
A Flexible Single Loop Setup for Water-Borne Transient Electromagnetic Sounding Applications




Abstract
:1. Introduction
2. Materials and Methods
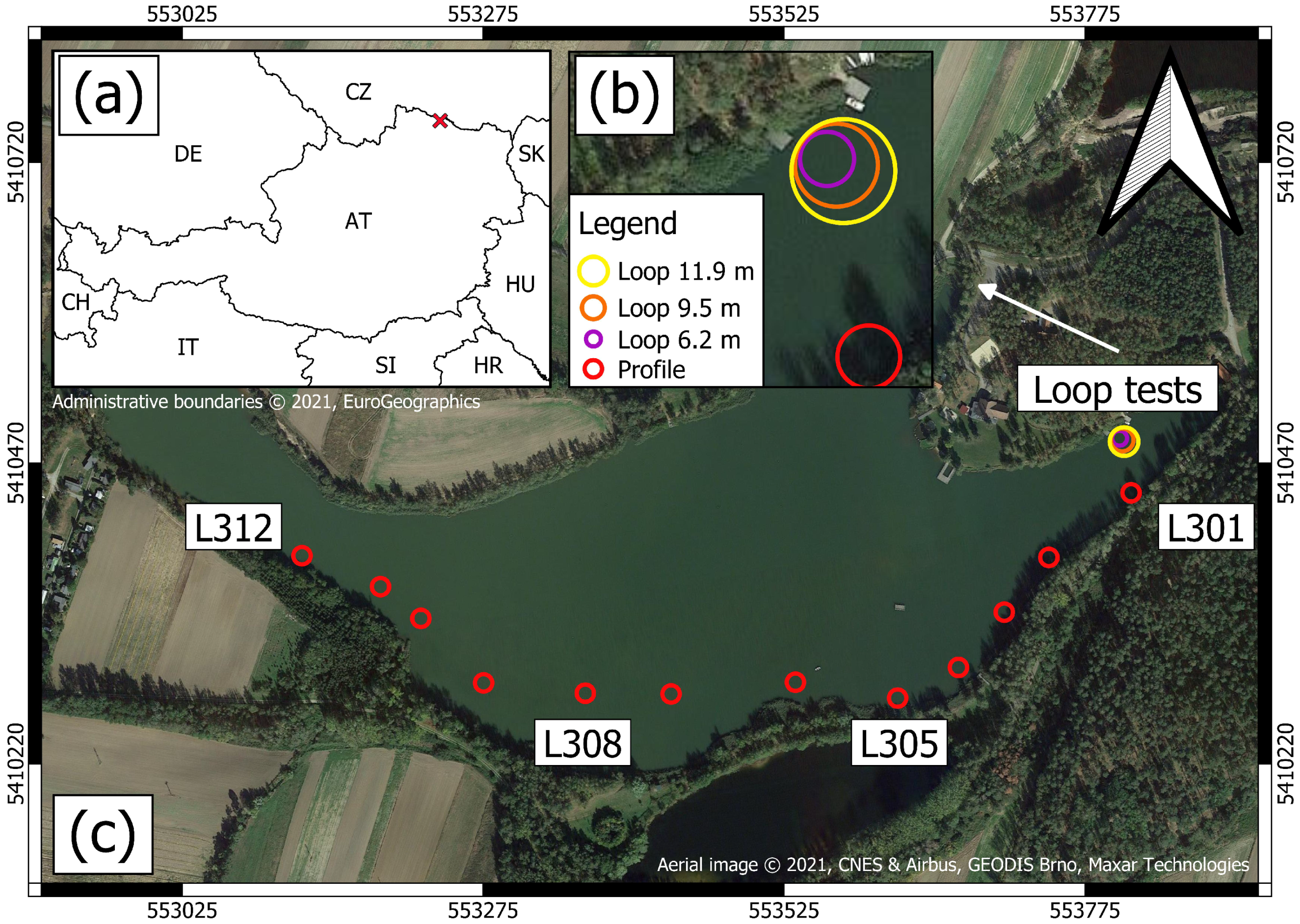
2.1. Test Site
2.2. Water-Conductivity Measurements
2.3. Transient Electromagnetic Measurement Principle
2.4. TEM Measurement System
2.5. Construction of the Floating Loop Antenna
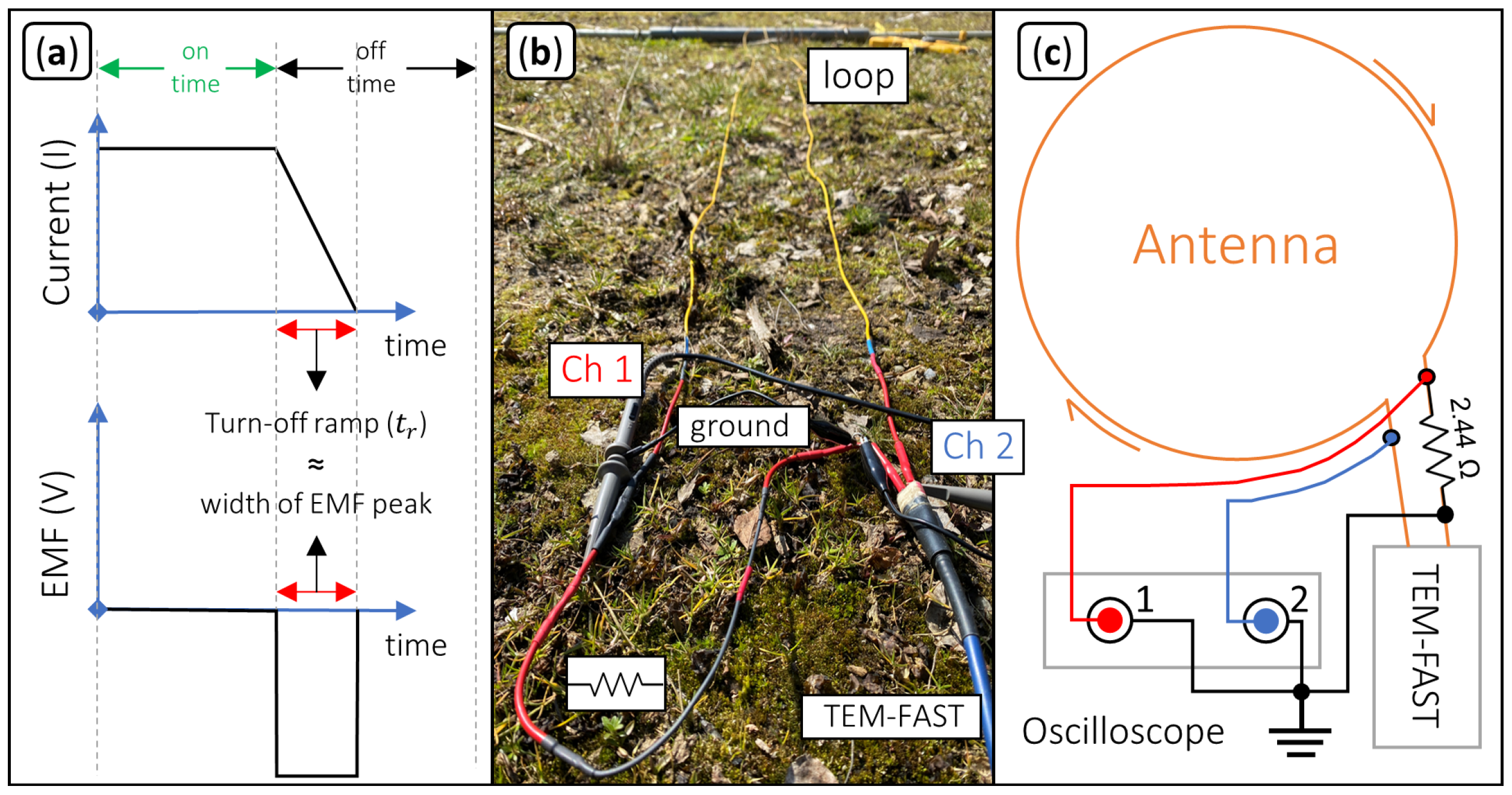
2.6. Determination of the Turn-Off Ramp and the Electromotive Force
2.7. Data Processing and Inversion
2.8. Depth of Investigation and Minimum Effective Sounding Depth
- (a)
- Comparison of inversion results of the same TEM data obtained for different conductivities of the homogeneous starting model (DOI thereafter), similar to the approach proposed by [35] for electrical resistivity tomography (ERT);
- (b)
3. Results
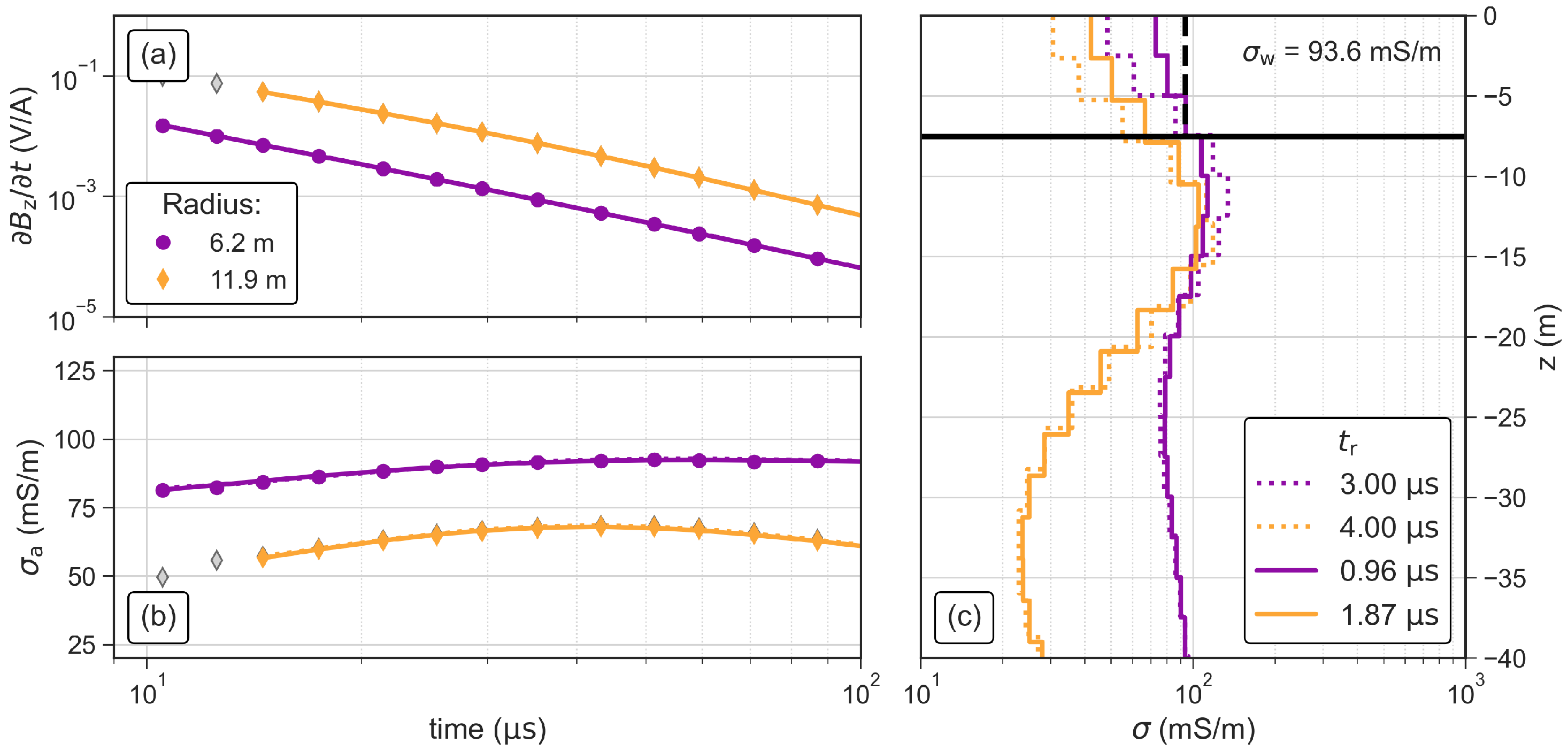
3.1. Quantification of the Turn-Off Ramp to Improve Early-Time Modeling
3.2. Ramp Measurements for Different Geometries and Subsurface Conductivities
3.3. Comparison of TEM Results Using Different Antenna Sizes
3.4. Depth of Investigation and Minimum Effective Sounding Depth
3.5. Comparison of the Central and Single-Loop Configuration
3.6. 2D Conductivity Section at Lake Langau
- 1
- The first layer corresponds to the water; it has a thickness of ∼5 to 10 and a conductivity of /;
- 2
- The second layer has a thickness of 1 to 5 and a conductivity of /;
- 3
- The third layer has a thickness of and the highest conductivity of /;
- 4
- The bottom layer has the lowest observed conductivity / and extends all the way down to the depth of investigation.
