Evaluation of Adaptive Loop-Bandwidth Tracking Techniques in GNSS Receivers †

 , ,
, ,  , and
, and
Abstract
:1. Introduction
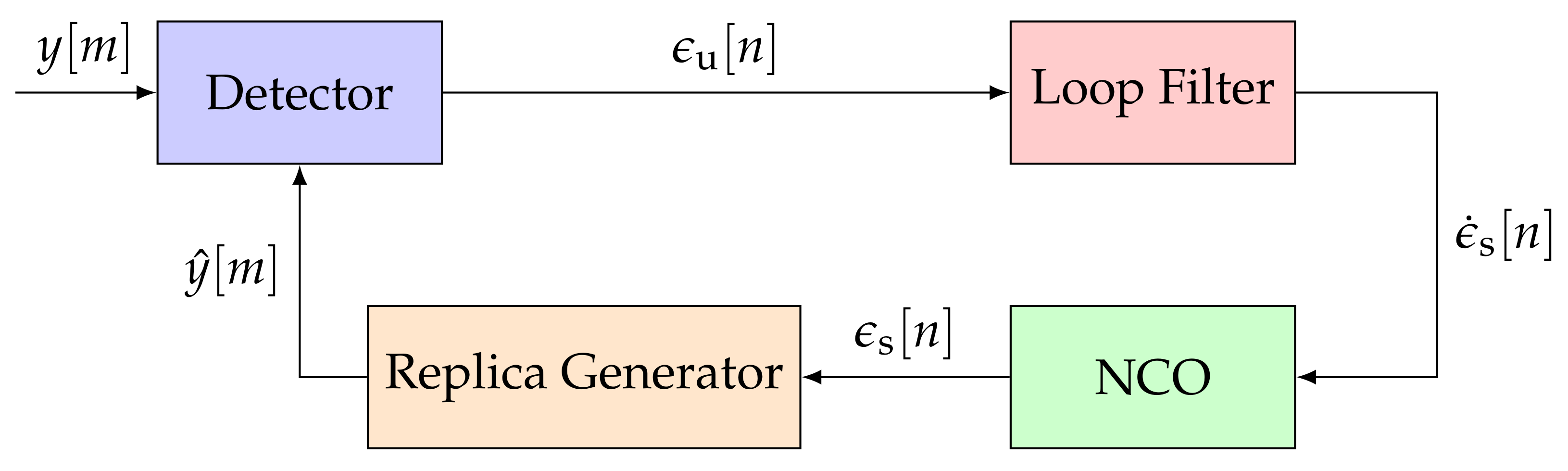
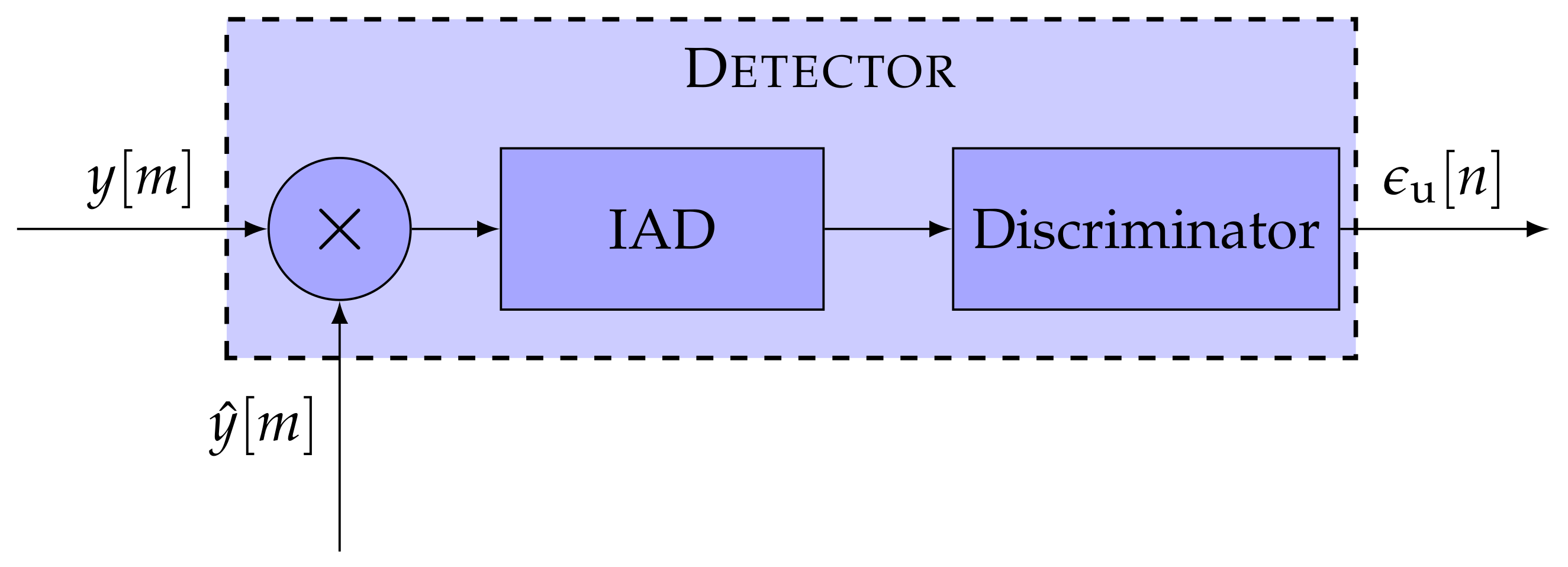
2. Scalar Tracking Loops
2.1. Non-Linear Model
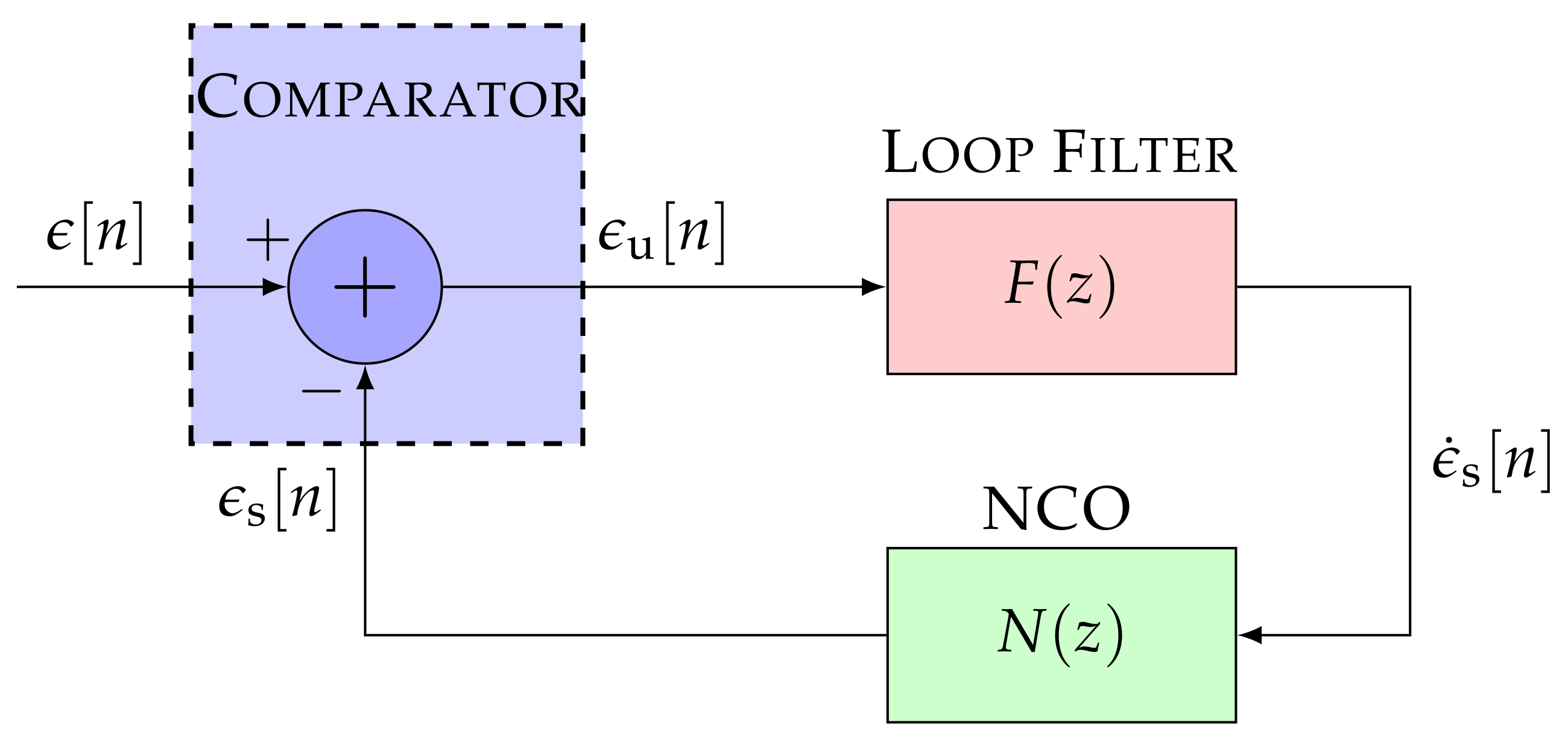
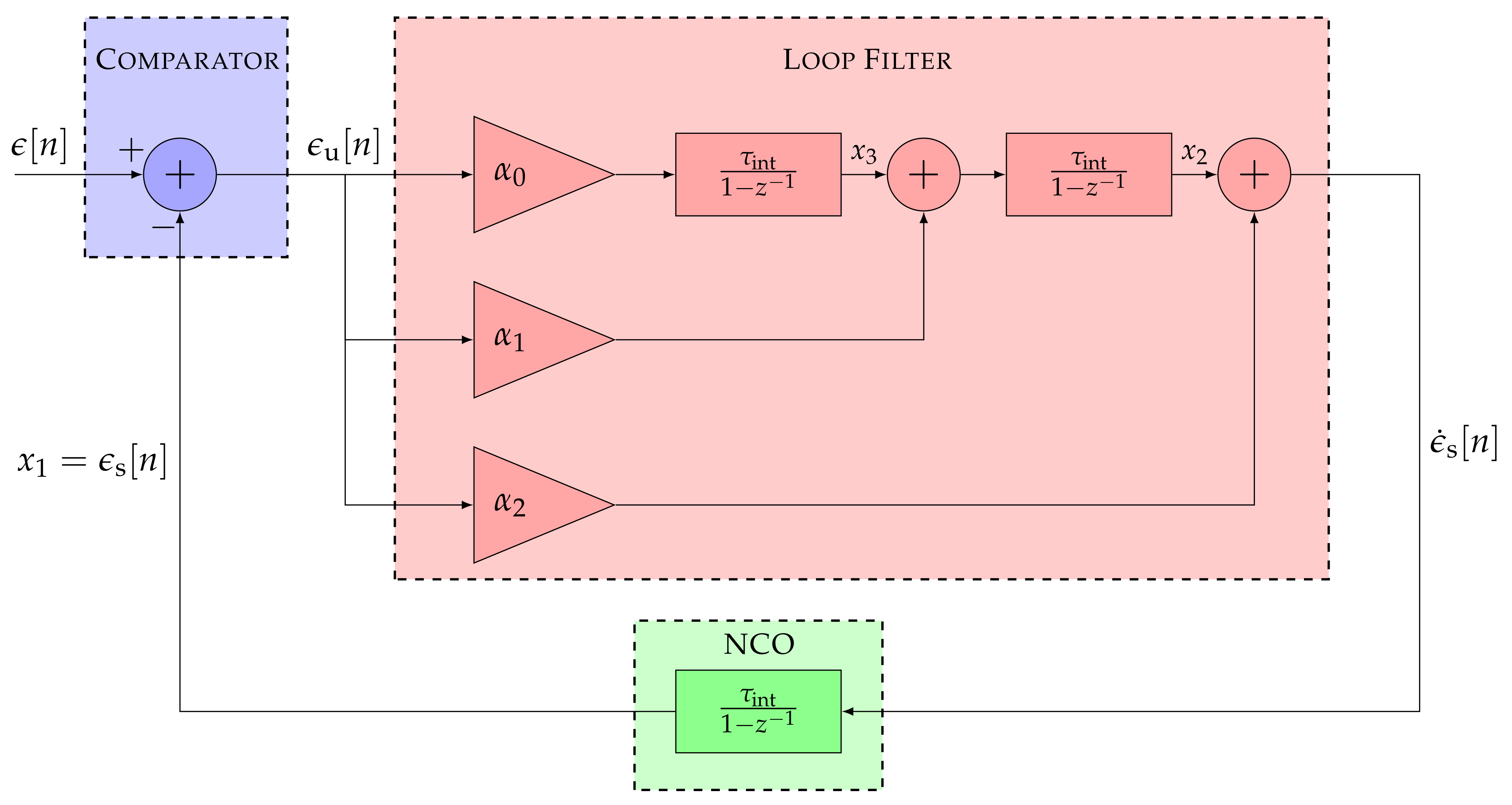
2.2. Linear Model
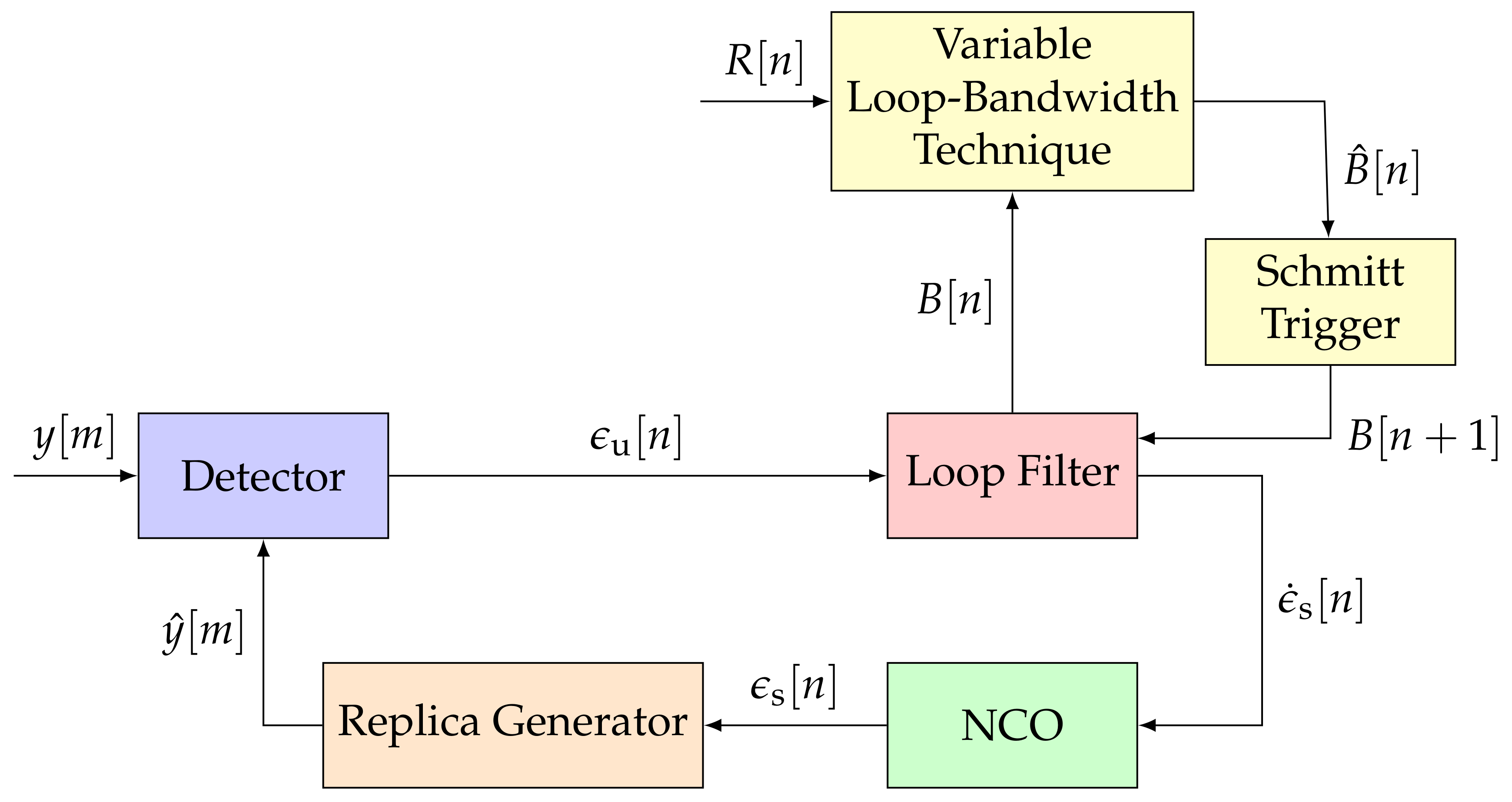
3. Variable Loop-Bandwidth Tracking Techniques
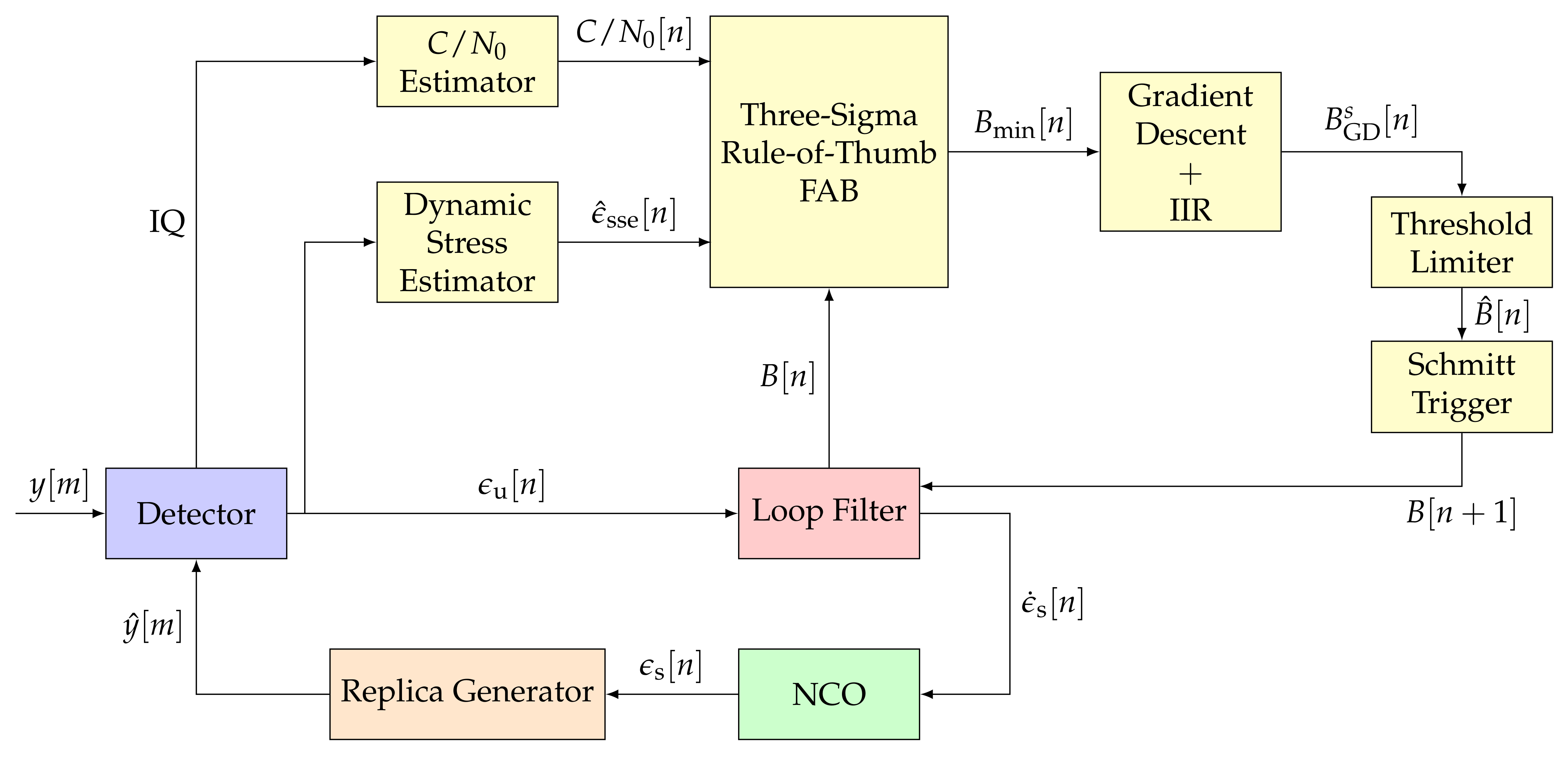
3.1. Fast Adaptive Bandwidth (FAB)
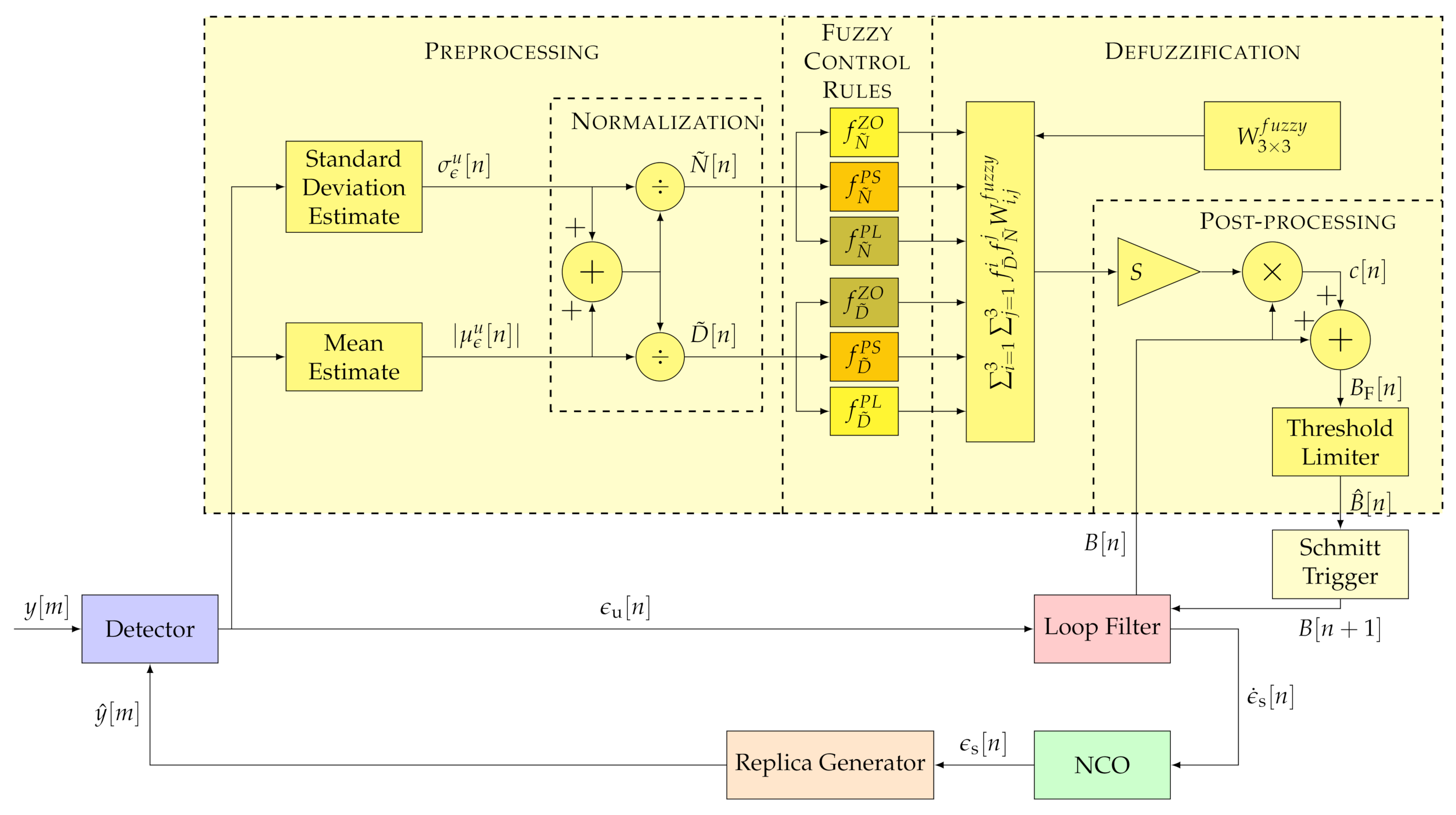
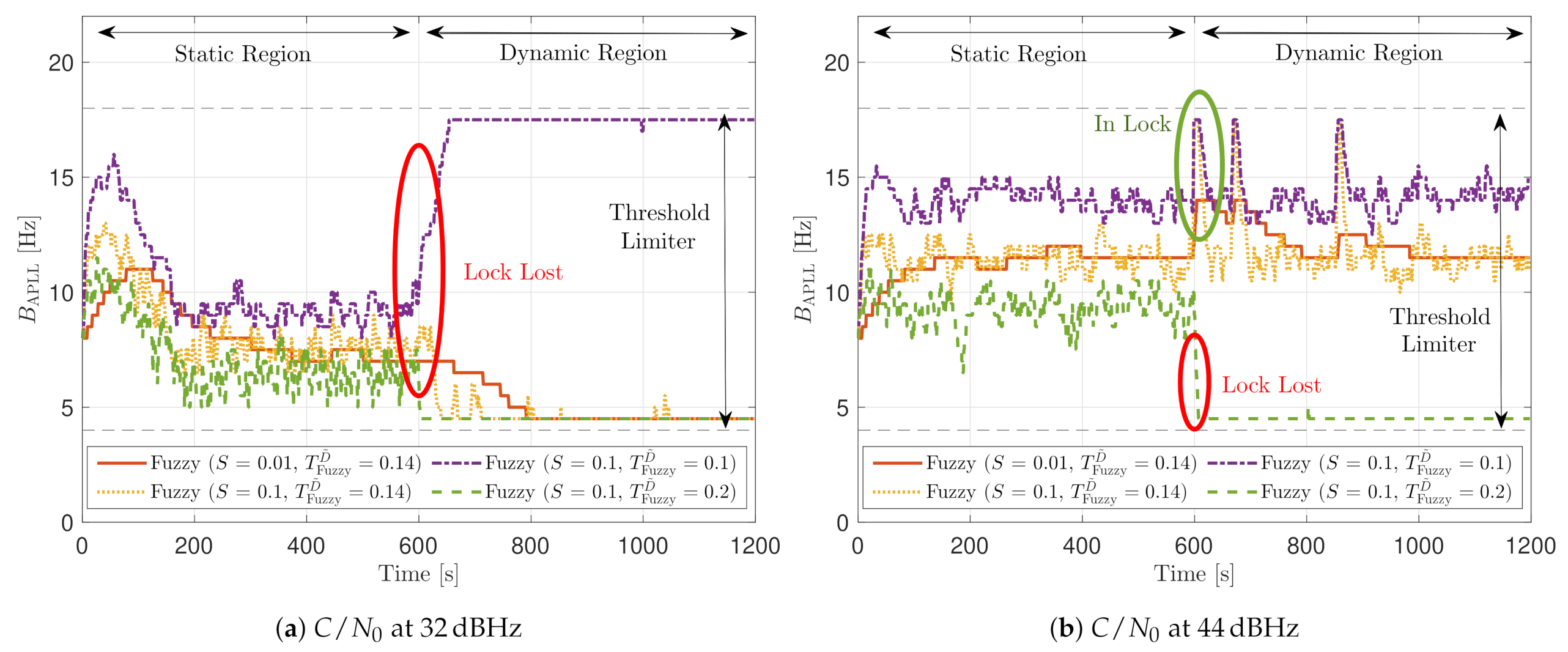
3.2. Fuzzy Logic (FL)
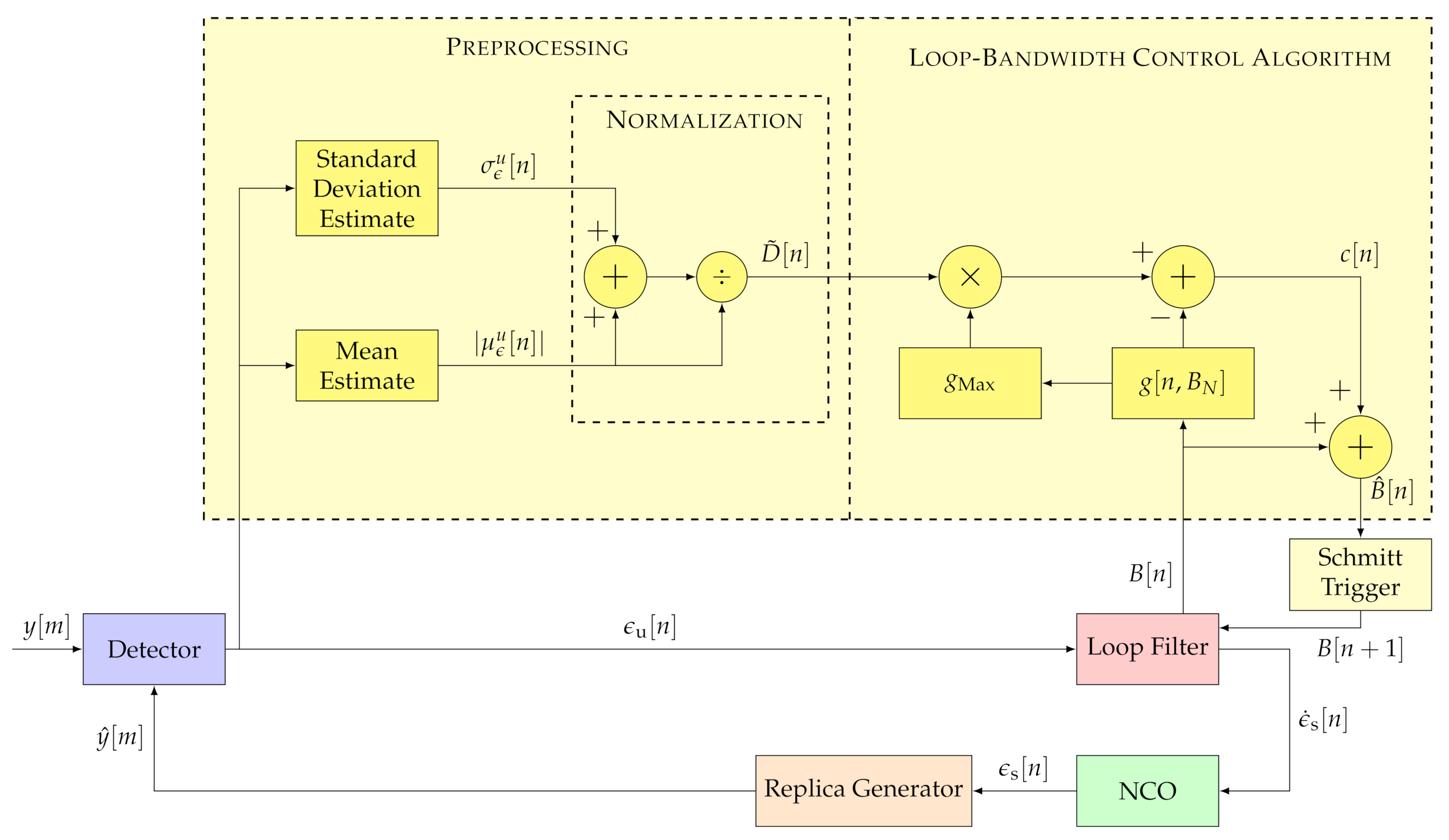
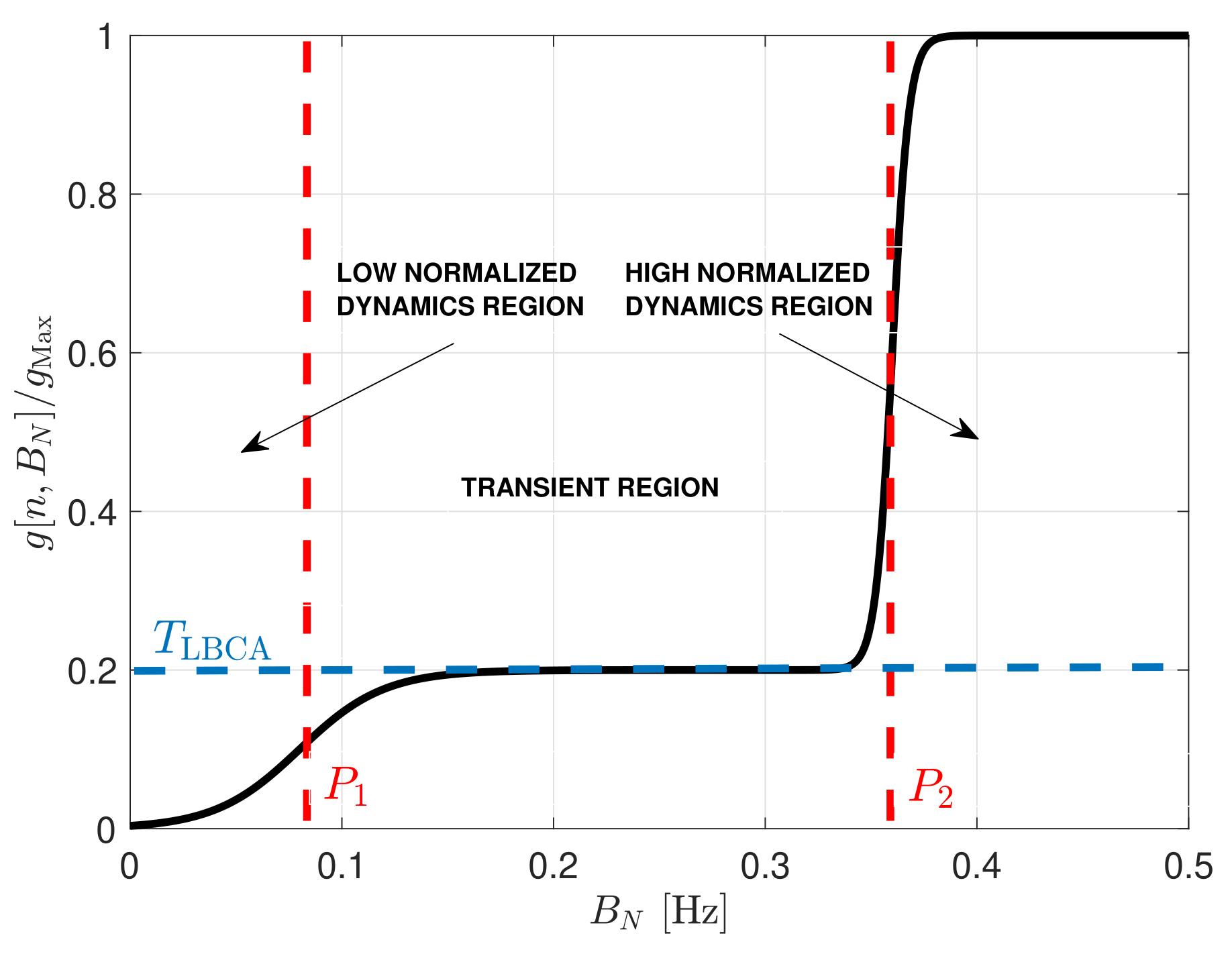
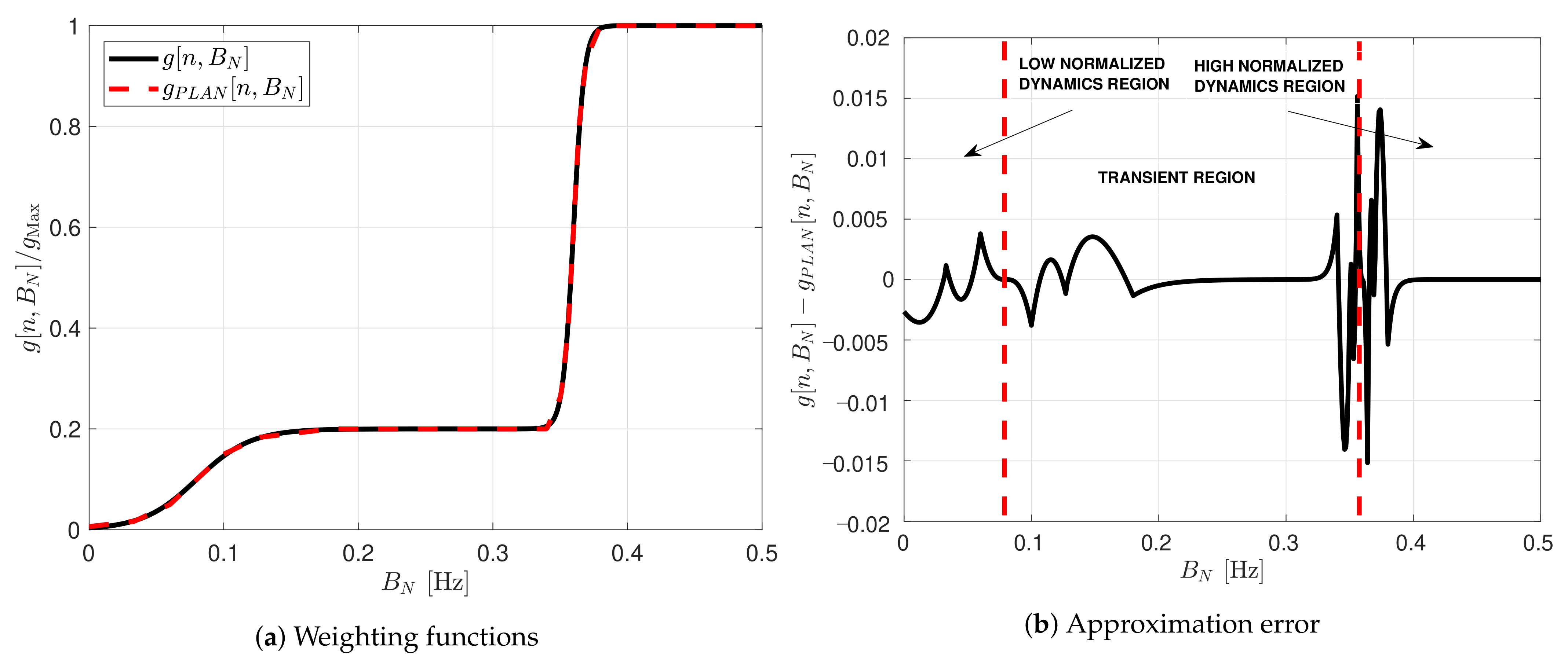
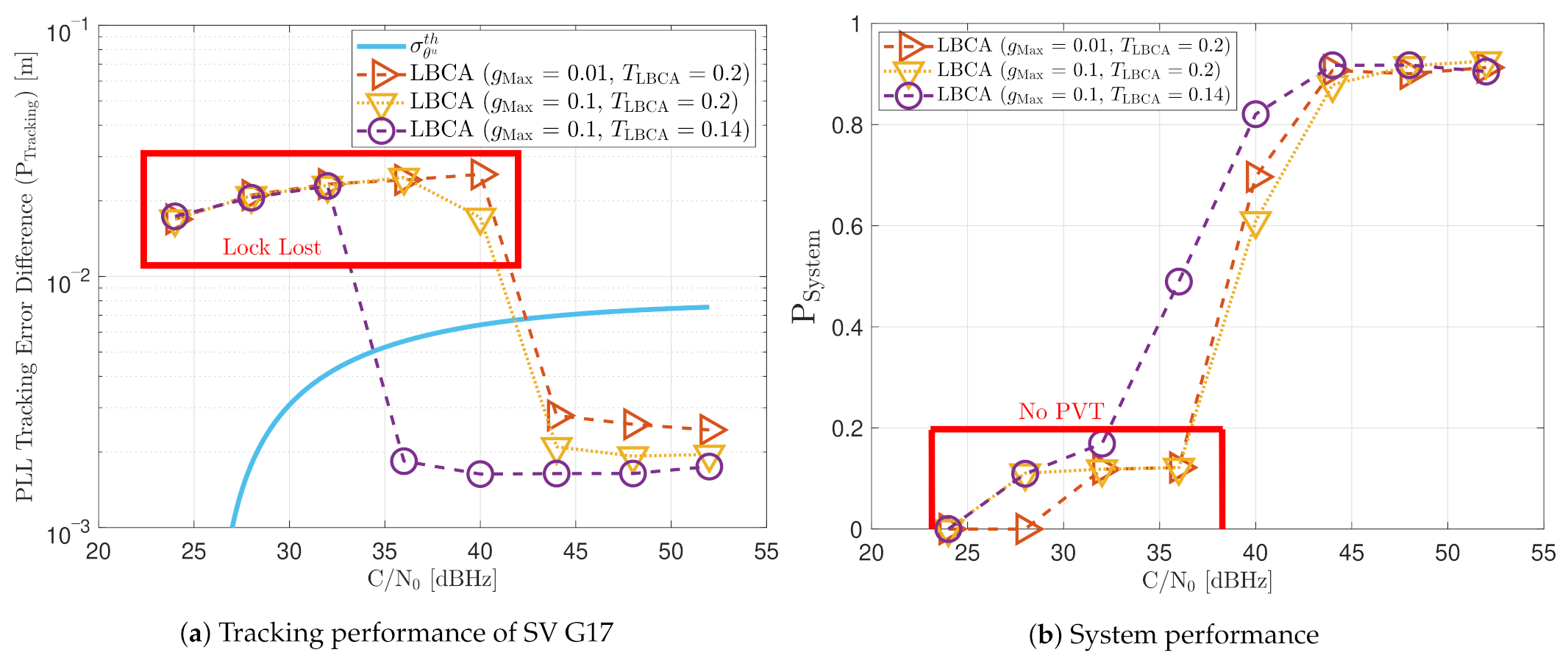
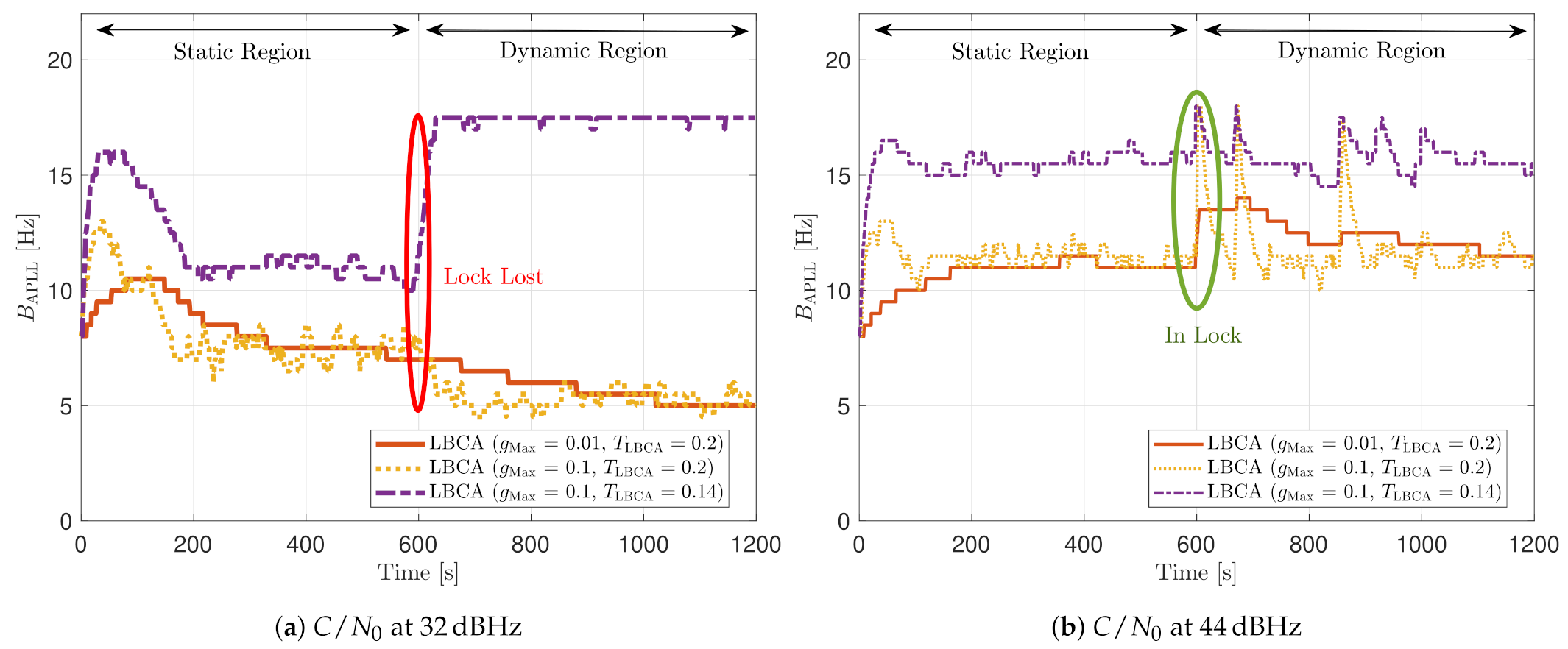
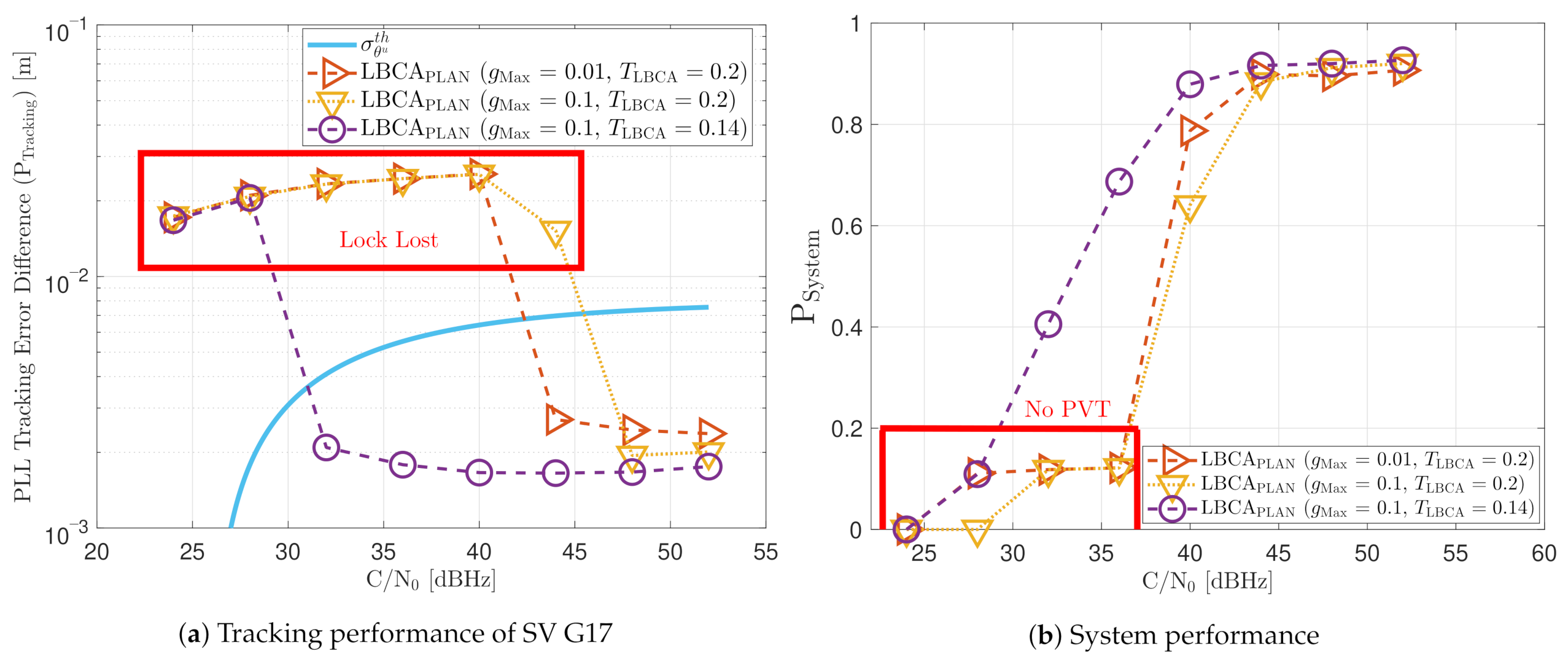
3.3. Loop-Bandwidth Control Algorithm
4. Evaluation Method of Adaptive Loop-Bandwidth Tracking Techniques
4.1. Tracking Performance
4.2. System Performance
4.3. Complexity
5. Experimental Setup
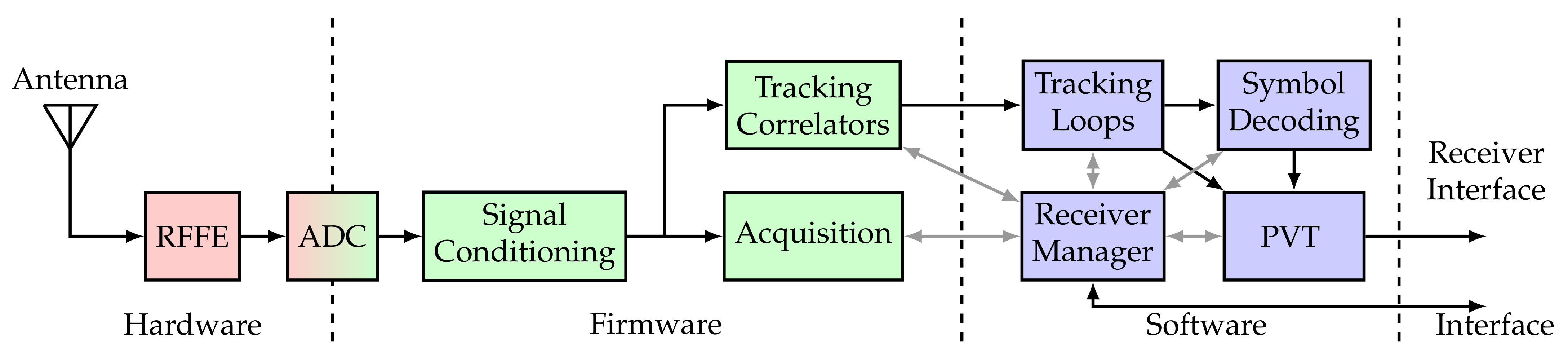
5.1. Receiver and Algorithm Implementation
5.1.1. FAB Configuration
