
A Novel Tool for Gait Analysis: Validation Study of the Smart Insole PODOSmart®

 and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Sample
2.2. Instruments
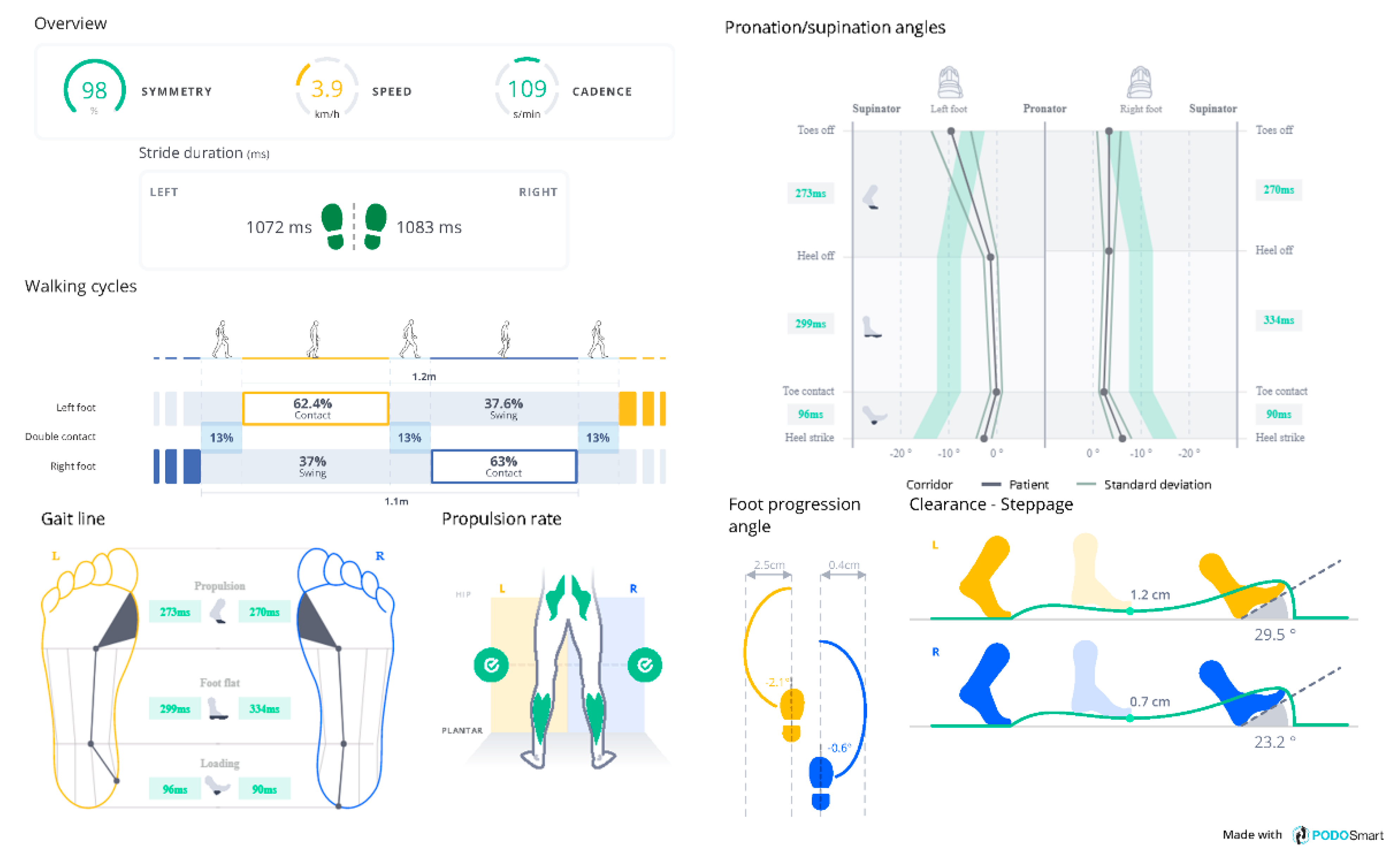
2.2.1. PODOSmart® Insoles
