1. Introduction
Several technical devices have been designed to assist people with communication-related disabilities. Such solutions must be specifically selected for each user, according to their motor skills. In general, they emulate the use of typical human–computer interaction (HCI) devices, such as keyboards or mouse pointers.
In comparison, a mechanical keyboard produces a higher information transfer rate than a mouse pointer; however, it needs a larger number of user commands. In its minimal configuration, a mouse only needs five control commands: to make the pointer move in four directions (upward, leftward, and so on) and to generate a left click for the selection. By controlling a mouse pointer, many computer applications can be managed—in particular, the virtual keyboards that most operating systems have in their accessibility options, which allow for typing. Some authors have proposed the control of mouse movements on a screen through ankle flexion [
1] or with head movements. The authors in [
2,
3] used a webcam to track the head movement and several significant features in the face, such as the nose, whose position in the video was mapped into a cursor location on the screen. In this context, clicking can be accomplished by keeping the cursor still over the target for a certain duration (dwell time), or through the detection of some facial gestures, such as a smile, long blinks, winks, and so on. Alternatively, in [
4], the authors proposed the use of a gyroscope placed on the head to control mouse movements, along with a consumer-grade electro-encephalography (EEG) headset for blink detection to emulate a mouse click.
Some people with severe disabilities are confined to a state in which it is not possible to accurately move their head or flex their ankle. For example, in advanced stages of diseases such as amyotrophic lateral sclerosis (ALS), people find it difficult to make the simplest movement, apart from controlling their eye movements [
5] or blinking. Systems such as eye-tracker interfaces (ETIs) and brain–computer interfaces (BCIs) are suitable solutions for such people, as they do not need to have precise control over their eye muscles. Detecting blinking to generate a binary on/off output signal, in combination with an application that sequentially scans different ideograms/elements, may be enough for disabled people to access a computer. In fact, some authors have combined blinking detection with the scanning of different options, in order to move a mouse pointer on screen [
6,
7] and make a click, depending on winks or the duration of voluntary blinks.
1.1. Eye-Tracker Interface (ETI)
Many ETIs are based on the reflection of an infrared (IR) light on the surface of the eye. A camera tracks the pupil and the shiny IR spot in the eye. The relative position between them serves to determine the eye gaze—and then the cursor position—after an initial calibration process. The main drawback of this technology is the cost [
8] and the so-called Midas touch effect [
9], which consists of the random selection of an icon on the computer screen followed by the user’s gaze. Several low-cost and open-source solutions have emerged for eye tracking, with positioning accuracy similar to their proprietary counterparts [
10]. For others, based on the use of only a webcam, the accuracy obtained is similar to that obtained by IR devices [
11]. However, it is very difficult to set up such solutions and there is often no technical support.
1.2. Brain–Computer Interface (BCI)
There are several BCI modalities, depending on how the brain activity is measured, the type of information extracted, and the nature of the stimuli, including motor imagery (MI), steady state visual potential (SSVEP), and P300, among others. SSVEP requires several external visual stimuli, flickering at different frequencies. In [
12], the flickering elements are shown around the cursor, making it easier to follow the cursor and not to lose focus. A variant is the so-called code-modulated visual evoked potential (c-VEP) [
13], which uses a pseudo-random code to modulate the visual stimuli (not the frequency). The same authors have designed software to control any Windows application through a keyboard and mouse. To do so, they used 32 targets assigned with a 63-bit binary sequence with low auto-correlation, as each target used a circular-shifted sequence.
In another BCI modality, P300, the stimulus can be visual, auditory, or tactile, and is associated with an internal mental task that the subject has to perform (i.e., to mentally count) after an unlikely event occurs (i.e., a flash on an ideogram). Based on this paradigm, [
14] proposed to control a mouse by displaying four randomly flashing squares on the screen, in order to represent the four directions of movement. Attention toward the flashes on one square by the user indicates the direction in which the cursor should move. Recently, it has been demonstrated that a P300 mouse emulation device can provide a promising alternative to a head mouse [
15].
In motor imagery (MI), the BCI system is designed based on recognition of the EEG patterns generated when subjects imagine motion. The typical responses to such imaginary motion are event-related synchronization/desynchronization (ERS/ERD) [
16]. A first approach to performing 1D cursor movements has been developed in [
17,
18]. People with or without motor disabilities can learn to control the amplitude of the alpha or beta rhythm and imagine limb movements [
19] for positioning, or imagine keeping still for a while or clenching the hands in order to click [
20], and so on.
Other BCI modalities include pattern recognition during mental tasks—for example, to compose several letters in the mind, the detection of which achieved an accuracy of 95% [
21] and was applied to steer a wheelchair. In [
22], the authors proposed the use of Dasher [
23] with Emotiv. Subjects were trained to think of moving the cursor up, down, or being still. The exact algorithm used to convert such EEG signals into events is unknown, as the authors used proprietary functions offered by the Emotiv SDK.
The main drawback of BCI technology is the cost of the equipment used to capture the EEG signals, the training time for some BCI modalities, and the technical knowledge needed by the caregivers to set up the system.
1.3. Hybrid or Mixed Modalities
Studies have shown different ways to control a cursor on a screen, based on simultaneously including various BCI modalities. For example, in [
24], the authors combined motor imagery and P300 to control vertical and horizontal movements, respectively. To support the P300 paradigm, the application used several flashing buttons placed at the computer borders, showing the direction of the movement. The same authors also studied the effect of substituting P300 with the SSVEP paradigm. For the selection action, the user must focus on a specific button and not think of moving their arms. Other authors have used mixed modalities to improve the performance of a single BCI. In [
25,
26], the SSVEP interface was improved by adding measurements related to the attention level or P300 potentials.
There also exist hybrid methods combining BCI with non-BCI technologies. Some studies have used EyeTrackers with BCI [
27]—the former to control the cursor movements and the latter for selection, which allows for avoidance of the Midas effect. For example, in [
28], subjects were trained to imagine wringing out a towel as a selection mechanism, while, in [
29], they increased their concentration level when the cursor was over the target. A scanning procedure, identical to many communication boards, allows users to select the appropriate option. The authors of [
30] have investigated the use of a gaze tracker with an SSVEP, combining probabilistic models for each input to improve the estimation of user intent.
1.4. Blinking as Part of the Cursor Control
Voluntary blinking detection generates an on/off signal that, along with a board that includes the scanning of its elements, thus showing the cursor’s movements and clicking, allows users to steer the pointer on the screen as a joystick [
7]. These voluntary blinks can be distinguished from natural blinking, as they take longer, or when the user closes only one eye (wink).
Blinks are usually considered as artifacts when recording bioelectrical signals, such as EEG. However, some BCI systems have included them as part of the control algorithm. For example, the authors in [
31] proposed a hybrid BCI system combining SSVEP, MI, and blinks to control a quadcopter. Blinking allows for switching between two different navigation modes, while SSVEP and MI allow for moving the quadcopter horizontally or vertically.
The authors of [
32] presented a system that integrates a speller, a web browser, an e-mail client, and a file explorer using EEG and electro-oculography (EOG) signals. The mouse control method combines left-/right-hand motor imagery for horizontal movements of the mouse and blink detection for vertical motion and selection. The latter was accomplished through the scanning of several buttons, containing the actions to perform, placed around the screen.
An EOG-based brain switch has been used to activate/inactivate a P300 speller, when needed [
33], by performing a triple blink. The user could then input sinograms by alternating P300 and double-blink tasks. This method demonstrated higher input rates than the traditional P300 speller.
1.5. Main Goals of This Study
In this paper, we propose the use of a single-electrode low-cost EEG headset, such as NeuroSky Mindwave (NM), to control a mouse pointer without the need for using any intermediate scanning application to make it move.