5.1.2. FL Configuration
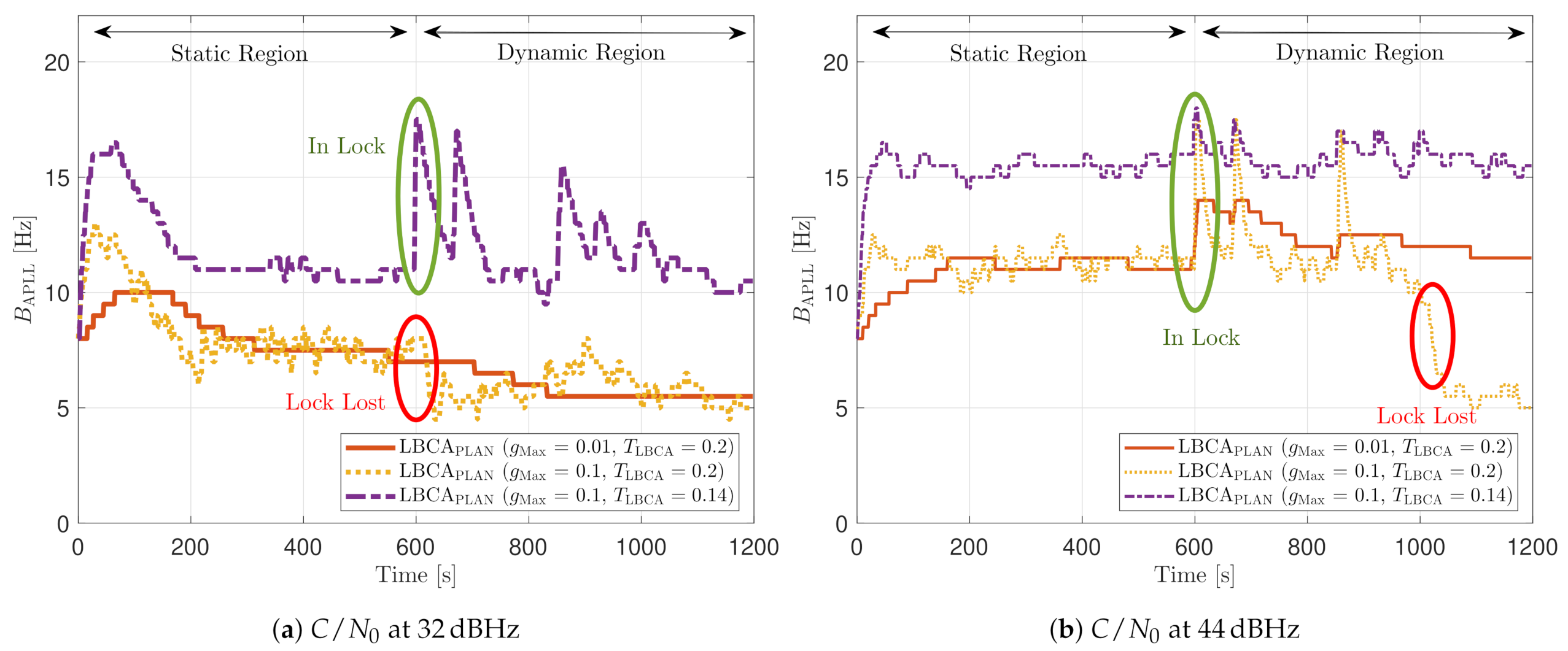
5.1.3. LBCA Configuration
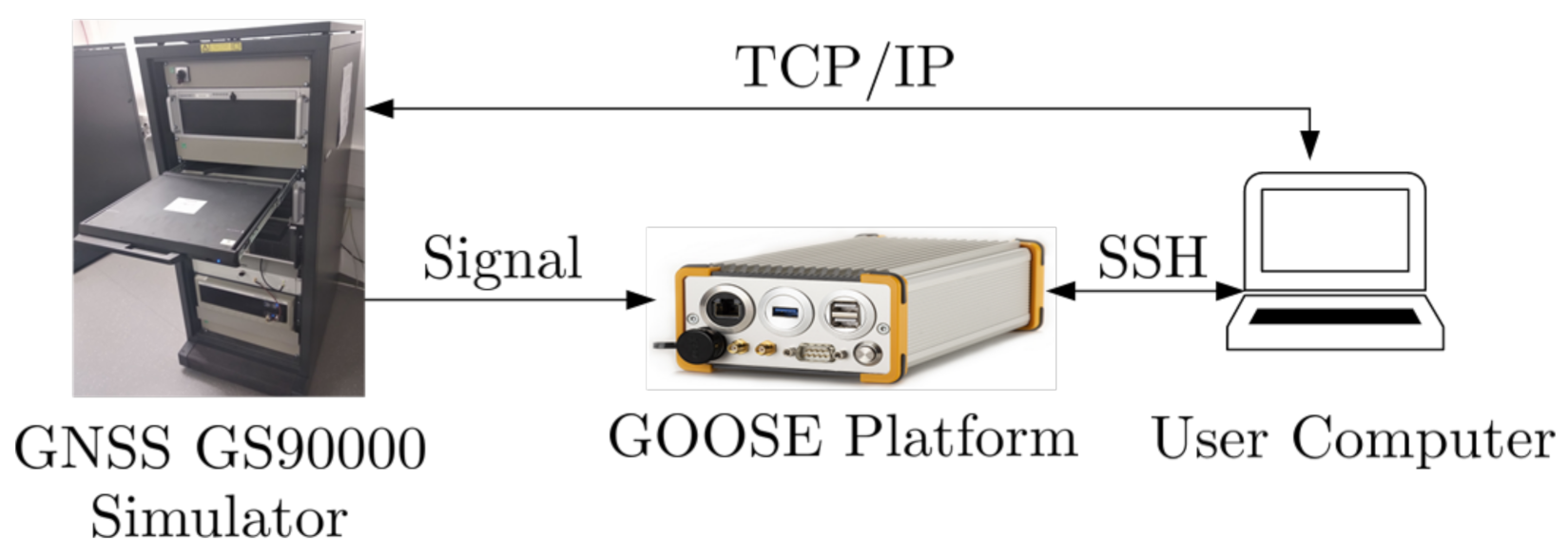
5.2. Evaluation Setup
6. Results
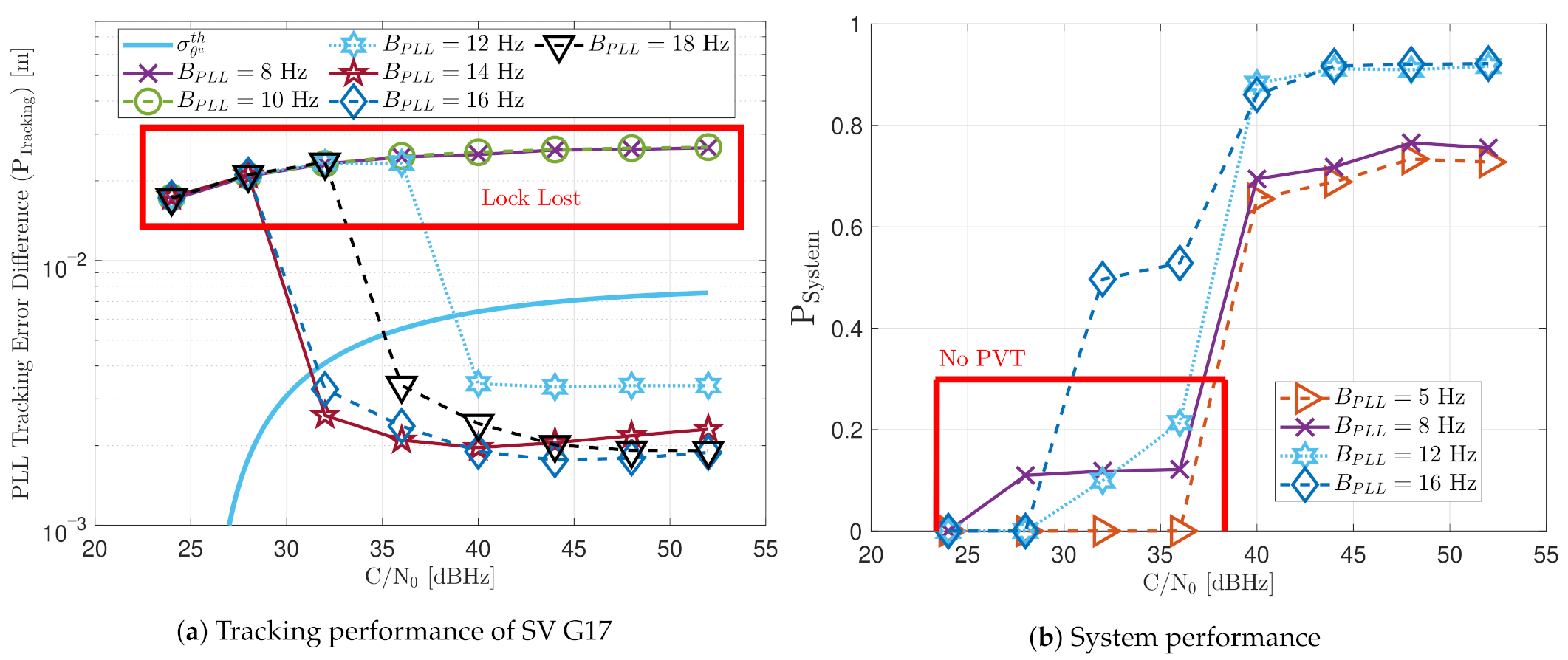
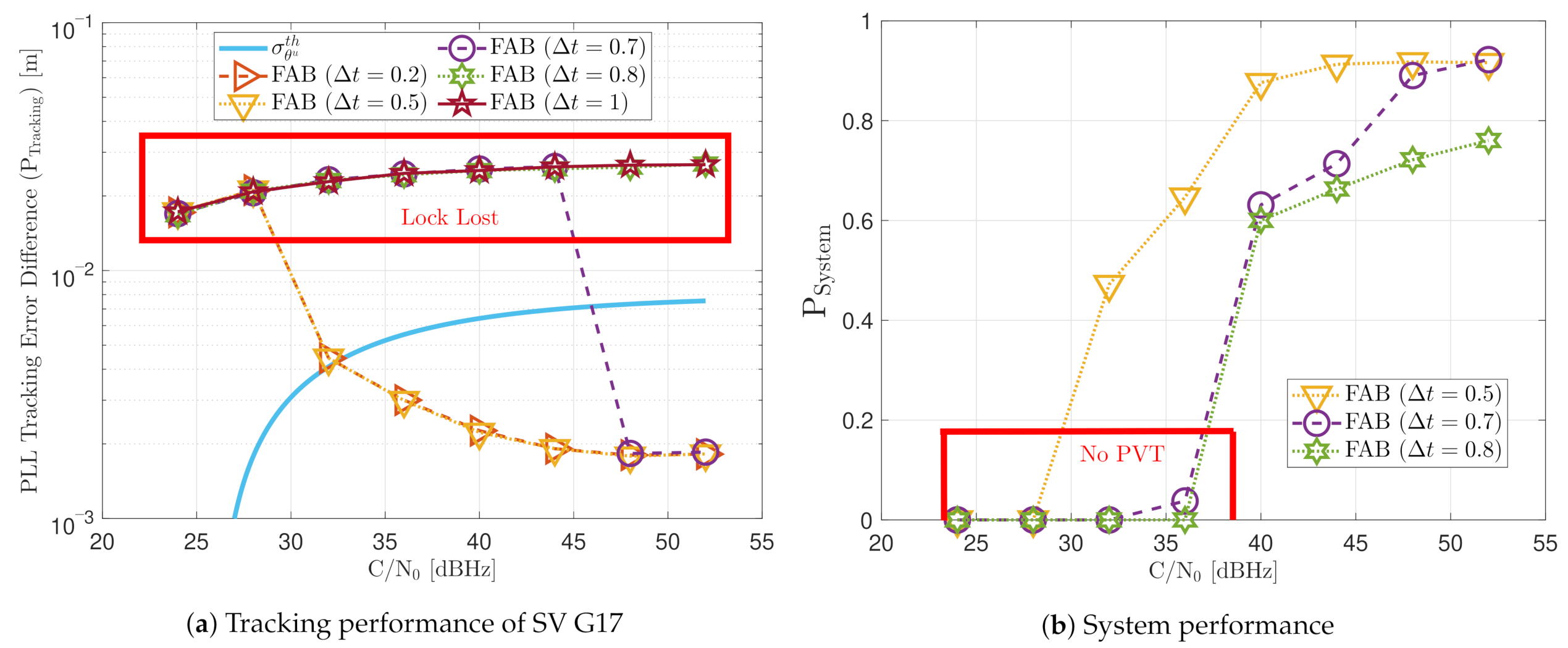
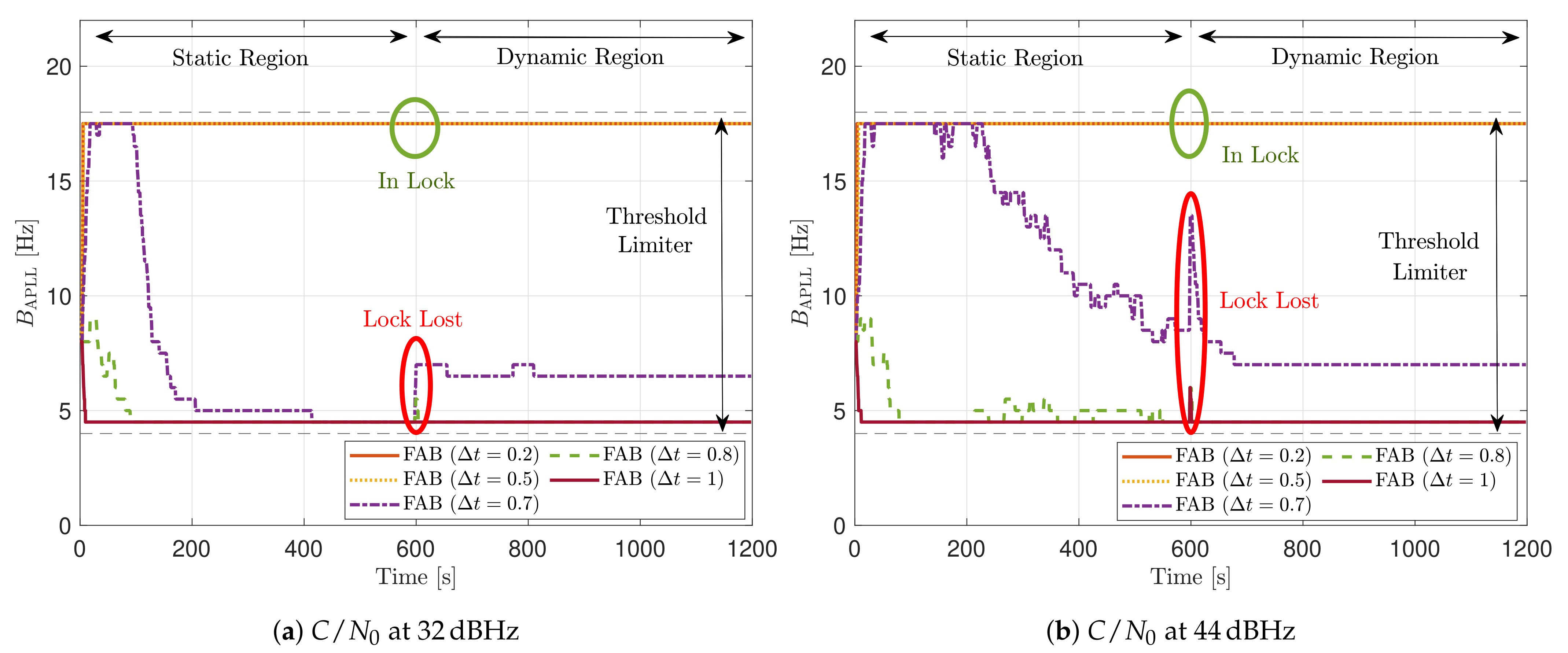
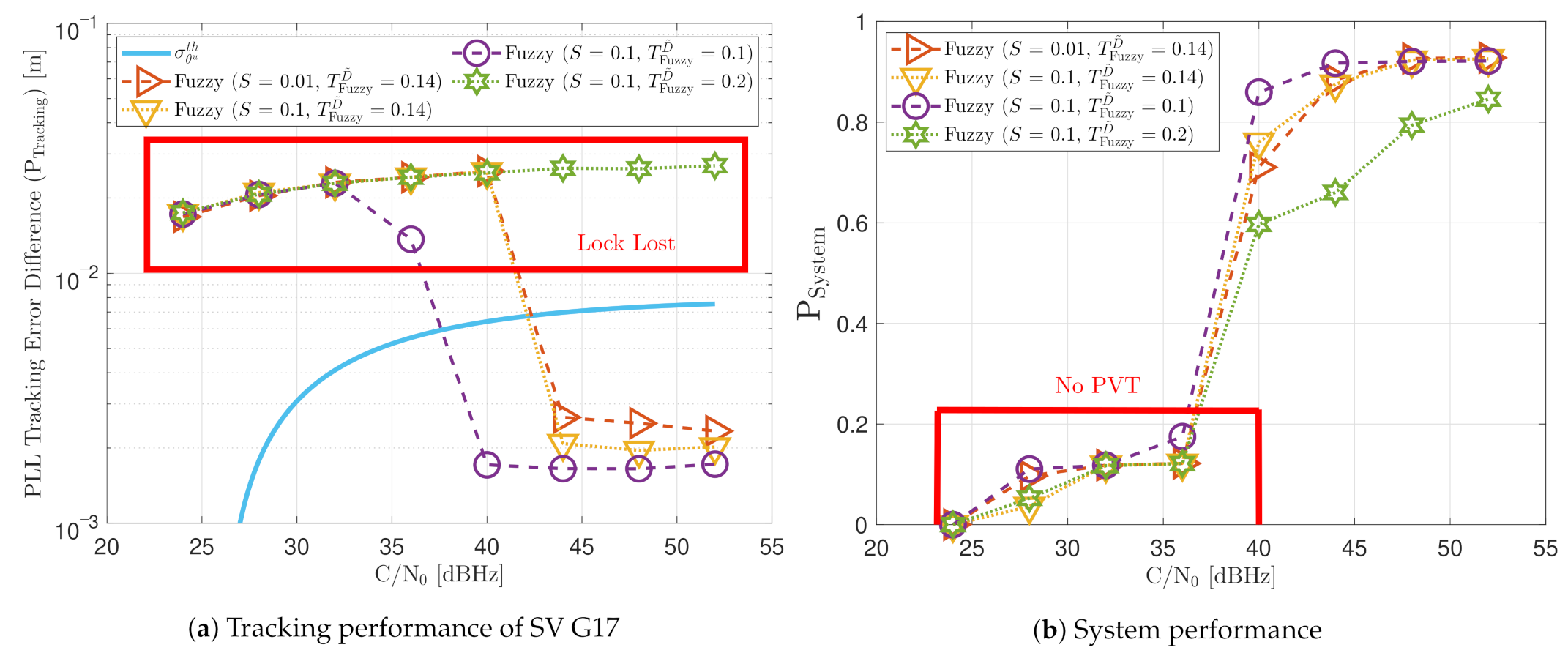
6.1. Static Scenario
6.2. Dynamic Scenario
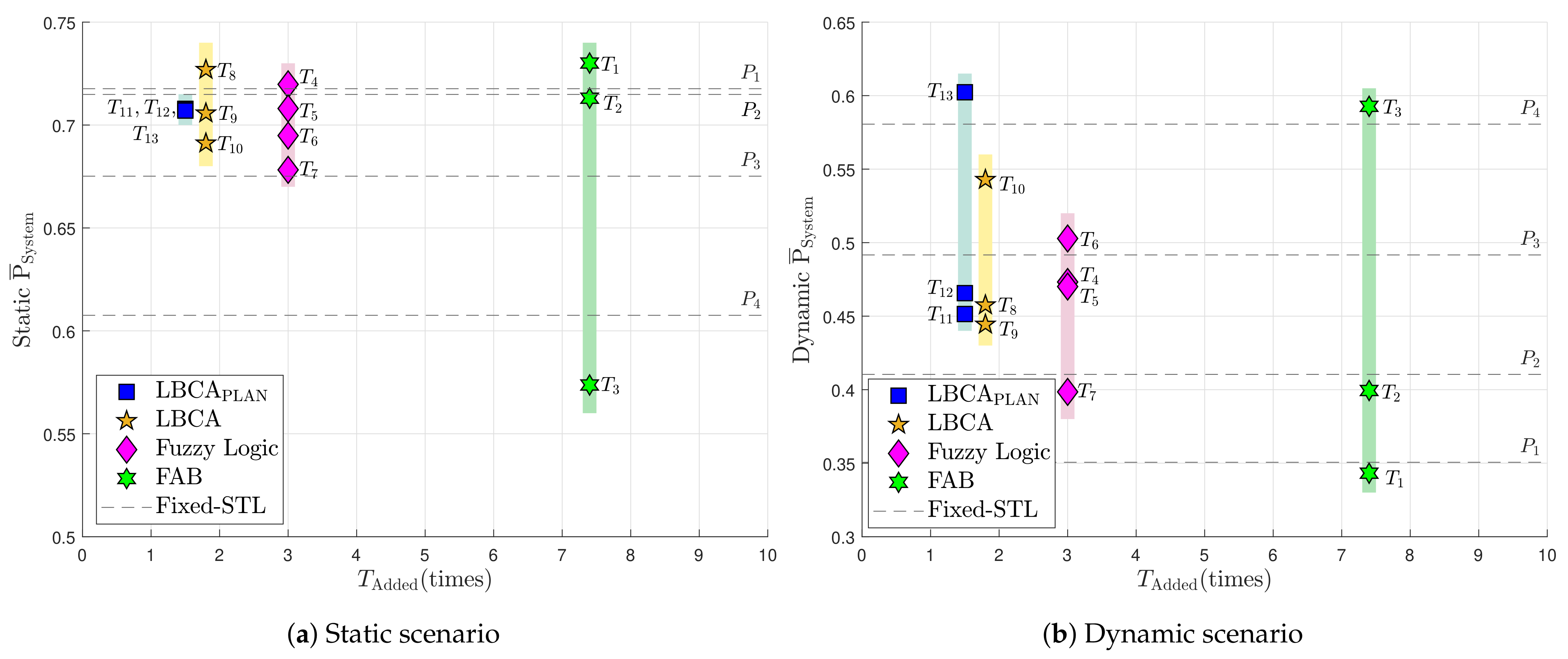
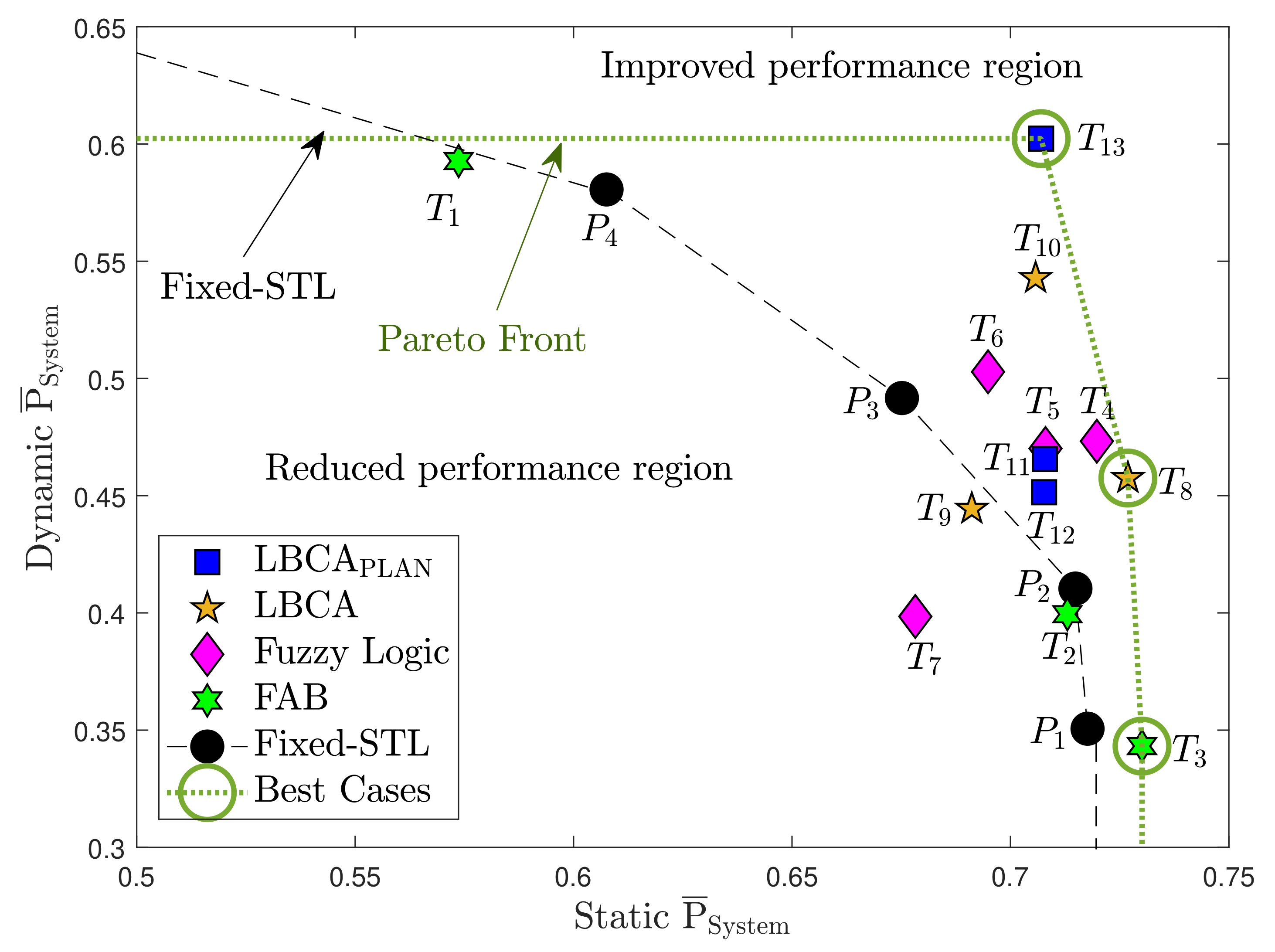
6.3. Total System Performance
6.4. Performance vs. Complexity Comparison
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | analog-to-digital converter |
| BET | backward Euler transform |
| carrier-to-noise density ratio | |
| COG | center of gravity |
| CRB | Cramér-Rao bound |
| DLL | delay locked loop |
| FAB | fast adaptive bandwidth |
| FAP | FLL-assisted-PLL |
| FL | fuzzy logic |
| FLL | frequency locked loop |
| FMM | fuzzy mean method |
| FPGA | field-programmable gate array |
| GNSS | global navigation satellite system |
| GOOSE | GNSS-Receiver with Open Software Interface |
| GPS | Global Positioning System |
| IAD | integration and dump |
| IIR | infinite impulse response |
| IQ | in-phase and quadrature-phase |