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Robinson, D.; Binley, A.; Crook, N.; Day-Lewis, F.; Ferré, T.; Grauch, V.; Knight, R.; Knoll, M.; Lakshmi, V.; Miller, R.; et al. Advancing process-based watershed hydrological research using near-surface geophysics: A vision for, and review of, electrical and magnetic geophysical methods. Hydrol. Processes 2008, 22, 3604–3635. [Google Scholar] [CrossRef]
- Binley, A.; Hubbard, S.S.; Huisman, J.A.; Revil, A.; Robinson, D.A.; Singha, K.; Slater, L.D. The emergence of hydrogeophysics for improved understanding of subsurface processes over multiple scales. Water Resour. Res. 2015, 51, 3837–3866. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Archie, G.E. The electrical resistivity log as an aid in determining some reservoir characteristics. Trans. AIME 1942, 146, 54–62. [Google Scholar] [CrossRef]
- Revil, A.; Glover, P. Nature of surface electrical conductivity in natural sands, sandstones, and clays. Geophys. Res. Lett. 1998, 25, 691–694. [Google Scholar] [CrossRef]
- Glover, P. 11.04–Geophysical Properties of the Near Surface Earth: Electrical Properties. Treatise Geophys. 2015, 89–137. [Google Scholar]
- Auken, E.; Jørgensen, F.; Sørensen, K.I. Large-scale TEM investigation for groundwater. Explor. Geophys. 2003, 34, 188–194. [Google Scholar] [CrossRef]
- Danielsen, J.E.; Auken, E.; Jørgensen, F.; Søndergaard, V.; Sørensen, K.I. The application of the transient electromagnetic method in hydrogeophysical surveys. J. Appl. Geophys. 2003, 53, 181–198. [Google Scholar] [CrossRef]
