
An RSS Transform—Based WKNN for Indoor Positioning

Abstract
:1. Introduction
- After analyzing the relationship between RSS and physical distance in signal propagation, base Q is proposed to smooth fluctuation by transforming RSS before the similarity match;
- A new AP selection method is proposed, which selects APs that contribute more to the positioning;
- An adaptive K value is proposed, which is dynamically determined according to the distance collection S between RPs and TP;
- Based on the above three parts of this work, the Q-WKNN algorithm is proposed. The algorithm is compared to commonly used algorithms such as WKNN, M-WKNN, GK, and LS-SVM to demonstrate its improved positioning accuracy and real-time performance. The environment where the Q-WKNN algorithm could achieve better position results is found.
2. Related Work
2.1. Processing for RSS Fluctuation
2.2. AP Selection
2.3. Popular Fingerprint Positioning Algorithms
3. Details of Proposed Algorithm
3.1. Fingerprint and Database
3.2. RSS Fluctuation in Raw Fingerprint
3.3. Data Preprocessing
3.4. RSS Propagation and Base Q
3.5. AP Selection Algorithm
3.6. Adaptive K Algorithm
3.7. Q-WKNN
4. Experiment and Discussion
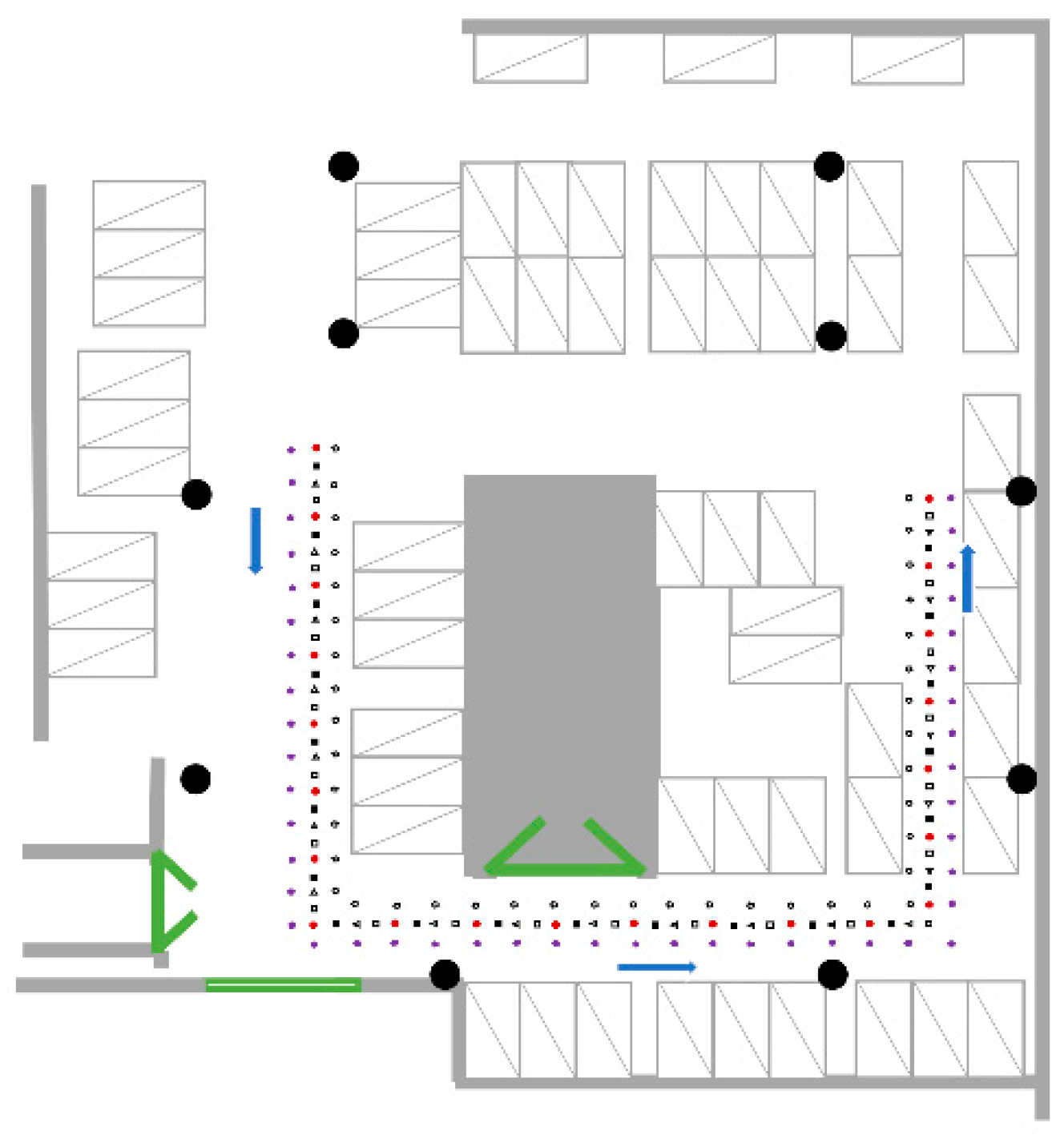
4.1. Experiment Environment
4.2. Results and Comparison
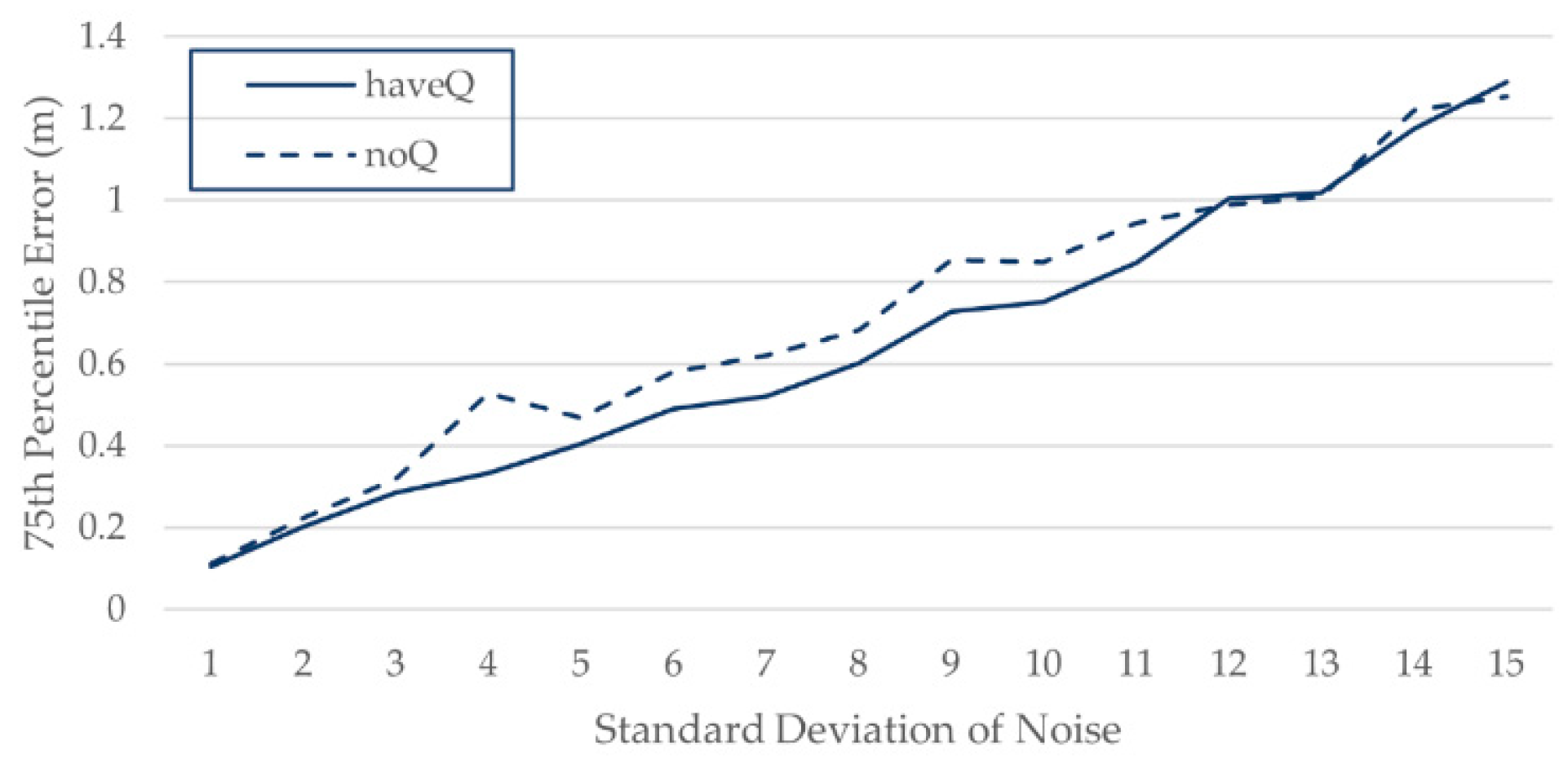
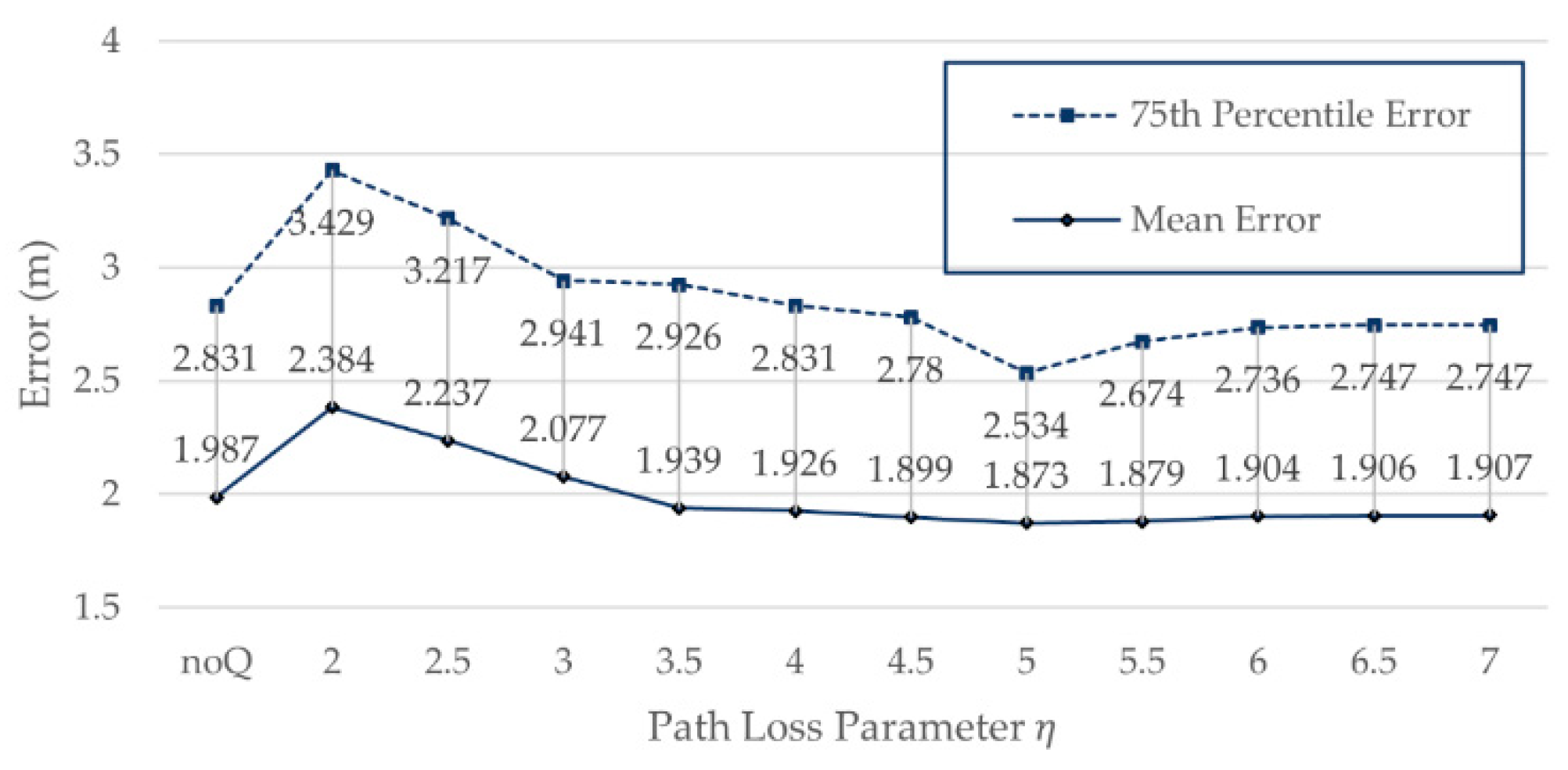
4.2.1. Impact of base Q
4.2.2. Impact of Reliable AP Number L
4.2.3. Impact of K in WKNN
4.2.4. Positioning Accuracy Comparison of Algorithms
4.2.5. Time-Consumption Comparison of Algorithms
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xie, Y.; Wang, Y.; Nallanathan, A.; Wang, L. An improved K-nearest-neighbor indoor localization method based on spearman distance. IEEE Signal Process. Lett. 2016, 23, 351–355. [Google Scholar] [CrossRef] [Green Version]
- Sun, D.; Wei, E.; Ma, Z.; Wu, C.; Xu, S. Optimized CNNs to Indoor Localization through BLE Sensors Using Improved PSO. Sensors 2021, 21, 1995. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. Indoor positioning on disparate commercial smartphones using Wi-Fi access points coverage area. Sensors 2019, 19, 4351. [Google Scholar] [CrossRef] [Green Version]