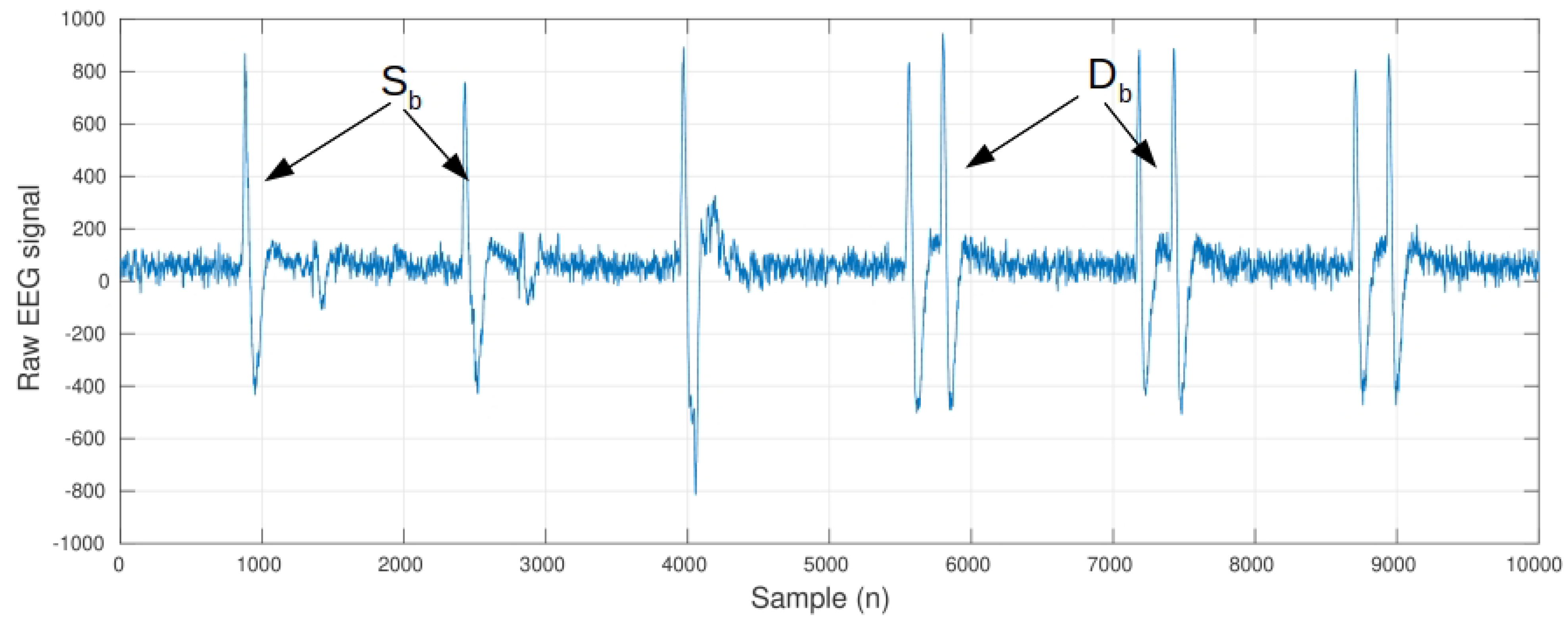
The position of the electrode, Fp1, allows for measurement of the electrical activity associated with both the eye and the left pre-frontal cortex, where some high executive functions—such as selective attention [
34]—are located. The cursor is always in movement, and voluntary blinks are used to select between rotation and linear motion, while the level of attention of the subject regulates its speed.
As will be shown, this approach implies several novelties and advantages over other existing strategies. On one hand, the cursor control algorithm enables a novel, simple, and efficient combination of user attention and voluntary blinks using only one device (a single-channel EEG). On the other hand, this control strategy makes it possible for the user to adequately drive the movement of the cursor, with hardly any training. Finally, the implementation of this strategy in a low-cost system would allow for the use of the system in everyday situations, without expert supervision.
It is also worth noting that, in the end, the opinion of users is the key to accepting a specific technology. This is because other non-technical aspects, such as fatigue, price, frustration, training time, environment, and so on, are also taken into account [
35]. For example, the authors of [
36] demonstrated that a person with locked-in syndrome (LIS) was able to gain control over an EOG, an eye tracker, and an auditory BCI, but the user preferred to keep employing their low-tech communication method, using residual eye movements, due to their proficiency and that of their caregiver. For this reason, we not only investigate the abilities of users in steering the cursor, but also the emotions elicited by the use of this strategy as a measure of its possible acceptance.
Section 2 explains the elements used to build this system and the procedure utilized to control the cursor movement and make selections (mouse clicks). Finally,
Section 3,
Section 4 and
Section 5 present the methodology, results, and discussion, respectively.
4. Results
4.1. Learning Effect on Main Indicators
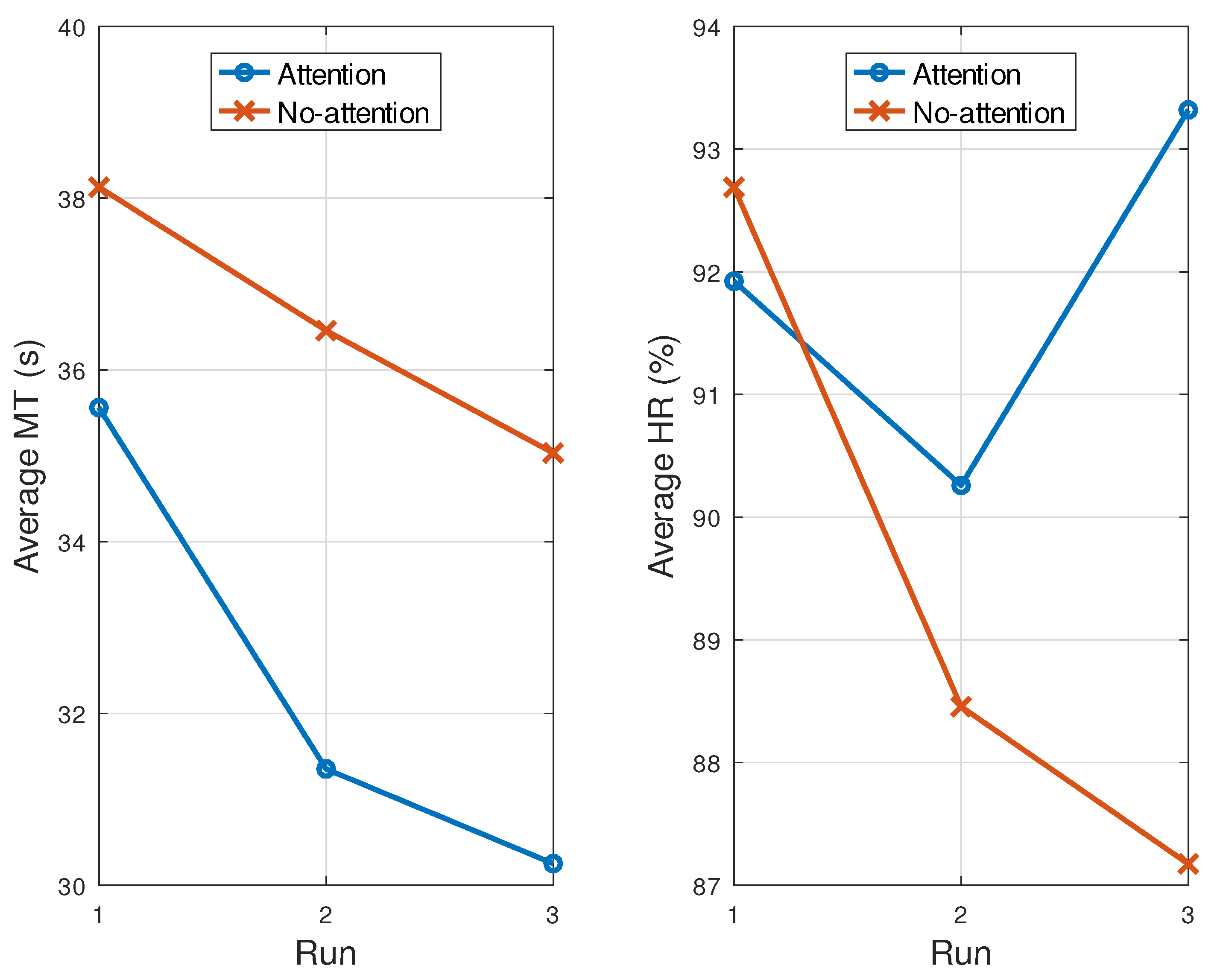
It was expected that participants would improve their skills in controlling the cursor, showing lower MT and higher HR values at the end of the experiment.
Table 3 presents these values for the
and
groups, averaged by trial and run, while
Figure 8 shows the MT and HR grand averages, in order to visualize their tendency over time and, hence, any possible learning effect.
