
SFPD: Simultaneous Face and Person Detection in Real-Time for Human–Robot Interaction


Abstract
:1. Introduction
- We propose a new CNN for Simultaneous Face and Person Detection (SFPD) in real-time, which is completely end-to-end trainable using MTL with two datasets, each containing the ground truths for one of the two detection tasks;
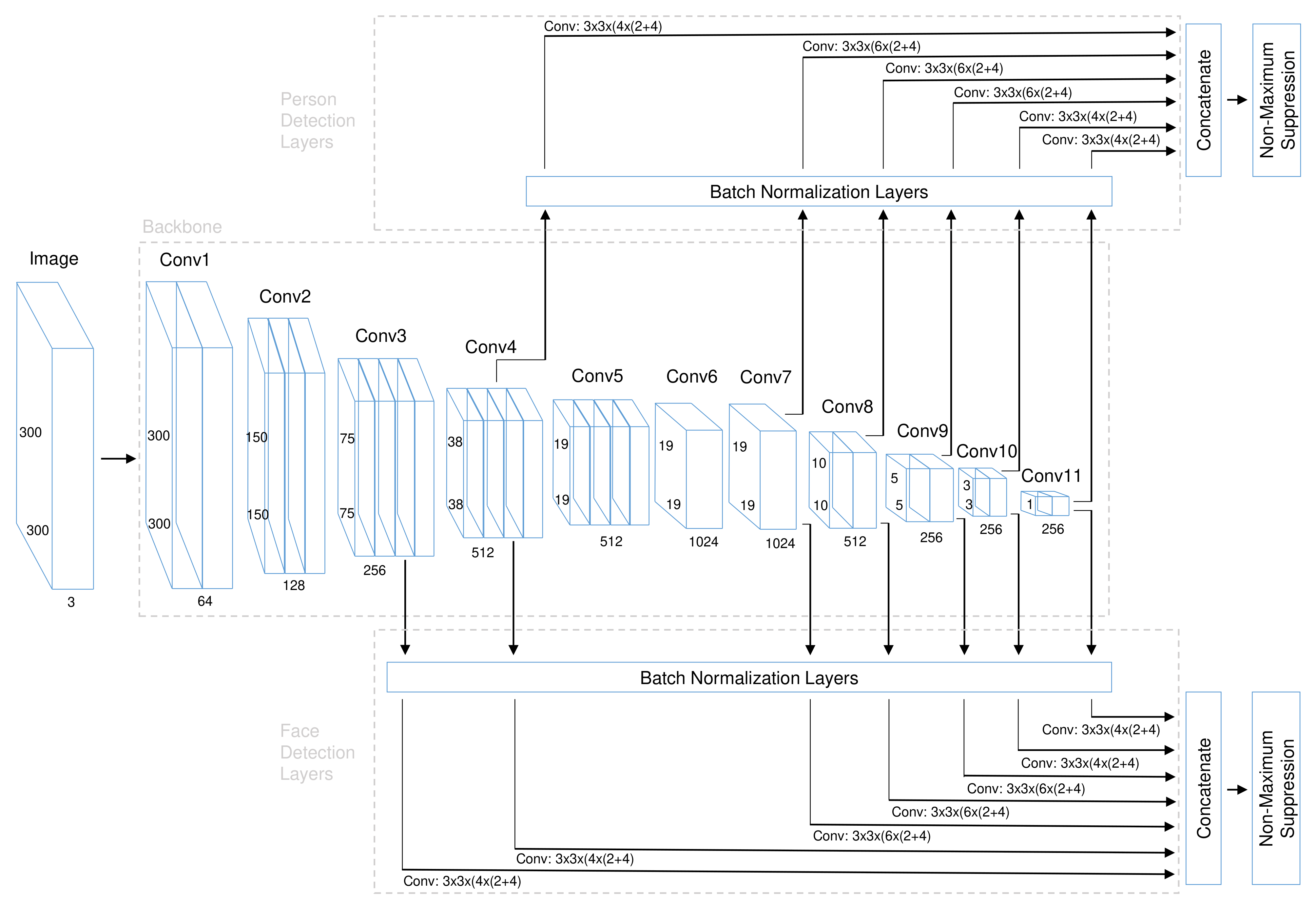
- A new network architecture was developed which consists of a joint backbone with shared feature maps and separate detection layers for each task;
- A multi-task loss was designed which allows to generate loss values throughout the whole training process despite missing ground truth labels in the training datasets;
- Comprehensive experimental validation was performed by comparing the detection performance and inference runtime of multiple algorithms.
