1. Introduction
Unmanned aerial vehicles (UAVs) are gaining popularity in civil, commercial, and military services due to their mobility, flexibility, and ease of deployment. Given the fact that without holding valid spectrum licenses, most UAVs operate on the industry, scientific, and medical (ISM) band [
1] or a mixture of those bands. Lacking the monitoring of the spectrum utilization leading to more spectrum conflicts toward existing users, the supervision of UAV communication behavior is major challenge in the federal aviation administration (FAA) [
2]. Meanwhile, the multi-link operational concept (MLOC) [
3] applied for the heterogeneous aeronautical network, such as the dual links with SatComm and cellular link [
4], and mmWave with cmWave [
5], is promising to increase the communication resilience. Moreover, MLOC ensures the reliability of UAV operations at the cost of the occupying multiple heterogeneous link resources dynamically.
The conventional aeronautical communication including the backhaul transmission typically applies static link solutions. The aeronautical telecommunication network (ATN) standard regulated by the international civil aviation organization (ICAO)is mostly adopted to support the aircraft ground-to-ground (G2G), air-to-ground (A2G) and avionic data exchange [
6]. The TCP/IP suite of protocols and open systems interconnection (OSI) protocol stack are used to form the prototype ATN. Some ATNs are highlighted, such as the controller pilot data link communications (CPDLC), automatic dependent surveillance (ADS), flight information service (FIS), and data link in aircraft communications addressing and reporting system (ACARS) [
7]. Nevertheless, the above solutions are originally designed for licensed operators and the access procedures are complex for UAVs. Additionally, the typical ATN is difficult to embrace heterogeneous UAV platforms and multiple data link types resulted by the mission-driven feature. Some common links are highlighted: short-range links of Bluetooth, Wifi, Zigbee/Xbee, WiMAX, UWB; medium-range link of AeroMACs; and long or worldwide range services of GSM, LTE, SatComm. Given the fact that no dominant regulations exist in the diverse communication links [
2], there is a need of re-thinking the current ATN solution and proposing an integrated communication solution for UAV control and non-payload communications (CNPC) data links.
To achieve the sufficient exploitation of spectrum resources and manage the collaborative communication among multiple UAVs, two feasible technologies in the cognitive communication are highlighted. The the opportunistic spectrum access (OSA) aims at addressing the spectrum access problem, while the spectrum sharing is for coordinating spectrum resources among multiple users. The above approaches are successfully applied in cognitive radio networks (CRNs), vehicle-to-everything (V2X), Internet of things (IoTs), and cellular networks [
8].
OSA allows secondary users, i.e., UAVs in this case, to occupy spectrum resources in an opportunistic manner under a presumption of causing non-interference to primary users. As an interweave mode in CRN concept [
9], typical OSA employs a listening-before-transmission mechanism [
10], where the spectrum sensing phase is required before each transmission to protect PUs [
10,
11,
12]. The authors in [
11] proposed an efficient spectrum sensing enabled OSA scheme for the ultra-dense operations, and discussed the determination of spectrum processing time where the priority control mechanism is employed. The authors in [
12] investigated the trade-off problem between the saturation throughput and sensing time, where the optimization of spectrum sensing time is addressed by fusing collaborative sensor outcomes.
Dynamic spectrum allocation or assignment schemes for the spectrum sharing is extensively studied especially under the TV bands [
13]. The spectrum allocation can be grouped into two categories, i.e., the central authority based structure and distributed structure [
14]. The centralized communication networks require a coordinator and are enabled with an exclusive common control channel for delivering the access or the scheduling model. For instance, authors in [
13] presented a channel assignment scheme in the link layer utilizing the layer graph to achieve a global optimized performance. Authors in [
15] presented a modified game theory approach for maximizing the spectrum resources on account of the priority of sensing data and reduction of spectrum handoff. On the other hand, the distributed spectrum allocation requires a reporting and negotiation phase before each transmission to tackle the contention problem and avoid internal collisions. Some methods are highlighted, such as the exhaustive search enabled overlapping algorithm for the contention resolution [
16], joint pricing enabled with the game theory for the collaborative spectrum allocation [
17], and a size-negotiable auction-based allocation scheme [
18]. Given the constraint computation power in the UAV processors, the computation loads can be mitigated with the centralized communication scheme. In specific, the link scheduling and link collision avoidance are offloaded to the terrestrial stations from the airborne.