- Krapež, P.; Vidmar, M.; Munih, M. Distance Measurements in UWB-Radio Localization Systems Corrected with a Feedforward Neural Network Model. Sensors 2021, 21, 2294. [Google Scholar] [CrossRef]
- Liu, M.; Wang, H.; Yang, Y.; Zhang, Y.; Ma, L.; Wang, N. Rfid 3-d indoor localization for tag and tag-free target based on interference. IEEE Trans. Instrum. Meas. 2018, 68, 3718–3732. [Google Scholar] [CrossRef]
- Bai, S.; Luo, Y.; Wan, Q. Transfer Learning for Wireless Fingerprinting Localization Based on Optimal Transport. Sensors 2020, 20, 6994. [Google Scholar] [CrossRef] [PubMed]
- He, S.; Chan, S.-H.G. Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Commun. Surv. Tutor. 2015, 18, 466–490. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Martínez-Usó, A.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 261–270. [Google Scholar]
- Torres-Sospedra, J.; Jiménez, A.R.; Knauth, S.; Moreira, A.; Beer, Y.; Fetzer, T.; Ta, V.-C.; Montoliu, R.; Seco, F.; Mendoza-Silva, G.M.J.S. The smartphone-based offline indoor location competition at IPIN 2016: Analysis and future work. Sensors 2017, 17, 557. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mendoza-Silva, G.M.; Richter, P.; Torres-Sospedra, J.; Lohan, E.S.; Huerta, J. Long-term WiFi fingerprinting dataset for research on robust indoor positioning. Data 2018, 3, 3. [Google Scholar] [CrossRef] [Green Version]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000. Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No. 00CH37064), Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Gansemer, S.; Püschel, S.; Frackowiak, R.; Hakobyan, S.; Grossmann, U. Improved RSSI-based Euclidean distance positioning algorithm for large and dynamic WLAN environments. Int. J. Comput. 2010, 9, 37–44. [Google Scholar] [CrossRef]
