
Proof of Concept Novel Configurable Chipless RFID Strain Sensor



Abstract
:1. Introduction
1.1. Introduction
1.1.1. Review of Existing and Proposed Sensor Designs
1.1.2. The Use of a Dedicated Substrate Material
- Sensing of strain on metallic or general conducting materials will require an intermediate material between the MUT and the resonator;
- It would be advantageous to have a consistent resonant response location in the RCS response which the use of a dedicated substrate would help achieve, as the dielectric MUT may have a significantly different permittivity [17];
- Certain dielectric materials have significant loss tangents [17] and the use of an intermediate dielectric could help mitigate its detrimental effects on the resonant response of the sensor;
- The strain performance of the sensor (sensitivity and range) can be tuned via the use of a specific substrate material and height;
- Significant levels of surface roughness and curvature of the MUT may cause difficulties in successfully/accurately depositing the resonator in place. A substrate material could help provide a smooth, flat surface for conductor deposition;
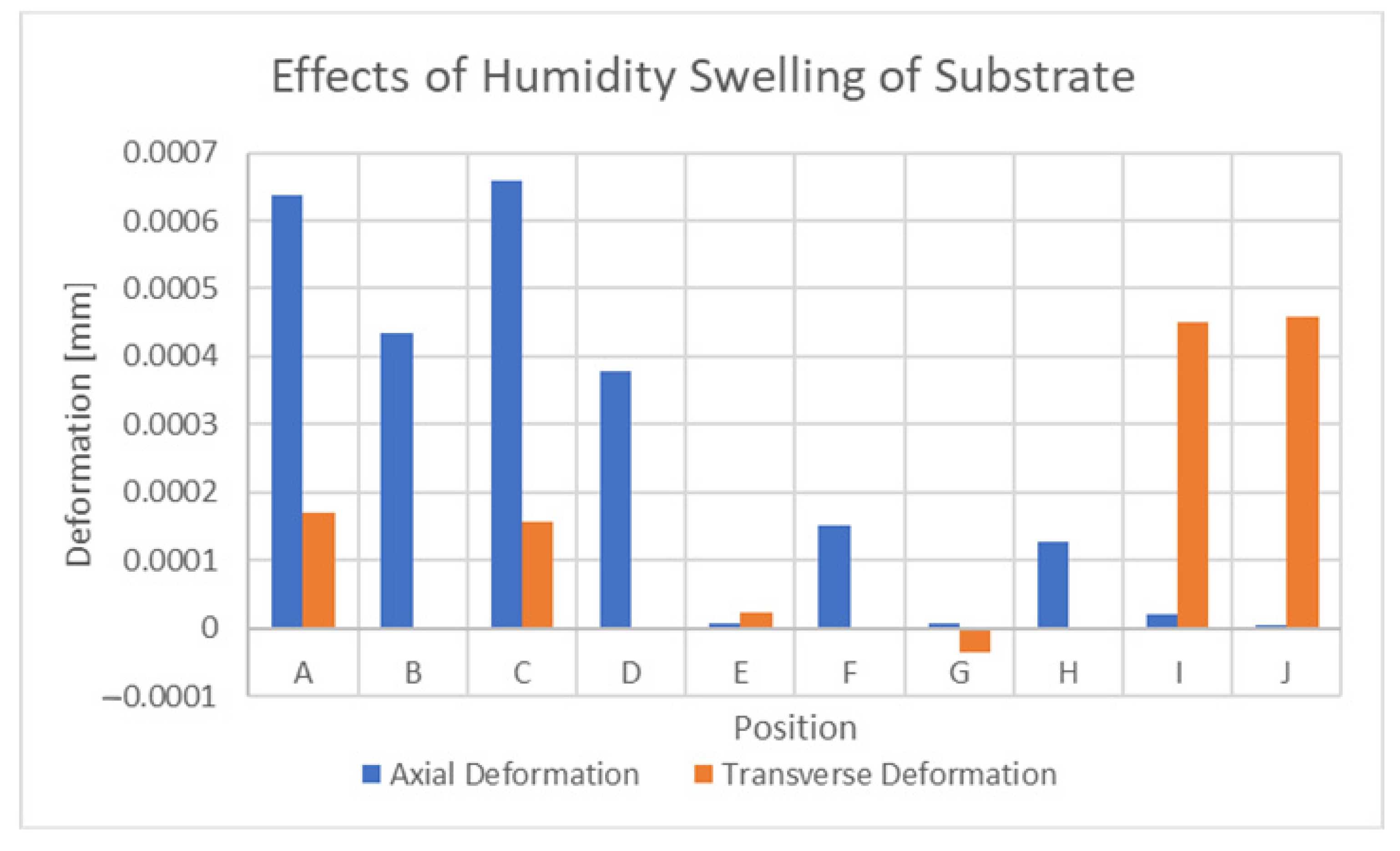
- This material could negatively impact the ability of the strain sensor to function. Examples of how this may occur include the effects of substrate swelling. This will become an issue of particular interest if the expansion coefficients of this material differ than that of the MUT, which is most likely going to be the case;
- Certain materials may readily absorb the strain induced within their bottom surface by the MUT and not successfully impart this deformation to the resonator on their top surface. This will most likely only be a concern for