
Particle Classification through the Analysis of the Forward Scattered Signal in Optical Tweezers

 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
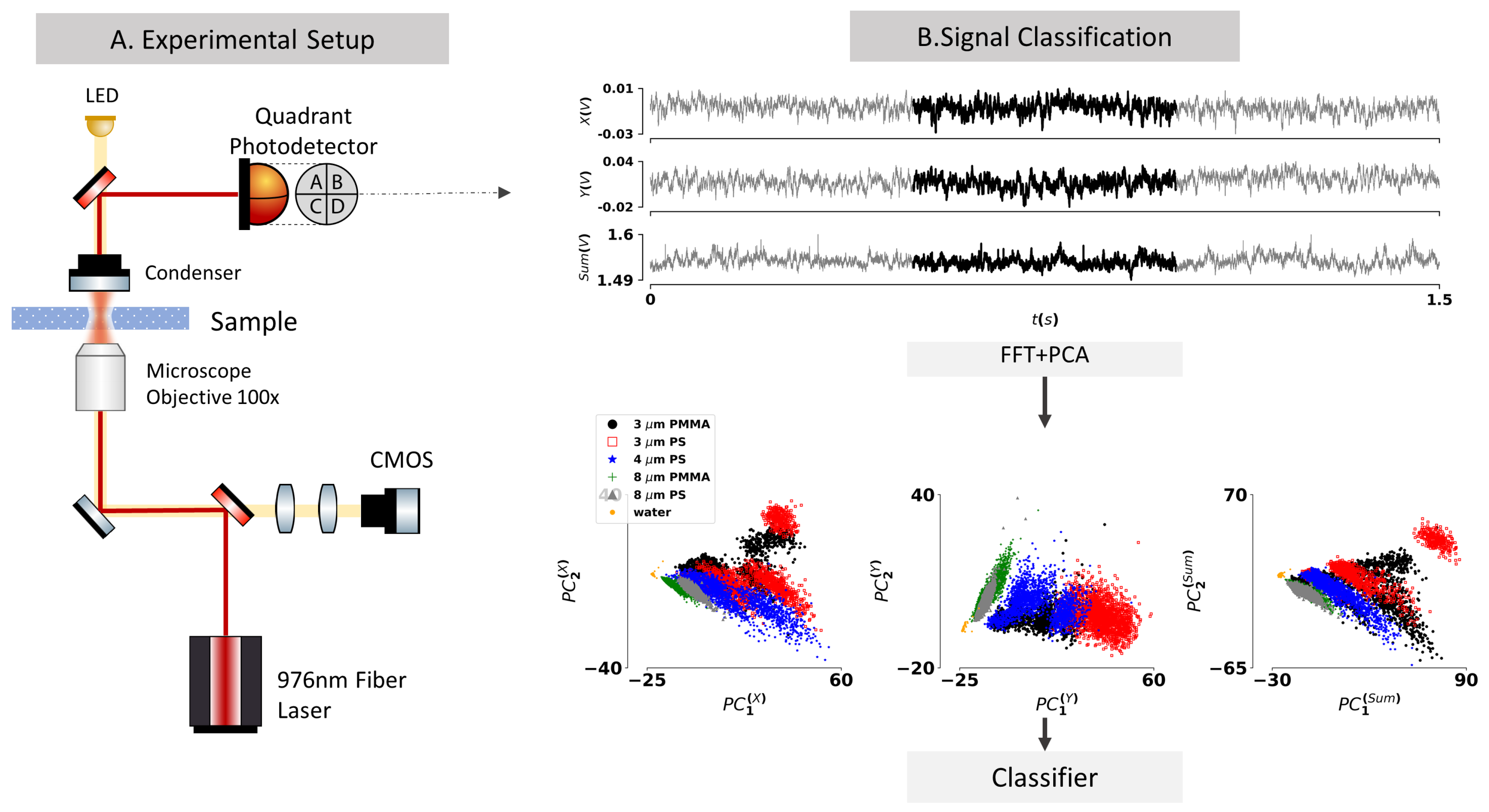
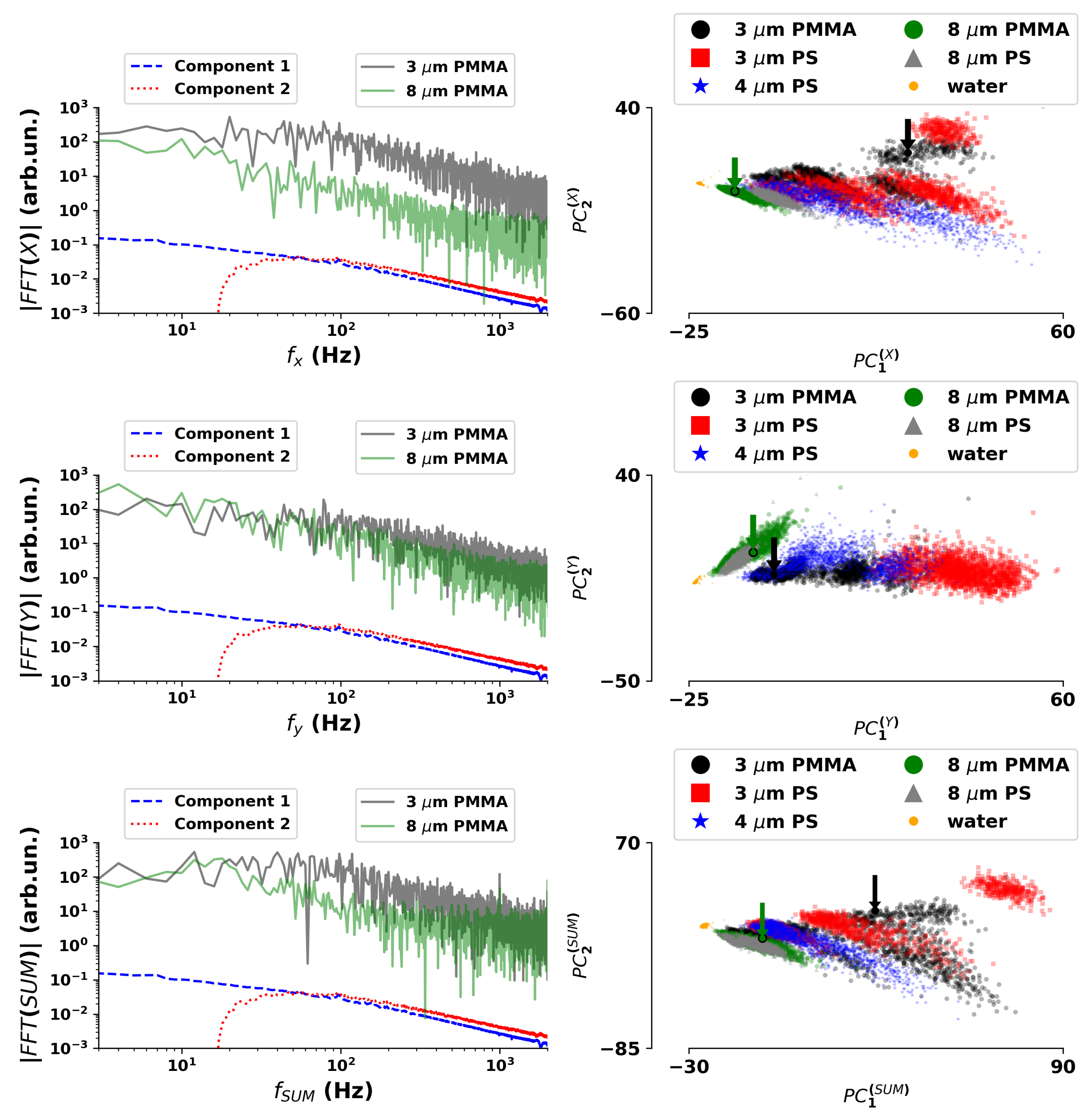
2.1. Physical Model
2.2. Experimental Methods and Tools
2.3. Classification Algorithms and Procedures
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PS | Polystyrene |
| PMMA | Polymethyl Methacrylate |
| OT | Optical Tweezers |
| QPD | Quadrant Photodetector |
| PCA | Principal Component Analysis |
| FFT | Fast Fourier Transform |
Appendix A. Notes on the Pre-Processing Procedure


References
- Ashkin, A.; Dziedzic, J.M.; Bjorkholm, J.E.; Chu, S. Observation of a single-beam gradient force optical trap for dielectric particles. Opt. Lett. 1986, 11, 288. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, D.; Bodovitz, S. Single cell analysis: The new frontier in ‘omics’. Trends Biotechnol. 2010, 28, 281–290. [Google Scholar] [CrossRef] [Green Version]
- Pradhan, M.; Pathak, S.; Mathur, D.; Ladiwala, U. Optically trapping tumor cells to assess differentiation and prognosis of cancers. Biomed. Opt. Express 2016, 7, 943. [Google Scholar] [CrossRef] [Green Version]
- Ai, Y.; Alali, H.; Pan, Y.; Videen, G.; Wang, C. Single-particle optical-trapping Raman spectroscopy for the detection and identification of aerosolized airborne biological particles. Meas. Sci. Technol. 2021, 32, 055207. [Google Scholar] [CrossRef]