The media access control (MAC) controls the hardware and makes the frequency or channel hopping (link hopping in this case) possible. Several capabilities can be achieved in the MAC layer, such as the optimization of the energy consumption, overhearing, and channel idle listening mechanism for determining the presence of signals and the quality of service (QoS) improvement. Authors in [
19] firstly presented a synchronous duty cycle management scheme of Sensor MAC for the energy optimization purpose. The authors in [
10] proposed a two-layer MAC scheme, i.e., CR-ALOHA based MAC protocol for the OSA scheme by applying the random access scheme in selecting channels and considering imperfect spectrum detectors. Authors in [
20] presented a MAC design for the mesh networks with an integration of the energy awareness and routine algorithm. However, the above works neither lack the consideration of the spectrum sharing scheme nor assume to implement the spectrum sharing on-board. Therefore, the offloaded spectrum sharing based MAC layer is needed.
As a cross-layer protocol initially designed for autonomous vehicles, MAVLink has been successfully used in several autonomous systems, e.g., APM, Pixhawk, DJI, Mikrokopter, YUNEEC, Micropilot, micro unmanned systems, and Parrot (Ar.unmanned system) [
21]. Two mechanisms exist in the conventional MAVLink, i.e., the delivery of command, control and communication (C3) messages, and the heartbeat message for the periodic monitoring purpose. In our case, providing the offloaded spectrum sharing, the communication scheme generated in the ground control stations (GCSs) needs to be forwarded to UAVs, hence the MAVLink data structure also demands to be modified for our case.
With the above remarks, this paper aims at presenting a synthesized resource allocation and opportunistic link selection (RA-OLS) scheme for supporting multiple links and delivering command and control (C2) messages for the air-to-ground (A2G) communication. RA-OLS enables the dynamic management of RF resources and allows for the opportunistic access in a sequential manner so as to facilitate the UAV operation under the spectrum scarce environment. UAVs envision to have multiple transmitters along with spectrum detectors to identify the vacancy of the link to prevent the collision, while the link selection and scheduling is implemented in GCSs. Spatial and temporal spectral information is processed, and the link scheduling resolutions, i.e., link hopping sequences (LHSs), are generated by a link allocation algorithm. LHSs are packed with time labels into the MAVLink data structure, and uploaded to UAVs through a predefined common control forward link. Enabled with a link-hopping based MAC protocol, UAVs start the data transmission in accordance with the uploaded LHSs.
The RA-OLS is a synthesized solution which embraces multiple methods, e.g., the link selection, OSA, and resource allocation. Different from the traditional link selection research, the time-varying feature is considered, hence the link resources are modeled as link opportunities in the frequency and time domain. Distinct from the OSA enabled communication or the resource allocation enabled communication, this paper aims at addressing the problems of when which and how links with high quality of service (QoS) are used for the UAV operations. The contribution of this paper is to propose and model a centralized link sharing based communication solution for UAV applications, where the link allocation, link access, upload link effect, and spectrum sensing effect are considered. Several features are highlighted with the proposed RA-OLS scheme.
We derive a mathematical performance model in terms of throughput for the RA-OLS scheme which can be used for the spectrum dense and scarce environments. Several aspects are integrated in the model, such as the link allocation algorithm, decision fusion with multiple on-board spectrum detectors, re-sensing scheme considering non-ideal spectrum detectors, and packet dropout rate among common control links. A Markov based Gilbert-Elliott model is presented for estimating the packet drop in uplinks, where the Ricean fading is used for modeling the channel environment. Statistics theory is used in the derivation. Moreover, we present an interference factor () as the outrage probability to measure how UAVs cause interference to other existing users.
A lightweight cross-layer protocol is proposed which is modified from the MAVLink for uploading the LHSs to UAVs. A spectrum sensing based MAC protocol is presented for enabling the opportunistic link selection with the re-sensing policy.
An efficient greedy based spectrum allocation algorithm is developed to accelerate the computation and enables the spectrum sharing with QoS and fairness fitting among UAVs.
The rest of this paper is organized as follows:
Section 2 presented the proposed RA-OLS communication scheme along with the corresponding technical solutions.
Section 3 denotes mathematical models towards the proposed RA-OLS system. Numeral simulations are presented in
Section 4 following by the conclusions in
Section 5.