- Liu, W.; Fu, X.; Deng, Z.; Xu, L.; Jiao, J. Smallest enclosing circle-based fingerprint clustering and modified-WKNN matching algorithm for indoor positioning. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2017, Sapporo, Japan, 18–21 September 2016; pp. 1–6. [Google Scholar]
- Roos, T.; Myllymäki, P.; Tirri, H.; Misikangas, P.; Sievänen, J. A probabilistic approach to WLAN user location estimation. Int. J. Wirel. Inf. Netw. 2002, 9, 155–164. [Google Scholar] [CrossRef]
- Pei, L.; Liu, J.; Guinness, R.; Chen, Y.; Kuusniemi, H.; Chen, R. Using LS-SVM based motion recognition for smartphone indoor wireless positioning. Sensors 2012, 12, 6155–6175. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wei, Y.; Wang, D.; Yan, Z. Axial decoupled LS-SVMs for indoor positioning using RSS fingerprints. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 3920–3925. [Google Scholar]
- Zhang, C.; Qin, N.; Xue, Y.; Yang, L. Received signal strength-based indoor localization using hierarchical classification. Sensors 2020, 20, 1067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ashraf, I.; Hur, S.; Park, S.; Park, Y. DeepLocate: Smartphone based indoor localization with a deep neural network ensemble classifier. Sensors 2020, 20, 133. [Google Scholar] [CrossRef] [Green Version]
- Bozkurt, S.; Elibol, G.; Gunal, S.; Yayan, U. A comparative study on machine learning algorithms for indoor positioning. In Proceedings of the 2015 International Symposium on Innovations in Intelligent SysTems and Applications (INISTA), Madrid, Spain, 2–4 September 2015; pp. 1–8. [Google Scholar]
- Lymberopoulos, D.; Liu, J.; Yang, X.; Choudhury, R.R.; Handziski, V.; Sen, S. A realistic evaluation and comparison of indoor location technologies: Experiences and lessons learned. In Proceedings of the 14th International Conference on Information Processing in Sensor Networks, Seattle, WA, USA, 14–16 April 2015; pp. 178–189. [Google Scholar]
- Tse, D.; Viswanath, P. Fundamentals of Wireless Communication, 4th ed.; Cambridge University Press: Cambridge, UK, 2006; p. 31. [Google Scholar]