As can be seen, was lower in the last run than in the previous ones for both groups. This trend was significant in , whose slope was statistically different from zero, according to the regression test. This proves the existence of a learning effect (at least, in this group).
The other variable, , showed an unexpected trend in . Instead of having a positive slope, the trend was negative and, so, scored the lowest in the last run. Nevertheless, by analyzing the confidence interval for the slope of the regression line, this tendency was not significant, which allowed us to conclude that there was no learning effect, or that it was not significant. For , the final was the highest in the last run—which was expected—but the trend over time was irregular, decreasing from run 1 to run 2, then increasing from run 2 to run 3. There was no significant tendency either.
We also observed that
increased in each run as the trials progressed (
Table 3). Thus,
was higher at the end of every run (i.e., in trial T4) than at the beginning (i.e., T1). This trend was statistically significant for the
and
groups in two out of the three runs (1 and 3). With regard to
, the last trial obtained a slightly lower rate than the first run, although there was no clear tendency over trials, as confirmed by the statistical analysis. Only for
, in the last run, was there a significant negative trend.
Hereafter, only the data associated with run 3 (i.e., the last run) are processed. This is the usual procedure in studies involving HCI models, in which the initial learning effect is removed from the results and final analysis. Different subscripts are added to and , in order to distinguish the data set used. In this way, the subscripts ‘a’ and ‘’ identify the averages obtained from all trials for the groups and , respectively. Sometimes, the ‘f’ subscript is used to indicate that the averages were obtained with data from trial T1 (the fastest), in order to show the best performances that the proposed approach can hypothetically achieve. As an illustration, represents the average of MT for T1 in run 3 for , while is the mean for all trials in run 3 for .
4.2. Index of Performance (IP) and Throughput (T)
Fitts’ model establishes a linear relationship between
and the ID, in which the index of performance (IP) represents the inverse of its slope. We obtained four different models overall, covering the two groups (Attention and No-Attention) and two conditions (fast and averaged).
Table 4 shows the MT for
(
,
) on the averaged and fast conditions, indexed by ID and their counterpart results (
,
) for
.
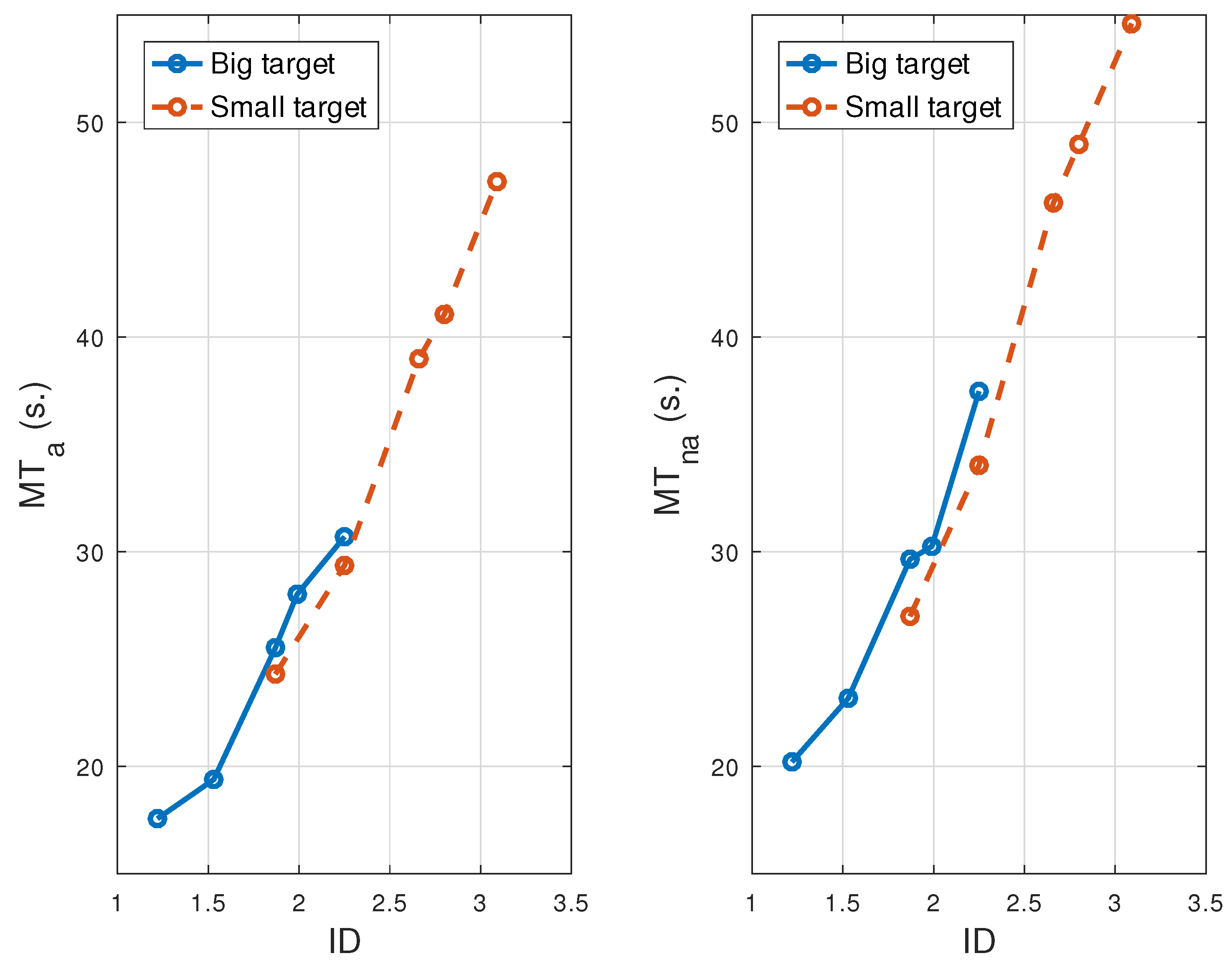
Figure 9 shows plots for
and
. Results associated with large and small targets are plotted in different colors, in order to distinguish the ID interval in which they lie. However, all IDs were used for the estimation of the index of performance (IP). As expected,
increased for both groups as the ID increased. This increase was significant, according to the regression test and Kruskal–Wallis test (KW), in both groups and conditions (
p < 0.001). The KW test does not require any previous data requirements, such as normality or homoscedasticity, and can be used for an unbalanced number of subjects among groups.
Table 5 presents the values for the index of performance (IP) and throughput (T). For the latter parameter, it was necessary to previously apply the Weldford correction, in order to adjust the target sizes and distances to experimental data and, with them, the effective index of difficulty (
) (Equation (
9)), which is included in Equation (
8) for computing T.