- Guérin, R.; Descloitres, M.; Coudrain, A.; Talbi, A.; Gallaire, R. Geophysical surveys for identifying saline groundwater in the semi-arid region of the central Altiplano, Bolivia. Hydrol. Processes 2001, 15, 3287–3301. [Google Scholar] [CrossRef]
- Goldman, M.; Gilad, D.; Ronen, A.; Melloul, A. Mapping of seawater intrusion into the coastal aquifer of Israel by the time domain electromagnetic method. Geoexploration 1991, 28, 153–174. [Google Scholar] [CrossRef]
- Yogeshwar, P.; Tezkan, B.; Haroon, A. Investigation of the Azraq sedimentary basin, Jordan using integrated geoelectrical and electromagnetic techniques. Near Surface Geophys. 2013, 11, 381–390. [Google Scholar] [CrossRef]
- Bücker, M.; Garcia, S.L.; Guerrero, B.O.; Caballero, M.; Pérez, L.; Caballero, L.; de la Paz, C.P.; Sánchez-Galindo, A.; Villegas, F.J.; Flores Orozco, A.; et al. Geoelectrical and electromagnetic methods applied to paleolimnological studies: Two examples from desiccated lakes in the Basin of Mexico. Bol. Soc. Geol. Mex. 2017, 69, 279–298. [Google Scholar] [CrossRef]
- Nabighian, M.N.; Macnae, J.C. Time domain electromagnetic prospecting methods. Electromagn. Methods Appl. Geophys. 1991, 2, 427–509. [Google Scholar]
- Fitterman, D.V.; Stewart, M.T. Transient electromagnetic sounding for groundwater. Geophysics 1986, 51, 995–1005. [Google Scholar] [CrossRef]
- Yang, D.; Oldenburg, D.W. Three-dimensional inversion of airborne time-domain electromagnetic data with applications to a porphyry deposit. Geophysics 2012, 77, B23–B34. [Google Scholar] [CrossRef]