- Youssef, M.; Agrawala, A. Handling samples correlation in the horus system. In Proceedings of the IEEE Infocom 2004—The Conference on Computer Communications—Twenty Third Annual Joint Conference of the IEEE Computer and Communications Societies, Hong Kong, China, 7–11 March 2004; pp. 1023–1031. [Google Scholar]
- Lin, K.; Chen, M.; Deng, J.; Hassan, M.M.; Fortino, G. Enhanced fingerprinting and trajectory prediction for IoT localization in smart buildings. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1294–1307. [Google Scholar] [CrossRef]
- Wu, C.; Xu, J.; Yang, Z.; Lane, N.D.; Yin, Z. Gain without pain: Accurate WiFi-based localization using fingerprint spatial gradient. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 1–19. [Google Scholar] [CrossRef]
- Fang, S.-H.; Lin, T.-N.; Lee, K.-C. A novel algorithm for multipath fingerprinting in indoor WLAN environments. IEEE Trans. Wirel. Commun. 2008, 7, 3579–3588. [Google Scholar] [CrossRef]
- Wang, B.; Zhou, S.; Liu, W.; Mo, Y. Indoor localization based on curve fitting and location search using received signal strength. IEEE Trans. Ind. Electron. 2014, 62, 572–582. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Trilles, S.; Belmonte, Ó.; Huerta, J. Comprehensive analysis of distance and similarity measures for Wi-Fi fingerprinting indoor positioning systems. Expert Syst. Appl. 2015, 42, 9263–9278. [Google Scholar] [CrossRef]
- Peng, X.; Chen, R.; Yu, K.; Ye, F.; Xue, W. An Improved Weighted K-Nearest Neighbor Algorithm for Indoor Localization. Electronics 2020, 9, 2117. [Google Scholar] [CrossRef]
- Li, Z.; Zhong, X.; Wei, J.; Shi, H. The application of manhattan tangent distance in outdoor fingerprint localization. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–5. [Google Scholar]
- Du, X.; Yang, K. A map-assisted WiFi AP placement algorithm enabling mobile device’s indoor positioning. IEEE Syst. J. 2016, 11, 1467–1475. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, Q.; Yin, J.; Chai, X. Power-efficient access-point selection for indoor location estimation. IEEE Trans. Knowl. 2006, 18, 877–888. [Google Scholar] [CrossRef] [Green Version]