| KF | Kalman filtering |
| LBCA | loop-bandwidth control algorithm |
| LOS | line-of-sight |
| NCO | numerically controlled oscillator |
| NLOS | non-line-of-sight |
| OGRP | open GNSS receiver protocol |
| PAD | PLL-assisted-DLL |
| PCIe | peripheral component interconnect express |
| PLAN | piecewise linear approximation of nonlinearities |
| PLI | phase-lock indicator |
| PLL | phase locked loop |
| PVT | position, velocity, and time |
| RFCS | radio-frequency constellation simulator |
| RFFE | radio-frequency front-end |
| SSE | steady state error |
| SSM | state space model |
| STL | scalar tracking loop |
| SV | satellite vehicle |
| TCXO | temperature-compensated crystal oscillator |
| ToA | time of arrival |
| VT | vector tracking |
References
- Kaplan, E.D.; Hegarty, C.J. Understanding GPS: Principles and Applications, 2nd ed.; Artech House Mobile Communications Series; Artech House: Norwood, MA, USA, 2006. [Google Scholar]
- Won, J.; Pany, T. Signal Processing. In Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 401–442. [Google Scholar] [CrossRef]
- Liu, J.; Cui, X.; Lu, M.; Feng, Z. Vector tracking loops in GNSS receivers for dynamic weak signals. J. Syst. Eng. Electron. 2013, 24, 349–364. [Google Scholar] [CrossRef]