flexible substrate materials such as soft rubbers when the MUT is under low levels of strain. Although the substrate height can be altered, there will be limitations on the thickness resolution of easily deposited thin films;
- The choice of substrate material may not be freely within the sensor designer’s choice as the environment that the sensor will be used in may dictate the use of unfavorable materials;
1.1.3. Novel Sensor Design Goals
1.2. Sources of Strain Sensor Error
1.2.1. Cross-Sensitivity Issues in Chipless RFID Strain Sensors
1.2.2. General Orientation Issues in Chipless RFID Sensing
2. Materials and Methods
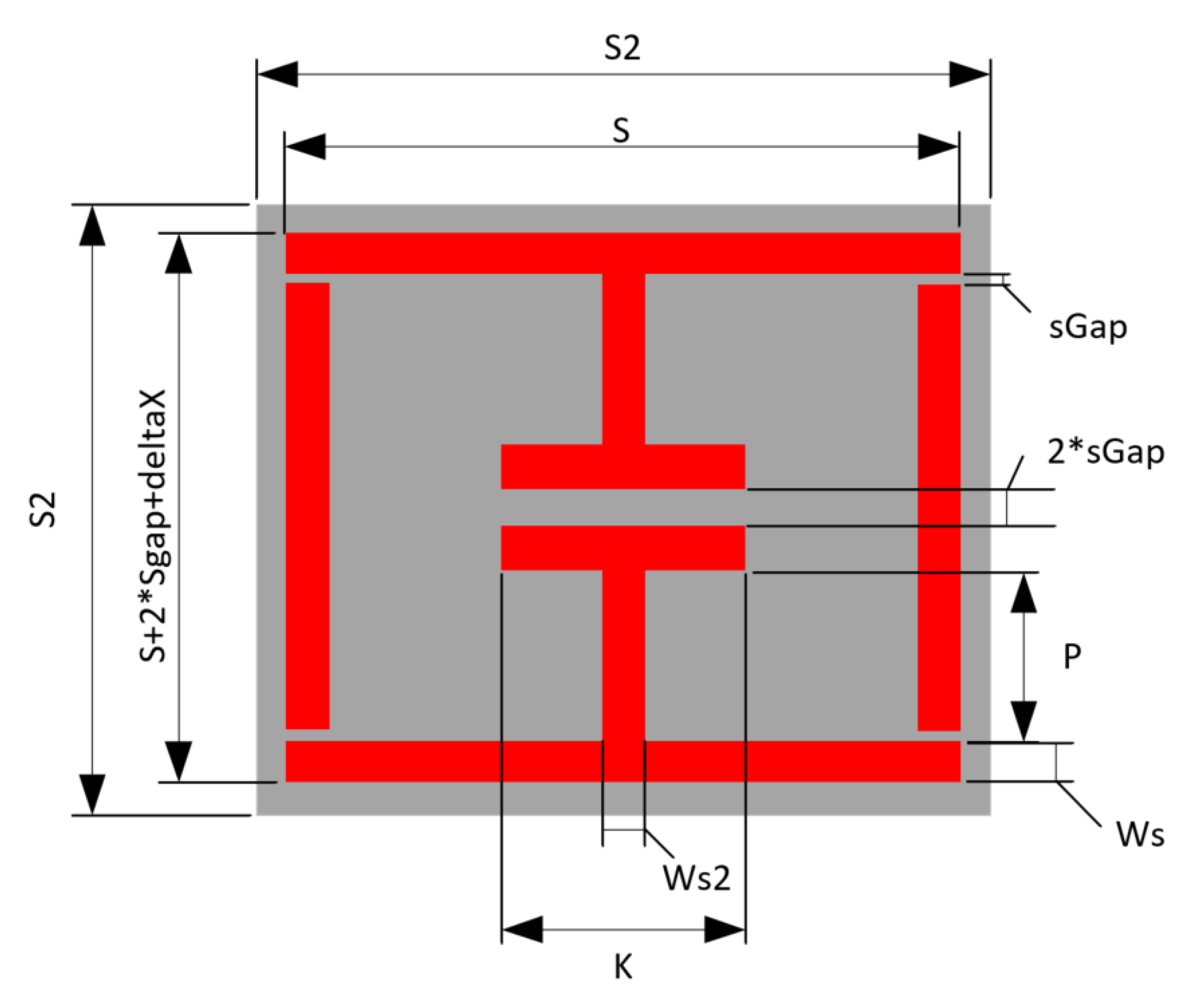
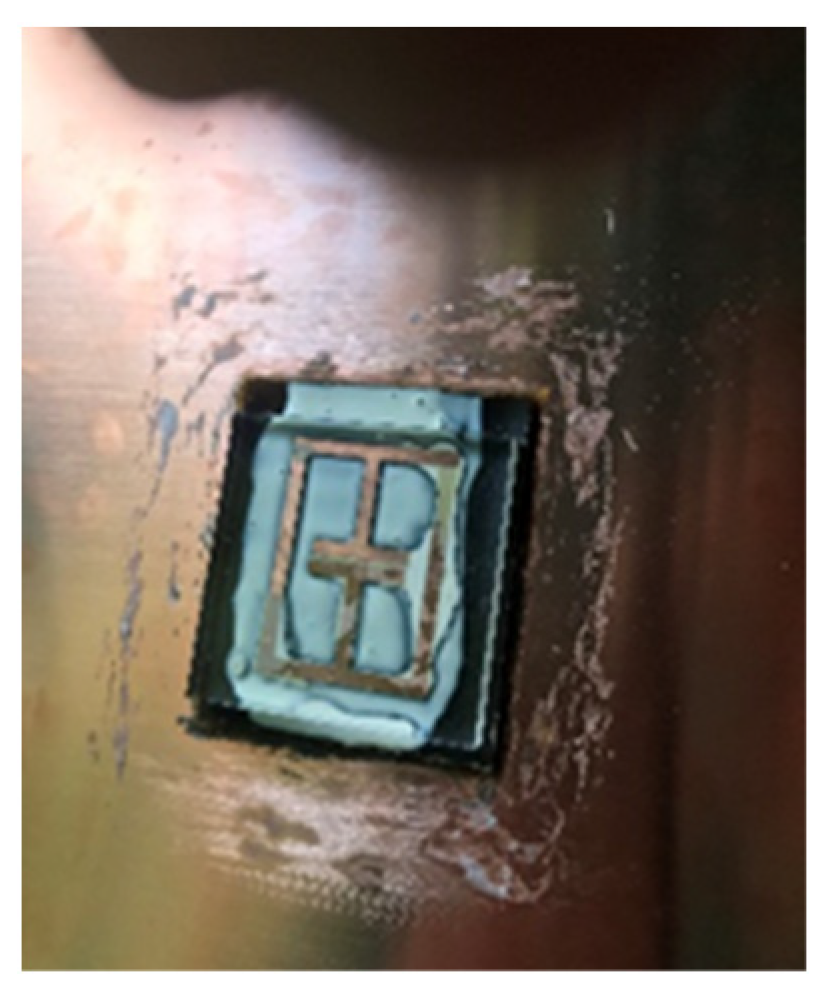
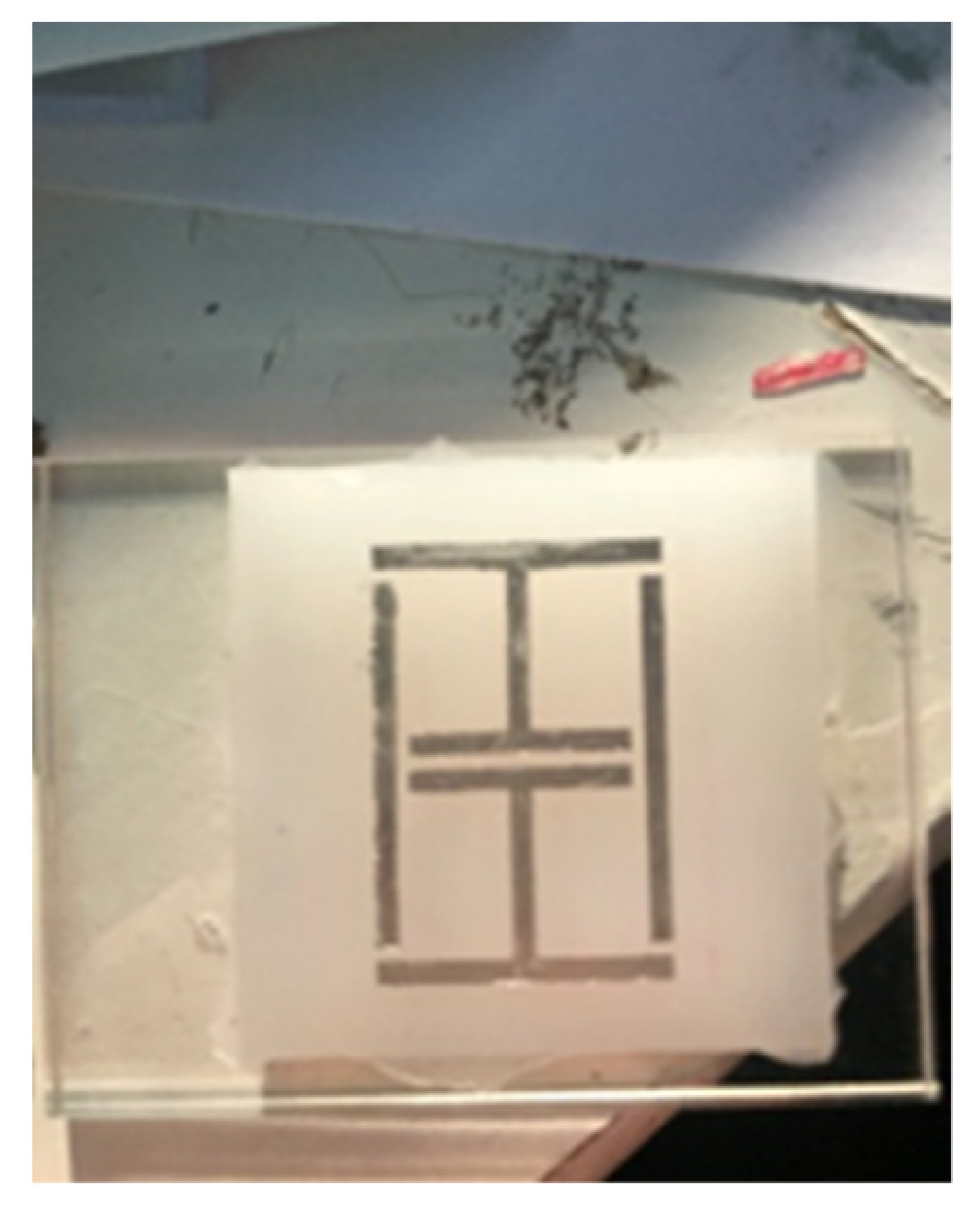
2.1. Sensor Implementation
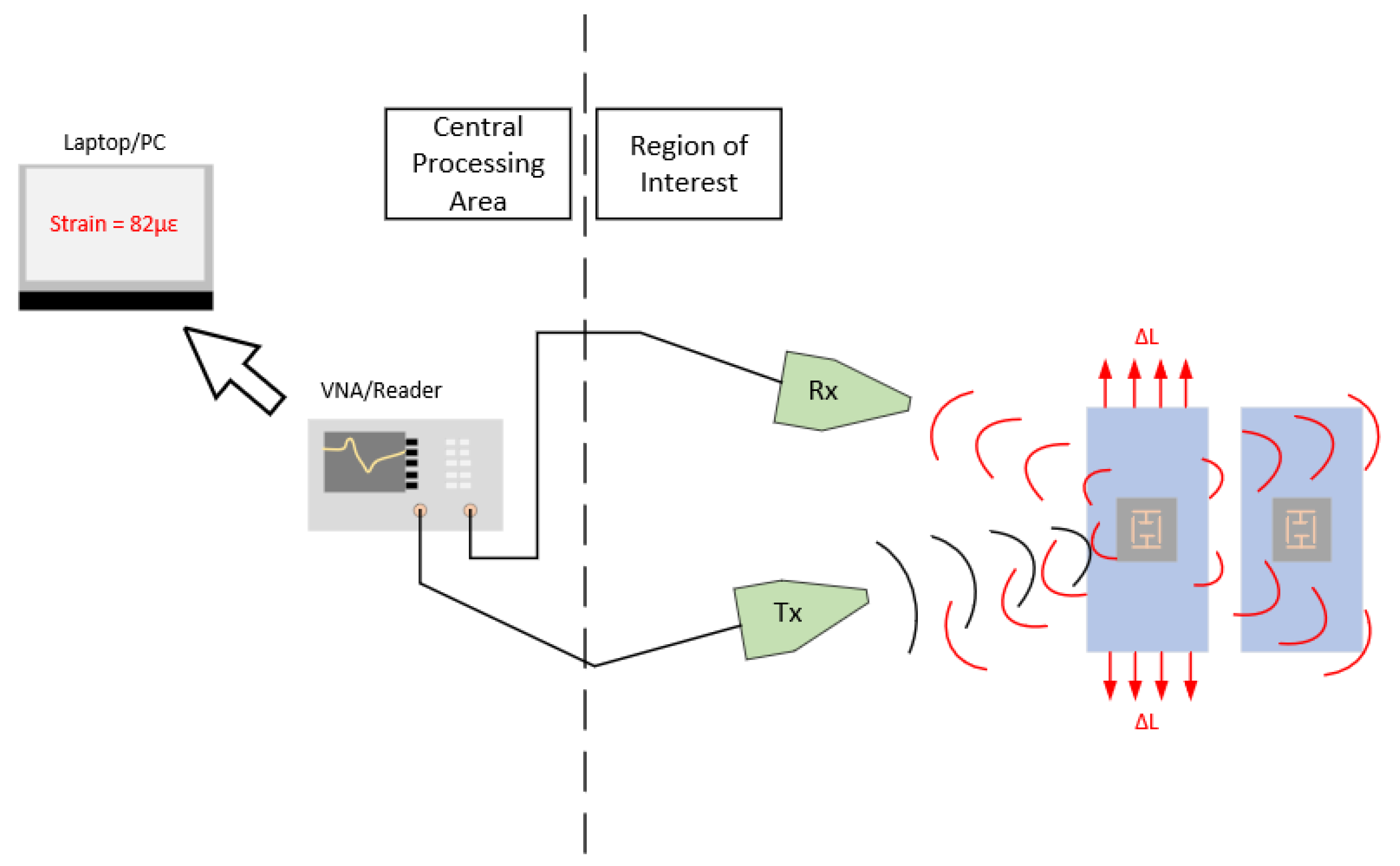
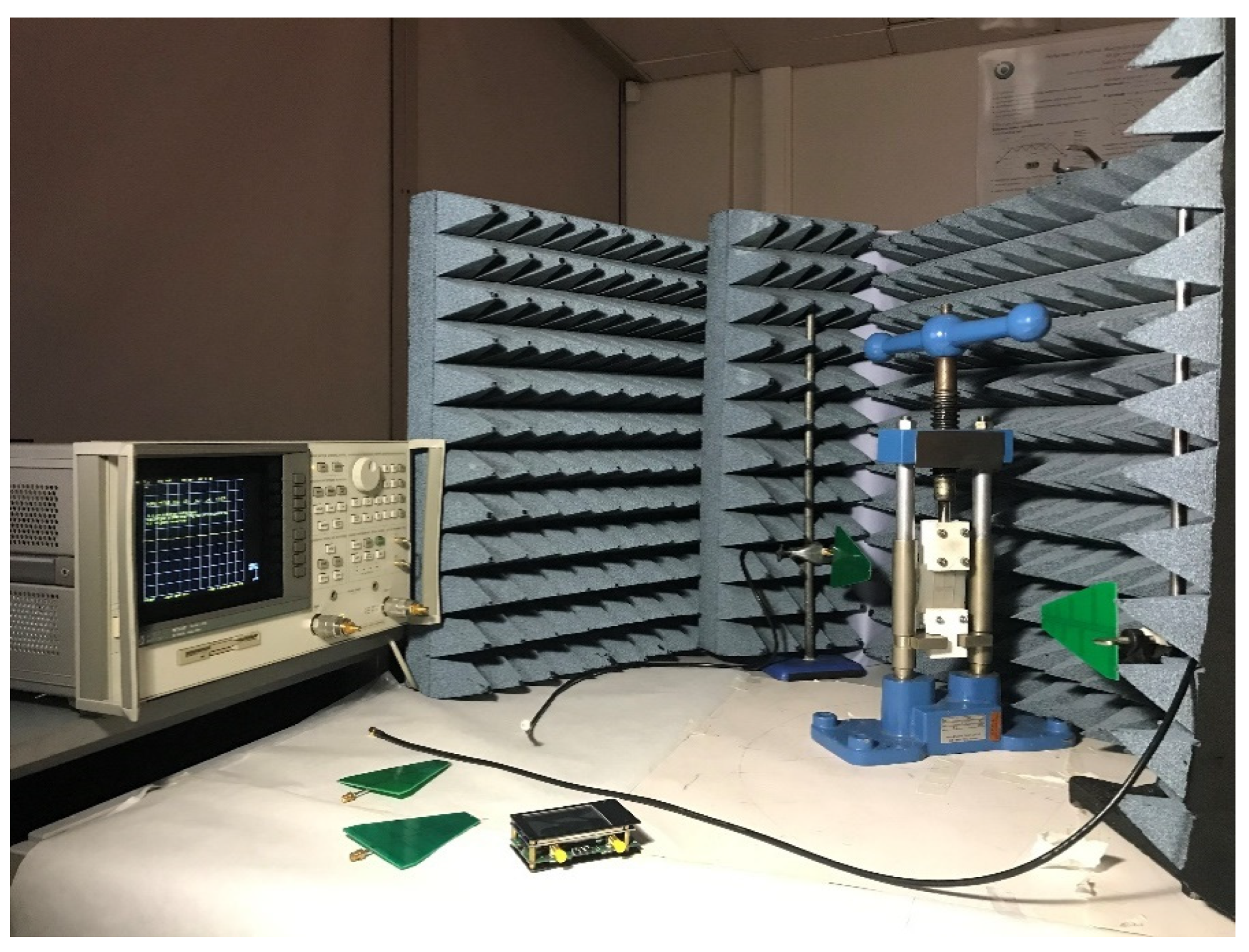
2.2. Test Setup