- Deng, Z.; Ma, L.; Xu, Y. Intelligent AP selection for indoor positioning in wireless local area network. In Proceedings of the 2011 6th International ICST Conference on Communications and Networking in China (CHINACOM), Harbin, China, 17–19 August 2011; pp. 257–261. [Google Scholar]
- Jhuang, F.-M.; Hung, C.-F.; Tuan, C.-C.; Wu, Y.-C.; Leu, F.-Y. An AP selection with RSS standard deviation for indoor positioning in Wi-Fi. In Proceedings of the 2015 9th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing, Santa Cantarina, Brazil, 8–10 July 2015; pp. 403–407. [Google Scholar]
- Miao, H.; Wang, Z.; Wang, J.; Zhang, L.; Liu, Z.F. A novel access point selection strategy for indoor location with Wi-Fi. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 5260–5265. [Google Scholar]
- Xue, W.; Qiu, W.; Hua, X.; Yu, K. Improved Wi-Fi RSSI measurement for indoor localization. IEEE Sens. J. 2017, 17, 2224–2230. [Google Scholar] [CrossRef]
- Kaemarungsi, K.; Krishnamurthy, P. Modeling of indoor positioning systems based on location fingerprinting. In Proceedings of the IEEE INFOCOM 2004–The Conference on Computer Communications–Twenty Third Annual Joint Conference of the IEEE Computer and Communications Societies, Hong Kong, China, 7–11 March 2004; pp. 1012–1022. [Google Scholar]
- Luo, R.C.; Hsiao, T.J. Dynamic wireless indoor localization incorporating with an autonomous mobile robot based on an adaptive signal model fingerprinting approach. IEEE Trans. Ind. Electron. 2018, 66, 1940–1951. [Google Scholar] [CrossRef]
- Moghtadaiee, V.; Dempster, A.G. Vector distance measure comparison in indoor location fingerprinting. In Proceedings of the International Global Navigation Satellite Systems Society (IGNSS Symposium), Gold Coast, Australia, 14–16 July 2015. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Zenodo | Park |
|---|---|---|