- Dietmayer, K.; Saad, M.; Strobel, C.; Garzia, F.; Overbeck, M.; Felber, W. Real time implementation of Vector Delay Lock Loop on a GNSS receiver hardware with an open software interface. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Gardner, F.M. Phaselock Techniques, 3rd ed.; Wiley: New York, NY, USA, 2005. [Google Scholar]
- Jwo, D.J. Optimisation and sensitivity analysis of GPS receiver tracking loops in dynamic environments. IEE Proc. Radar Sonar Navig. 2001, 148, 241–250. [Google Scholar] [CrossRef] [Green Version]
- Cortés, I.; Iñiguez de Gordoa, J.A.; van der Merwe, J.R.; Rügamer, A.; Felber, W. Performance and complexity comparison of adaptive loop-bandwidth tracking techniques. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Stevanovic, S.; Pervan, B. A GPS phase-locked loop performance metric based on the phase discriminator output. Sensors 2018, 18, 296. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vilà-Valls, J.; Linty, N.; Closas, P.; Dovis, F.; Curran, J.T. Survey on signal processing for GNSS under ionospheric scintillation: Detection, monitoring, and mitigation. Navigation 2020, 67, 511–536. [Google Scholar] [CrossRef]
- Skone, S.; Lachapelle, G.; Yao, D.; Yu, W.; Watson, R. Investigating the impact of ionospheric scintillation using a GPS software receiver. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 1126–1137. [Google Scholar]
- Muthuraman, K. Tracking Techniques for GNSS Data/Pilot Signals. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2010. [Google Scholar]
- Legrand, F.; Macabiau, C.; Issler, J.; Lestarquit, L.; Mehlen, C. Improvement of pseudorange measurements accuracy by using fast adaptive bandwidth lock loops. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–23 September 2000; pp. 2346–2356. [Google Scholar]
- Legrand, F.; Macabiau, C. Results of the implementation of the fast adaptive bandwidth lock loops on a real GPS receiver in a high dynamics context. In Proceedings of the International Conference on Global Navigation Satellite System (GNSS 2001), Seville, Spain, 8–11 May 2001. [Google Scholar]
- Chen, Y.; Zheng, H.; Wang, Y. Adaptive bandwidth PLL design based on fuzzy logic control. In Proceedings of the 4th IEEE International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Beijing, China, 1–3 November 2011; pp. 645–648. [Google Scholar] [CrossRef]