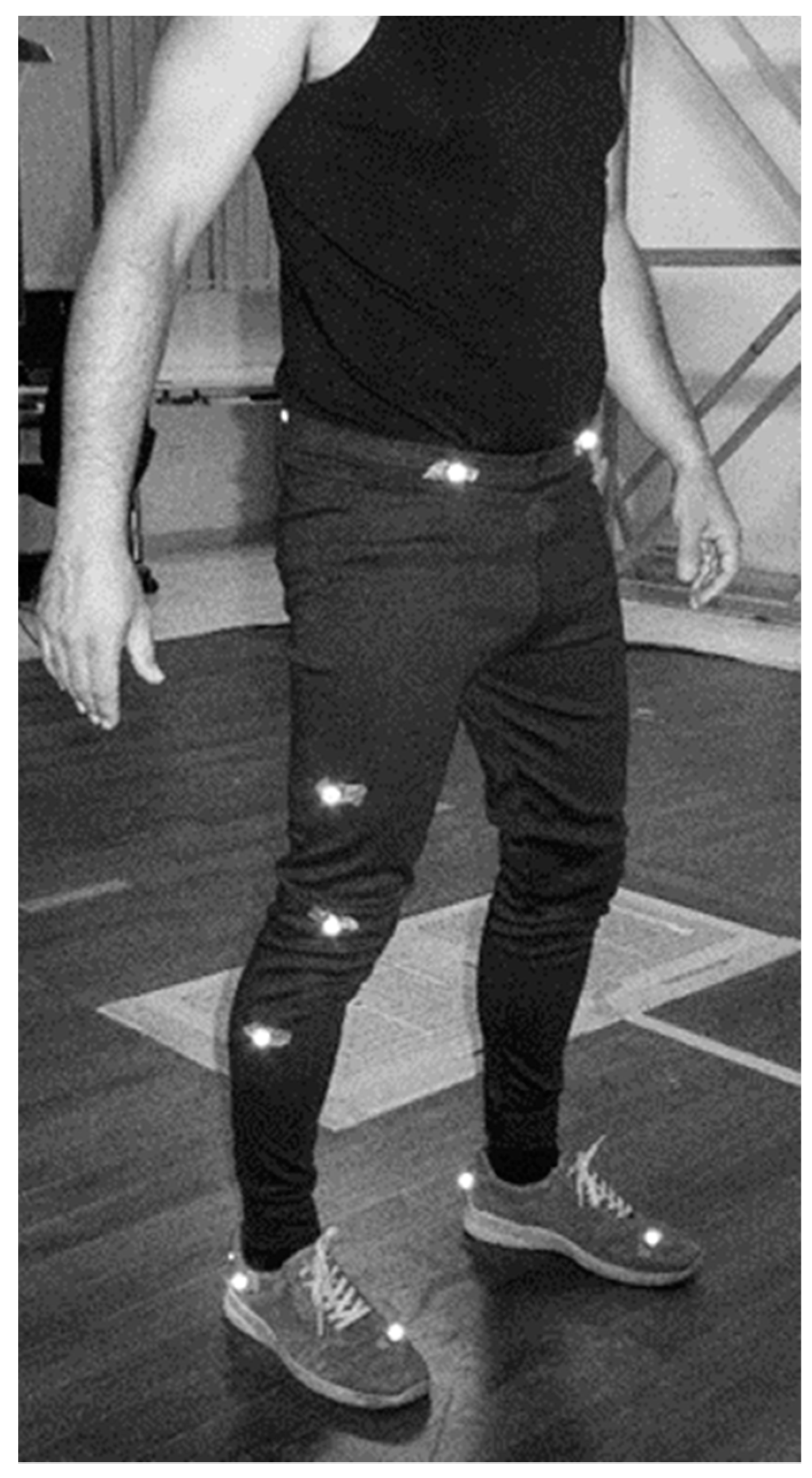
2.2.2. Vicon Motion Capture Device
2.3. Experimental Protocol
2.4. Gait Analysis
- -
- Stride length (m): distance of foot displacement between two consecutive steps on the same side.