2. Related Work
2.1. Object Detection
2.2. Face Detection
2.3. Multi-Task Learning (MTL)
3. Method
3.1. Network Architecture
3.2. Loss Function
4. Experiments and Results
4.1. Datasets
4.2. Training Procedure
4.3. Evaluation Results and Discussion
4.4. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CNN | convolutional neural network |
| DPM | deformable parts model |
| fps | frames per second |
| GIoU | generalized intersection over union |
| GPU | graphics processing unit |
| HCI | human-computer interaction |
| HOG | histogram of oriented gradient |
| IoU | intersection over union |
| L | loss |
| L | confidence loss |
| L | regression loss |
| MTL | multi-task learning |
| NMS | non-maximum suppression |
| ReLU | rectified linear unit |
| SFPD | simultaneous face and person detection |
| SGD | stochastic gradient descent |
References
- Wang, M.; Deng, W. Deep face recognition: A survey. arXiv 2018, arXiv:1804.06655. [Google Scholar]
- Werner, P.; Saxen, F.; Al-Hamadi, A.; Yu, H. Generalizing to unseen head poses in facial expression recognition and action unit intensity estimation. In Proceedings of the IEEE International Conference on Automatic Face & Gesture Recognition (FG), Lille, France, 14–18 May 2019. [Google Scholar] [CrossRef] [Green Version]
- Werner, P.; Saxen, F.; Al-Hamadi, A. Facial action unit recognition in the wild with multi-task CNN self-training for the EmotioNet challenge. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 1649–1652. [Google Scholar] [CrossRef]
- Handrich, S.; Waxweiler, P.; Werner, P.; Al-Hamadi, A. 3D human pose estimation using stochastic optimization in real time. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 555–559. [Google Scholar] [CrossRef]
- Saxen, F.; Werner, P.; Handrich, S.; Othman, E.; Dinges, L.; Al-Hamadi, A. Face attribute detection with MobileNetV2 and NasNet-Mobile. In Proceedings of the International Symposium on Image and Signal Processing and Analysis (ISPA), Dubrovnik, Croatia, 23–25 September 2019; pp. 176–180. [Google Scholar] [CrossRef]
- Zhang, H.B.; Zhang, Y.X.; Zhong, B.; Lei, Q.; Yang, L.; Du, J.X.; Chen, D.S. A comprehensive survey of vision-based human action recognition methods. Sensors 2019, 19, 1005. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, S.; Luo, P.; Loy, C.C.; Tang, X. WIDER Face: A face detection benchmark. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 5525–5533. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal visual object classes (VOC) challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Everingham, M.; Eslami, S.M.A.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal visual object classes challenge: A retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. ImageNet: A large-scale hierarchical image database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar] [CrossRef] [Green Version]
- Uijlings, J.R.R.; van de Sande, K.E.A.; Gevers, T.; Smeulders, A.W.M. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef] [Green Version]
- Zitnick, C.L.; Dollár, P. Edge Boxes: Locating object proposals from edges. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 391–405. [Google Scholar]
- Fang, Z.; Cao, Z.; Xiao, Y.; Zhu, L.; Yuan, J. Adobe Boxes: Locating object proposals using object adobes. IEEE Trans. Image Process. 2016, 25, 4116–4128. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 4, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-FCN: Object detection via region-based fully convolutional networks. arXiv 2016, arXiv:1605.06409. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]
