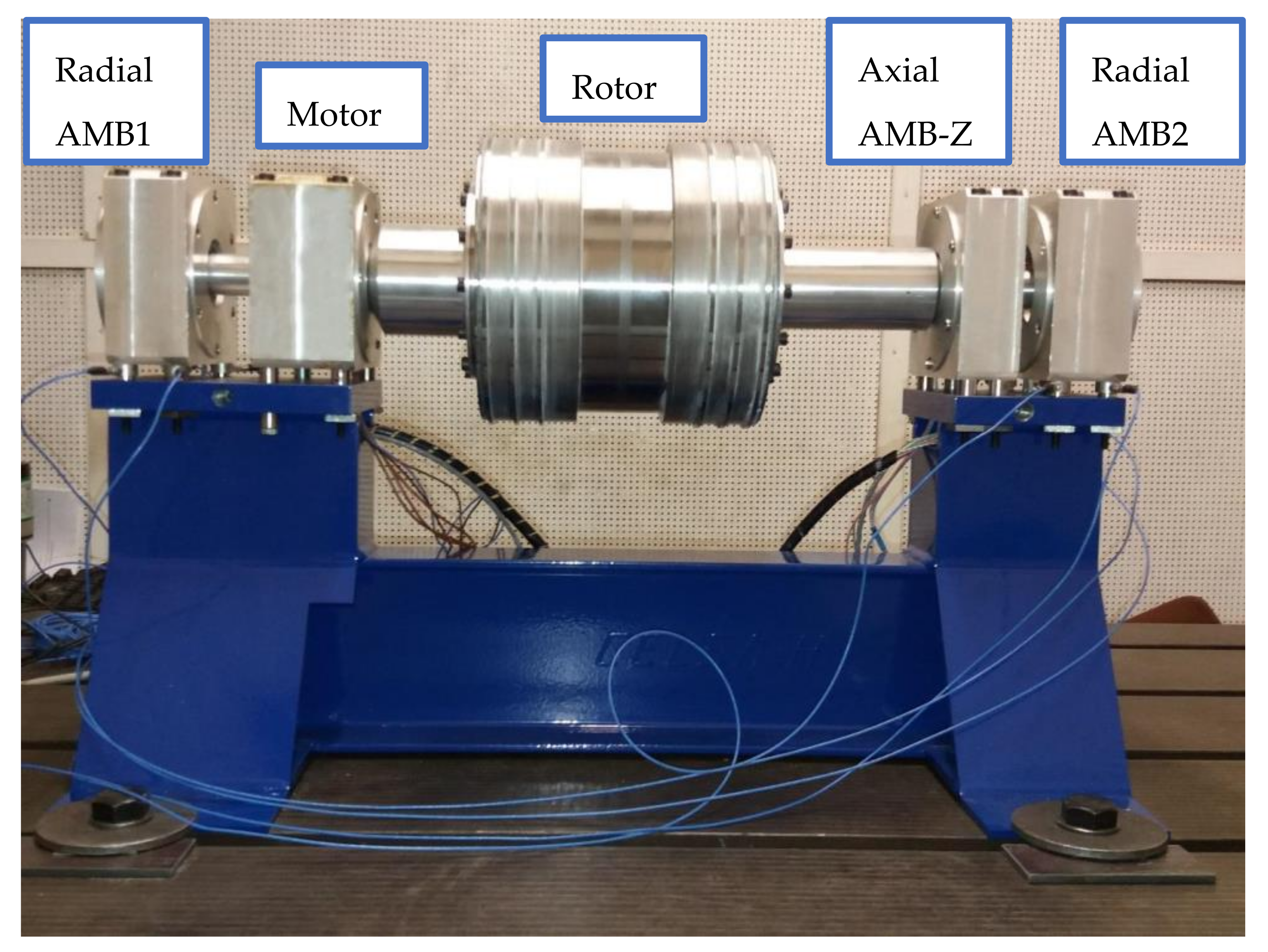
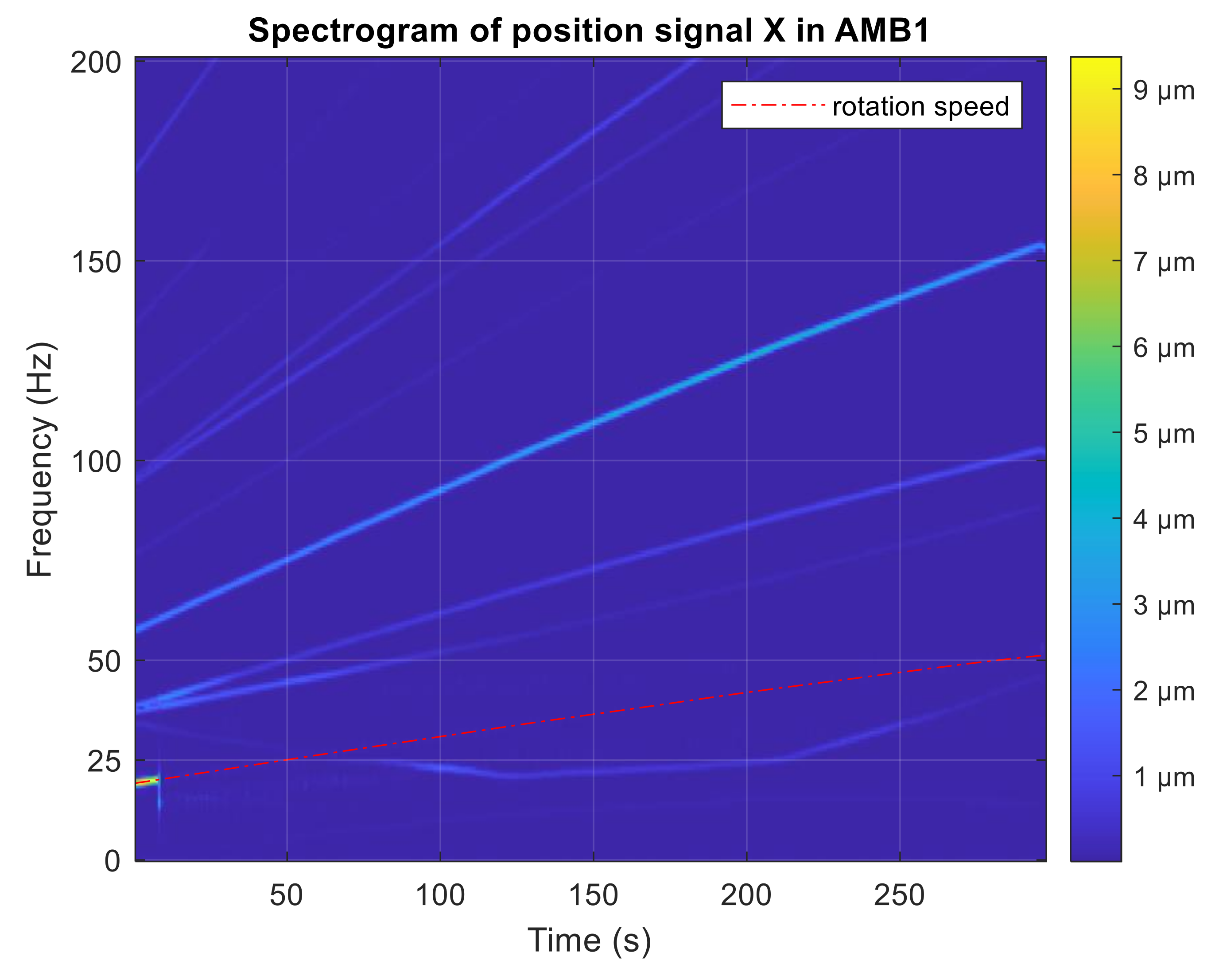
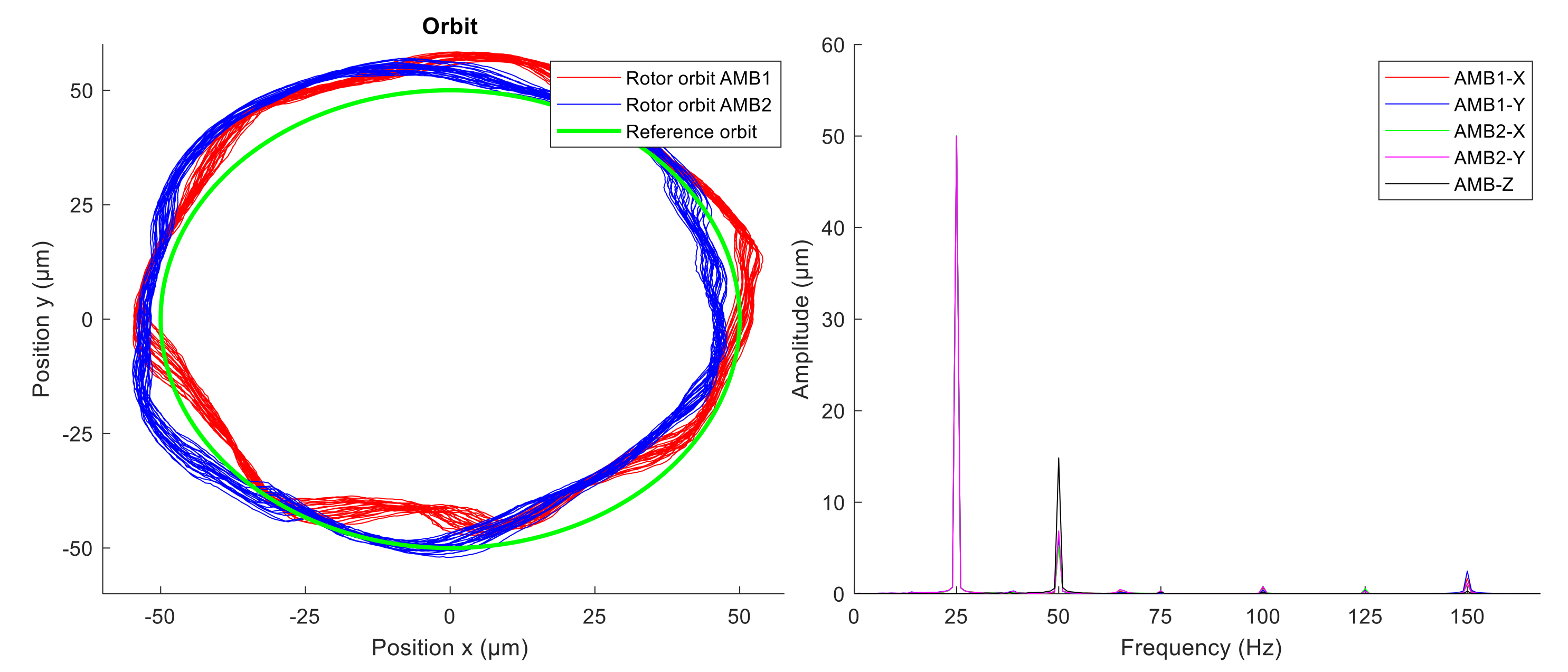
3.2. Experimental Test Rig and Measurement
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Childs, D.W. Turbomachinery Rotordynamics: Phenomena, Modeling and Analysis, 1st ed.; John Wiley & Sons: New York, NY, USA, 1993. [Google Scholar]
- Kocur, J.A.; Nicholas, J.C.; Lee, C.C. Surveying Tilting Pad Journal Bearing And Gas-Labyrinth Seal Coefficients And Their Effect On Rotor Stability. In Proceedings of the 36th Turbomachinery Symposium; Texas A&M University, Turbomachinery Laboratories: Canyon, TX, USA, 2007. [Google Scholar]
- Kalista, K.; Liska, J.; Jakl, J.; Vasicek, V. Identification of seal dynamic force coefficients for turbine rotor monitoring purposes. In Proceedings of the Sixteenth International Conference on Condition Monitoring and Asset Management—CM 2019, Glasgow, UK, 25–27 June 2019. [Google Scholar]
- Wright, D.V. Labyrinth Seal Forces on a Whirling Rotor. ASME Applied Mechanics Division. In Proceedings of a Symposium on Rotor Dynamical Instability; ASME: New York, NY, USA, 1978; pp. 19–31. [Google Scholar]
- Childs, D.W.; Nelson, C.E.; Nicks, C.; Scharrer, J.; Elrod, D.; Hale, K. Theory Versus Experiment for the Rotordynamic Coefficients of Annular Gas Seals: Part 1-Test Facility and Apparatus. ASME J. Tribol. 1986, 108, 426–432. [Google Scholar] [CrossRef] [Green Version]