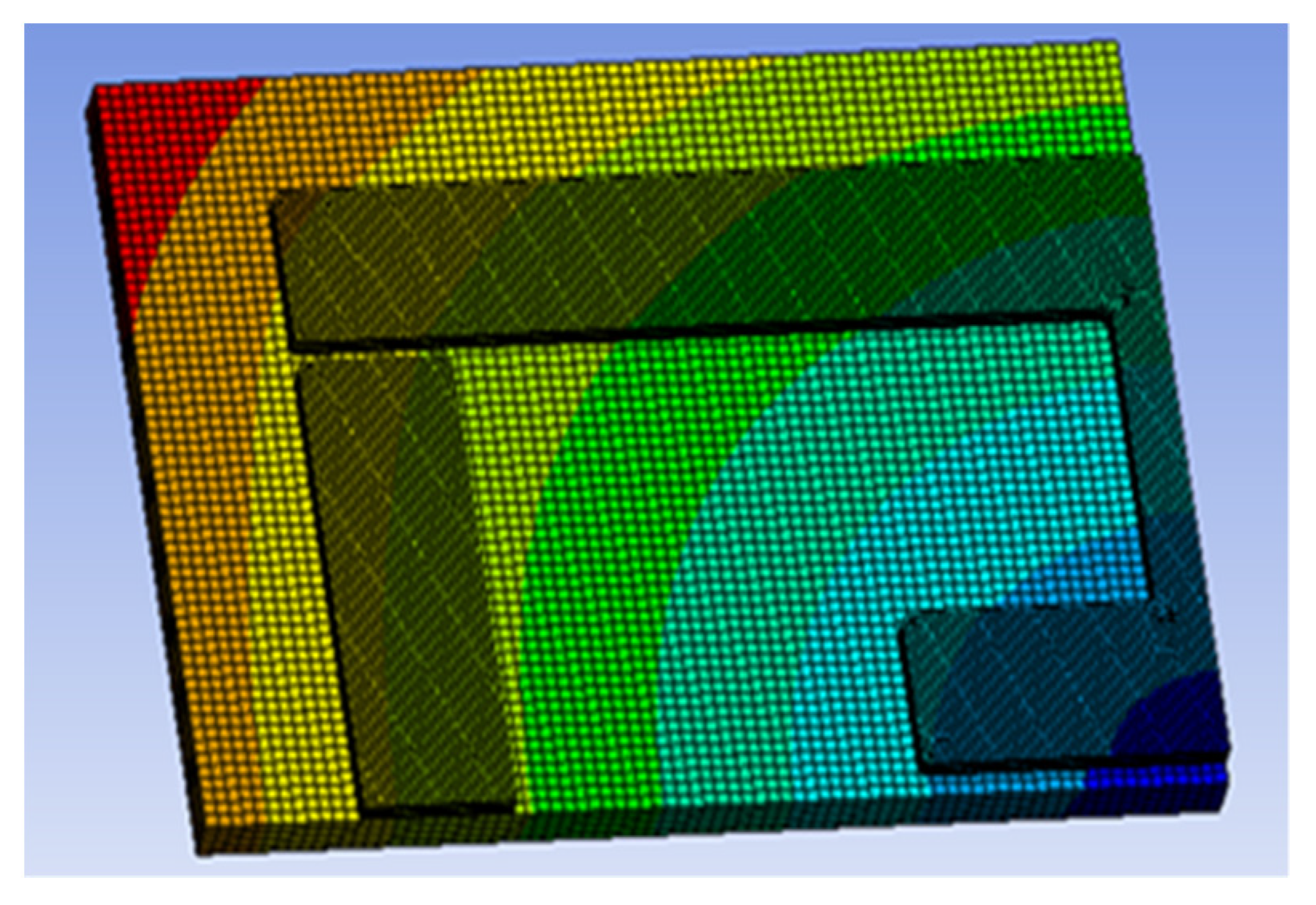
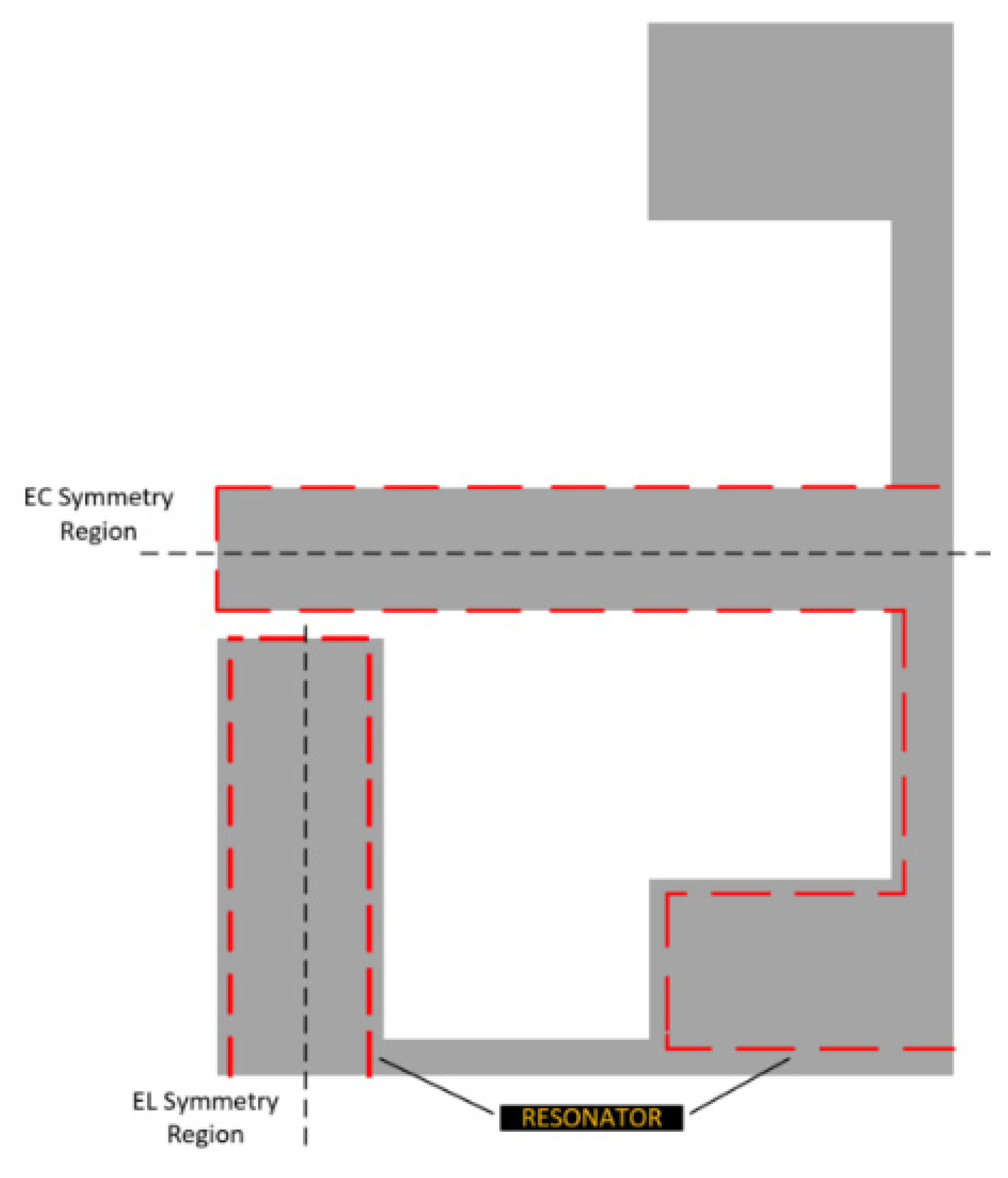
2.3. Modelling of Sensor
- The physical test results have clearly proven the strain sensing ability of this resonator when used with soft substrate materials;
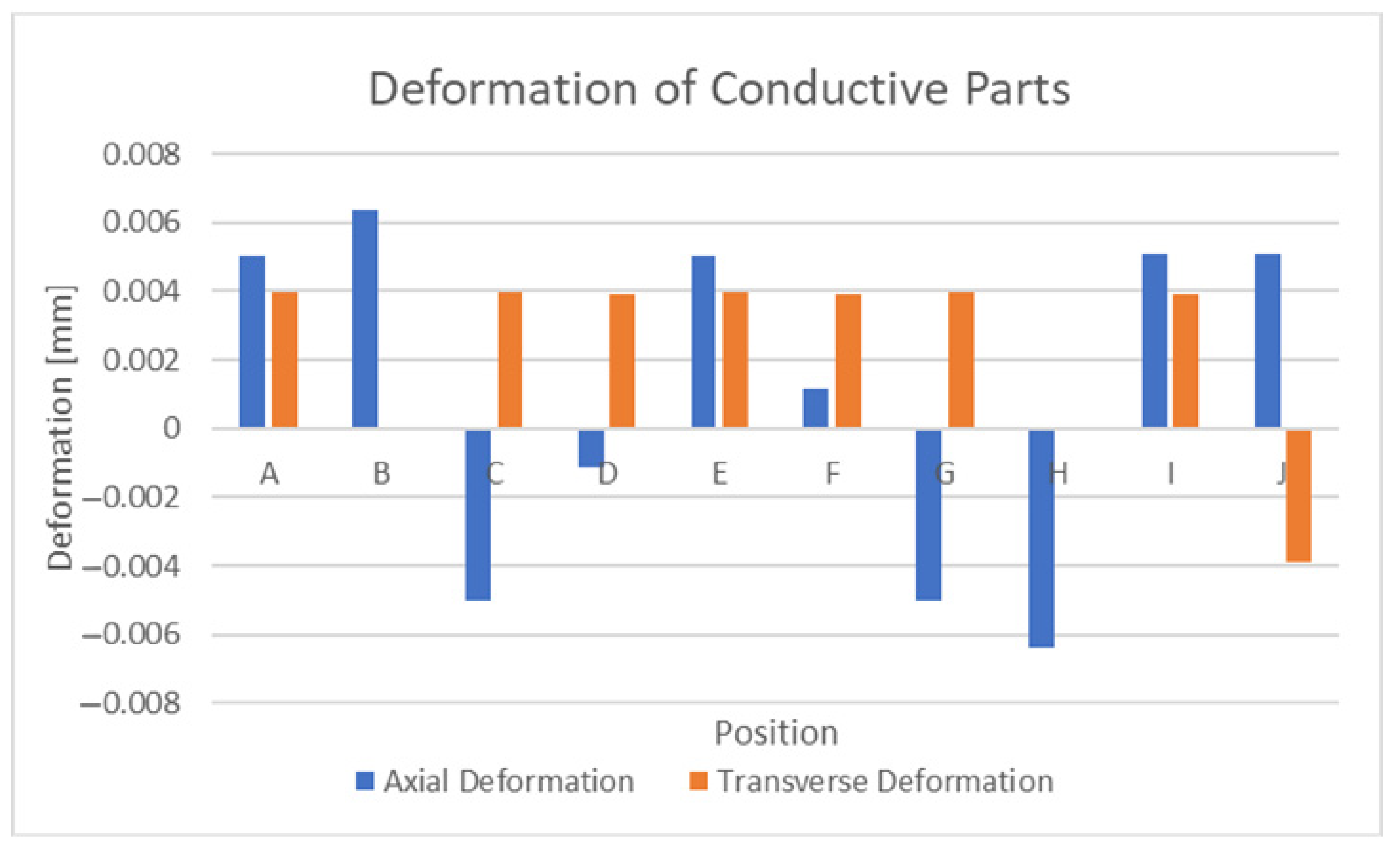
- As polyimide is much stiffer than rubber, the degree to which rigid body motion will occur in the operation of the sensor will undoubtably be reduced. Therefore, it is important to assess what contribution each deformation mechanism makes in the sensor operation;
- Stiffer substrates may benefit from additional, novel substrate modifications such as slots, etc. so that device sensitivity can be more specifically tailored;
- The performance of polyimides in aerospace settings has been well characterized and their cross-sensitivities have been explored extensively in literature.