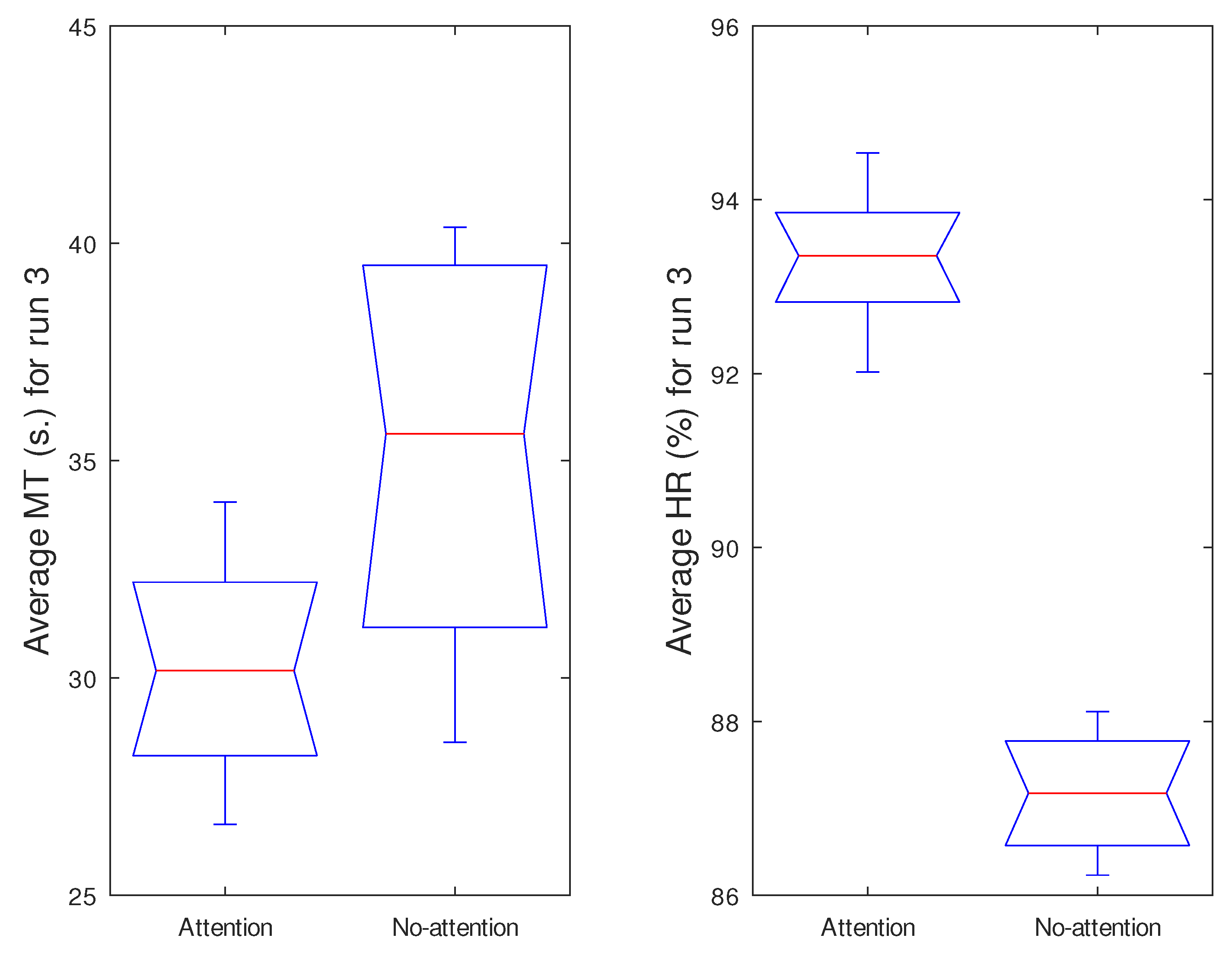
One research goal was to determine whether the use of the attention level as a control variable had a significant effect on the cursor movement time and hit rate.
Figure 10 shows the boxplots containing the
and
values for all trials and both groups. As can be seen, the Attention group obtained better MT and HR values: lower movement times and higher hit rates. This was also verified statistically, by using the KW, which resulted in
and
for MT and HR, respectively. This means that the use of attention is a key determinant in obtaining better results in this HCI proposal.
4.3. Differences between Groups
To look into the reasons that caused these differences, the target size was included in the following within- and between-group comparisons.
Table 6 includes the HR data indexed by ID and condition, as
Table 4 does for MT. Both tables contain relevant information for the analysis. Additionally,
Table 7 includes the
p-values obtained after comparing different situations.
As expected, the target size influenced the MT differences within each group in both the fast and averaged conditions (p < 0.001). However, when comparing the MT obtained using only big targets between both groups, there were no significant differences, regardless of the condition (fast or averaged). There were only significant differences in MT for small targets (p < 0.01) in the averaged condition. Therefore, with small targets, the MT was higher in general; however, when compared along with the attention, it influenced the MT differences between groups only for the averaged condition, not for the fast one.
Regarding HR, there were no significant differences within groups in any condition. We only found differences in the averaged condition between groups for big and small targets (p < 0.05 and p < 0.01, respectively). Therefore, the target size did not influence HR, regardless of the condition (i.e., fast or averaged). The use of attention as a means of controlling the cursor speed was the key factor, in the averaged condition, that led to the worse results for HR in the group.
4.4. Metrics Related to the Trajectory
In this section, we detail the analysis of some factors related to the trajectory, such as normalized effective distance (NED), movement variability (MV), movement error (ME), and movement offset (MO), described in [
57] and reproduced in
Section 3.3.
As expected, the NED was higher than the ideal result—that is, close to 1.2 on average—for both groups, which means that the real path was 20% longer than the optimal one (
Table 8). Interestingly, this parameter decreased as ID increased (
p < 0.001;
Table 9), indicating that the participants were less accurate in selecting the initial cursor direction when the target size was large or close. In fact, for big targets, the NED obtained significantly higher values than for small targets, regardless of the group (
p < 0.001). Here, the attention group obtained slightly better results (
p < 0.05), which could be mainly explained by the differences obtained between big targets (
p < 0.05).
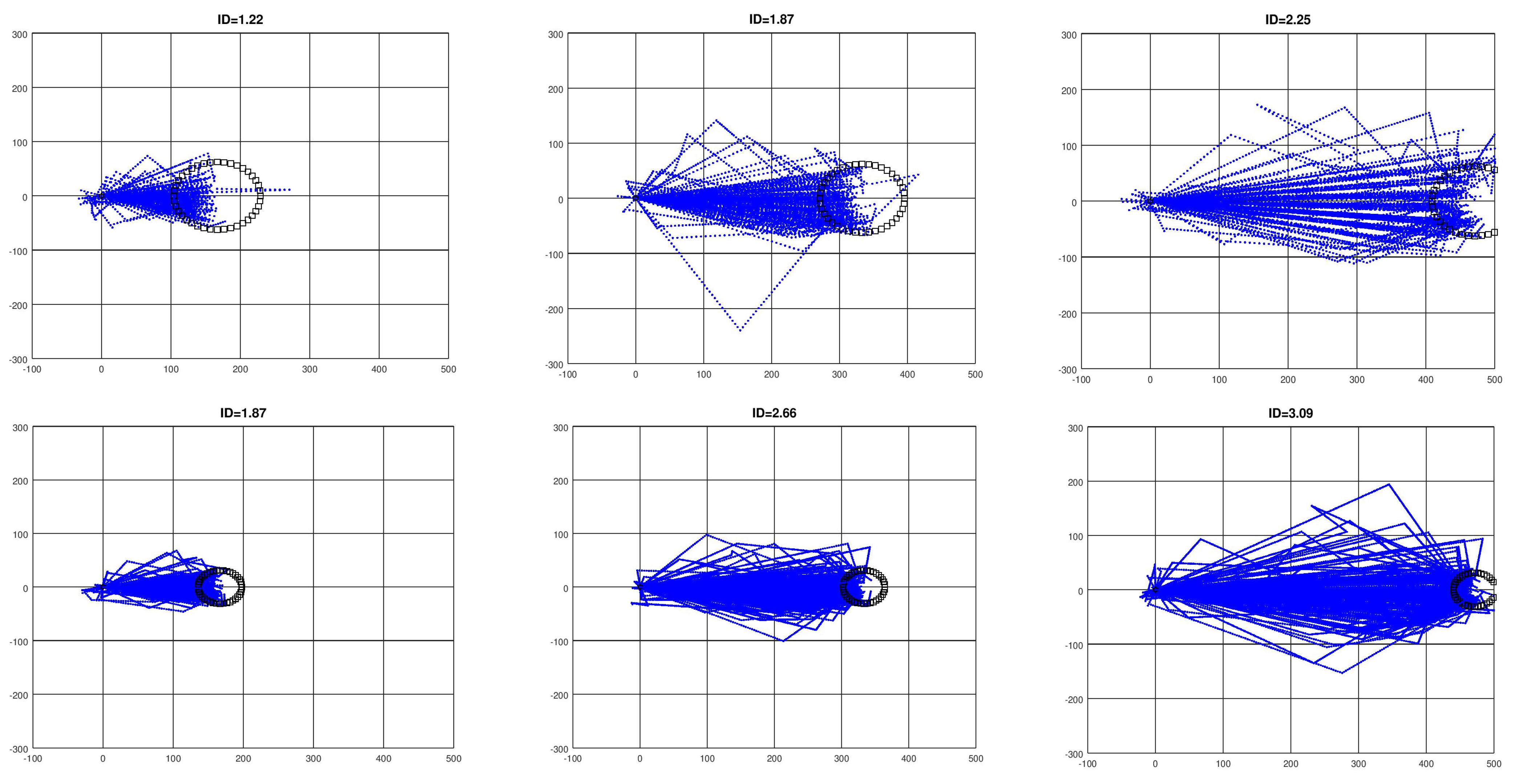
Figure 11 shows the cloud of trajectories for all participants, target sizes, and for high, low, and medium index of difficulty (ID) values. To make this possible, as the targets appeared sparsely on the computer during the experiment, the real cursor trajectories are projected over the optimal path, which is the line that joins the cursor’s initial position with the center of the target. In this new representation, such a line is placed horizontally onto the
x-axis and, consequently, the starting cursor position is moved to the origin of the coordinates. Outliers were not removed from the trajectories, in order to show a complete picture of the experimental results.
