Experimental Study on Dispersion Effects of F (1,1) Wave Mode on Thin Waveguide When Embedded with Fluid



Abstract
:1. Introduction
2. Background
2.1. Guided Wave in Cylindrical Waveguides
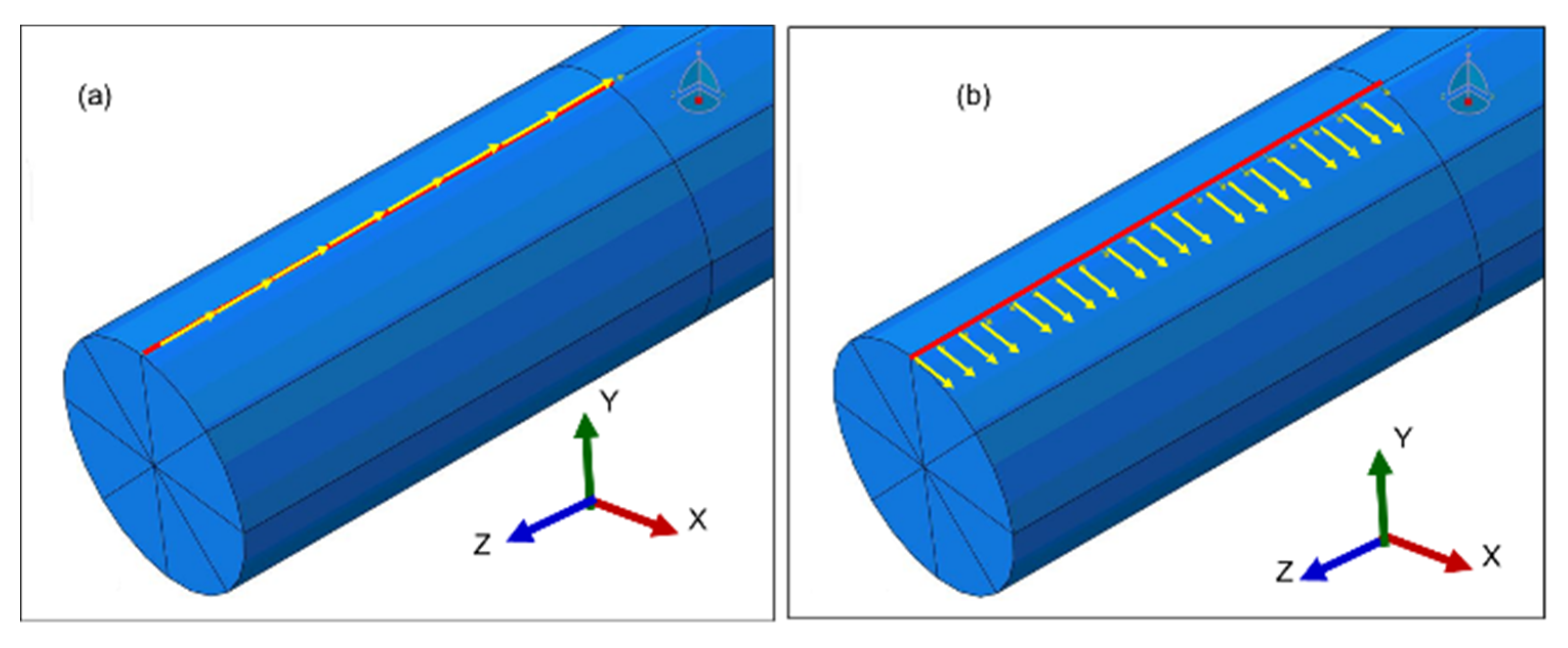