- Wang, X.; Chen, S.; Kong, M.; Wang, Z.; Costa, K.D.; Li, R.A.; Sun, D. Enhanced cell sorting and manipulation with combined optical tweezer and microfluidic chip technologies. Lab Chip 2011, 11, 3656–3662. [Google Scholar] [CrossRef]
- Ti, C.; Ho-Thanh, M.T.; Wen, Q.; Liu, Y. Objective-lens-free fiber-based position detection with nanometer resolution in a fiber optical trapping system. Sci. Rep. 2017, 7, 1–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xie, L.; Liu, Q.; Shao, C.; Su, X. Differentiation of normal and leukemic cells by 2D light scattering label-free static cytometry. Opt. Express 2016, 24, 21700. [Google Scholar] [CrossRef] [PubMed]
- Redding, B.; Schwab, M.; Pan, Y.L. Raman Spectroscopy of Optically Trapped Single Biological Micro-Particles. Sensors 2015, 15, 19021–19046. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kalume, A.; Wang, C.; Pan, Y.L. Optical-Trapping Laser Techniques for Characterizing Airborne Aerosol Particles and Its Application in Chemical Aerosol Study. Micromachines 2021, 12, 466. [Google Scholar] [CrossRef]
- Lafratta, C.N. Optical tweezers for medical diagnostics. Anal. Bioanal. Chem. 2013, 405, 5671–5677. [Google Scholar] [CrossRef]
- Riesenberg, C.; Iriarte-Valdez, C.A.; Becker, A.; Dienerowitz, M.; Heisterkamp, A.; Ngezahayo, A.; Torres-Mapa, M.L. Probing ligand-receptor interaction in living cells using force measurements with optical tweezers. Front. Bioeng. Biotechnol. 2020, 8, 598459. [Google Scholar] [CrossRef]