- Hangos, K.M.; Lakner, R.; Gerzson, M. Applied Optimization 60. In Intelligent Control Systems: An Introduction with Examples; Springer: New York, NY, USA, 2004; Volume 1. [Google Scholar]
- Cortes, I.; Van der Merwe, J.R.; Rügamer, A.; Felber, W. Adaptive loop-bandwidth control algorithm for scalar tracking loops. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1178–1188. [Google Scholar] [CrossRef]
- Sun, X.; Qin, H.; Niu, J. Comparison and analysis of GNSS signal tracking performance based on kalman filter and traditional loop. WSEAS Trans. Signal Process. 2013, 9, 99–108. [Google Scholar]
- Rao, K.D.; Narayana, J.L. An approach for a faster GPS tracking extended Kalman filter. Navigation 1995, 42, 619–632. [Google Scholar] [CrossRef]
- Shen, J.; Cui, X.; Zhu, Y.; Lu, M. A frequency-compensation algorithm in Kalman filter-based tracking loop for high-dynamics GNSS receivers. In Proceedings of the 2016 International Technical Meeting of the Institute of Navigation (ION ITM), Monterey, CA, USA, 25–28 January 2016; pp. 429–436. [Google Scholar] [CrossRef]
- Lin, W.; Chen, X.; Wang, Y.; He, D. The design of asynchronous Kalman filter-based tracking loop in digital domain. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 3853–3864. [Google Scholar] [CrossRef]
- Susi, M.; Borio, D. Kalman filtering with noncoherent integrations for Galileo E6-B tracking. Navigation 2020, 67, 601–618. [Google Scholar] [CrossRef]
- Won, J.W.; Eissfiller, B. A tuning method based on signal-to-noise power ratio for adaptive PLL and its relationship with equivalent noise bandwidth. IEEE Commun. Lett. 2013, 17, 393–396. [Google Scholar] [CrossRef]
- Won, J.H. A novel adaptive digital phase-lock-loop for modern digital GNSS receivers. IEEE Commun. Lett. 2014, 18, 46–49. [Google Scholar] [CrossRef]
- Overbeck, M.; Garzia, F.; Popugaev, A.; Kurz, O.; Forster, F.; Felber, W.; Ayaz, A.S.; Ko, S.; Eissfeller, B. GOOSE-GNSS Receiver with an Open Software Interface. In Proceedings of the 28th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015. [Google Scholar]
- Seybold, J. GOOSE: Open GNSS Receiver Platform; Technical Report; TeleOrbit GmbH: Nuremberg, Germany, 2020; Available online: https://teleorbit.eu/en/satnav/ (accessed on 10 January 2021).