2.2. FEM Simulation Studies
- (a)
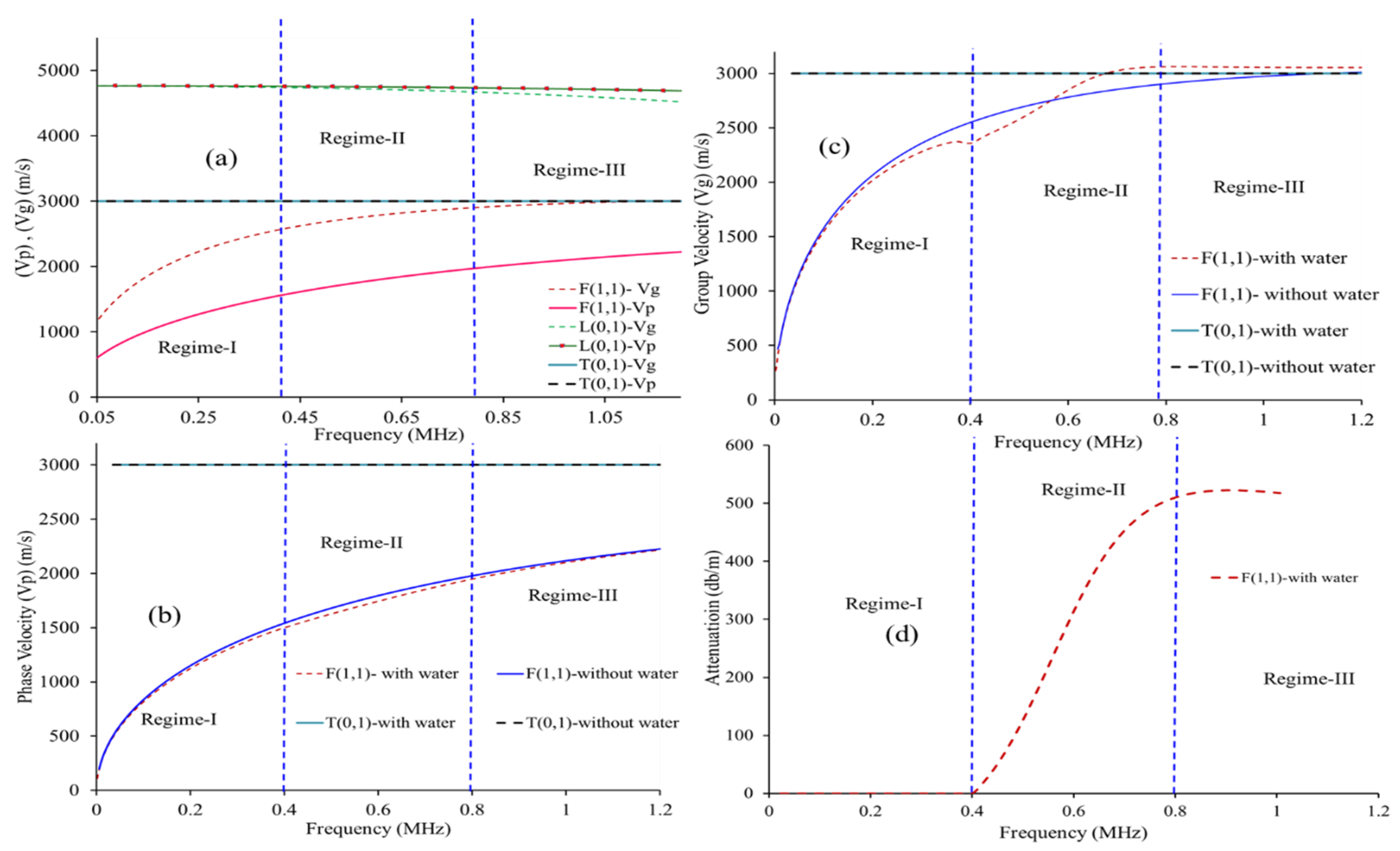
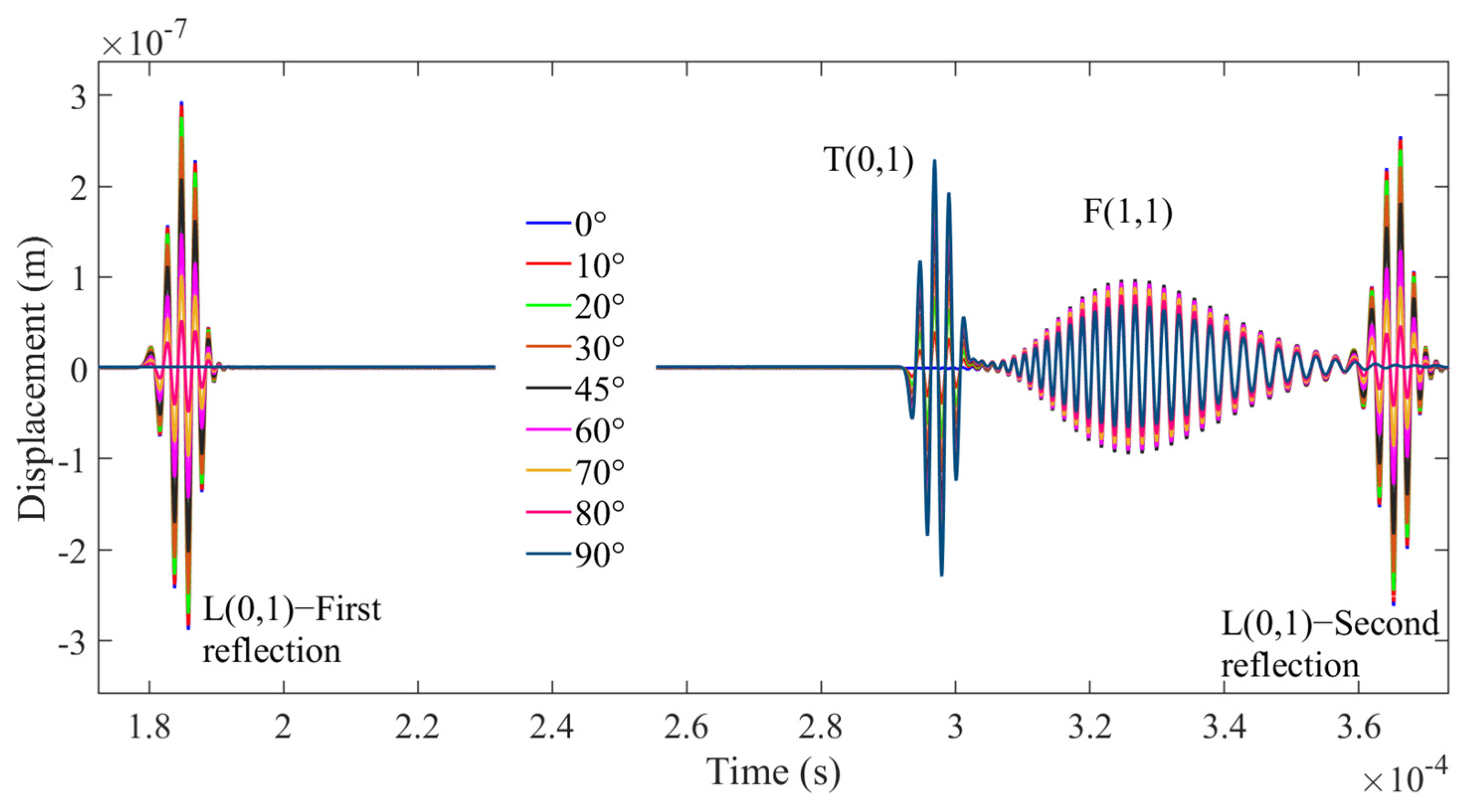
- The F(1,1) mode is relatively more sensitive to the surrounding inviscid fluid media compared to L(0,1) and T(0,1) across the three regimes.