3. Results and Discussion
3.1. Proof-of-Concept Sensor Testing
3.1.1. Electromagnetic Simulation Results
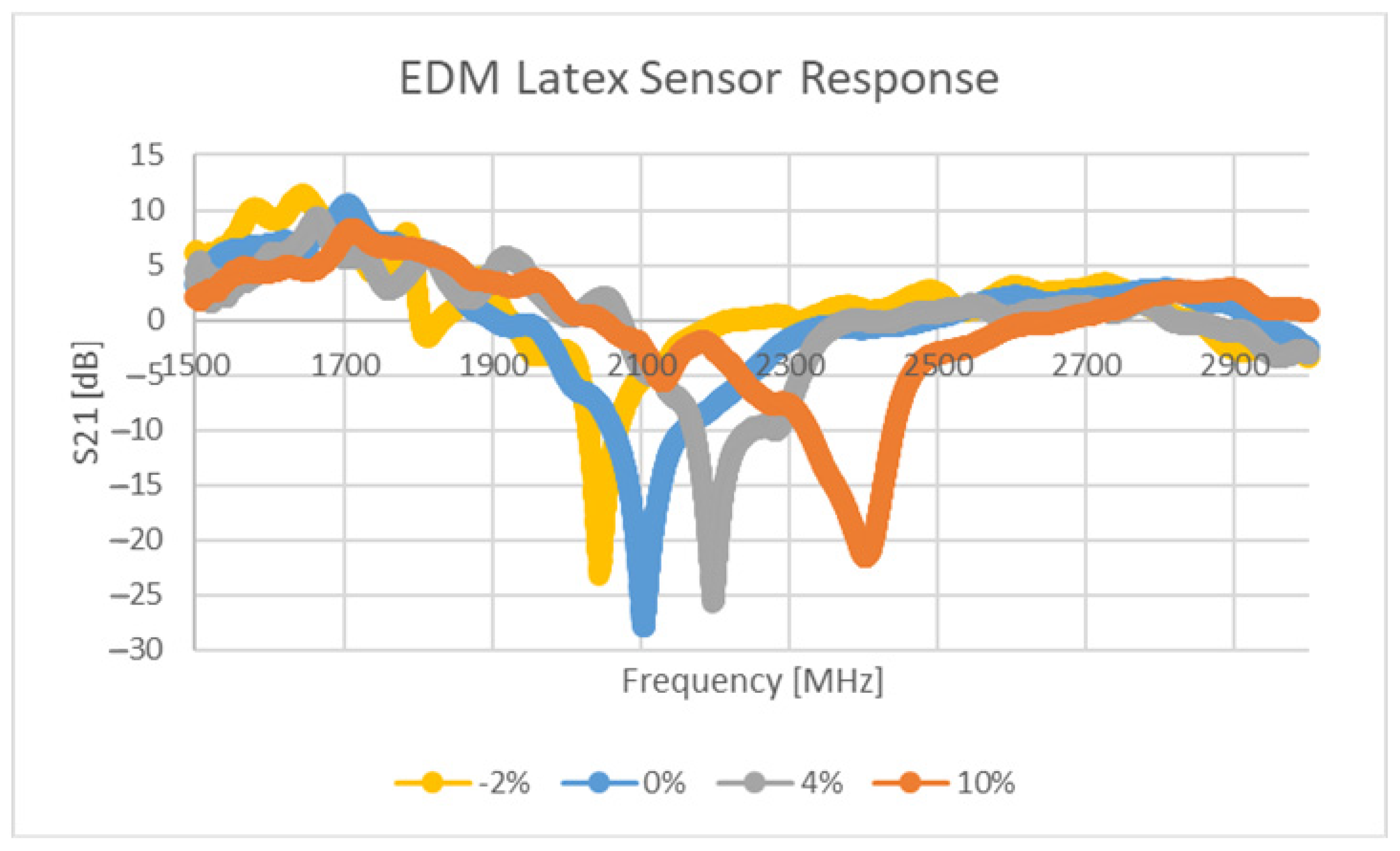
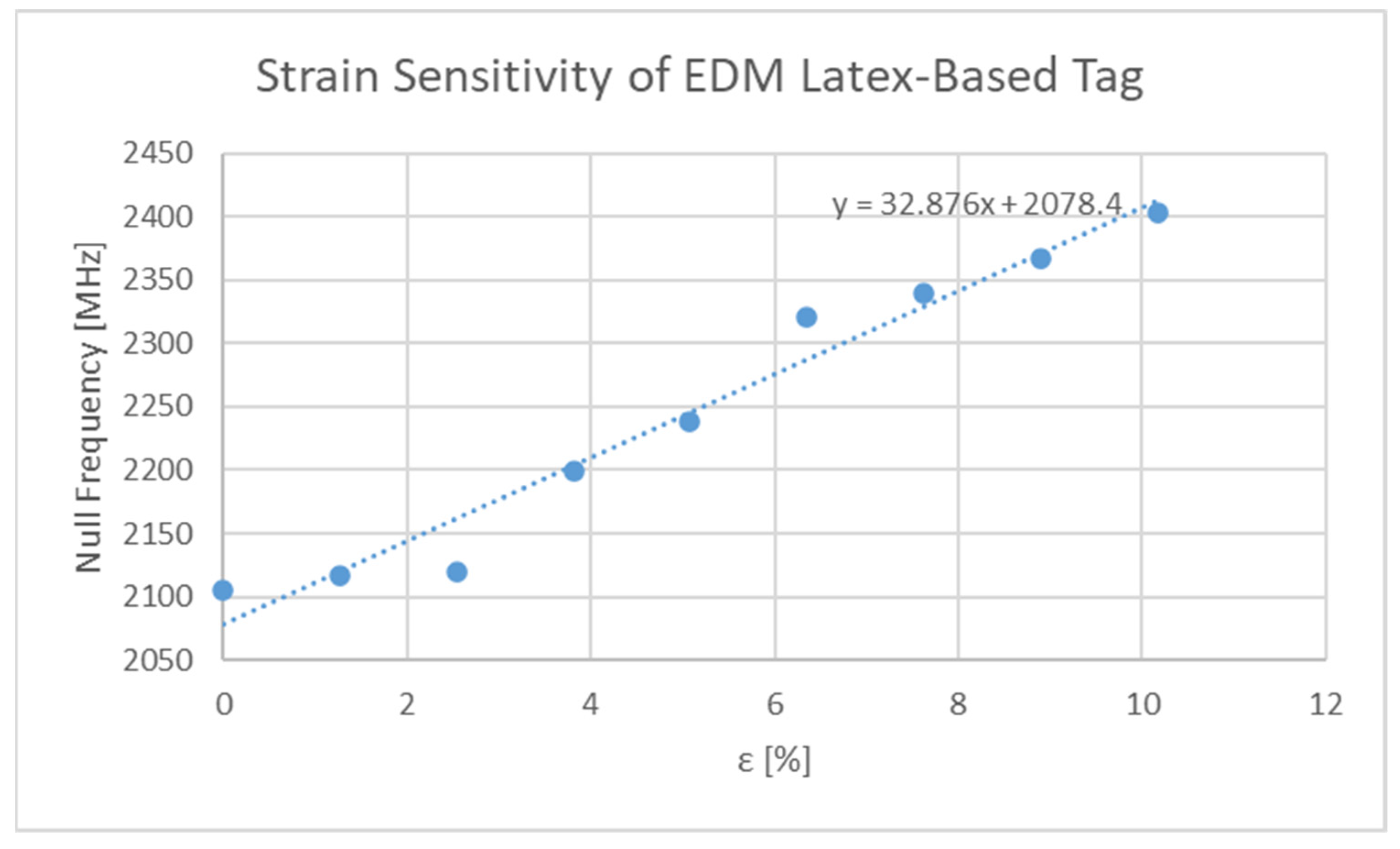
3.1.2. Physical Testing Results
3.1.3. Comparison with Other Works
3.2. Swelling and Orientation Analysis
3.2.1. Investigation into Thermal Effects
3.2.2. Investigation into Humidity Effects
3.2.3. Substrate Design Results
3.2.4. General Chipless RFID Tag/Sensor Orientation Challenges
3.2.5. Further Discussion
4. Conclusions
4.1. Overall Conclusions
4.2. Future Work
- Proof of concept strain sensing below 0.2% with this or an enhanced resonator design on a stiff substrate. This sensor should make use of the other deformation mechanisms that this work largely avoids;
- Sensor fabrication using an established, in-situ fabrication method that will support consistent electrical, thermal and mechanical sensor properties. Then, reliable physical testing should be performed with varying environmental conditions such as humidity and temperature;
- Full characterization of the performance of this sensor on dielectric and conducting superstrates below 0.2% strain;
- Exploration of design methods to mitigate/compensate for the possible transverse strain sensitivity of this current sensor design.