- Lenton, I.C.D.; Volpe, G.; Stilgoe, A.B.; Nieminen, T.A.; Rubinsztein-Dunlop, H. Machine learning reveals complex behaviours in optically trapped particles. Mach. Learn. Sci. Technol. 2020, 1, 045009. [Google Scholar] [CrossRef]
- Grimm, M.; Franosch, T.; Jeney, S. High-resolution detection of Brownian motion for quantitative optical tweezers experiments. Phys. Rev. E 2012, 86, 021912. [Google Scholar] [CrossRef] [Green Version]
- Berg-Sørensen, K.; Flyvbjerg, H. Power spectrum analysis for optical tweezers. Rev. Sci. Instrum. 2004, 75, 594–612. [Google Scholar] [CrossRef] [Green Version]
- Pang, Y.; Gordon, R. Optical Trapping of 12 nm Dielectric Spheres Using Double-Nanoholes in a Gold Film. Nano Lett. 2011, 11, 3763–3767. [Google Scholar] [CrossRef] [PubMed]
- Pang, Y.; Gordon, R. Optical Trapping of a Single Protein. Nano Lett. 2011, 12, 402–406. [Google Scholar] [CrossRef] [PubMed]
- Ribeiro, R.S.R.; Soppera, O.; Oliva, A.G.; Guerreiro, A.; Jorge, P.A.S. New Trends on Optical Fiber Tweezers. J. Light. Technol. 2015, 33, 3394–3405. [Google Scholar] [CrossRef]
- Paiva, J.S.; Jorge, P.A.; Rosa, C.C.; Cunha, J.P. Optical fiber tips for biological applications: From light confinement, biosensing to bioparticles manipulation. Biochim. Biophys. Acta (BBA)—Gen. Subj. 2018, 1862, 1209–1246. [Google Scholar] [CrossRef] [PubMed]