- Tiwari, R.; Manikandan, S.; Dwivedy, S. A review of the experimental estimation of the rotor dynamic parameters of seals. Shock Vib. Dig. 2005, 37, 261–284. [Google Scholar] [CrossRef]
- Wagner, N.G.; Steff, K.; Schmidt, M. Investigation on the dynamic coefficients of impeller eye labyrinth seals. In Proceedings of the 38th Turbomachinery Symposium, Houston, TX, USA, 14–17 September 2009. [Google Scholar]
- Vannini, G.; Cioncolini, S.; Calicchio, V.; Tedone, F. Development of a High Pressure Rotordynamic Test Rig for Centrifugal Compressors Internal Seals Characterization. In Proceedings of the 40th Turbomachinery Symposium, Houston, TX, USA, 12–15 September 2011; pp. 46–59. [Google Scholar]
- Kwanka, K. Rotordynamic Coefficients of Short Labyrinth Gas Seals—General Dependency on Geometric and Physical Parameters. Tribol. Trans. 2007, 50, 558–563. [Google Scholar] [CrossRef]
- Herzog, R.; Buhler, P.; Gahler, C.; Larsonneur, R. Unbalance compensation using generalized notch filters in the multivariable feedback of magnetic bearings. IEEE Trans. Control Syst. Technol. 1996, 4, 580–586. [Google Scholar] [CrossRef]
- Hutterer, M.; Schrcödl, M. Unbalance compensation of a magnetically levitated rotor for the whole operating range. IEEE Int. Conf. Mechatron. 2017, 226–231. [Google Scholar] [CrossRef]