- Vignoli, G.; Sapia, V.; Menghini, A.; Viezzoli, A. Examples of improved inversion of different airborne electromagnetic datasets via sharp regularization. J. Environ. Eng. Geophys. 2017, 22, 51–61. [Google Scholar] [CrossRef]
- Auken, E.; Boesen, T.; Christiansen, A.V. A review of airborne electromagnetic methods with focus on geotechnical and hydrological applications from 2007 to 2017. Adv. Geophys. 2017, 58, 47–93. [Google Scholar]
- Constable, S. Ten years of marine CSEM for hydrocarbon exploration. Geophysics 2010, 75, 75A67–75A81. [Google Scholar] [CrossRef] [Green Version]
- Goldman, M.; Gvirtzman, H.; Hurwitz, S. Mapping saline groundwater beneath the Sea of Galilee and its vicinity using time domain electromagnetic (TDEM) geophysical technique. Isr. J. Earth Sci. 2004, 53, 187–197. [Google Scholar] [CrossRef]
- Barrett, B.; Heinson, G.; Hatch, M.; Telfer, A. River sediment salt-load detection using a water-borne transient electromagnetic system. J. Appl. Geophys. 2005, 58, 29–44. [Google Scholar] [CrossRef]
- Mollidor, L.; Tezkan, B.; Bergers, R.; Löhken, J. Float-transient electromagnetic method: In-loop transient electromagnetic measurements on Lake Holzmaar, Germany. Geophys. Prospect. 2013, 61, 1056–1064. [Google Scholar] [CrossRef]
- Yogeshwar, P.; Küpper, M.; Tezkan, B.; Rath, V.; Kiyan, D.; Byrdina, S.; Cruz, J.; Andrade, C.; Viveiros, F. Innovative boat-towed transient electromagnetics—investigation of the Furnas volcanic lake hydrothermal system, Azores. Geophysics 2020, 85, E41–E56. [Google Scholar] [CrossRef]