As reaching the target involves first selecting the angle at which the cursor leaves the rotation state to initiate its linear movement, it is expected that the real trajectory moves away from the optimal path as the cursor comes closer and closer to the target. As can be seen in
Figure 11, these paths drew a kind of cone, with the vertex placed at the cursor’s initial position. This influenced the NED and led to MV and ME having values which indicate that the trajectory diverged from the optimal one by some number of pixels.
Both MV and ME increased as ID did for each target size (
p < 0.001;
Table 9), and the differences were significant when comparing the
and
groups. This was, again, due to the differences found between the two groups with the big targets. A possible explanation of this lies in the fact that, once the target size is fixed, the ID increases as the distance does, while the cone aperture angle does not decrease sufficiently, so the real trajectory maintains similar MV and ME values.
MO showed negative values for all groups and IDs, with the exception of one case. On average, the results indicate that there was a negative bias in all trajectories, as can be observed in
Figure 11. This means that, in general, there was an anticipation effect when selecting the initial angle. Here, no significant differences between groups and target sizes were found. There was only a clear dependence of MO on ID for the
group (
p < 0.01).
4.5. Additional Metrics
We also analyzed other parameters related to the cursor movement and its control: the averaged number of linear segments (
), percentage of time in the rotation state (
), and the number of extra actions (
). In an ideal situation, only two actions are required to lead the cursor to the target. The first one is selecting the appropriate departure angle, which makes the cursor leave the rotation state and start the linear movement; the second action is selecting the target once the cursor is on it. Therefore, in the best scenario, there are only two states (spin and linear), in a percentage that depends on the initial cursor position and the target placement, while NLin and EA must be 1 and 0, respectively.
Table 10 presents the results obtained for both groups.
Similarly to previous sections,
Table 11 provides the
p-values and the significance after comparing the effect of different independent variables on the analyzed metrics. As can be seen, the ID significantly influenced all these variables for both groups (
p < 0.001), and only for
were no significant differences found between the
and
groups for big, small, and all target sizes.