- Tang, J.; Liu, B.; Fang, J.; Ge, S. Suppression of vibration caused by residual unbalance of rotor for magnetically suspended flywheel. J. Vib. Control 2013, 19, 1962–1979. [Google Scholar] [CrossRef]
- Liu, Y.; Ming, S.; Zhao, S.; Han, J.; Ma, Y. Research on Automatic Balance Control of Active Magnetic Bearing-Rigid Rotor System. Shock Vib. 2019. [Google Scholar] [CrossRef]
- Li, L.; Shinshi, T.; Iijima, C.; Zhang, X.; Shimokohbe, A. Compensation of rotor imbalance for precision rotation of a planar magnetic bearing rotor. Precis. Eng. 2003, 27, 140–150. [Google Scholar] [CrossRef]
- Schweitzer, G.; Maslen, E.H. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| Rotor mass | |
| Current stiffness | |
| Position stiffness | |
| Power amplifier gain | |
| Power amplifier time constant | |
| Position sensor gain | |
| Position sensor time constant | |
| Bias current | |
| Maximal force | |
| Control loop sampling rate | |
| PID proportional gain | |
| PID integral gain | |
| PID derivative grain | |
| PID derivative filter time constant |
| Parameter | Value |
|---|---|
| Disturbance frequencies | |
| Disturbance amplitudes | |
| Noise power | 1 × 10−7 |
| Excitation frequency | |
| Ellipse semi-axis | |
| Ellipse rotation angle | |
| Theta 0,1,3 () | |