- (b)
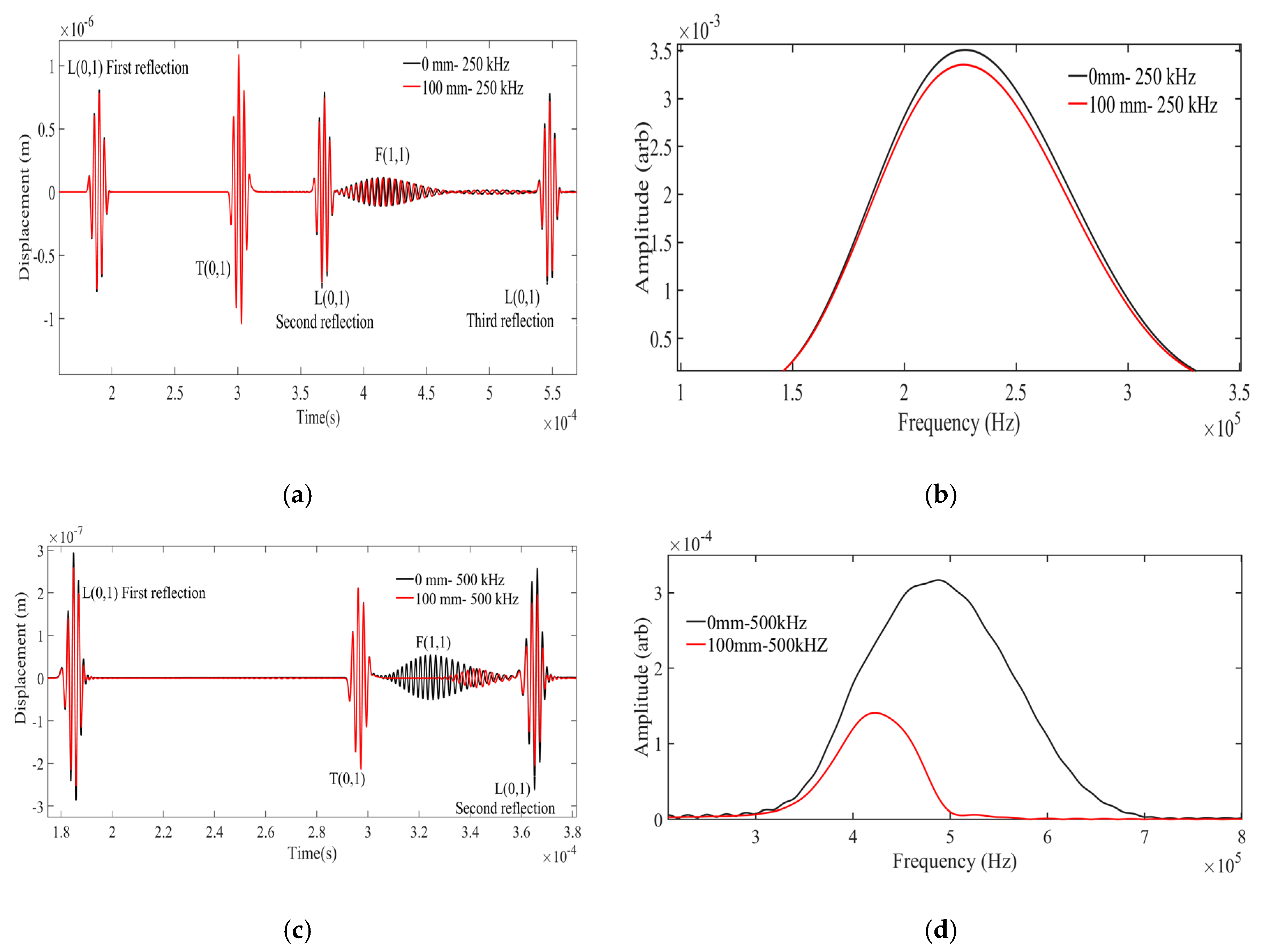
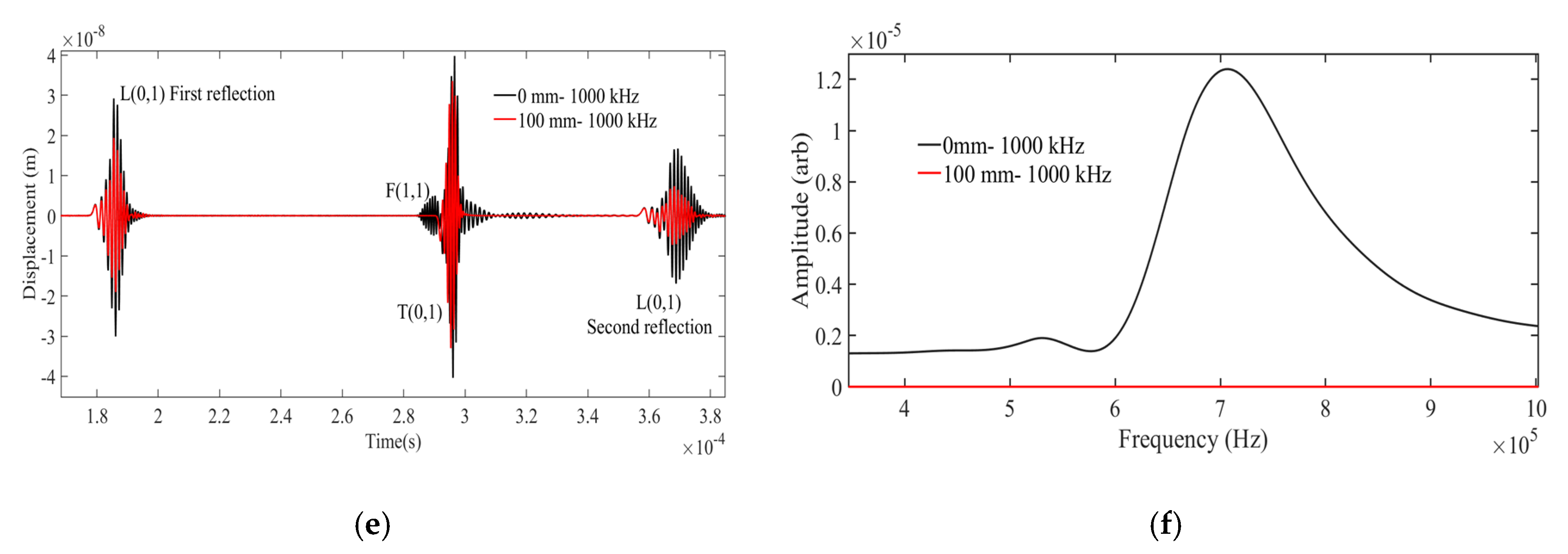
- The L(0,1) wave mode remains non-dispersive at 250 kHz and 500 kHz and becomes dispersive when operated at 1000 kHz.
- (c)
- T(0,1) remains non-dispersive across these regimes.