- Lane Jr, J.W.; Briggs, M.A.; Maurya, P.K.; White, E.A.; Pedersen, J.B.; Auken, E.; Terry, N.; Minsley, B.; Kress, W.; LeBlanc, D.R.; et al. Characterizing the diverse hydrogeology underlying rivers and estuaries using new floating transient electromagnetic methodology. Sci. Total Environ. 2020, 740, 140074. [Google Scholar] [CrossRef]
- Auken, E.; Foged, N.; Larsen, J.J.; Lassen, K.V.T.; Maurya, P.K.; Dath, S.M.; Eiskjær, T.T. tTEM—A towed transient electromagnetic system for detailed 3D imaging of the top 70 m of the subsurface. Geophysics 2018, 84, E13–E22. [Google Scholar] [CrossRef]
- Haroon, A.; Hölz, S.; Gehrmann, R.A.; Attias, E.; Jegen, M.; Minshull, T.A.; Murton, B.J. Marine dipole–dipole controlled source electromagnetic and coincident-loop transient electromagnetic experiments to detect seafloor massive sulphides: Effects of three-dimensional bathymetry. Geophys. J. Int. 2018, 215, 2156–2171. [Google Scholar] [CrossRef]
- Bücker, M.; Flores Orozco, A.; Gallistl, J.; Steiner, M.; Aigner, L.; Hoppenbrock, J.; Glebe, R.; Morales Barrera, W.; Pita de la Paz, C.; García García, C.E.; et al. Integrated land and water-borne geophysical surveys shed light on the sudden drying of large karst lakes in southern Mexico. Solid Earth 2021, 12, 439–461. [Google Scholar] [CrossRef]
- Moser, M.; Weisse, T. The most acidified Austrian lake in comparison to a neutralized mining lake. Limnologica 2011, 41, 303–315. [Google Scholar] [CrossRef] [Green Version]
- In-Situ Inc. In-Situ Website. Available online: https://in-situ.com/en/ (accessed on 23 September 2021).