- -
- Stride duration (ms): duration of foot displacement between two consecutive steps on the same side.
- -
- Stance time (%): Duration of contact between the foot and the ground during one stride cycle. It is normalized to be expressed as a percentage of the stride duration.
- -
- Swing time (%): Duration with no contact between the foot and the ground during one stride cycle. It is normalized to be expressed as a percentage of the stride duration.
- -
- Foot progression angle (deg): angle between the orientation of the foot and the user’s trajectory.
- -
- Circumduction
- -
- Clearance
- -
- Loading time (ms)
- -
- Flat foot time (ms)
- -
- Heel strike angle (°)
- -
- Propulsion rate (%)
- -
- Propulsion time (ms)
- -
- Supination angle at heel off (°)
- -
- Supination angle at heel strike (°)
- -
- Supination angle at toe off (°)
- -
- Supination angle at toe strike (°)
- -
- Cadence: number of steps per minute; it is the sum of both the feet.
- -
- Speed (km/h): average walking speed of the user overall steps.
- -
- Double contact (%): duration of simultaneous contact between both feet and the ground. It is normalized to be expressed as a percentage of the stride duration.
2.5. Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Caty, G.D.; Detrembleur, C.; Bleyenheuft, C.; Lejeune, T.M. Reliability of lower limb kinematics, mechanics and energetics during gait in patients after stroke. J. Rehabil. Med. 2009, 41, 588–590. [Google Scholar] [CrossRef] [Green Version]
- DeBerardinis, J.; Dufek, J.S.; Trabia, M.B.; Lidstone, D.E. Assessing the validity of pressure-measuring insoles in quantifying gait variables. J. Rehabil. Assist. Technol. Eng. 2018, 5, 2055668317752088. [Google Scholar] [CrossRef] [Green Version]
- Crea, S.; Donati, M.; De Rossi, S.M.M.; Maria Oddo, C.; Vitiello, N. A wireless flexible sensorized insole for gait analysis. Sensors 2014, 14, 1073–1093. [Google Scholar] [CrossRef] [Green Version]
- Kinsella, S.; Moran, K. Gait pattern categorization of stroke participants with equinus deformity of the foot. Gait Posture 2008, 27, 144–151. [Google Scholar] [CrossRef] [PubMed]
- Simon, S.R. Quantification of human motion: Gait analysis—Benefits and limitations to its application to clinical problems. J. Biomech. 2004, 37, 1869–1880. [Google Scholar] [CrossRef] [PubMed]
- Baker, R.; Esquenazi, A.; Benedetti, M.G.; Desloovere, K. Gait analysis: Clinical facts. Eur. J. Phys. Rehabil. Med. 2016, 52, 560–574. [Google Scholar] [PubMed]
- Cimolin, V.; Galli, M. Summary measures for clinical gait analysis: A literature review. Gait Posture 2014, 39, 1005–1010. [Google Scholar] [CrossRef] [PubMed]
- Baker, R. Gait analysis methods in rehabilitation. J. Neuroeng. Rehabil. 2006, 3, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Saggio, G.; Tombolini, F.; Ruggiero, A. Technology-Based Complex Motor Tasks Assessment: A 6-DOF Inertial-Based System Versus a Gold-Standard Optoelectronic-Based One. IEEE Sens. J. 2021, 21, 1616–1624. [Google Scholar] [CrossRef]