- Pang, J.; Chen, K.; Shi, J.; Feng, H.; Ouyang, W.; Lin, D. Libra R-CNN: Towards balanced learning for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 821–830. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Hu, Z.; Hao, R. Joint information fusion and multi-scale network model for pedestrian detection. Vis. Comput. 2020, 1–10. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLOv3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar] [CrossRef] [Green Version]
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and efficient object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020. [Google Scholar] [CrossRef]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully convolutional one-stage object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019. [Google Scholar] [CrossRef] [Green Version]
- Kong, T.; Sun, F.; Liu, H.; Jiang, Y.; Li, L.; Shi, J. FoveaBox: Beyound anchor-based object detection. IEEE Trans. Image Process. 2020, 29, 7389–7398. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M.J. Robust real-time face detection. Int. J. Comput. Vis. 2004, 57, 137–154. [Google Scholar] [CrossRef]
- Freund, Y.; Schapire, R.E. A decision-theoretic generalization of on-line learning and an application to boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Felzenszwalb, P.F.; Girshick, R.B.; McAllester, D.; Ramanan, D. Object detection with discriminatively trained part-based models. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1627–1645. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Ramanan, D. Face detection, pose estimation, and landmark localization in the wild. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 2879–2886. [Google Scholar]
- Yan, J.; Lei, Z.; Wen, L.; Li, S.Z. The fastest deformable part model for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 2497–2504. [Google Scholar] [CrossRef] [Green Version]
- Mathias, M.; Benenson, R.; Pedersoli, M.; Gool, L. Face detection without bells and whistles. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. Proc. IEEE Conf. Comput. Vis. Pattern Recognit. 2005, 1, 886–893. [Google Scholar] [CrossRef] [Green Version]
- Ranjan, R.; Sankaranarayanan, S.; Bansal, A.; Bodla, N.; Chen, J.C.; Patel, V.M.; Castillo, C.D.; Chellappa, R. Deep learning for understanding faces: Machines may be just as good, or better, than humans. IEEE Signal Process. Mag. 2018, 35, 66–83. [Google Scholar] [CrossRef]
- Li, H.; Lin, Z.; Shen, X.; Brandt, J.; Hua, G. A convolutional neural network cascade for face detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 5325–5334. [Google Scholar] [CrossRef]
- Rothe, R.; Guillaumin, M.; Gool, L. Non-maximum suppression for object detection by passing messages between windows. In Proceedings of the Asian Conference on Computer Vision (ACCV), Singapore, 1–5 November 2014. [Google Scholar]
- Zhang, K.; Zhang, Z.; Li, Z.; Qiao, Y. Joint face detection and alignment using multitask cascaded convolutional networks. IEEE Signal Process. Lett. 2016, 23, 1499–1503. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Ji, X.; Zhou, Z.; Wang, H.; Li, Z. Detecting faces using region-based fully convolutional networks. arXiv 2017, arXiv:1709.05256. [Google Scholar]
- Zhang, S.; Zhu, X.; Lei, Z.; Shi, H.; Wang, X.; Li, S. S3FD: Single shot scale-invariant face detector. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 192–201. [Google Scholar]
- Wang, J.; Yuan, Y.; Yu, G. Face Attention Network: An effective face detector for the occluded faces. arXiv 2017, arXiv:1711.07246. [Google Scholar]
- Tang, X.; Du, D.K.; He, Z.; Liu, J. PyramidBox: A context-assisted Single Shot Face Detector. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Yang, S.; Xiong, Y.; Loy, C.C.; Tang, X. Face detection through scale-friendly deep convolutional networks. arXiv 2017, arXiv:1706.02863. [Google Scholar]