- Paiva, J.S.; Jorge, P.A.S.; Ribeiro, R.S.R.; Balmaña, M.; Campos, D.; Mereiter, S.; Jin, C.; Karlsson, N.G.; Sampaio, P.; Reis, C.A.; et al. iLoF: An intelligent Lab on Fiber Approach for Human Cancer Single-Cell Type Identification. Sci. Rep. 2020, 10, 3171. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paiva, J.S. Intelligent Lab on Fiber Tools for Sensing Single-Cells and Extracellular Nano-Vesicles. Ph.D. Thesis, Faculdade de Ciências da Universidade do Porto, Porto, Portugal, 2019. [Google Scholar]
- Paiva, J.S.; Jorge, P.A.S.; Ribeiro, R.S.R.; Sampaio, P.; Rosa, C.C.; Cunha, J.P.S. Optical fiber-based sensing method for nanoparticle detection through supervised back-scattering analysis: A potential contributor for biomedicine. Int. J. Nanomed. 2019, 14, 2349–2369. [Google Scholar] [CrossRef] [Green Version]
- Neuman, K.C.; Block, S.M. Optical trapping. Rev. Sci. Instrum. 2004, 75, 2787–2809. [Google Scholar] [CrossRef] [PubMed]
- Jones, P.H.; Maragò, O.M.; Volpe, G. Optical Tweezers: Principles and Applications; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Bérut, A. Fluctuations and Interactions of Brownian Particles in Multiple Optical Traps. Ph.D. Thesis, Ecole Normale Supérieure de Lyon-ENS LYON, Lyon, France, 2015. [Google Scholar]
- Volpe, G.; Volpe, G. Simulation of a Brownian particle in an optical trap. Am. J. Phys. 2013, 81, 224–230. [Google Scholar] [CrossRef] [Green Version]