- (d)
- (e)
- (f)
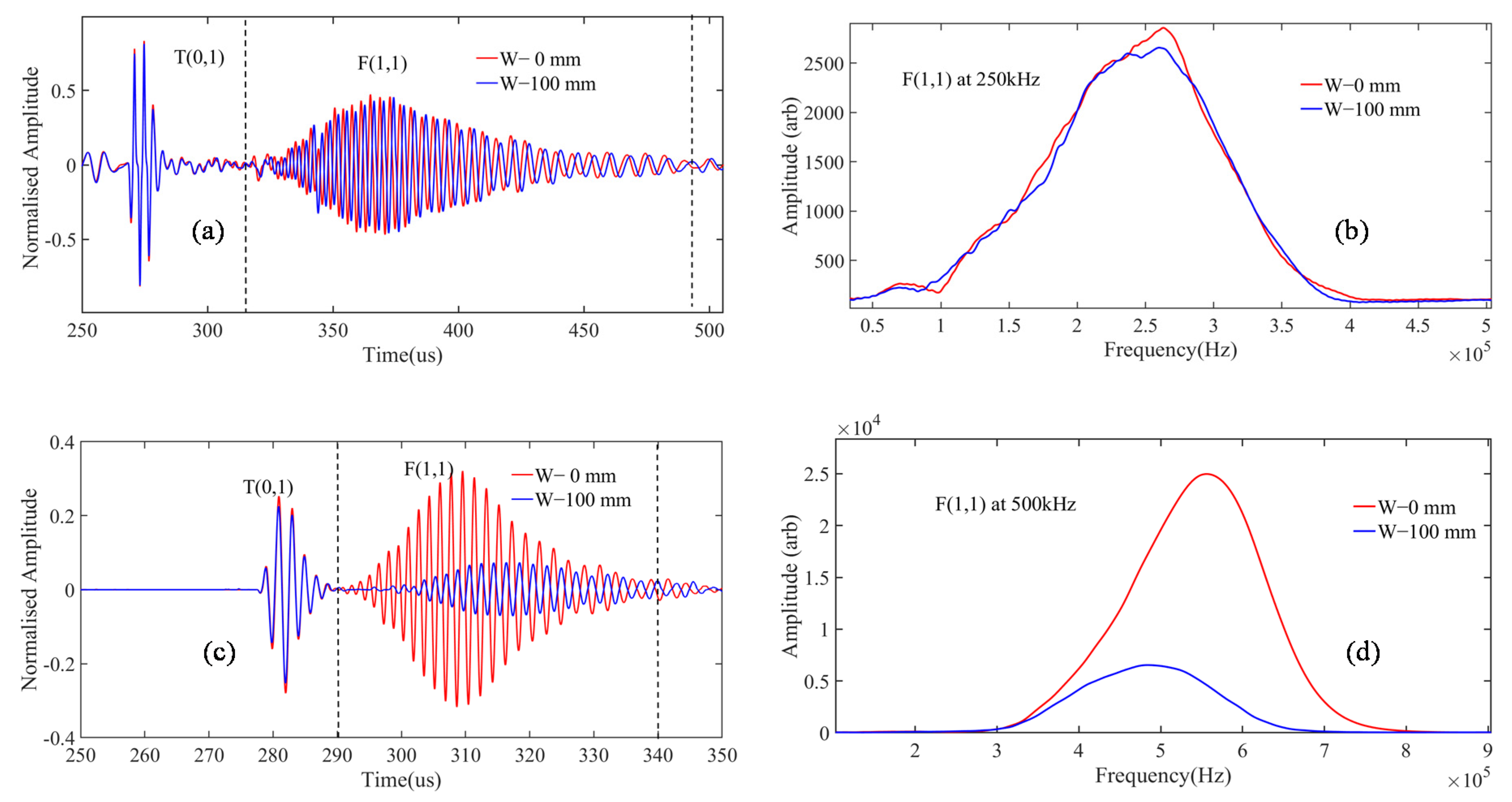
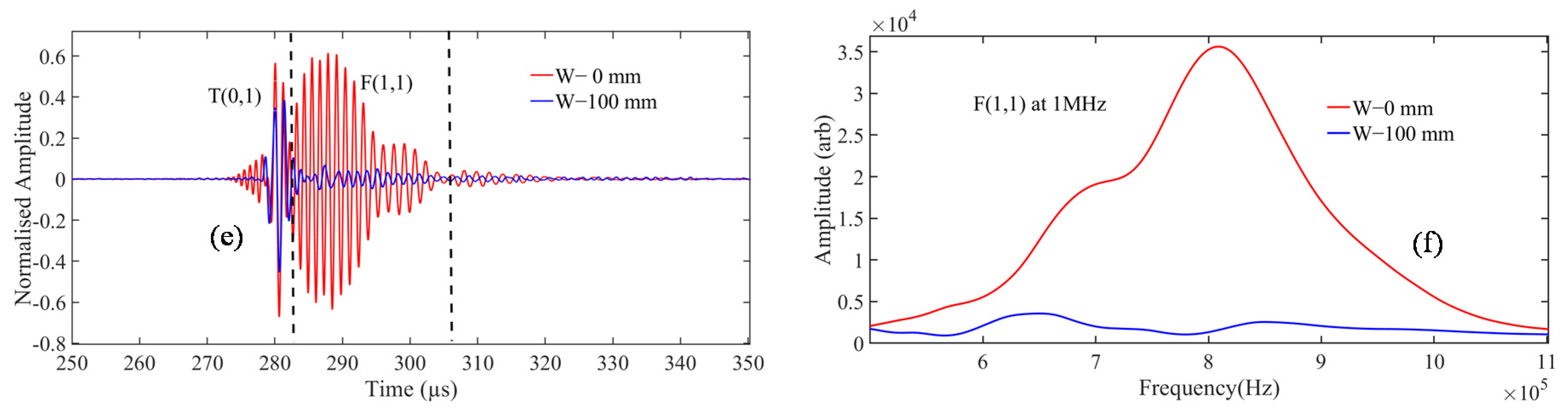
- It was noticed in Regime-III that the attenuation (amplitude drop) of the F(1,1) mode is predominant when compared to the TOF and frequency shift (refer to Figure 6c). The velocity of F(1,1) also matches with the T(0,1) velocity; hence, the extraction of FFT of (F1,1) is carried out in the region marked in Figure 6e.
- (g)
- Additionally in the Regime-III, the peak frequency of F(1,1) is around 700 kHz (refer to Figure 6f).
- (h)
- All three wave modes follow the dispersion curve results across these regimes.