- Deng, J.; Guo, J.; Ververas, E.; Kotsia, I.; Zafeiriou, S. RetinaFace: Single-shot multi-level face localisation in the wild. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 5202–5211. [Google Scholar] [CrossRef]
- Li, J.; Wang, Y.; Wang, C.; Tai, Y.; Qian, J.; Yang, J.; Wang, C.; Li, J.; Huang, F. DSFD: Dual shot face detector. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 5055–5064. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Lai, S.; Qian, X. DBCFace: Towards PURE convolutional neural network face detection. IEEE Trans. Circuits Syst. Video Technol. 2021. [Google Scholar] [CrossRef]
- Chen, W.; Huang, H.; Peng, S.; Zhou, C.; Zhang, C. YOLO-face: A real-time face detector. Vis. Comput. 2020, 37, 805–813. [Google Scholar] [CrossRef]
- Thung, K.H.; Wee, C.Y. A brief review on multi-task learning. Multimed. Tools Appl. 2018, 77, 29705–29725. [Google Scholar] [CrossRef]
- Caruana, R. Multitask Learning. Encycl. Mach. Learn. Data Min. 1998, 28, 41–75. [Google Scholar] [CrossRef]
- Dehghan, A.; Ortiz, E.G.; Shu, G.; Masood, S.Z. DAGER: Deep age, gender and emotion recognition using convolutional neural network. arXiv 2017, arXiv:1702.04280. [Google Scholar]
- Ranjan, R.; Patel, V.M.; Chellappa, R. HyperFace: A deep multi-task learning framework for face detection, landmark localization, pose estimation, and gender recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 121–135. [Google Scholar] [CrossRef] [Green Version]
- Ranjan, R.; Sankaranarayanan, S.; Castillo, C.D.; Chellappa, R. An All-In-One convolutional neural network for face analysis. In Proceedings of the IEEE International Conference on Automatic Face & Gesture Recognition (FG), Washington, DC, USA, 30 May–3 June 2017; pp. 17–24. [Google Scholar] [CrossRef] [Green Version]
- Levi, G.; Hassner, T. Age and gender classification using convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Boston, MA, USA, 7–12 June 2015; pp. 34–42. [Google Scholar]
- Zhang, Z.; Luo, P.; Loy, C.C.; Tang, X. Facial landmark detection by deep multi-task learning. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Gkioxari, G.; Hariharan, B.; Girshick, R.B.; Malik, J. R-CNNs for pose estimation and action detection. arXiv 2014, arXiv:1406.5212. [Google Scholar]
- Chen, D.; Ren, S.; Wei, Y.; Cao, X.; Sun, J. Joint cascade face detection and alignment. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Saxen, F.; Handrich, S.; Werner, P.; Othman, E.; Al-Hamadi, A. Detecting arbitrarily rotated faces for face analysis. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 3945–3949. [Google Scholar] [CrossRef]
- He, K.; Fu, Y.; Xue, X. A jointly learned deep architecture for facial attribute analysis and face detection in the wild. arXiv 2017, arXiv:1707.08705. [Google Scholar]
- Wu, H.; Zhang, K.; Tian, G. Simultaneous face detection and pose estimation using convolutional neural network cascade. IEEE Access 2018, 6, 49563–49575. [Google Scholar] [CrossRef]
- Cipolla, R.; Gal, Y.; Kendall, A. Multi-task learning using uncertainty to weigh losses for scene geometry and semantics. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 7482–7491. [Google Scholar] [CrossRef] [Green Version]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2015, arXiv:1409.1556. [Google Scholar]
- Glorot, X.; Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proceedings of the International Conference on Artificial Intelligence and Statistics (AISTATS), Sardinia, Italy, 13–15 May 2010. [Google Scholar]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.Y.; Maire, M.; Belongie, S.J.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common objects in context. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Yang, B.; Yan, J.; Lei, Z.; Li, S.Z. Aggregate channel features for multi-view face detection. In Proceedings of the IEEE International Joint Conference on Biometrics, Clearwater, FL, USA, 29 September–2 October 2014; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Luo, P.; Loy, C.C.; Tang, X. From facial parts responses to face detection: A deep learning approach. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 3676–3684. [Google Scholar] [CrossRef] [Green Version]