It can be seen, from the grand averages, that the cursor was in the spinning state almost 50% of the time, and that there was an inverse relationship between PRS and ID, which was statistically significant. The latter was expectable, since as the ID increases, the target is placed further away from the initial cursor position and it takes longer for the cursor to reach it. Interestingly, the use of attention did not have any significant influence on the difference (47.6% and 46.9%, respectively) obtained between the two groups on PRS (p > 0.05).
With respect to NLin,
Table 10 shows that, in general, it was necessary to use more than one linear segment (and, consequently, rotation states) to reach the target. The ID, target size, and the attention variable had statistically significant influences on this indicator. Therefore, the
group required more complex trajectories, with more linear segments than the other group (1.79 vs. 1.47); big targets needed less complex trajectories, and, as the ID increased, so did NLin.
EA displayed the same behavior as NLin. In general, subjects had to perform more than one extra action to complete the experiment. For the group, the EA was significantly higher (p < 0.001), and the use of a large target required fewer extra actions than the small ones (p < 0.001) for both groups.
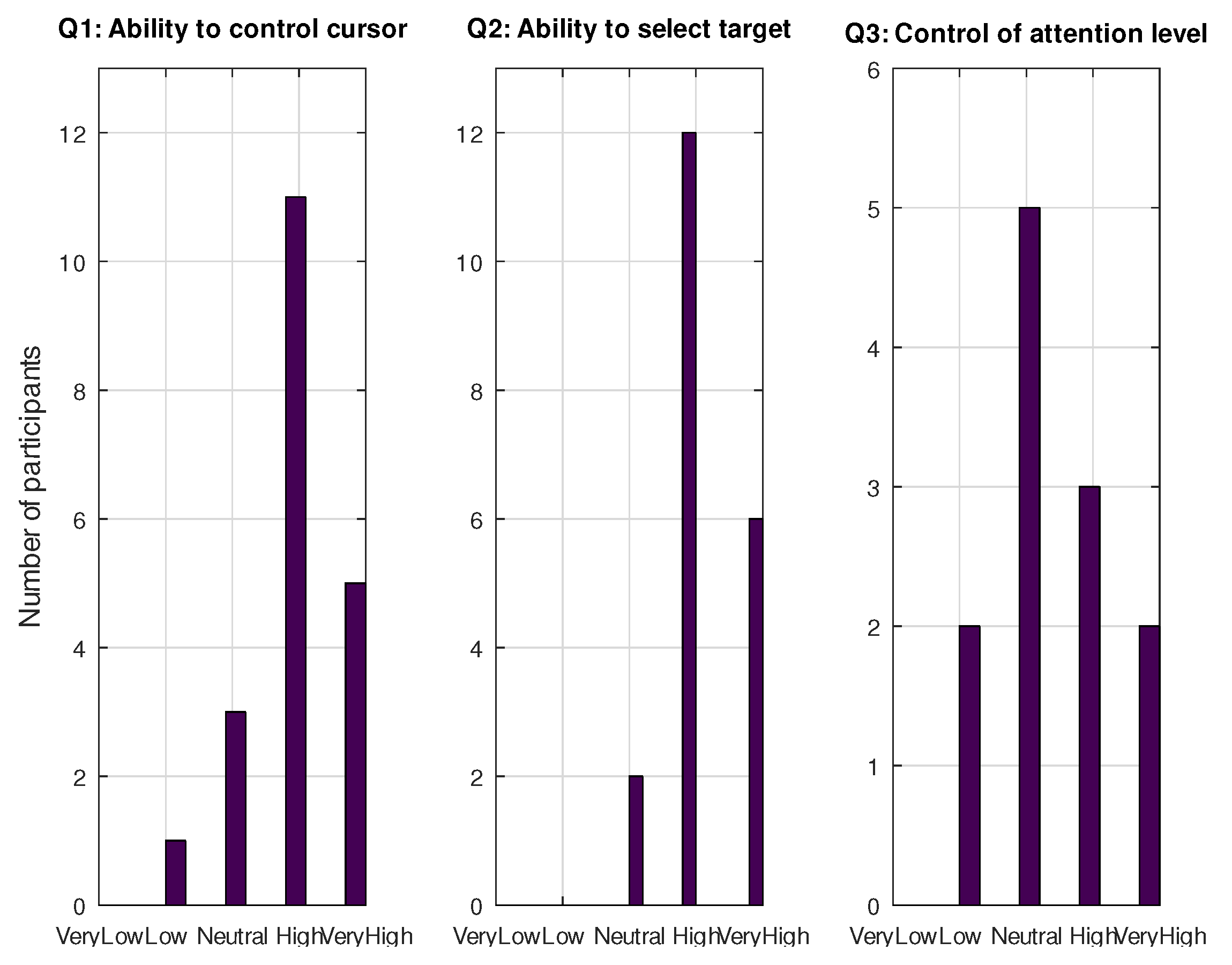
4.6. SAM Test and Survey
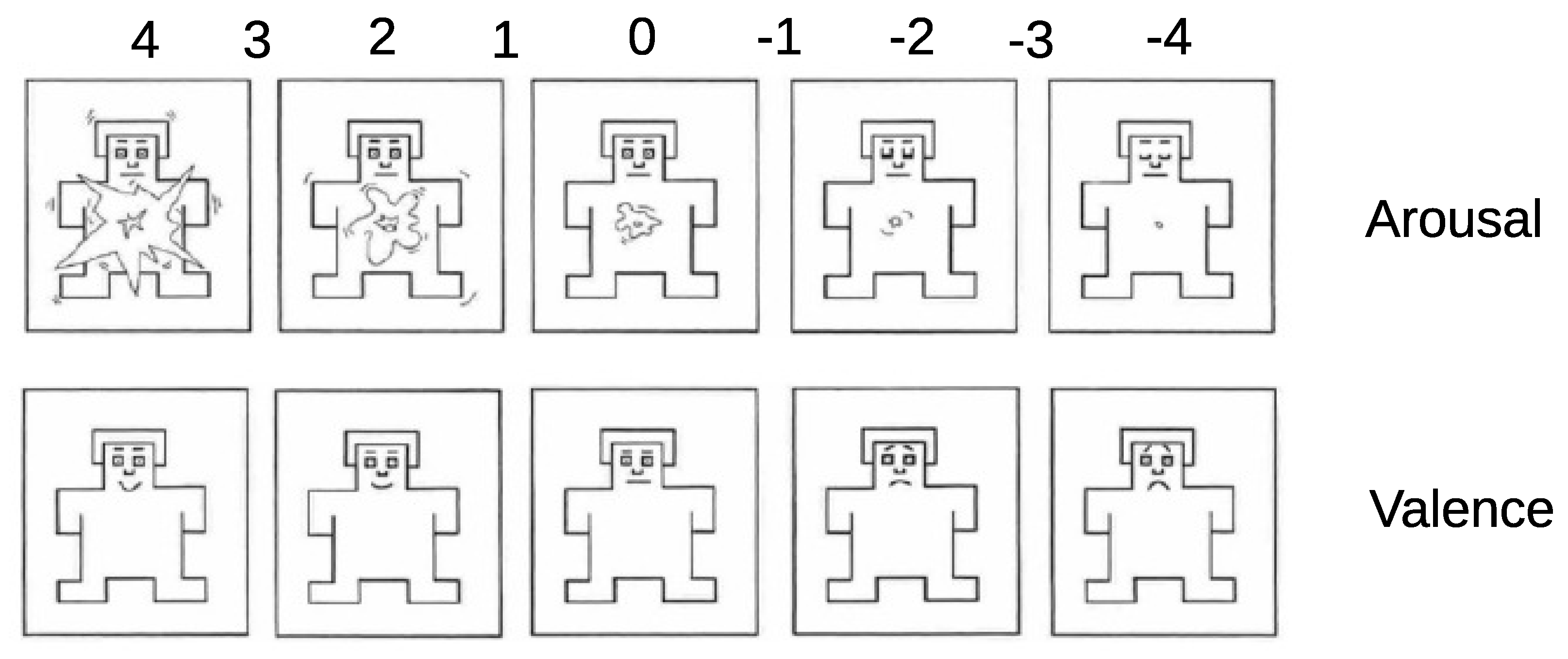
Participants were asked to complete two types of tests. The first one comprised the SAM test, which involved analyzing their emotions during the experiment, and a set of adjectives or comments that the participants were allowed to add to provide a more complete picture of their feelings. The other survey took place at the end of the experiment. It involved a general assessment related to the participants’ ability to control the cursor’s movement (Q1), the selection of the target (Q2), or the attention level (Q3).
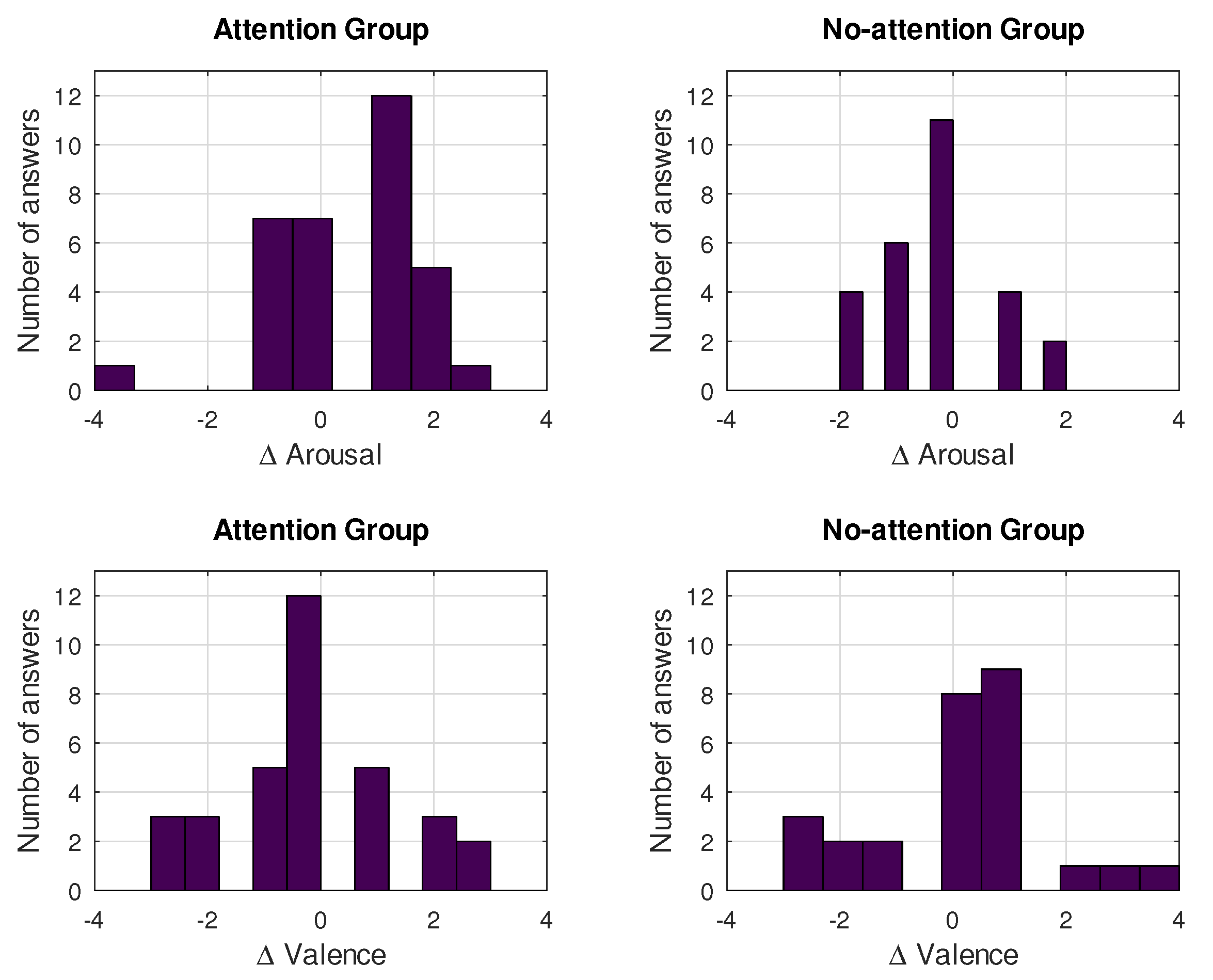
The effect that the use of the proposed method exerted on participants can be quantified by the changes reported in valence and arousal at the end of each run, in relation to those reported at its beginning. This differential (positive or negative) valence and arousal for both groups and all runs is depicted in
Figure 12. Most answers suggest differential arousal and valence greater than or equal to zero for both groups; namely, for differential valence, 66.7% and 74.1% of answers in the
and
group, respectively, were positive or equal to zero. The
group had a higher percentage, but this inter-group difference was not statistically significant (
p = 0.5). Following the same procedure for differential arousal, the respective percentages were 75.8% (
group) and 63% (
group); however, it was found that the difference between groups was significant (
p < 0.05), thus suggesting an effect of the use of attention, leading to an increase in arousal.