| Distribution of RPs | Small area, zigzag route | Large area, U-shaped corridor |
| Major obstruction | Book rack | Concrete column, automobile |
| Dynamic change | Movement of people | In and out of vehicles |
| Missing values | Many | Few |
| Data distribution | Left-skewed normal | Approximately normal |
| Week | WKNN (m) | Q-WKNN (m) | Decrease (m) | Percentage of Decrease |
|---|---|---|---|---|
| 1 | 2.339 | 2.236 | 0.103 | 4.41% |
| 2 | 2.357 | 2.028 | 0.329 | 13.98% |
| 3 | 2.108 | 1.700 | 0.409 | 19.38% |
| Algorithm | Q-WKNN | WKNN | M-WKNN | GK | LS-SVM |
|---|---|---|---|---|---|
| Mean Error (m) | 1.858 | 2.331 | 2.241 | 2.362 | 2.376 |
| 75th Percentile Error (m) | 2.524 | 3.075 | 3.085 | 3.19 | 3.208 |
| Algorithm | 1 m | 1.5 m | 2 m | 2.5 m | 3 m |
|---|---|---|---|---|---|
| Q-WKNN | 26.28% | 47.92% | 59.42% | 73.54% | 82.21% |
| WKNN | 15.36% | 30.49% | 46.41% | 60.38% | 73.26% |
| M-WKNN | 15.31% | 37.18% | 47.18% | 65.95% | 73.69% |
| GK | 19.18% | 36.47% | 49.01% | 63.04% | 72.02% |
| LS-SVM | 16.15% | 30.58% | 46.05% | 59.36% | 70.8% |
| Total Number of Test Points | 260 | 780 | 1300 | 2860 | 3900 | |
|---|---|---|---|---|---|---|
| Algorithm | ||||||
| WKNN | 0.1 | 0.4 | 0.8 | 1.7 | 2.6 | |
| M-WKNN | 0.1 | 0.5 | 1.1 | 2.3 | 3.4 | |
| Q-WKNN | 0.1 | 0.3 | 0.6 | 1.3 | 2.0 | |
| GK | 1.0 | 3.3 | 5.6 | 12.4 | 16.2 | |
| LS-SVM | 0.2 | 0.5 | 1.2 | 2.6 | 3.8 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, R.; Yang, Y.; Chen, P. An RSS Transform—Based WKNN for Indoor Positioning. Sensors 2021, 21, 5685. https://doi.org/10.3390/s21175685
Zhou R, Yang Y, Chen P. An RSS Transform—Based WKNN for Indoor Positioning. Sensors. 2021; 21(17):5685. https://doi.org/10.3390/s21175685
Chicago/Turabian StyleZhou, Rong, Yexi Yang, and Puchun Chen. 2021. "An RSS Transform—Based WKNN for Indoor Positioning" Sensors 21, no. 17: 5685. https://doi.org/10.3390/s21175685
APA StyleZhou, R., Yang, Y., & Chen, P. (2021). An RSS Transform—Based WKNN for Indoor Positioning. Sensors, 21(17), 5685. https://doi.org/10.3390/s21175685