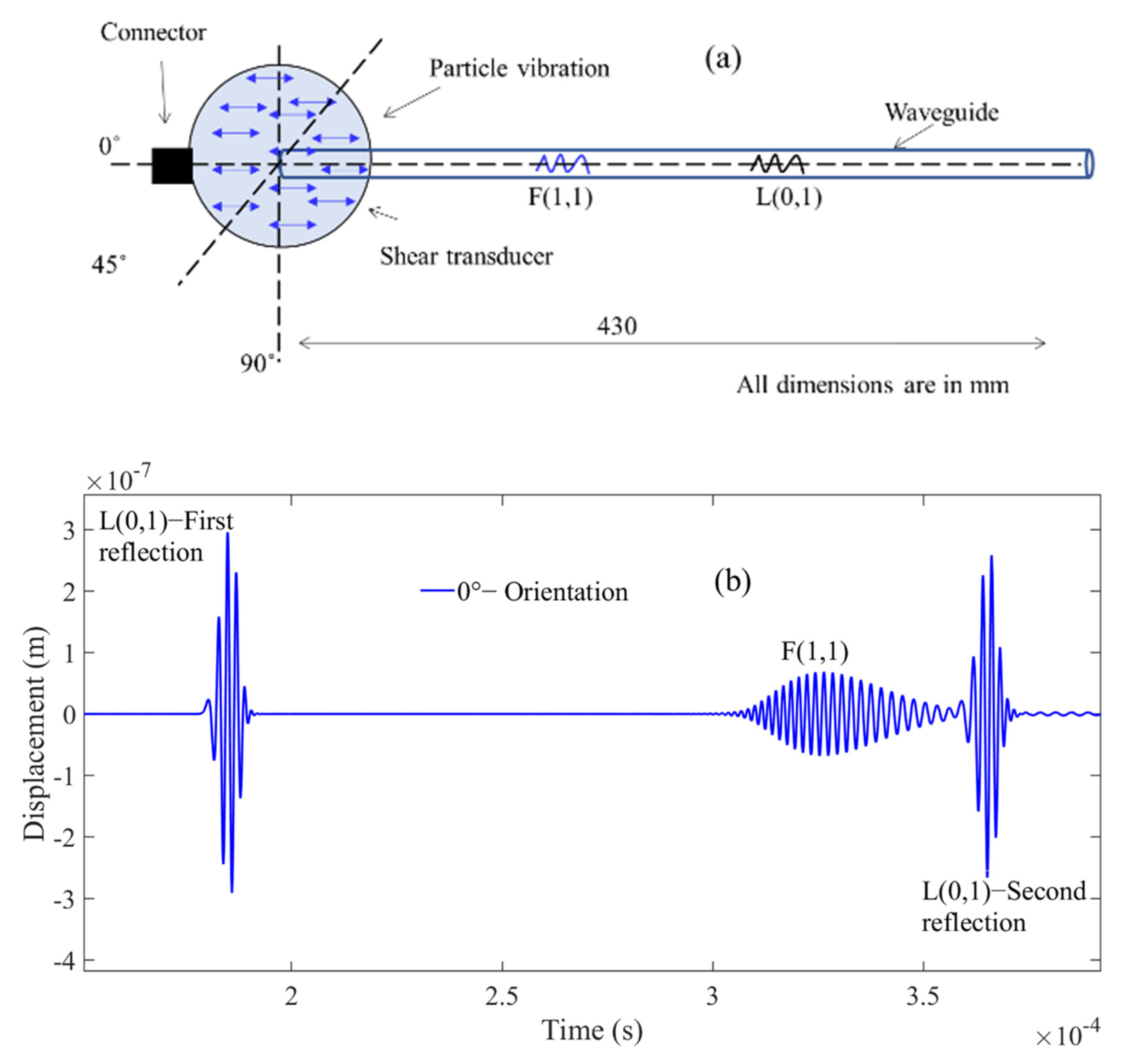
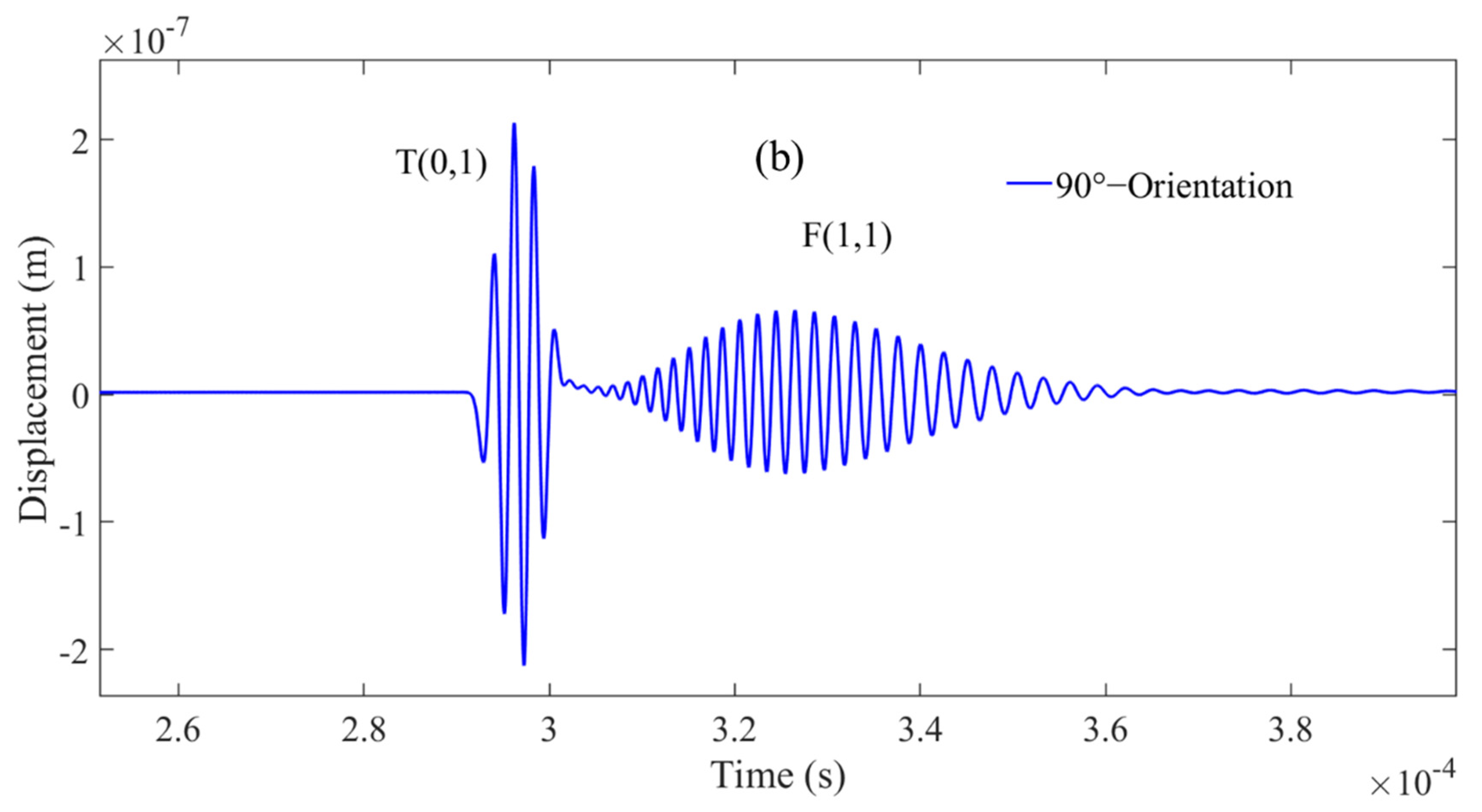
3. Experimental Setup and Validation
4. Results and Discussion
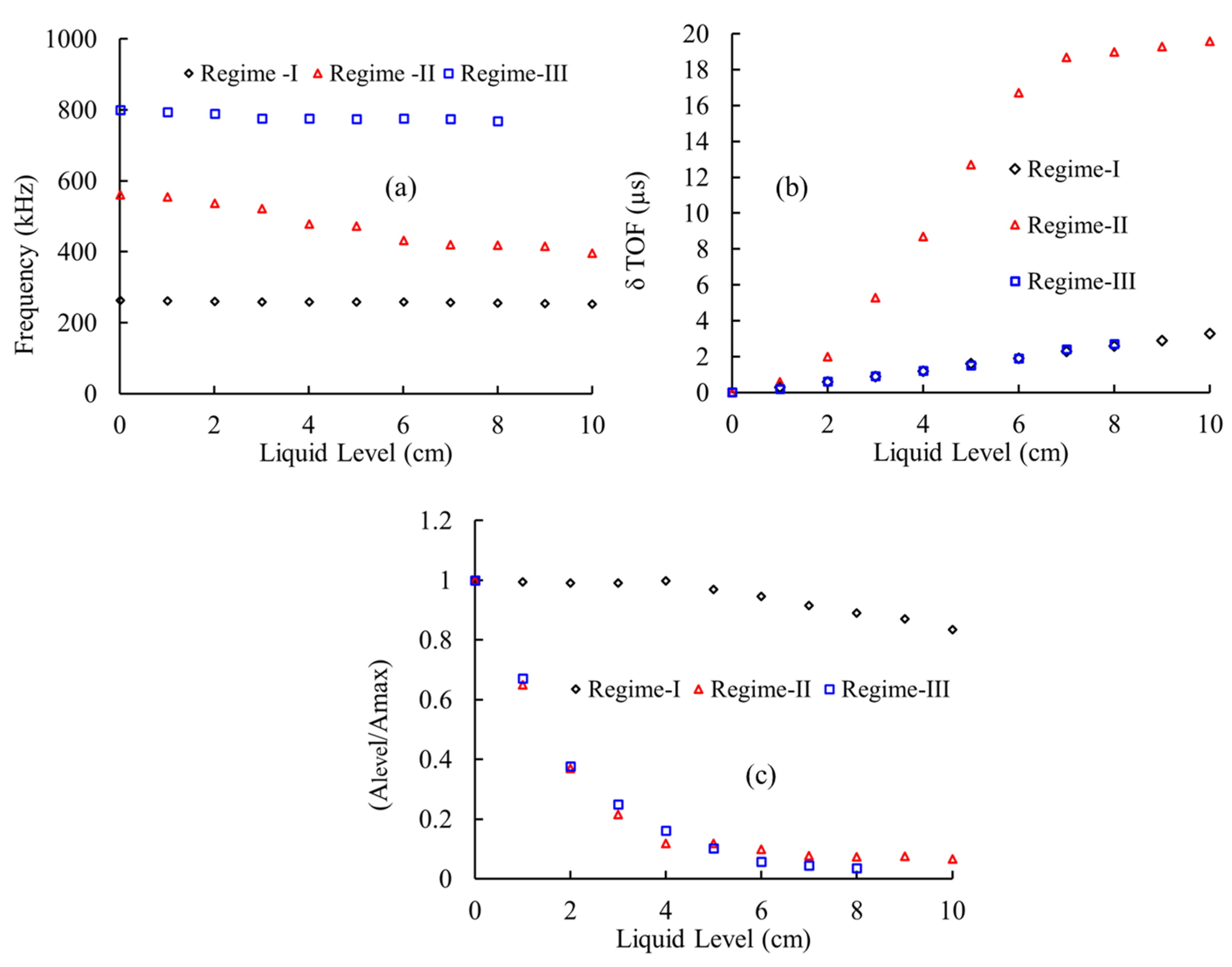
- At 250 kHz (Regime-I), negligible change in peak frequency and signal leakage to the surrounding medium is minimal, but significant change in TOF was noted.
- Whereas in 500 kHz (Regime-II), significant change in TOF and peak frequency shift and signal leakage to the surrounding medium was noted. This is mainly due to the attenuation dispersion effects of F(1,1) at this operating frequency regime.
- Finally, at Regime-III (1000 kHz), the attenuation and the wave leakage of F(1,1) to the fluid medium is higher when related to Regime-I and -II and merges with the T(0,1), since both the F(1,1) and T(0,1) velocity matches at this operating frequency.
- It was also noticed at Regime-III (1000 kHz) that the frequency of the F(1,1) mode was around 800 kHz.
5. Repeatability Experiments
6. Conclusions and Future Work
- The use of highly sensitive F(1,1) mode-based level sensing approach that has not been reported elsewhere.
- The exploitation of F(1,1) at three distinct frequency ranges (i.e., >250 kHz, >500 kHz and >1000 kHz) was studied and validated by FEM and experimental results.
- The use of Regime-I for higher range of measurements and Regime-II for lower range of measurements with high sensitivity is discussed.