- Howell, A.M.; Kobayashi, T.; Hayes, H.A.; Foreman, K.B.; Bamberg, S.J.M. Kinetic gait analysis using a low-cost insole. IEEE Trans. Biomed. Eng. 2013, 60, 3284–3290. [Google Scholar] [CrossRef]
- Van Beers, R.J.; Brenner, E.; Smeets, J.B.J. Random walk of motor planning in task-irrelevant dimensions. J. Neurophysiol. 2013, 109, 969–977. [Google Scholar] [CrossRef]
- Hailey, D.; Tomie, J.A. An assessment of gait analysis in the rehabilitation of children with walking difficulties. Disabil. Rehabil. 2000, 22, 275–280. [Google Scholar] [CrossRef]
- Prasanth, H.; Caban, M.; Keller, U.; Courtine, G.; Ijspeert, A.; Vallery, H.; von Zitzewitz, J. Wearable Sensor-Based Real-Time Gait Detection: A Systematic Review. Sensors 2021, 21, 2727. [Google Scholar] [CrossRef]
- Razak, A.; Zayegh, A.; Begg, R.; Wahab, Y. Foot Plantar Pressure Measurement System: A Review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [Green Version]
- Hurkmans, H.L.P.; Bussmann, J.B.J.; Selles, R.W.; Horemans, H.L.D.; Benda, E.; Stam, H.J.; Verhaar, J.A.N. Validity of the Pedar Mobile system for vertical force measurement during a seven-hour period. J. Biomech. 2006, 39, 110–118. [Google Scholar] [CrossRef] [PubMed]
- Putti, A.B.; Arnold, G.P.; Cochrane, L.; Abboud, R.J. The Pedar® in-shoe system: Repeatability and normal pressure values. Gait Posture 2007, 25, 401–405. [Google Scholar] [CrossRef] [PubMed]
- Braun, B.J.; Veith, N.T.; Hell, R.; Döbele, S.; Roland, M.; Rollmann, M.; Holstein, J.; Pohlemann, T. Validation and reliability testing of a new, fully integrated gait analysis insole. J. Foot Ankle Res. 2015, 11, 1–7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Truong, P.H.; Lee, J.; Kwon, A.R.; Jeong, G.M. Stride counting in human walking and walking distance estimation using insole sensors. Sensors 2016, 16, 823. [Google Scholar] [CrossRef]
- Stöggl, T.; Martiner, A. Validation of Moticon’s OpenGo sensor insoles during gait, jumps, balance and cross-country skiing specific imitation movements. J. Sports Sci. 2017, 35, 196–206. [Google Scholar] [CrossRef] [Green Version]
- Macleod, C.A.; Conway, B.A.; Allan, D.B.; Galen, S.S. Development and validation of a low-cost, portable and wireless gait assessment tool. Med. Eng. Phys. 2014, 36, 541–546. [Google Scholar] [CrossRef] [Green Version]
- Jagos, H.; Pils, K.; Haller, M.; Wassermann, C.; Chhatwal, C.; Rafolt, D.; Rattay, F. Mobile gait analysis via eSHOEs instrumented shoe insoles: A pilot study for validation against the gold standard GAITRite®. J. Med. Eng. Technol. 2017, 41, 375–386. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, D.; Ying, J.; Chu, P.; Qian, Y.; Chen, W. Design and Preliminary Validation of Individual Customized Insole for Adults with Flexible Flatfeet Based on the Plantar Pressure Redistribution. Sensors 2021, 21, 1780. [Google Scholar] [CrossRef] [PubMed]