- Nabighian, M.N. Quasi-static transient response of a conducting half-space—An approximate representation. Geophysics 1979, 44, 1700–1705. [Google Scholar] [CrossRef]
- Telford, W.M.; Telford, W.; Geldart, L.; Sheriff, R.E.; Sheriff, R. Applied Geophysics; Cambridge University Press: Cambridge, UK, 1990; Volume 1. [Google Scholar]
- Ward, S.H.; Hohmann, G.W. Electromagnetic theory for geophysical applications. In Electromagnetic Methods in Applied Geophysics: Voume 1, Theory; Society of Exploration Geophysicists: Tulsa, OK, USA, 1988; pp. 130–311. [Google Scholar]
- Christiansen, A.V.; Auken, E.; Sørensen, K. The transient electromagnetic method. In Groundwater Geophysics; Springer: Berlin/Heidelberg, Germany, 2006; pp. 179–225. [Google Scholar]
- Raiche, A. The effect of ramp function turn-off on the TEM response of layered earth. Explor. Geophys. 1984, 15, 37–41. [Google Scholar] [CrossRef]
- Fitterman, D.V.; Anderson, W.L. Effect of transmitter turn-off time on transient soundings. Geoexploration 1987, 24, 131–146. [Google Scholar] [CrossRef]
- Kaminsky, A. ZondTEM1D (Zond Software Corporation). 2001. Available online: http://zond-geo.com/english/zond-software/electromagnetic-sounding/zondtem1d/ (accessed on 30 September 2021).
- Oldenburg, D.W.; Li, Y. Estimating depth of investigation in DC resistivity and IP surveys. Geophysics 1999, 64, 403–416. [Google Scholar] [CrossRef]
- Spies, B.R. Depth of investigation in electromagnetic sounding methods. Geophysics 1989, 54, 872–888. [Google Scholar] [CrossRef]
- Christiansen, A.V.; Auken, E. A global measure for depth of investigation. Geophysics 2012, 77, WB171–WB177. [Google Scholar] [CrossRef]
- Vignoli, G.; Guillemoteau, J.; Barreto, J.; Rossi, M. Reconstruction, with tunable sparsity levels, of shear wave velocity profiles from surface wave data. Geophys. J. Int. 2021, 225, 1935–1951. [Google Scholar] [CrossRef]
- Kamenetsky, F.; Oelsner, C. Distortions of EM transients in coincident loops at short time-delays. Geophys. Prospect. 2000, 48, 983–993. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| r (m) | A (m2) | O (m) | (m) | l (m) | R () | (mm2) | |
|---|---|---|---|---|---|---|---|
| 13 | 6.2 | 121.0 | 3.0 | 11.0 | 39 | 1.75 | 0.50 |
| 15 | 7.2 | 161.0 | 2.5 | 12.7 | 45 | 2.05 | 0.50 |
| 20 | 9.5 | 286.5 | 6.5 | 17.0 | 60 | 1.82 | 0.75 |