Author Contributions
Funding

Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ELC | Electric LC |
| AgNP | Silver nanoparticle |
| MWCNT | Multi Walled Carbon Nanotube |
| MLA | Meander Line Antenna |
| SRR | Split Ring Resonator |
| MUT | Material Under Test |
| EM | Electromagnetic |
| RCS | Radar Cross Section |
| REP | Resonant Electromagnetic Particle |
| EDM | Electro-Discharge Machining |
| FEA | Finite Element Analysis |
| CTE | Coefficient of Thermal Expansion |
| CHE | Coefficient of Hygroscopic Expansion |
References
- Mc Gee, K.; Anandarajah, P.; Collins, D. A Review of Chipless Remote Sensing Solutions Based on RFID Technology. Sensors 2019, 19, 4829. [Google Scholar] [CrossRef] [Green Version]
- Dong, T.; Kim, N.H. Cost-effectiveness of structural health monitoring in fuselage maintenance of the civil aviation industry. Aerospace 2018, 5, 87. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Huang, M.; Qian, L.; Zhao, B.; Wang, G. High-Altitude Balloon-Based Sensor System Design and Implementation. Sensors 2020, 20, 2080. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, J.; Zeng, X.; Luo, Y.; Cao, C.; Wang, T. Research on strain measurements of core positions for the Chinese space station. Sensors 2018, 18, 1834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amin, E.M.; Bhuiyan, M.S.; Karmakar, N.C.; Winther-Jensen, B. Development of a low cost printable chipless RFID humidity sensor. IEEE Sens. J. 2014, 14, 140–149. [Google Scholar] [CrossRef]
- Varshney, P.K.; Sharma, A.; Akhtar, M.J. Exploration of adulteration in some food materials using high-sensitivity configuration of electric-LC resonator sensor. Int. J. RF Microw. Comput. Eng. 2020, 30, 22045. [Google Scholar] [CrossRef]
- Melik, R.; Unal, E.; Perkgoz, N.K.; Puttlitz, C.; Demir, H.V. Metamaterial-based wireless strain sensors. Appl. Phys. Lett. 2009, 95, 011106. [Google Scholar] [CrossRef]
- Kim, J.; Wang, Z.; Kim, W.S. Stretchable RFID for wireless strain sensing with silver nano ink. IEEE Sens. J. 2014, 14, 4395–4401. [Google Scholar] [CrossRef]
- Teng, L.; Pan, K.; Nemitz, M.P.; Song, R.; Hu, Z.; Stokes, A.A. Soft Radio-Frequency Identification Sensors: Wireless Long-Range Strain Sensors Using Radio-Frequency Identification. Soft Robot. 2019, 6, 82–94. [Google Scholar] [CrossRef]
- Occhiuzzi, C.; Paggi, C.; Marrocco, G. Passive RFID strain-sensor based on meander-line antennas. IEEE Trans. Antennas Propag. 2011, 59, 4836–4840. [Google Scholar] [CrossRef] [Green Version]
- Min, S.-H.; Kim, H.-J.; Quan, Y.-J.; Kim, H.-S.; Lyu, J.-H.; Lee, G.-Y.; Ahn, S.-H. Stretchable chipless RFID multi-strain sensors using direct printing of aerosolised nanocomposite. Sens. Actuators A Phys. 2020, 313, 112224. [Google Scholar] [CrossRef]
- Daliri, A.; Galehdar, A.; John, S.; Wang, C.-H.; Rowe, W.; Ghorbani, K. Wireless strain measurement using circular microstrip patch antennas. Sens. Actuators A Phys. 2012, 184, 86–92. [Google Scholar] [CrossRef]
- Wan, G.; Kang, W.; Wang, C.; Li, W.; Li, M.; Xie, L.; Chen, L. Separating strain sensor based on dual-resonant circular patch antenna with chipless RFID tag. Smart Mater. Struct. 2021, 30, 015007. [Google Scholar] [CrossRef]
- Thai, T.T.; Aubert, H.; Pons, P.; Tentzeris, M.M.; Robert, P. Design of a highly sensitive wireless passive RF strain transducer. In Proceedings of the 2011 IEEE MTT-S International Microwave Symposium, Baltimore, MD, USA, 5–10 June 2011. [Google Scholar]
- Thai, T.T.; Aubert, H.; Pons, P.; Dejean, G.; Tentzeris, M.M.; Plana, R. Novel Design of a Highly Sensitive RF Strain Transducer for Passive and Remote Sensing in Two Dimensions. IEEE Trans. Microw. Theory Tech. 2013, 61, 1385–1396. [Google Scholar] [CrossRef]
- Chuang, J.; Thomson, D.; Bridges, G.E. Embeddable wireless strain sensor based on resonant rf cavities. Rev. Sci. Instrum. 2005, 76, 094703. [Google Scholar] [CrossRef]
- Pozar, D.M. Microwave Engineering, 4th ed.; Wiley: New York, NY, USA, 2012; p. 719. [Google Scholar]
- Wilson, W.C.; Juarez, P.D. Emerging Needs for Pervasive Passive Wireless Sensor Networks on Aerospace Vehicles. Procedia Comput. Sci. 2014, 37, 101–108. [Google Scholar] [CrossRef] [Green Version]
- García, I.; Zubia, J.; Durana, G.; Aldabaldetreku, G.; Illarramendi, M.A.; Villatoro, J. Optical Fiber Sensors for Aircraft Structural Health Monitoring. Sensors 2015, 15, 15494–15519. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sager, K.; Schroth, A.; Gerlach, G. Humidity-Induced Volume-Expansion of Polyimide Films. J. Intell. Mater. Syst. Struct. 1996, 7, 264–266. [Google Scholar] [CrossRef]
- Adamson, M.J. Thermal expansion and swelling of cured epoxy resin used in graphite/epoxy composite materials. J. Mater. Sci. 1980, 15, 1736–1745. [Google Scholar] [CrossRef]
- Sahputra, I.H.; Alexiadis, A.; Adams, M.J. Temperature dependence of the Young’s modulus of polymers calculated using a hybrid molecular mechanics–molecular dynamics method. J. Phys. Condens. Matter 2018, 30, 355901. [Google Scholar] [CrossRef]
- Huang, P.-Y.; Guo, Z.-S.; Feng, J.-M. General Model of Temperature-dependent Modulus and Yield Strength of Thermoplastic Polymers. Chin. J. Polym. Sci. 2019, 38, 382–393. [Google Scholar] [CrossRef]
- Hughes, E.J.; Rutherford, J.L. Determination of Mechanical Properties of Polymer Film Materials. 1975. Available online: https://ntrs.nasa.gov/citations/19760015291 (accessed on 28 July 2021).
- Sager, K.; Schroth, A.; Nakladal, A.; Gerlach, G. Humidity-dependent mechanical properties of polyimide films and their use for IC-compatible humidity sensors. Sens. Actuators A Phys. 1996, 53, 330–334. [Google Scholar] [CrossRef]
- Riddle, B.; Baker-Jarvis, J.; Krupka, J. Complex permittivity measurements of common plastics over variable temperatures. IEEE Trans. Microw. Theory Tech. 2003, 51, 727–733. [Google Scholar] [CrossRef]
- Ree, M.; Chen, K.; Kirby, D.P.; Katzenellenbogen, N.; Grischkowsky, D. Anisotropic properties of high-temperature polyimide thin films: Dielectric and thermal-expansion behaviors. J. Appl. Phys. 1992, 72, 2014–2021. [Google Scholar] [CrossRef]
- González, J.P.-P.; Lamure, A.; Senocq, F. Polyimide (PI) films by chemical vapor deposition (CVD): Novel design, experiments and characterization. Surf. Coat. Technol. 2007, 201, 9437–9441. [Google Scholar] [CrossRef] [Green Version]
- Tehrani, B.K.; Mariotti, C.; Cook, B.S.; Roselli, L.; Tentzeris, M.M. Development, characterization, and processing of thin and thick inkjet-printed dielectric films. Org. Electron. 2016, 29, 135–141. [Google Scholar] [CrossRef] [Green Version]
- Yoo, S.; Byun, G.; Choo, H. Design of Microstrip Patch Antennas with Parasitic Elements for Minimized Polarization Mismatch; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016; pp. 1845–1846. [Google Scholar]
- Byun, G.; Choo, H. Antenna polarisation adjustment for microstrip patch antennas using parasitic elements. Electron. Lett. 2015, 51, 1046–1048. [Google Scholar] [CrossRef] [Green Version]
- De Alencar, R.T.; Barbot, N.; Garbati, M.; Perret, E. Characterization of Chipless RFID Tag in a 3-Dimensional Reading Zone. In Proceedings of the 2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting, Atlanta, GA, USA, 7–12 July 2019. [Google Scholar]
- Barbot, N.; Rance, O.; Perret, E. Chipless RFID Reading Method Insensitive to Tag Orientation. IEEE Trans. Antennas Propag. 2021, 69, 2896–2902. [Google Scholar] [CrossRef]
- Fathi, P.; Aliasgari, J.; Babaeian, F.; Karmakar, N.C.; Bhattacharya, M.; Bhattacharya, S. Chipless RFID Tags: Co- or Cross-Polar Tag? In Proceedings of the 2019 IEEE Asia-Pacific Microwave Conference (APMC), Marina Bay Sands, Singapore, 10–13 December 2019; pp. 117–119. [Google Scholar]
- Genovesi, S.; Costa, F.; Dicandia, F.A.; Borgese, M.; Manara, G. Orientation-Insensitive and Normalization-Free Reading Chipless RFID System Based on Circular Polarization Interrogation. IEEE Trans. Antennas Propag. 2019, 68, 2370–2378. [Google Scholar] [CrossRef]
- Vena, A.; Babar, A.A.; Sydänheimo, L.; Tentzeris, M.M.; Ukkonen, L. A Novel Near-Transparent ASK-Reconfigurable Inkjet-Printed Chipless RFID Tag. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 753–756. [Google Scholar] [CrossRef]
- Alam, J.; Khaliel, M.; Fawky, A.; El-Awamry, A.; Kaiser, T. Frequency-Coded Chipless RFID Tags: Notch Model, Detection, Angular Orientation, and Coverage Measurements. Sensors 2020, 20, 1843. [Google Scholar] [CrossRef] [Green Version]
- RS PRO Conductive Paint, 5g|RS Components. 2021. Available online: https://ie.rs-online.com/web/p/adhesives/1239911/ (accessed on 28 July 2021).