- Duong, T.T.H.; Goldman, S.; Zhang, H.; Salazar, R.; Beenders, S.; Cornett, K.M.; Bain, J.M.; Montes, J.; Zanotto, D. Validation of Insole-Based Gait Analysis System in Young Children with a Neurodevelopmental Disorder and Autism Traits. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; pp. 715–720. [Google Scholar] [CrossRef]
- Burns, G.T.; Deneweth Zendler, J.; Zernicke, R.F. Validation of a wireless shoe insole for ground reaction force measurement. J. Sports Sci. 2019, 37, 1129–1138. [Google Scholar] [CrossRef]
- Ngueleu, A.M.; Blanchette, A.K.; Maltais, D.; Moffet, H.; McFadyen, B.J.; Bouyer, L.; Batcho, C.S. Validity of Instrumented Insoles for Step Counting, Posture and Activity Recognition: A Systematic Review. Sensors 2019, 28, 2438. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kobayashi, H.; Kakihana, W.; Kimura, T. Combined effects of age and gender on gait symmetry and regularity assessed by autocorrelation of trunk acceleration. J. Neuroeng. Rehabil. 2014, 11, 1–6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ko, S.U.; Tolea, M.I.; Hausdorff, J.M.; Ferrucci, L. Sex-specific differences in gait patterns of healthy older adults: Results from the Baltimore Longitudinal Study of Aging. J. Biomech. 2011, 44, 1974–1979. [Google Scholar] [CrossRef] [Green Version]
- Simone, A.; Ludwig, K.D.; Burnham, A.R.J.; Pierre, A.T. Comparison of attitude and heading reference systems using foot mounted MIMU sensor data: Basic, Madgwick, and Mahony. Sens. Smart Struct. Technol. Civ. Mech. Aerosp. Syst. 2018, 10598, 105982L. [Google Scholar] [CrossRef]
- Sabatini, A.M. Quaternion-based strap-down integration method for applications of inertial sensing to gait analysis. Med. Biol. Eng. Comput. 2005, 43, 94–101. [Google Scholar] [CrossRef]
- Ma, M.; Song, Q.; Gu, Y.; Li, Y.; Zhou, Z. An Adaptive Zero Velocity Detection Algorithm Based on Multi-Sensor Fusion for a Pedestrian Navigation System. Sensors 2018, 18, 3261. [Google Scholar] [CrossRef] [Green Version]
- Vicon Motion Systems Limited. Vicon Nexus Reference Guide, Version 3.0; Vicon Motion Systems Limited: Oxford, UK, 2021.
- Vicon Motion Systems Limited. Plug-In Gait Product Guide, Foundation Notes Revision 2.0; Vicon Motion Systems Limited: Oxford, UK, 2008.
- Barre, A.; Armand, S. Biomechanical ToolKit: Open-source framework to visualize and process biomechanical data. Comput. Methods Programs Biomed. 2014, 114, 80–87. [Google Scholar] [CrossRef]
- Weir, J.P. Quantifying test-retest reliability using the intraclass correlation coefficient and the SEM. J. Strength Cond. Res. 2005, 19, 231–240. [Google Scholar] [CrossRef]
- Shrout, P.E.; Fleiss, J.L. Intraclass correlations: Uses in assessing rater reliability. Psychol. Bull. 1979, 86, 420–428. [Google Scholar] [CrossRef]