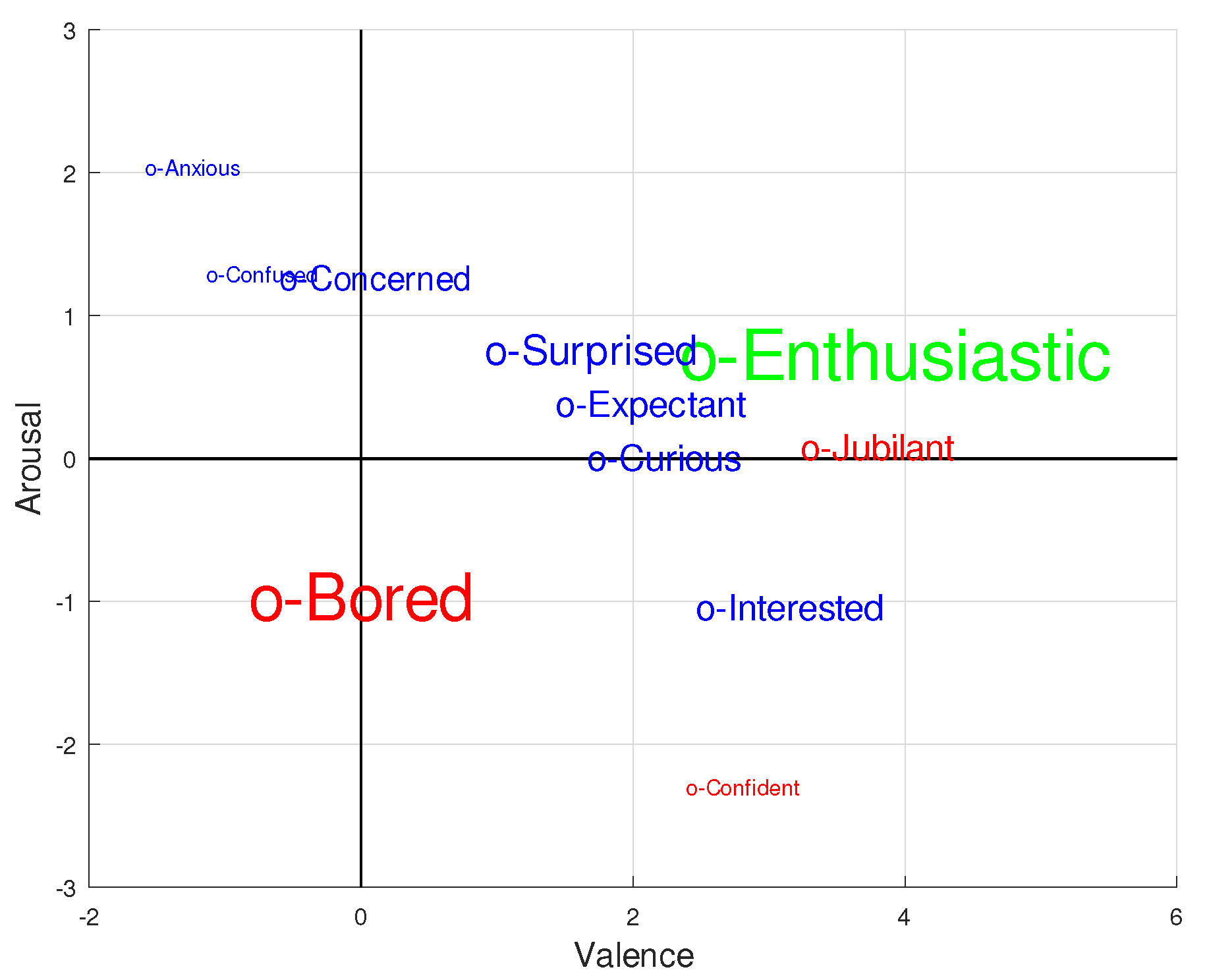
Figure 13 shows information collected from the SAM test and translated into emotional words, thanks to [
58]—a study that contains a comprehensive list of these emotional words, along with their associated valence and arousal values. By using the absolute arousal and valence scores reported at the end of the three runs for the 20 participants, we found the closest words in the aforementioned list and then constructed a word histogram. The font size of the words appearing in
Figure 13 is proportional to their frequency in the histogram. At the same time, with the aim of identifying the group in which a specific word appeared more frequently, three colors were chosen: blue, when a word appeared more times in the
group; red, when it had a higher frequency in the
group; and green, when it was equally likely in both groups. The most frequent word was ’enthusiastic’, which appeared in 23.3% of tests and was equally distributed between the two groups. It was followed by ’bored’ (21.7%), which was more frequent in members belonging to the
group. By far, the largest group of words had frequency close to 8.3%: ‘surprised’, ‘expectant’, ‘curious’, ‘interested’, ‘jubilant’, and ‘concerned’. Excluding ‘jubilant’, which only appeared in the
group, the remaining words were dominant in the
group. Finally, with a residual appearance (1.7%), there were words such as ‘anxious’, ‘confident’, and ‘confused’. All of these results suggest that most participants reflected positively on the experience.
Most participants did not report any additional comment (75%); others reported discomfort generated by the ear clip (5%) of the headset, that their eyes felt dry (10%) when using the system for a long time, or about the frustration they felt when the system did not detect their blinks properly (15%), causing a delay in completing the task.
Figure 14 shows the histograms of the last questionnaire. In general, participants were able to manage the two cursor actions (i.e., movement control and selection). Only one out of the 20 participants (5%) reported that their ability to control the cursor movement was low (Q1), and none of them reported a low or very low capacity in selecting the target (Q2). For those who belonged to the Attention group, only two participants admitted their low capacity for controlling the attention level (16.7%).
5. Discussion
To put our proposed approach into context, typical values of HR, MT, IP, and T, for a variety of input devices, were collected.
Table 12 shows these values, sorted by IP. At the top of the table, we can find devices such as ETIs, stylus, and mouse, with the highest bit rates, whereas the BCI-based systems occupy the bottom part of the list—where our approach is placed, thus improving upon [
19], due to its higher HR and lower MT. There are not many studies that include Fitts’ model of BCI systems for controlling a cursor, which makes it difficult to compare our solution with this technology.
To compare the throughput (T) for different BCI systems, the information transfer rate (ITR) was introduced [
62,
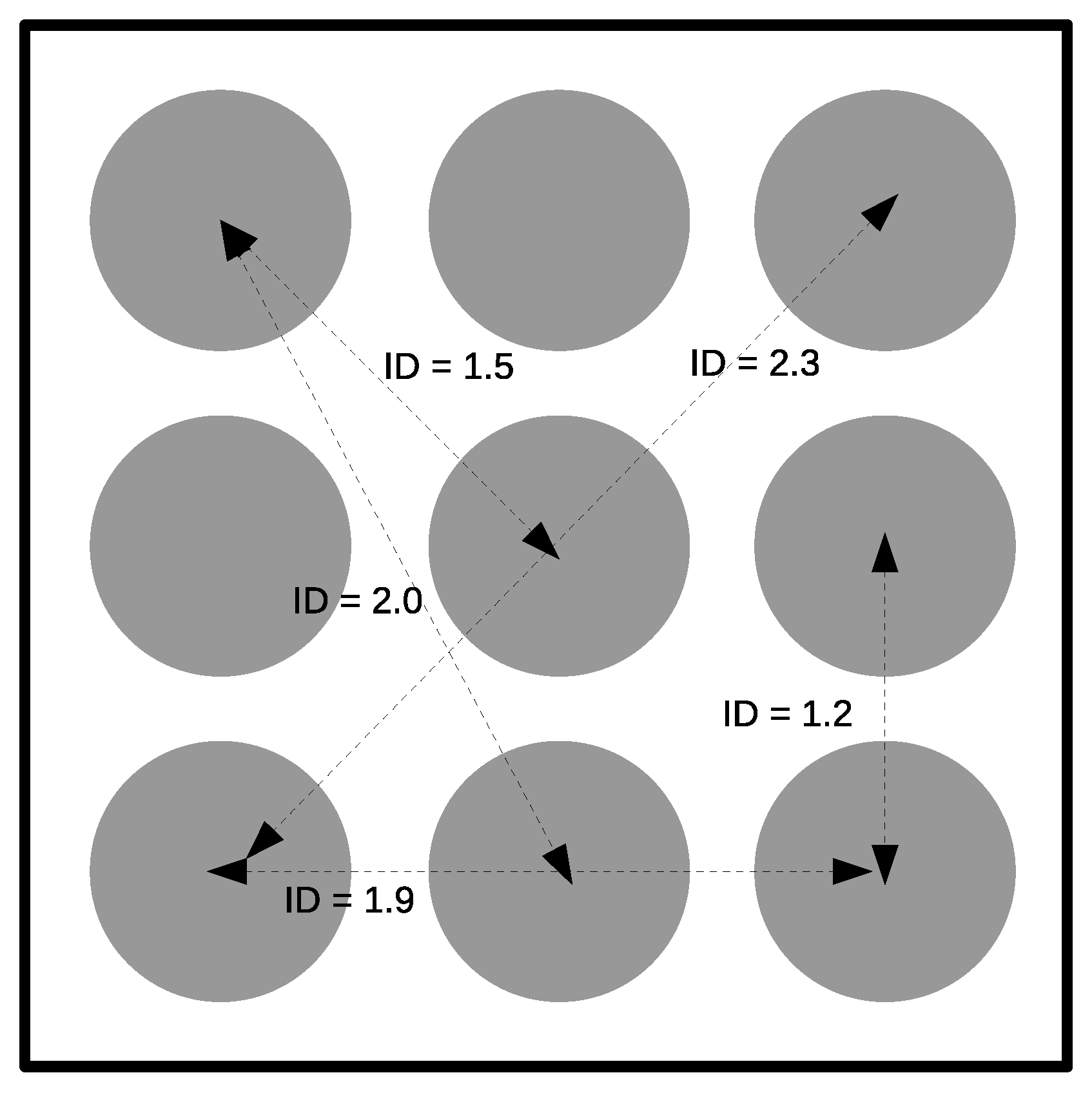
63]. ITR is based on the classic Shannon’s Information Theory. It measures the capacity of a BCI channel in bits/min, which depends on the number of choices, the accuracy of the classifier in detecting them, and the time required to make a classification. In order to extend the comparison with the BCI systems, without adding another experiment, we used the hit rate and movement time obtained previously in the Fitts’ model and a hypothetical communication board, based on a 3 × 3 grid of circle-shaped ideograms (see
Figure 15). The ideograms were placed while obeying the distances shown in
Table 2, and with a diameter fixed to one-fourth of the screen border.