- EcoflexTM 00-30 Product Information|Smooth-On, Inc. Available online: https://www.smooth-on.com/products/ecoflex-00-30/ (accessed on 29 July 2021).
- Products-Isopon Fastglas. Available online: https://www.isopon.com/aus/en-aus/product/isopon/fastglas/multi-purpose/resin (accessed on 28 July 2021).
- Fawky Megahed, A. Realistic Chipless RFID: Identification and Localization. University of Duisburg-Essen. 2016. Available online: https://duepublico2.uni-due.de/servlets/MCRFileNodeServlet/duepublico_derivate_00044321/Megahed_Diss.pdf (accessed on 1 July 2021).
- Mc Gee, K.; Anandarajah, P.; Collins, D. Current Progress towards the Integration of Thermocouple and Chipless RFID Technologies and the Sensing of a Dynamic Stimulus. Micromachines 2020, 11, 1019. [Google Scholar] [CrossRef]
- Babaeian, F.; Karmakar, N.C. Time and Frequency Domains Analysis of Chipless RFID Back-Scattered Tag Reflection. IoT 2020, 1, 7. [Google Scholar] [CrossRef]
- Kalansuriya, P.; Karmakar, N.; Viterbo, E. On the Detection of Frequency-Spectra-Based Chipless RFID Using UWB Impulsed Interrogation. IEEE Trans. Microw. Theory Tech. 2012, 60, 4187–4197. [Google Scholar] [CrossRef] [Green Version]
- Ansoft. Ansys HFSS|3D High Frequency Simulation Software. Available online: https://www.ansys.com/products/electronics/ansys-hfss (accessed on 28 July 2021).
- Ansoft. Ansys Mechanical|Structural FEA Analysis Software. Available online: https://www.ansys.com/products/structures/ansys-mechanical (accessed on 28 July 2021).
- MacDonald, B.J. Practical Stress Analysis with Finite Elements, 2nd ed.; Glasnevin Publishing: Dublin, Ireland, 2013. [Google Scholar]
- Huerta, E.; Oliva, A.I.; Avilés, F.; González-Hernández, J.; Corona, J.E. Elastic Modulus Determination of Al-Cu Film Alloys Prepared by Thermal Diffusion. J. Nanomater. 2012, 2012, 895131. [Google Scholar] [CrossRef]
- Dharmadasa, B.Y.; McCallum, M.; Jimenez, F.L. Characterizing and modeling the viscoplastic behavior of creases in Kapton polyimide films. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Bidstrup, S.A.; Hodge, T.C.; Lin, L.; Kohl, P.A.; Lee, J.; Allen, M.G. Anisotropy in Thermal, Electrical and Mechanical Properties of Spin-Coated Polymer Dielectrics. In MRS Online Proceedings Library; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 1994; Volume 338, pp. 577–587. [Google Scholar]
- Elsner, G.; Kempf, J.; Bartha, J.; Wagner, H. Anisotropy of thermal expansion of thin polyimide films. Thin Solid Films 1990, 185, 189–197. [Google Scholar] [CrossRef]
- Polyimide Films|DuPont. Available online: https://www.dupont.com/electronic-materials/polyimide-films.html/general/H-38479-4.pdf (accessed on 28 July 2021).
- Marindra, A.M.J.; Tian, G.Y. Chipless RFID Sensor Tag for Metal Crack Detection and Characterization. IEEE Trans. Microw. Theory Tech. 2018, 66, 2452–2462. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Name | Known Dependencies | Comment |
|---|---|---|
| Axial Strain | Axial deformation, Transverse strain (due to Poisson’s effect), material models | This variable is designed to be the dominant contributing variable to the sensor response. Where this is not possible, compensation will be required |
| Transverse Strain | Transverse deformation, substrate transverse expansion, conductor transverse expansion, material models | This variable should be mitigated against within the design or through compensation within the overall sensor implementation, as seen in Reference [11] |
| Substrate Expansion/Contraction | Thermal expansion, humidity-based swelling | Polyimides and other substrate materials of interest suffer from significant levels of humidity and/or thermal-based expansion [20,21] |