- Aguirre, S.; Hurd, W.; Kumar, R.; Statman, J. A Comparison of Methods for DPLL Loop Filter Design; Telecommunications and Data Acquisition Progress Report 42–79; Jet Propulsion Laboratory: Pasadena, CA, USA, 1986. [Google Scholar]
- Jury, E.I. Theory and Application of the Z-Transform Methods; Wiley: New York, NY, USA, 1964. [Google Scholar]
- Taylor, C.J.; Young, P.C.; Chotai, A. True Digital Control: Statistical Modelling and Non-Minimal State Space Design; Wiley: New York, NY, USA, 2013; Volume 1. [Google Scholar]
- Humphreys, T.E.; Psiaki, M.L.; Kintner, P.M.; Ledvina, B.M. GPS carrier tracking loop performance in the presence of ionospheric scintillations. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 156–167. [Google Scholar]
- Aguirre, S.; Hurd, W. Design and Performance of Sampled Data Loops for Subcarrier and Carrier Tracking; Telecommunications and Data Acquisition Progress Report 42–79; Jet Propulsion Laboratory: Pasadena, CA, USA, 1984. [Google Scholar]
- Jaffe, R.; Rechtin, E. Design and performance of phase-lock circuits capable of near-optimum performance over a wide range of input signal and noise levels. IRE Trans. Inf. Theory 1955, 1, 66–76. [Google Scholar] [CrossRef]
- Stephens, S.; Thomas, J. Controlled-root formulation for digital phase-locked loops. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 78–95. [Google Scholar] [CrossRef]
- López-Salcedo, J.A.; Peral-Rosado, J.A.D.; Seco-Granados, G. Survey on Robust Carrier Tracking Techniques. IEEE Commun. Surv. Tutor. 2014, 12, 670–688. [Google Scholar] [CrossRef]
- Leekwijck, W.V.; Kerre, E.E. Defuzzification: Criteria and classification. Fuzzy Sets Syst. 1999, 108, 159–178. [Google Scholar] [CrossRef]
- Domingos, P. The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our World; Basic Books, Inc.: New York, NY, USA, 2018. [Google Scholar]
- Alban, S.; Akos, D.M.; Rock, S.M.; Gebre-Egziabher, D. Performance analysis and architectures for INS-aided GPS tracking loops. In Proceedings of the 2003 National Technical Meeting of The Institute of Navigation (ION NTM), Anaheim, CA, USA, 22–24 January 2003; pp. 611–622. [Google Scholar]
- Amin, H.; Curtis, K.; Hayes-Gill, B. Piecewise linear approximation applied to nonlinear function of a neural network. IEE Proc. Circuits Devices Syst. 1997, 144, 313–317. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall Signal Processing Series; Prentice Hall: Upper Saddle River, NJ, USA, 1993; Volume 1. [Google Scholar]
- Betz, J.W.; Kolodziejski, K.R. Generalized Theory of Code Tracking with an Early-Late Discriminator Part I: Lower Bound and Coherent Processing. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1538–1556. [Google Scholar] [CrossRef]
- Cong, L.; Li, X.; Jin, T.; Yue, S.; Xue, R. An adaptive INS-aided PLL tracking method for GNSS receivers in harsh environments. Sensors 2016, 16, 146. [Google Scholar] [CrossRef] [PubMed]
- Bhaskar, S. Exploiting quasi-periodicity in receiver dynamics to enhance GNSS carrier phase tracking. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 2563–2578. [Google Scholar] [CrossRef]
- Josuttis, N.M. The C++ Standard Library: A Tutorial and Reference, 2nd ed.; Addison-Wesley Professional: Boston, MA, USA, 2012. [Google Scholar]
- OProfile Manual. Available online: https://oprofile.sourceforge.io/doc/index.html (accessed on 14 December 2020).
- Taskset(1)—Linux Manual Page. Available online: https://man7.org/linux/man-pages/man1/taskset.1.html (accessed on 14 December 2020).
- Libm. Available online: https://sourceware.org/newlib/libm.html (accessed on 14 December 2020).
- Atkinson, K. An Introduction to Numerical Analysis; Wiley: New York, NY, USA, 1989. [Google Scholar]
- Garzia, F.; Strobel, C.; Overbeck, M.; Kumari, N.; Joshi, S.; Förster, F.; Felber, W. A multi-frequency multi-constellation GNSS development platform with an open interface. In Proceedings of the 2016 European Navigation Conference (ENC), Helsinki, Finland, 30 May–2 June 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Ogrp—The Open Gnss Receiver Protocol. 2016. Available online: https://github.com/Fraunhofer-IIS/ogrp (accessed on 14 December 2020).
- Schmitendorf, W.; Leitmann, G. A simple derivation of necessary conditions for Pareto optimality. IEEE Trans. Autom. Control 1974, 19, 601–602. [Google Scholar] [CrossRef]
- Gandibleux, X. Metaheuristics for Multiobjective Optimisation; Springer: Berlin, Germany, 2004. [Google Scholar]
- Van der Merwe, J.R.; Maasdorp, F.D.V.; du Plessis, W.P.; Linde, L.P. Practical direction-of-arrival system evaluation. In Proceedings of the 2015 IEEE Radar Conference, Johannesburg, South Africa, 27–30 October 2015; pp. 487–492. [Google Scholar] [CrossRef]
- Robust Tracking Techniques Dataset Using GOOSE Receiver. Available online: https://owncloud.fraunhofer.de/index.php/s/LGoWPVtV5xbQ9mB (accessed on 10 January 2021).






































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ZO | PS | PL | ||
|---|---|---|---|---|
| ZO | 0 | >0 | >0 | |
| PS | <0 | 0 | >0 | |
| PL | <0 | <0 | 0 | |
| Tracking Technique | Sub-Module | Number of Operations: | |||
|---|---|---|---|---|---|
| Additions | Multiplications | Divisions | Other | ||
| FAB | Dynamic Stress Estimator | 4 | 6 | 1 | - |
| Three-Sigma FAB | 1 | 11 | 2 | ||
| Gradient Descent | 3 | 1 | 1 | - | |
| Total | 8 | 18 | 4 | 1 | |
| FL | Dynamic/Noise Estimator | 4 | 4 | 2 | - |
| FL Algorithm | 13 | 25 | 0 | - | |
| Total | 17 | 29 | 2 | 0 | |
| LBCA | Dynamic/Noise Estimator | 2 | 1 | 1 | - |
| LBCA algorithm | 4 | 5 | 1 | exp | |
| Total | 6 | 6 | 2 | 1 | |
| LBCA + PLAN | Dynamic/Noise Estimator | 2 | 1 | 1 | - |
| LBCA algorithm | 4 | 6 | 0 | - | |
| Total | 6 | 7 | 1 | 0 | |
| Tracking Technique | Total Time Complexity (s) | Iteration Time Complexity (ns) | Added Time Complexity (Times) |
|---|---|---|---|
| Standard | 18.1 | 60.3 | 1 |
| FAB | 133.7 | 445.8 | 7.4× |
| FL | 55.0 | 183.5 | 3.0× |
| LBCA | 31.9 | 106.4 | 1.8× |
| LBCA + PLAN | 27.8 | 92.8 | 1.5× |
| DLL | FLL | PLL | |
|---|---|---|---|
| Order | 2 | 2 | 3 |
| B [Hz] | 0.1 | 15 | 8 |
| Discriminator | CELP | Diff Atan | Atan |
| ZO | PS | PL | ||
|---|---|---|---|---|
| ZO | 0 | 0.5 | 0.75 | |
| PS | −0.25 | 0 | 0.5 | |
| PL | −0.5 | −0.25 | 0 | |
| Tracking Technique | Configuration | Label | Static | Dynamic |
|---|---|---|---|---|
| Standard PLL | 0.718 | 0.351 | ||
| 0.715 | 0.410 | |||
| 0.675 | 0.492 | |||
| 0.608 | 0.581 | |||
| FAB | 0.8 s | 0.730 | 0.343 | |
| 0.7 s | 0.713 | 0.399 | ||
| 0.5 s | 0.574 | 0.593 | ||
| FL | , | 0.720 | 0.473 | |
| , | 0.708 | 0.470 | ||
| , | 0.695 | 0.503 | ||
| , | 0.678 | 0.398 | ||
| LBCA | , | 0.727 | 0.458 | |
| , | 0.691 | 0.444 | ||
| , | 0.706 | 0.543 | ||
| LBCA + PLAN | , | 0.708 | 0.466 | |
| , | 0.708 | 0.451 | ||
| , | 0.707 | 0.602 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cortés, I.; van der Merwe, J.R.; Nurmi, J.; Rügamer, A.; Felber, W. Evaluation of Adaptive Loop-Bandwidth Tracking Techniques in GNSS Receivers. Sensors 2021, 21, 502. https://doi.org/10.3390/s21020502
Cortés I, van der Merwe JR, Nurmi J, Rügamer A, Felber W. Evaluation of Adaptive Loop-Bandwidth Tracking Techniques in GNSS Receivers. Sensors. 2021; 21(2):502. https://doi.org/10.3390/s21020502
Chicago/Turabian StyleCortés, Iñigo, Johannes Rossouw van der Merwe, Jari Nurmi, Alexander Rügamer, and Wolfgang Felber. 2021. "Evaluation of Adaptive Loop-Bandwidth Tracking Techniques in GNSS Receivers" Sensors 21, no. 2: 502. https://doi.org/10.3390/s21020502
APA StyleCortés, I., van der Merwe, J. R., Nurmi, J., Rügamer, A., & Felber, W. (2021). Evaluation of Adaptive Loop-Bandwidth Tracking Techniques in GNSS Receivers. Sensors, 21(2), 502. https://doi.org/10.3390/s21020502