- Gieseler, J.; Gomez-Solano, J.R.; Magazzù, A.; Castillo, I.P.; García, L.P.; Gironella-Torrent, M.; Viader-Godoy, X.; Ritort, F.; Pesce, G.; Arzola, A.V.; et al. Optical tweezers—From calibration to applications: A tutorial. Adv. Opt. Photonics 2021, 13, 74–241. [Google Scholar] [CrossRef]
- Sarshar, M.; Wong, W.T.; Anvari, B. Comparative study of methods to calibrate the stiffness of a single-beam gradient-force optical tweezers over various laser trapping powers. J. Biomed. Opt. 2014, 19, 115001. [Google Scholar] [CrossRef] [Green Version]
- Appleyard, D.; Vandermeulen, K.; Lee, H.; Lang, M. Optical trapping for undergraduates. Am. J. Phys. 2007, 75, 5–14. [Google Scholar] [CrossRef] [Green Version]
- Allersma, M.W.; Gittes, F.; Decastro, M.J.; Stewart, R.J.; Schmidt, C.F. Two-Dimensional Tracking of ncd Motility by Back Focal Plane Interferometry. Biophys. J. 1998, 74, 1074–1085. [Google Scholar] [CrossRef] [Green Version]
- Gendal, L. Light Scattering Demystified: Theory and Practice; University of Copenhagen: Copenhagen, Denmark, 2017. [Google Scholar]
- Rowe, P.M.; Fergoda, M.; Neshyba, S. Temperature-Dependent Optical Properties of Liquid Water from 240 to 298 K. J. Geophys. Res. Atmos. 2020, 125. [Google Scholar] [CrossRef]
- Sultanova, N.; Kasarova, S.; Nikolov, I. Dispersion Properties of Optical Polymers. Acta Phys. Pol. A 2009, 116, 585–587. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Haddrell, A.; Rovelli, G.; Lewis, D.; Church, T.; Reid, J. Identifying time-dependent changes in the morphology of an individual aerosol particle from its light scattering pattern. Aerosol Sci. Technol. 2019, 53, 1334–1351. [Google Scholar] [CrossRef]