| Conductor Expansion/Contraction/Material Loss | Thermal expansion, corrosion, material models | This parameter is perhaps one of the more difficult variables to mitigate against. This variable can be reversable or irreversible as corrosion and creep can cause permanent expansion/contraction. |
| Conductor Resistance | Temperature, corrosion | Conductor resistance influences the Q-factor of chipless RFID tags. Certain resonant elements will also exhibit changes in null frequency. Corrosion could result in a complex change in resistance, caused by material loss and by surface oxidation |
| Structural material Models | Temperature, pressure, humidity | These models vary from simple isotropic elasticity models to more complex models that include effects such as creep. Most if not all these models contain properties that are sensitive to temperature [22,23,24] and other environmental parameters [25] |
| Dielectric Material Model | Temperature, humidity, pressure | Properties described by this model consist of dielectric constant(permittivity) and loss tangent. These parameters can be highly sensitive to environmental effects within a variety of dielectric materials [26,27] |
| Variable | Value [mm] | Variable | Value [mm] |
|---|---|---|---|
| S2 | 50 | Ws | 2 |
| S | 24 | Ws2 | 2 |
| sGap | 1 | K | 19 |
| H_ecoflex | 5.5 | P | 14 |
| H_glove | <0.2 | deltaX | 10 |
| Variable | Value [mm] | Variable | Value [mm] |
|---|---|---|---|
| S2 | 76 | Ws | 2 |
| S | 24 | Ws2 | 2 |
| sGap | 1 | K | 19 |
| H_substrate | 3 | P | 14 |
| H_resonator | 0.3 | deltaX | 10 |
| Variable | Value [mm] | Variable | Value [mm] |
|---|---|---|---|
| S2 | 50 | Ws | 2.5 |
| S | 30 | Ws2 | 2.5 |
| sGap | <0.2 | K | 17 |
| H | 5 | P | 15 |
| H_resonator | <0.3 | deltaX | 5 |
| Material | Young’s Modulus | Poisson’s Ratio | Coefficient of Thermal Expansion | Thermal Conductivity |
|---|---|---|---|---|
| Polyimide [52,53] | 2.5 GPa | 0.34 | 0.0001 C−1 | 0.12 Wm−1 C−1 |
| Copper | 125 GPa | 0.345 | 0.0000168 C−1 | 385 Wm−1 C−1 |
| Variable | Value [mm] | Variable | Value [mm] |
|---|---|---|---|
| S2 | 40 | Ws | 2 |
| S | 34 | Ws2 | 3 |
| sGap | 0.4 | K | 12 |
| H | 0.5 | P | 6 |
| H_resonator | 0.05 | deltaX | −10 |
| Publication | Base Frequency [MHz] | Sensitivity [MHz/%ε] | Max Tested Stimulus [%] | Gauge Factor | Year |
|---|---|---|---|---|---|
| This Work | 2100 | 32.88 | 10 | 1.57 | 2021 |
| [11] | 1550 | −14 | 25 | 0.9 | 2020 |
| [8] | 1610 | 8.05 | 4 | 0.5 | 2014 |
| [12] | 1530 | −13.68 | 0.05 | 0.89 | 2012 |
| [7] | 12,250 | 51.48 | 0.2 | 0.42 | 2009 |
| [9] | 860 | −1.2 | 50 | 0.14 | 2019 |
| [15] | 3300 | 85 | 0.9 | 2.58 | 2013 |
| [14] | 2900 | 36.56 | 1.65 | 1.26 | 2011 |
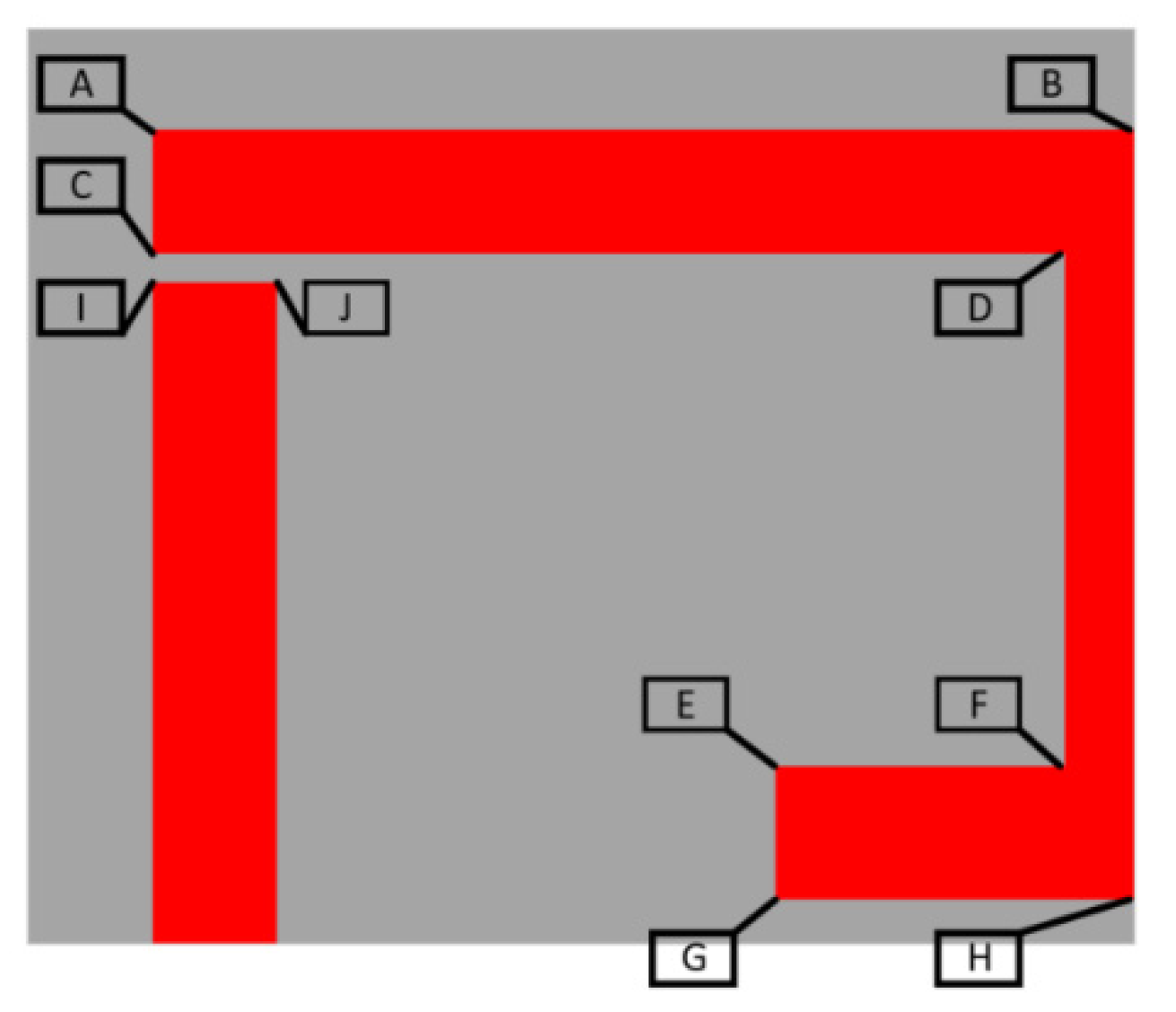
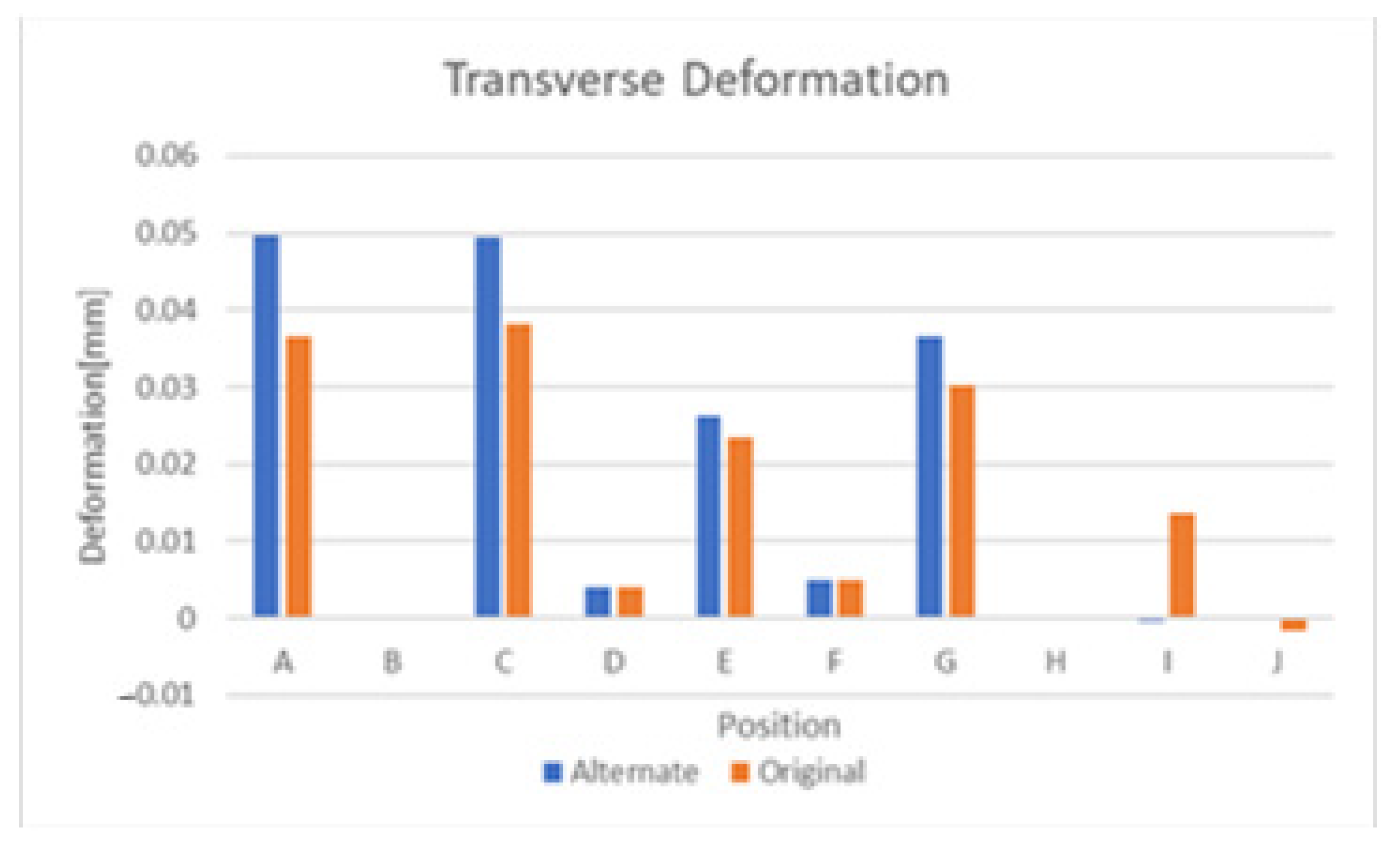
| Setup | A | B | C | D | E | F | G | H | I | J |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.05 mm Axial Def. | 0.0246 | 0.0234 | 0.0249 | 0.022 | 0.055 | 0.014 | 0.0058 | 0.0128 | 0.0039 | 0.0053 |
| 350 °C Thermal Def. | 0.074 | 0.0728 | 0.0576 | 0.055 | 0.020 | 0.023 | 0.032 | 0.0481 | 0.0515 | 0.0498 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mc Gee, K.; Anandarajah, P.; Collins, D. Proof of Concept Novel Configurable Chipless RFID Strain Sensor. Sensors 2021, 21, 6224. https://doi.org/10.3390/s21186224
Mc Gee K, Anandarajah P, Collins D. Proof of Concept Novel Configurable Chipless RFID Strain Sensor. Sensors. 2021; 21(18):6224. https://doi.org/10.3390/s21186224
Chicago/Turabian StyleMc Gee, Kevin, Prince Anandarajah, and David Collins. 2021. "Proof of Concept Novel Configurable Chipless RFID Strain Sensor" Sensors 21, no. 18: 6224. https://doi.org/10.3390/s21186224
APA StyleMc Gee, K., Anandarajah, P., & Collins, D. (2021). Proof of Concept Novel Configurable Chipless RFID Strain Sensor. Sensors, 21(18), 6224. https://doi.org/10.3390/s21186224