- Koo, T.K.; Li, M.Y. A Guideline of Selecting and Reporting Intraclass Correlation Coefficients for Reliability Research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peng, Z.; Cao, C.; Huang, J.; Pan, W. Human moving pattern recognition toward channel number reduction based on multipressure sensor network. Int. J. Distrib. Sens. Netw. 2013, 9, 510917. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Sun, M.; Lester, D.K.; Pi-Sunyer, F.X.; Boozer, C.N.; Longman, R.W. Assessment of human locomotion by using an insole measurement system and artificial neural networks. J. Biomech. 2005, 38, 2276–2287. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
| Walking Profile | Oscillating Phase | Stance Phase |
|---|---|---|
| Contact time (ms) | Foot progression angle (°) | Heel strike (°) |
| Flying time (ms) | Clearance (in centimetres) | Toe strike (°) |
| Taligrade (ms) | Steppage (°) | Heel off (°) |
| Plantigrade (ms) | Walking speed (in km per hour) | Toe off (°) |
| Digitigrade (ms) | Stride length (in meters) | |
| Cadence (in steps per minute) |
| Side | Method | Means and S.D. | Reliability | ICC | Sig. | |
|---|---|---|---|---|---|---|
| Cadence (setps/min) | - | Vicon | 66.73 ± 21.13 | Excellent | 0.990 | 0.000 |
| PODOSmart® | 67.68 ± 22.72 | |||||
| Circumduction (cm) | L | Vicon | 2.16 ± 1.00 | Excellent | 0.949 | 0.000 |
| PODOSmart® | 2.09 ± 1.05 | |||||
| R | Vicon | 3.54 ± 0.97 | Moderate | 0.723 | 0.017 | |
| PODOSmart® | 4.10 ± 1.32 | |||||
| Clearance (cm) | L | Vicon | 1.46 ± 0.49 | Moderate | 0.579 | 0.108 |
| PODOSmart® | 1.50 ± 0.57 | |||||
| R | Vicon | 1.04 ± 1.11 | Poor | 0.337 | 0.247 | |
| PODOSmart® | 2.03 ± 2.30 | |||||
| Contact time (%) | L | Vicon | 63.00 ± 2.72 | Moderate | 0.575 | 0.036 |
| PODOSmart® | 61.18 ± 1.25 | |||||
| R | Vicon | 62.27 ± 1.19 | Moderate | 0.568 | 0.026 | |
| PODOSmart® | 60.82 ± 1.72 | |||||
| Double contact (%) | - | Vicon | 12.09 ± 1.11 | Good | 0.784 | 0.000 |
| PODOSmart® | 11.18 ± 1.08 | |||||
| Flat foot time (ms) | L | Vicon | 370.00 ± 50.40 | Moderate | 0.657 | 0.057 |
| PODOSmart® | 380.91 ± 38.44 | |||||
| R | Vicon | 391.82 ± 121.06 | Moderate | 0.577 | 0.106 | |
| PODOSmart® | 410.45 ± 100.94 | |||||
| Foot progression angle (°) | L | Vicon | 6.75 ± 4.51 | Good | 0.755 | 0.014 |
| PODOSmart® | 9.45 ± 8.86 | |||||
| R | Vicon | 9.00 ± 4.59 | Good | 0.782 | 0.016 | |
| PODOSmart® | 9.28 ± 3.54 | |||||
| Heel strike angle (°) | L | Vicon | 18.20 ± 5.69 | Good | 0.792 | 0.009 |
| PODOSmart® | 16.48 ± 5.03 | |||||
| R | Vicon | 17.60 ± 5.40 | Moderate | 0.706 | 0.032 | |
| PODOSmart® | 15.89 ± 5.17 | |||||
| Loading time (ms) | L | Vicon | 221.82 ± 93.37 | Excellent | 0.918 | 0.000 |
| PODOSmart® | 195.27 ± 74.70 | |||||
| R | Vicon | 186.36 ± 72.43 | Good | 0.862 | 0.001 | |
| PODOSmart® | 156.45 ± 76.43 | |||||
| Propulsion rate (%) | L | Vicon | 37.45 ± 7.19 | Poor | 0.476 | 0.065 |
| PODOSmart® | 29.82 ± 7.65 | |||||
| R | Vicon | 36.91 ± 14.84 | Moderate | 0.563 | 0.092 | |
| PODOSmart® | 31.64 ± 7.38 | |||||