| 25 | 11.9 | 447.6 | 6.0 | 21.1 | 75 | 2.17 | 0.75 |
| ID | r (m) | Campaign | nPts | () | () | Water Depth (m) |
|---|---|---|---|---|---|---|
| L39 | 6.2 | 1 | 14 | 10.53 | 103.2 | 7.5 |
| L60 | 9.5 | 1 | 21 | 12.55 | 413.8 | 7.5 |
| L75 | 11.9 | 1 | 21 | 14.56 | 478.1 | 7.5 |
| L301 | 7.2 | 2 | 15 | 12.55 | 142.3 | 2.8 |
| L302 | 7.2 | 2 | 15 | 12.55 | 142.3 | 7.3 |
| L303 | 7.2 | 2 | 15 | 12.55 | 142.3 | 4.7 |
| L304 | 7.2 | 2 | 15 | 12.55 | 142.3 | 7.5 |
| L305 | 7.2 | 2 | 15 | 12.55 | 142.3 | 7.0 |
| L306 | 7.2 | 2 | 15 | 12.55 | 142.3 | 6.1 |
| L307 | 7.2 | 2 | 15 | 12.55 | 142.3 | 7.4 |
| L308 | 7.2 | 2 | 15 | 12.55 | 142.3 | 3.1 |
| L309 | 7.2 | 2 | 11 | 14.56 | 70.9 | 5.1 |
| L310 | 7.2 | 2 | 15 | 12.55 | 103.2 | 4.3 |
| L311 | 7.2 | 2 | 15 | 12.55 | 142.3 | 4.1 |
| L312 | 7.2 | 2 | 15 | 12.55 | 142.3 | 4.4 |
| Circular (Water) | Circular (Land) | Square (Land) | ||||||
|---|---|---|---|---|---|---|---|---|
| (m) | (m) | 1A | 4A | 1 A | 4 A | (m) | 1 A | 4 A |
| 45 | 6.2 | 0.96 | 1.50 | 0.75 | 0.90 | 9.75 | 0.75 | 0.90 |
| 78 | 9.5 | 0.96 | 1.50 | 1.00 | 1.35 | 15.00 | 1.00 | 1.35 |
| r (m) | A (mm2) | () | (m) | DOI (m) | DOI (m) |
|---|---|---|---|---|---|
| 6.2 | 121.0 | 4.2 ± 0.02 | 6.8 ± 0.2 | 25 ± 5 | 21.3 ± 0.4 |
| 9.6 | 286.5 | 7.0 ± 0.10 | 12.7 ± 0.6 | 35 ± 5 | 46.7 ± 0.8 |
| 11.9 | 447.6 | 8.6 ± 0.10 | 13.8 ± 0.6 | 45 ± 5 | 44.2 ± 0.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aigner, L.; Högenauer, P.; Bücker, M.; Flores Orozco, A. A Flexible Single Loop Setup for Water-Borne Transient Electromagnetic Sounding Applications. Sensors 2021, 21, 6624. https://doi.org/10.3390/s21196624
Aigner L, Högenauer P, Bücker M, Flores Orozco A. A Flexible Single Loop Setup for Water-Borne Transient Electromagnetic Sounding Applications. Sensors. 2021; 21(19):6624. https://doi.org/10.3390/s21196624
Chicago/Turabian StyleAigner, Lukas, Philipp Högenauer, Matthias Bücker, and Adrián Flores Orozco. 2021. "A Flexible Single Loop Setup for Water-Borne Transient Electromagnetic Sounding Applications" Sensors 21, no. 19: 6624. https://doi.org/10.3390/s21196624
APA StyleAigner, L., Högenauer, P., Bücker, M., & Flores Orozco, A. (2021). A Flexible Single Loop Setup for Water-Borne Transient Electromagnetic Sounding Applications. Sensors, 21(19), 6624. https://doi.org/10.3390/s21196624