Table 13 contains the values of
and
for every ID. Assuming that all ideograms are equally likely, then the
and
averages can be obtained by weighting their respective
and
by the relative number of all possible trajectories in each ID. Then, the
would act as the probability of selecting one out of
N ideograms, and
is used as the average time in its selection. Therefore, an estimation of
can be given by Equation (
16).
For a communication panel with 3 × 3 elements, such as that shown in (
Figure 15), the ITR is in the range of 2.3–16 bits/min, with 7 bits/min on average. According to [
64], the typical ITR for MI and P300 is 3–35 bits/min and 20–25, respectively. The highest score is achieved by SSVEP, which reaches a bit rate of 60–100 bits/min. Therefore, our proposed approach would be placed within the range of MI and P300 BCI systems.
Analysis of the trajectory showed that that of NED was slightly superior (over 20%) to that of the optimal. This optimal, or ideal path, was assumed to have a length of
(
D is the distance between the initial cursor position and the center of the target of radius,
R). This also requires a perfect departure angle, which allows the cursor to draw a trajectory perpendicular to the target, and the selection must be performed precisely at the target’s border. In order to analyze the behavior of NED for different IDs, a theoretical model was developed. To do so, it was assumed that all possible trajectories that can be followed to successfully reach the target are equally likely. The theoretical model of
depends on
D and
R, according to Equation (
17).
Table 14 compares the results achieved (
Table 11) with the values obtained through Equation (
17). As can be seen, NED diminishes as ID increases. This is a consequence of the fact that longer distances make the ratio closer to 1. For ID greater than 1.9,
and
approached
; for lower values, the experimental result improved upon the theoretical. This means that it was likelier to select trajectories nearer the optimal path for low IDs, considering all the possible trajectories. For high IDs, the set of experimental trajectories matched the theoretical approach reasonably well. This can be explained by the existence of a target ’departure angle’, which is different from the viewing angle that was used in the theoretical model, and which gathers all possible trajectories ending in the target. For low IDs, the viewing angle is greater than the departure angle, which causes
to increase. For ID greater than 2.0, the theoretical estimation and experimental data converged reasonably well. This suggests the existence of a minimum departure angle, which seems difficult to reduce. For the No-Attention group (
) and ID greater than 2.7, the theoretical result was less than the experimental; for the other group, this situation occurred for an ID greater than 3.1. As a direct consequence of this fact, it will be more likely, for high ID, that more extra actions (EA) and linear segments are needed, in order to correct the trajectory (
Table 10).
In [
57], the trajectories of different typical pointing devices, such as mice, trackballs, and so on, were assessed. We replicated their results in
Table 15, along with those obtained by our proposed approach. It can be seen that the performance of the cursor’s guidance was similar to that of common pointing devices.
Another issue, concerning the movement time (MT), is that the cursor spun close to 50% of the total time. Several factors make this percentage important. First, the cursor always spins counterclockwise. Therefore, depending on the target position, it is sometimes necessary to wait for almost a whole turn to select the appropriate departure angle. Second, it is not easy to select an appropriate departure angle, especially for high ID, so it is probable that the trajectory has to be corrected again, forcing the need for another spinning state. A simple solution could avoid excessive MT in this situation. This consists of anticipating the selection of the departure angle (or, in other words, selecting a departure angle slightly smaller than the appropriate angle). By doing so, when the cursor’s direction has to be corrected, the target is placed on its left. The counterclockwise rotation can then help the cursor point to the target very quickly. An explanation of why the experimental MO was negative might stem from intuitive learning by the participants, regarding this efficient mode of steering the cursor. Third, the cursor spins discretely in different step angles,
, every 0.9 s (the time assumed necessary for the system to detect a double blink). This
was initially set to 13
o, meaning that the cursor takes 25 s to complete a turn. To reduce this time, a possible solution would be to make
greater—for example, 25—. In spite of the fact that there will be a decrease in rotation time, it is not clear that this will benefit the movement time, as a higher number of trajectory corrections might be needed, especially for small and far targets. To address this question, we conducted a preliminary single-run study, without attention control of speed, and with an increased rotation frequency, approximately twice the original (i.e., it now takes only 12 s to complete a turn).
Table 16 shows the new results, along with the previous ones. As can be seen, there was a reduction in
of more than 30%, without a loss in
. This suggests that there may be still a margin to improve the proposed approach and increase both the ITR and T. Nevertheless, a study must be conducted with more participants and using statistical tools, in order to extract robust conclusions.
BCI studies usually show the averaged time of selecting elements on the screen. For example, in [
12], the authors proposed an SSVEP–BCI system which obtained an MT value of 21.3 s; in [
24], the authors developed a hybrid approach combining P300, MI, and SSVEP in two different designs, where the best design achieved an MT of 19 s. Another approach, based on EOG and EEG [
32], obtained an averaged time of 19.9 s. In our study, it was possible to obtain an
of 23.2 s using only large targets (or low ID), which was similar to the aforementioned works, and we determined that it is also possible to reduce this time down to 17.5 s by simply doubling the spinning frequency.
It is remarkable that most participants (people without disabilities) reported that they were able to control the cursor’s movements and make a selection properly. Only one of them admitted that they had experienced difficulty, and, in the group, two participants declared their low capacity in controlling the cursor speed through the modulation of their attention level. According to the SAM test, 75% of participants reported positive incremental valence at the end of all runs, and two-thirds of participants defined their final state using positive words, such as ‘enthusiastic’, ‘interested’, ‘confident’, and so on. In contrast, the most important negative emotional word was ‘bored’, appearing with a frequency of 21.7%.
The duration of the experiment, which may widely vary among studies, is also an important variable to take into account, as it may have a relative influence on the fatigue, tiredness, or/and boredom of participants. Consequently, it was difficult to compare our results with those of other similar studies. In [
32], the authors performed a workload evaluation through the NASA-TLX questionnaire [
65], which assesses factors such as mental demand, effort, and frustration level. Ten participants who performed several tasks with a hybrid BCI, including the use of a web browser or writing text, among others, which took them a few minutes to complete, scored under 40% on average, indicating a moderate to high mental demand and effort. Although, on average, the results obtained can be considered acceptable [
66], it would have been very interesting to analyze their use for a longer period of time. In spite of the fact that our approach took around
min to complete a run, our 20 participants scored the experience positively in a percentage superior to 75%.
A final remark regarding the attention level is that it was a key factor to obtaining better figures. We believe that, aside from modulating the cursor speed, it contributed to better navigation in general, involving a lower number of errors, better departure angle selection in the spinning state, and so on. All of these factors influenced the movement time. Further research must be performed to verify this hypothesis.


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}