- Ohn-Bar, E.; Trivedi, M.M. To boost or not to boost? On the limits of boosted trees for object detection. In Proceedings of the International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; pp. 3350–3355. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Xu, X.; Tu, D. Face detection using improved Faster RCNN. arXiv 2018, arXiv:1802.02142. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VOC Test Set | ||||
|---|---|---|---|---|
| Method | 2007 | 2012 | fps | GPU |
| Fast R-CNN [16] | 69.9 | 72.0 | 1 | Tesla K40 |
| Faster R-CNN [17] | 76.7 | 79.6 | 5 | Tesla K40 |
| 7 | Titan X | |||
| SSD300 [25] | 76.2 | 79.4 | 46 | Titan X |
| SSD512 [25] | 79.7 | 83.3 | 19 | Titan X |
| YOLO [22] | - | 63.5 | 45 | Titan X |
| YOLOv2 [23] | - | 81.3 | 40 | Titan X |
| EfficientDet-D2 [27] † | 78.8 | 81.9 | 43 | Titan V |
| EfficientDet-D3 [27] † | 81.1 | 85.6 | 27 | Titan V |
| RetinaNet [26] | 78.3 | - | 14 | Tesla V100 |
| FoveaBox [29] | 79.5 | - | 16 | Tesla V100 |
| SFPD [ours] | 78.1 | 81.5 | 40 * | RTX 2080 Ti |
| WIDER Validation Set | |||||
|---|---|---|---|---|---|
| Method | Easy | Medium | Hard | fps | GPU |
| YOLOv2 [23] (from [49]) | 33.1 | 29.3 | 13.8 | 40 | Titan X |
| ACF-WIDER [67] | 65.9 | 54.1 | 27.3 | 20 | CPU |
| Two-stage CNN [7] | 68.1 | 61.8 | 32.3 | - | - |
| YOLOv3 [24] (from [49]) | 68.3 | 69.2 | 51.1 | 35 | Titan X |
| Multi-scale Cascade CNN [7] | 69.1 | 66.4 | 42.4 | - | - |
| Faceness-WIDER [68] | 71.3 | 63.4 | 45.6 | - | - |
| LDCF+ [69] | 79.0 | 76.9 | 52.2 | 3 | CPU |
| YOLO-face (darknet-53) [49] | 82.5 | 77.8 | 52.5 | 45 | GTX 1080 Ti |
| Multitask Cascade CNN [40] | 84.8 | 82.5 | 59.8 | 16 | Titan Black |
| ScaleFace [45] | 86.8 | 86.7 | 77.2 | 4 | Titan X |
| YOLO-face (deeper darknet) [49] | 89.9 | 87.2 | 69.3 | 38 | GTX 1080 Ti |
| DSFD (ResNet50) [47] | 93.7 | 92.2 | 81.8 | 22 | Tesla P40 |
| Face R-FCN [41] | 94.7 | 93.5 | 87.4 | 3 | Tesla K80 |
| FCOS [28] (from [48]) | 95.0 | 90.6 | 55.0 | - | - |
| FAN [43] | 95.2 | 94.0 | 90.0 | 11 | Titan Xp |
| FoveaBox [29] (from [48]) | 95.6 | 93.5 | 67.8 | 11 | Tesla V100 |
| DBCFace [48] | 95.8 | 95.0 | 90.3 | 7 | GTX 1080 Ti |
| FDNet [70] | 95.9 | 94.5 | 87.9 | - | - |
| PyramidBox [44] | 96.1 | 95.0 | 88.9 | 3 | Titan RTX |
| DSFD (ResNet152) [47] | 96.6 | 95.7 | 90.4 | - | - |
| RetinaFace [46] | 96.9 | 96.1 | 91.8 | 13 | Tesla P40 |
| SFPD [ours] | 80.5 | 73.6 | 51.3 | 40 * | RTX 2080 Ti |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fiedler, M.-A.; Werner, P.; Khalifa, A.; Al-Hamadi, A. SFPD: Simultaneous Face and Person Detection in Real-Time for Human–Robot Interaction. Sensors 2021, 21, 5918. https://doi.org/10.3390/s21175918
Fiedler M-A, Werner P, Khalifa A, Al-Hamadi A. SFPD: Simultaneous Face and Person Detection in Real-Time for Human–Robot Interaction. Sensors. 2021; 21(17):5918. https://doi.org/10.3390/s21175918
Chicago/Turabian StyleFiedler, Marc-André, Philipp Werner, Aly Khalifa, and Ayoub Al-Hamadi. 2021. "SFPD: Simultaneous Face and Person Detection in Real-Time for Human–Robot Interaction" Sensors 21, no. 17: 5918. https://doi.org/10.3390/s21175918
APA StyleFiedler, M. -A., Werner, P., Khalifa, A., & Al-Hamadi, A. (2021). SFPD: Simultaneous Face and Person Detection in Real-Time for Human–Robot Interaction. Sensors, 21(17), 5918. https://doi.org/10.3390/s21175918