- Marsh, A.; Rovelli, G.; Miles, R.E.; Reid, J.P. Complexity of measuring and representing the hygroscopicity of mixed component aerosol. J. Phys. Chem. A 2019, 123, 1648–1660. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tabuchi, T.; Bando, K.; Kondo, S.; Tomita, H.; Shiobara, E.; Hayashi, H.; Kato, H.; Matsuura, Y.; Nakamura, A.; Kondo, K. Real time measurement of exact size and refractive index of particles in liquid by flow particle tracking method. In Proceedings of the 2018 International Symposium on Semiconductor Manufacturing (ISSM), Tokyo, Japan, 10–11 December 2018; pp. 1–4. [Google Scholar]
- Donoho, D.L. High-dimensional data analysis: The curses and blessings of dimensionality. AMS Math Chall. Lect. 2000, 1, 32. [Google Scholar]
- Lichtert, S.; Verbeeck, J. Statistical consequences of applying a PCA noise filter on EELS spectrum images. Ultramicroscopy 2013, 125, 35–42. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particle Type | Particle Size | Refractive Index (@976 nm) |
|---|---|---|
| Polystyrene | 3 m | |
| microspheres | 4 m | 1.5731 [32] |
| (PS) | 8 m | |
| Polymethyl | 3 m | |
| Methacrylate | 8 m | 1.4824 [32] |
| (PMMA) |
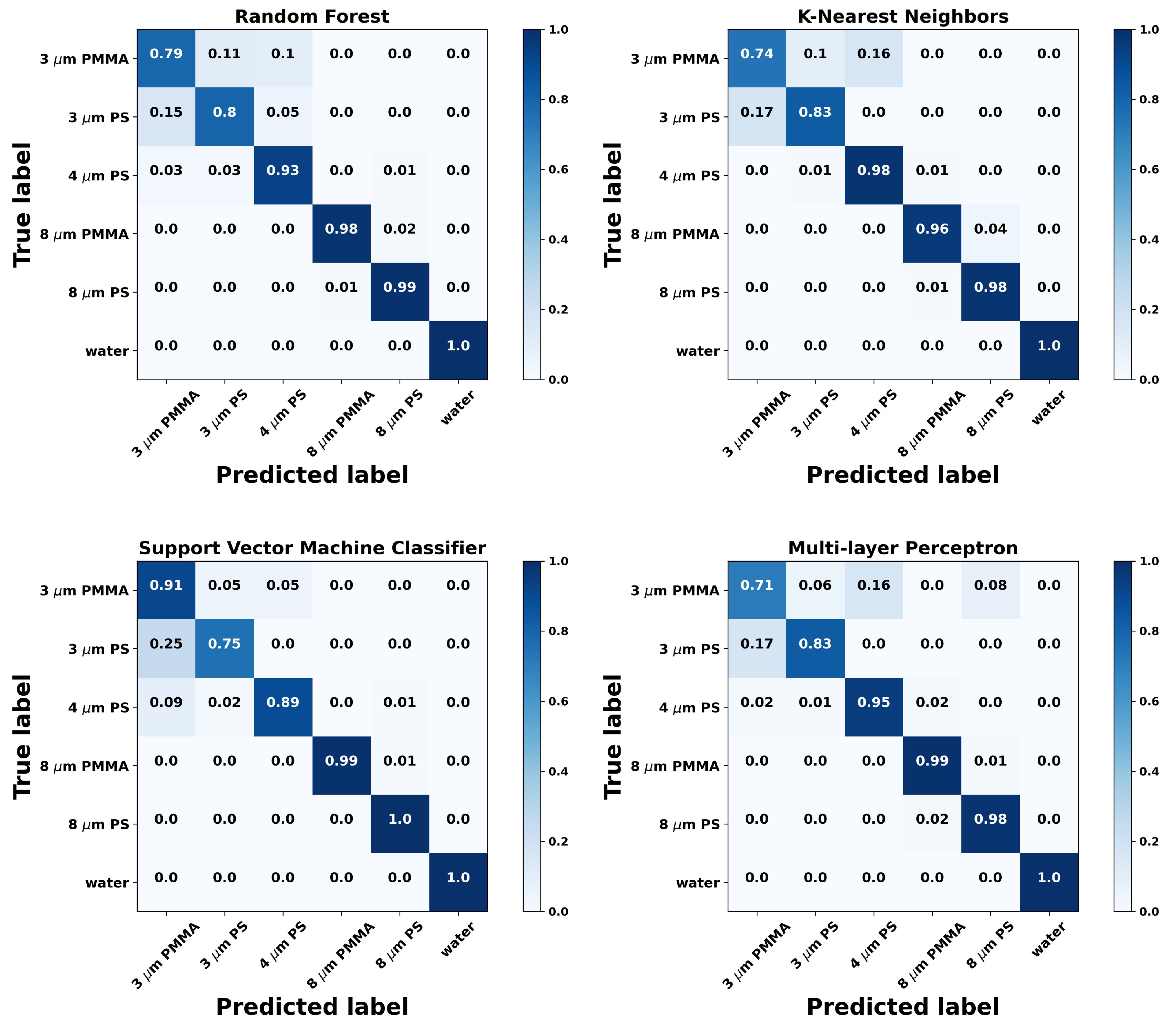
| Method | Accuracy—Test Dataset | ||
|---|---|---|---|
| Mean | Best | Worst | |
| Random Forests | 0.91 | 0.99 | 0.77 |