| Propulsion time (ms) | L | Vicon | 232.73 ± 44.74 | Moderate | 0.546 | 0.038 |
| PODOSmart® | 265.55 ± 19.06 | |||||
| R | Vicon | 258.64 ± 56.40 | Moderate | 0.699 | 0.039 | |
| PODOSmart® | 268.73 ± 31.90 | |||||
| Walking speed (km/h) | - | Vicon | 2.95 ± 0.37 | Excellent | 0.916 | 0.000 |
| PODOSmart® | 2.92 ± 0.36 | |||||
| Stride duration (ms) | L | Vicon | 1.357.27 ± 100.8 | Excellent | 0.975 | 0.000 |
| PODOSmart® | 1.349.36 ± 104.6 | |||||
| R | Vicon | 1.382.73 ± 101.0 | Excellent | 0.962 | 0.000 | |
| PODOSmart® | 1.383.82 ± 116.1 | |||||
| Stride length (m) | L | Vicon | 1.12 ± 0.08 | Excellent | 0.912 | 0.000 |
| PODOSmart® | 1.10 ± 0.09 | |||||
| R | Vicon | 1.14 ± 0.09 | Excellent | 0.939 | 0.000 | |
| PODOSmart® | 1.15 ± 0.11 | |||||
| Supination angle HO (°) | L | Vicon | −5.96 ± 3.88 | Moderate | 0.730 | 0.028 |
| PODOSmart® | −6.55 ± 1.63 | |||||
| R | Vicon | −6.92 ± 4.34 | Moderate | 0.710 | 0.032 | |
| PODOSmart® | −7.94 ± 2.89 | |||||
| Supination angle HS (°) | L | Vicon | −16.84 ± 4.37 | Poor | 0.438 | 0.139 |
| PODOSmart® | −14.35 ± 1.86 | |||||
| R | Vicon | −15.10 ± 9.78 | Moderate | 0.576 | 0.108 | |
| PODOSmart® | −16.15 ± 5.04 | |||||
| Supination angle TO (°) | L | Vicon | −9.35 ± 7.11 | Poor | 0.374 | 0.239 |
| PODOSmart® | −7.35 ± 4.06 | |||||
| R | Vicon | −11.59 ± 6.31 | Poor | 0.313 | 0.202 | |
| PODOSmart® | −6.55 ± 3.30 | |||||
| Supination angle TS (°) | L | Vicon | −8.98 ± 3.89 | Poor | 0.350 | 0.244 |
| PODOSmart® | −7.48 ± 2.10 | |||||
| R | Vicon | −8.78 ± 3.96 | Moderate | 0.540 | 0.126 | |
| PODOSmart® | −7.95 ± 3.33 | |||||
| Swing time (%) | L | Vicon | 37.27 ± 2.45 | Moderate | 0.577 | 0.043 |
| PODOSmart® | 38.82 ± 1.25 | |||||
| R | Vicon | 37.73 ± 1.27 | Moderate | 0.525 | 0.047 | |
| PODOSmart® | 39.18 ± 1.72 | |||||
| Symmetry (%) | - | Vicon | 92.64 ± 2.50 | Moderate | 0.663 | 0.060 |
| PODOSmart® | 93.00 ± 4.26 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ziagkas, E.; Loukovitis, A.; Zekakos, D.X.; Chau, T.D.-P.; Petrelis, A.; Grouios, G. A Novel Tool for Gait Analysis: Validation Study of the Smart Insole PODOSmart®. Sensors 2021, 21, 5972. https://doi.org/10.3390/s21175972
Ziagkas E, Loukovitis A, Zekakos DX, Chau TD-P, Petrelis A, Grouios G. A Novel Tool for Gait Analysis: Validation Study of the Smart Insole PODOSmart®. Sensors. 2021; 21(17):5972. https://doi.org/10.3390/s21175972
Chicago/Turabian StyleZiagkas, Efthymios, Andreas Loukovitis, Dimitrios Xypolias Zekakos, Thomas Duc-Phu Chau, Alexandros Petrelis, and George Grouios. 2021. "A Novel Tool for Gait Analysis: Validation Study of the Smart Insole PODOSmart®" Sensors 21, no. 17: 5972. https://doi.org/10.3390/s21175972
APA StyleZiagkas, E., Loukovitis, A., Zekakos, D. X., Chau, T. D. -P., Petrelis, A., & Grouios, G. (2021). A Novel Tool for Gait Analysis: Validation Study of the Smart Insole PODOSmart®. Sensors, 21(17), 5972. https://doi.org/10.3390/s21175972