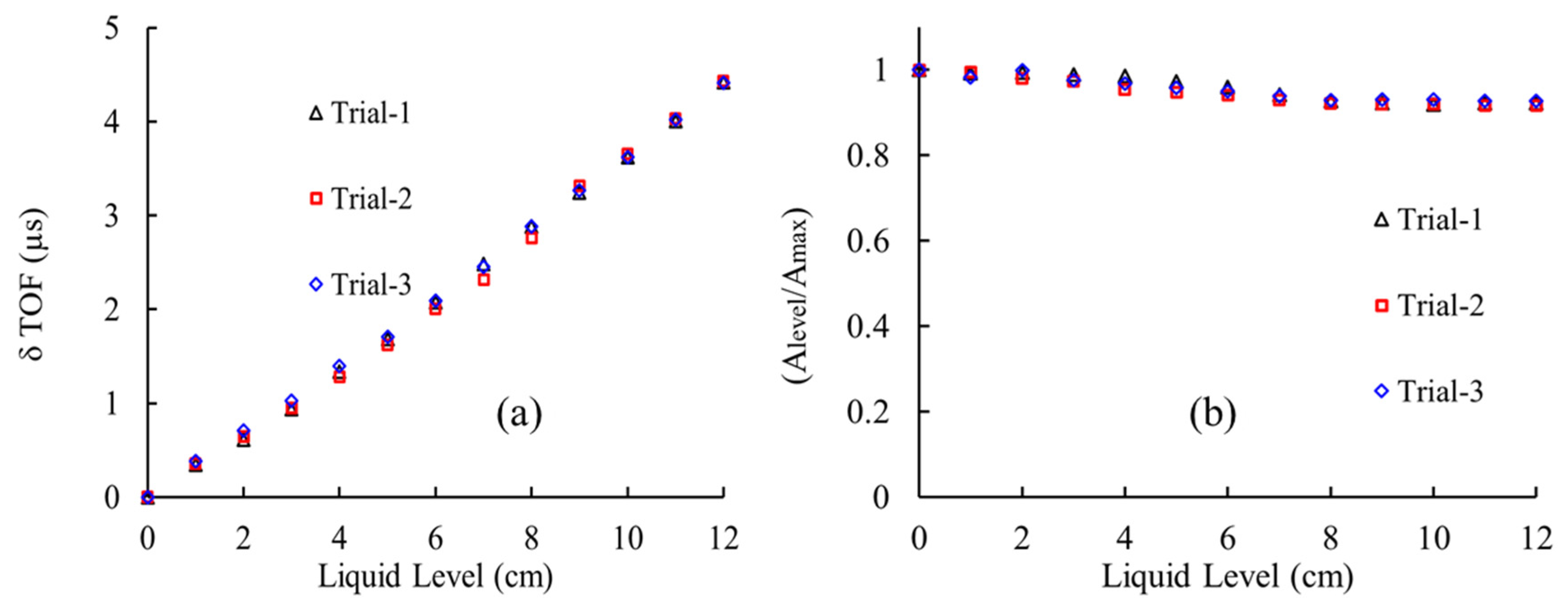
- For measurement of level with high sensitivity but low range, the Regime-II is preferred. For example in the case demonstrated an excellent sensitivity in TOF shift—(0.196 µs/mm) and Frequency shift—(1.6 kHz/mm), can be achieved, however the range of measurement is limited only to 100mm approximately.
- For measurement of level with lower sensitivity but higher range, the Regime-I is preferred. For example in the case demonstrated an acceptable sensitivity in TOF shift—(0.029 µs/mm) and frequency shift—(0.1 kHz/mm). However the range of measurement can be extended to more than 1000 mm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bentley, R.E. Long-term drift in mineral-insulated Nicrosil-sheathed type K thermocouples. Sens. Actuators A Phys. 1990, 24, 21–26. [Google Scholar] [CrossRef]
- Lynnworth, L.C. Ultrasonic Measurements for Process Control: Theory, Techniques, Applications; Academic Press, Inc.: San Diego, CA, USA, 2013. [Google Scholar]
- Lenner, M.; Kassubek, F.; Bernhard, C.; Yang, L.; Pape, D. Single-Element Ultrasonic Transducer for Non-Invasive Measurements. IEEE Sens. J. 2020, 20, 4080–4086. [Google Scholar] [CrossRef]
- Shah, V.V.; Balasubramaniam, K. Effect of viscosity on ultrasound wave reflection from a solid/liquid interface. Ultrasonics 1996, 34, 817–824. [Google Scholar] [CrossRef]
- Kazys, R.; Sliteris, R.; Raisutis, R.; Zukauskas, E.; Vladisauskas, A.; Mazeika, L. Waveguide sensor for measurement of viscosity of highly viscous fluids. Appl. Phys. Lett. 2013, 103, 204102. [Google Scholar] [CrossRef]
- Balasubramaniam, K.; Shah, V.V.; Costley, D.; Bourdeaux, G.; Singh, J.P. High temperature ultrasonic sensor for the simultaneous measurement of viscosity and temperature of melts. Rev. Sci. Instrum. 1999, 70, 4618–4623. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Waves in Solid Media; Cambridge University Press: Cambridge, UK, 1999; pp. 143–152. [Google Scholar]
- Kazys, R.; Sliteris, R.; Rekuviene, R.; Zukauskas, E.; Mazeika, L. Ultrasonic technique for density measurement of liquids in extreme conditions. Sensors 2015, 15, 19393–19415. [Google Scholar] [CrossRef] [Green Version]
- Prasad, V.S.K.; Balasubramaniam, K.; Kannan, E.; Geisinger, K.L. Viscosity measurements of melts at high temperatures using ultrasonic guided waves. J. Mater. Process. Technol. 2008, 207, 315–320. [Google Scholar] [CrossRef]
- Balasubramaniam, K.; Raja, N.; Periyannan, S. Ultrasonic Waveguide Sensors for Measurements in Process Industries. IEEE Sensors 2018, 1–4. [Google Scholar]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Lowe, M.J.S.; Alleyne, D.N.; Cawley, P. Defect detection in pipes using guided waves. Ultrasonics 1998, 36, 147–154. [Google Scholar] [CrossRef]
- Ghavamian, A.; Mustapha, F.; Baharudin, B.T.; Yidris, N. Detection, localisation and assessment of defects in pipes using guided wave techniques: A review. Sensors 2018, 18, 4470. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Periyannan, S.; Balasubramaniam, K. Simultaneous moduli measurement of elastic materials at elevated temperatures using an ultrasonic waveguide method. Rev. Sci. Instrum. 2015, 86, 114903. [Google Scholar] [CrossRef]
- Periyannan, S.; Rajagopal, P.; Balasubramaniam, K. Torsional mode ultrasonic helical waveguide sensor for re-configurable temperature measurement. AIP Adv. 2016, 6, 065116. [Google Scholar] [CrossRef]
- Periyannan, S.; Rajagopal, P.; Balasubramaniam, K. Re-configurable multi-level temperature sensing by ultrasonic “spring-like” helical waveguide. J. Appl. Phys. 2016, 119, 144502. [Google Scholar] [CrossRef]
- Periyannan, S.; Rajagopal, P.; Balasubramaniam, K. Multiple temperature sensors embedded in an ultrasonic “spiral-like” waveguide. AIP Adv. 2017, 7, 035201. [Google Scholar] [CrossRef]
- Raja, N.; Balasubramaniam, K.; Periyannan, S. Ultrasonic waveguide-based multi-level temperature sensor for confined space measurements. IEEE Sens. J. 2018, 18, 5699–5706. [Google Scholar] [CrossRef]