| Support Vector Machines | 0.92 | 0.98 | 0.74 |
| K-Nearest Neighbours | 0.91 | 0.99 | 0.77 |
| Multi-layer Perceptron | 0.91 | 0.99 | 0.69 |
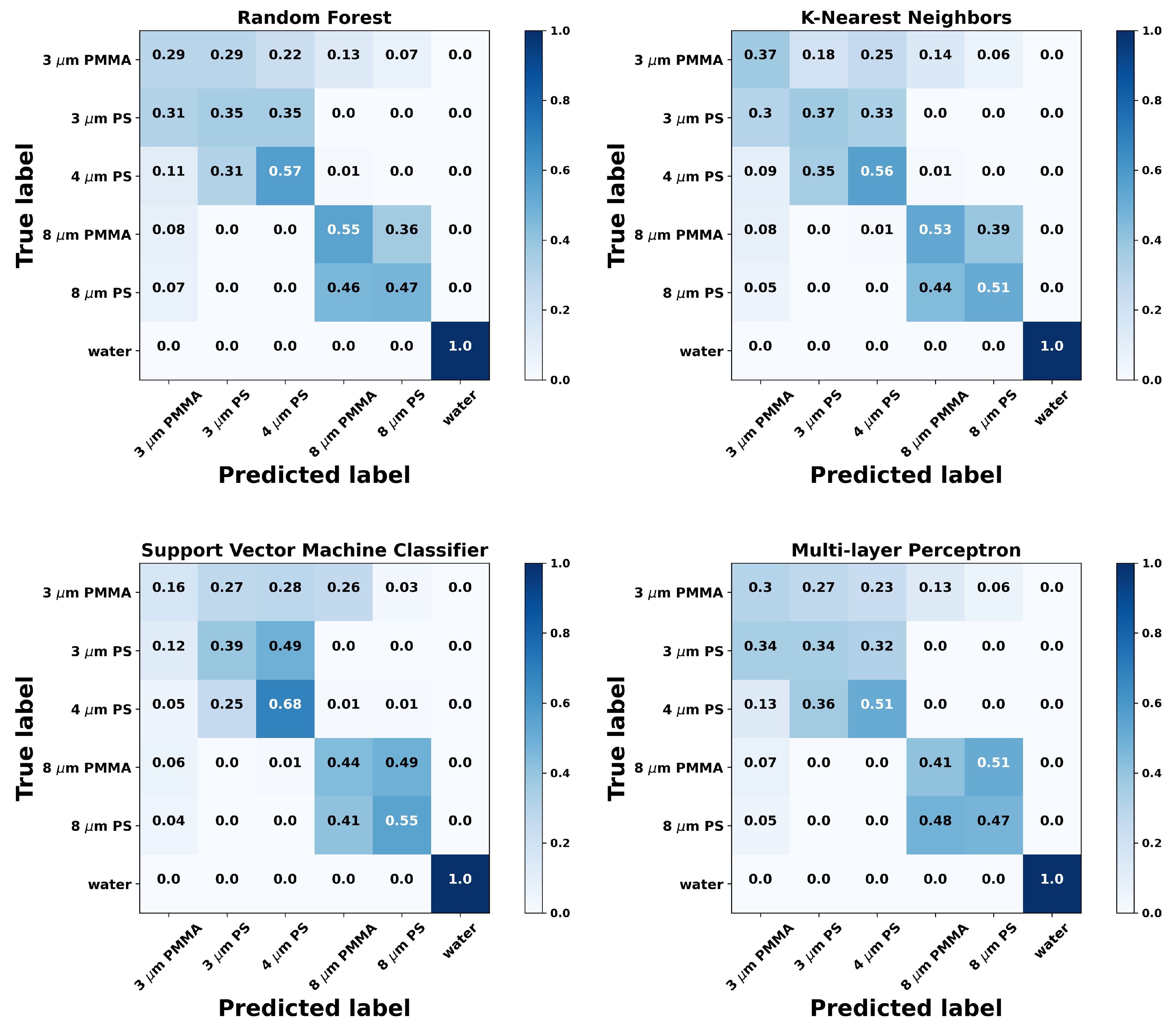
| Method | Accuracy—Test Dataset | ||
|---|---|---|---|
| Mean | Best | Worst | |
| Random Forests | 0.54 | 0.64 | 0.45 |
| Support Vector Machines | 0.53 | 0.64 | 0.42 |
| K-Nearest Neighbours | 0.55 | 0.67 | 0.44 |
| Multi-layer Perceptron | 0.49 | 0.61 | 0.41 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carvalho, I.A.; Silva, N.A.; Rosa, C.C.; Coelho, L.C.C.; Jorge, P.A.S. Particle Classification through the Analysis of the Forward Scattered Signal in Optical Tweezers. Sensors 2021, 21, 6181. https://doi.org/10.3390/s21186181
Carvalho IA, Silva NA, Rosa CC, Coelho LCC, Jorge PAS. Particle Classification through the Analysis of the Forward Scattered Signal in Optical Tweezers. Sensors. 2021; 21(18):6181. https://doi.org/10.3390/s21186181
Chicago/Turabian StyleCarvalho, Inês Alves, Nuno Azevedo Silva, Carla C. Rosa, Luís C. C. Coelho, and Pedro A. S. Jorge. 2021. "Particle Classification through the Analysis of the Forward Scattered Signal in Optical Tweezers" Sensors 21, no. 18: 6181. https://doi.org/10.3390/s21186181
APA StyleCarvalho, I. A., Silva, N. A., Rosa, C. C., Coelho, L. C. C., & Jorge, P. A. S. (2021). Particle Classification through the Analysis of the Forward Scattered Signal in Optical Tweezers. Sensors, 21(18), 6181. https://doi.org/10.3390/s21186181