| E 0,1,3 () | 0.002 |
| Name | Average Error (µm) | Improvement (%) | ||
|---|---|---|---|---|
| AMB1 | AMB2 | AMB1 | AMB2 | |
| Experiment without AVC | 3.79 | 3.87 | - | - |
| Experiment with AVC | 1.35 | 1.03 | 81 | 85 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalista, K.; Liska, J.; Jakl, J. A Vibration Sensor-Based Method for Generating the Precise Rotor Orbit Shape with General Notch Filter Method for New Rotor Seal Design Testing and Diagnostics. Sensors 2021, 21, 5249. https://doi.org/10.3390/s21155249
Kalista K, Liska J, Jakl J. A Vibration Sensor-Based Method for Generating the Precise Rotor Orbit Shape with General Notch Filter Method for New Rotor Seal Design Testing and Diagnostics. Sensors. 2021; 21(15):5249. https://doi.org/10.3390/s21155249
Chicago/Turabian StyleKalista, Karel, Jindrich Liska, and Jan Jakl. 2021. "A Vibration Sensor-Based Method for Generating the Precise Rotor Orbit Shape with General Notch Filter Method for New Rotor Seal Design Testing and Diagnostics" Sensors 21, no. 15: 5249. https://doi.org/10.3390/s21155249
APA StyleKalista, K., Liska, J., & Jakl, J. (2021). A Vibration Sensor-Based Method for Generating the Precise Rotor Orbit Shape with General Notch Filter Method for New Rotor Seal Design Testing and Diagnostics. Sensors, 21(15), 5249. https://doi.org/10.3390/s21155249