- Nishanth, R.; Lingadurai, K.; Periyannan, S.; Balasubramaniam, K. Ultrasonic waveguide-based distributed temperature measurement on a solid surface. Insight-Non-Destr. Test. Cond. Monit. 2017, 59, 358–363. [Google Scholar] [CrossRef]
- Balasubramaniam, K.; Periyannan, S. Ultrasonic Waveguide Technique for Distribute Sensing and Measurements of Physical and Chemical Properties of Surrounding Media. US Patent 16/726,123, 9 July 2020. [Google Scholar]
- Vogt, T.; Lowe, M.; Cawley, P. Cure monitoring using ultrasonic guided waves in wires. J. Acoust. Soc. Am. 2003, 114, 1303–1313. [Google Scholar] [CrossRef]
- Gokul, R.S.G.; Raja, N.; Balasubramaniam, K.; John, A. Multi-point high temperature measurement using long ultrasonic ceramic waveguides. In Proceedings of the 46th Annual Review of Progress in Quantitative Nondestructive Evaluation QNDE2019, Portland, OR, USA, 14–19 July 2019. [Google Scholar]
- Kim, J.O.; Bau, H.H.; Liu, Y.; Lynnworth, L.C.; Lynnworth, S.A.; Hall, K.A.; Korba, J.A. Torsional sensor applications in two-phase fluids. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1993, 40, 563–576. [Google Scholar] [CrossRef] [Green Version]
- Spratt, W.K.; Vetelino, J.F.; Lynnworth, L.C. Torsional ultrasonic waveguide sensor. In Proceedings of the 2010 IEEE International Ultrasonics Symposium, San Diego, CA, USA, 11–14 October 2010; pp. 702–706. [Google Scholar]
- Shin, H.J.; Rose, J.L. Guided waves by axisymmetric and non-axisymmetric surface loading on hollow cylinders. Ultrasonics 1999, 37, 355–363. [Google Scholar] [CrossRef]
- Knowles, T.J. Acoustic Flexural Order Level Sensor. U.S. Patent 9,285,261, 15 March 2016. [Google Scholar]
- Pandey, J.C.; Raj, M.; Lenka, S.N.; Suresh, P.; Balasubramaniam, K. Measurement of viscosity and melting characteristics of mould powder slags by ultrasonics. Ironmak. Steelmak. 2011, 38, 74–79. [Google Scholar] [CrossRef]
- Raja, N.; Balasubramaniam, K.; Periyannan, S. Ultrasonic waveguide based level measurement using flexural mode F (1, 1) in addition to the fundamental modes. Rev. Sci. Instrum. 2019, 90, 045108. [Google Scholar] [CrossRef] [PubMed]
- Hibbitt, D.; Karlsson, B.; Sorensen, P. Abaqus 6.12 Documentation and User Manual; Dassault Systems Simulia Corp: Johnston, RI, USA, 2012. [Google Scholar]
- Pavlakovic, B.; Lowe, M.; Alleyne, D.; Cawley, P. Disperse: A general purpose program for creating dispersion curves. In Review of Progress in Quantitative Nondestructive Evaluation; Springer: Boston, MA, USA, 1997; pp. 185–192. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Stainless Steel |
|---|---|
| Grade | 308 L |
| Waveguide Diameter (D) | 1.00 mm |
| Mass density (ρ) | 7932.00 kg/m3 |
| Young’s modulus (E) | 183.00 GPA |
| Poisson’s ratio (µ) | 0.30 |
| Number of cycles | 5 |
| Central frequencies (kHz) | 250, 500, 1000 |
| Operating Frequency | Frequency Shift | TOF Shift | Amplitude Drop |
|---|---|---|---|
| Regime-I | F(1,1) | F(1,1) | L(0,1), F(1,1) |
| Regime-II | F(1,1) | F(1,1) | L(0,1), F(1,1) |
| Regime-III | F(1,1) | L(0,1), F(1,1) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raja, N.; Balasubramaniam, K. Experimental Study on Dispersion Effects of F (1,1) Wave Mode on Thin Waveguide When Embedded with Fluid. Sensors 2021, 21, 322. https://doi.org/10.3390/s21020322
Raja N, Balasubramaniam K. Experimental Study on Dispersion Effects of F (1,1) Wave Mode on Thin Waveguide When Embedded with Fluid. Sensors. 2021; 21(2):322. https://doi.org/10.3390/s21020322
Chicago/Turabian StyleRaja, Nishanth, and Krishnan Balasubramaniam. 2021. "Experimental Study on Dispersion Effects of F (1,1) Wave Mode on Thin Waveguide When Embedded with Fluid" Sensors 21, no. 2: 322. https://doi.org/10.3390/s21020322
APA StyleRaja, N., & Balasubramaniam, K. (2021). Experimental Study on Dispersion Effects of F (1,1) Wave Mode on Thin Waveguide When Embedded with Fluid. Sensors, 21(2), 322. https://doi.org/10.3390/s21020322