2. System Architecture and Technical Design
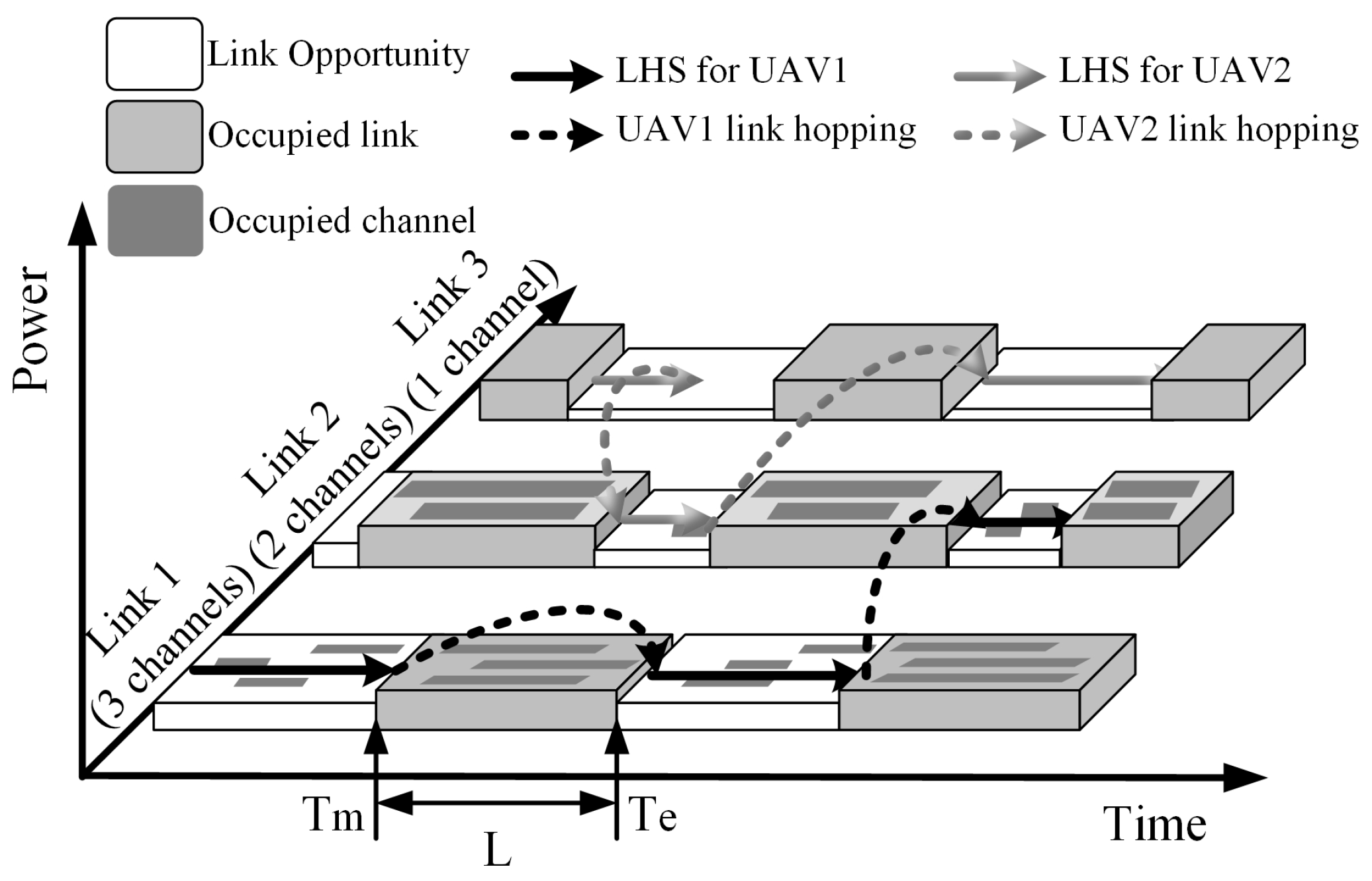
A conceptual diagram for the RA-OLS scheme is shown in
Figure 1. The PU traffic model which reveals the occupancy information in wide bandwidth is represented as a binary ON/OFF model [
22]. Given the time-varying feature in the spectrum, white blocks form a link opportunity set
I aiming to be used by UAVs. The dark blocks are the congested links that need to be avoided in the utilization. The solid lines with arrows are the desired LHS schemes
, and the virtual lines represent the link-hopping maneuver between
I.
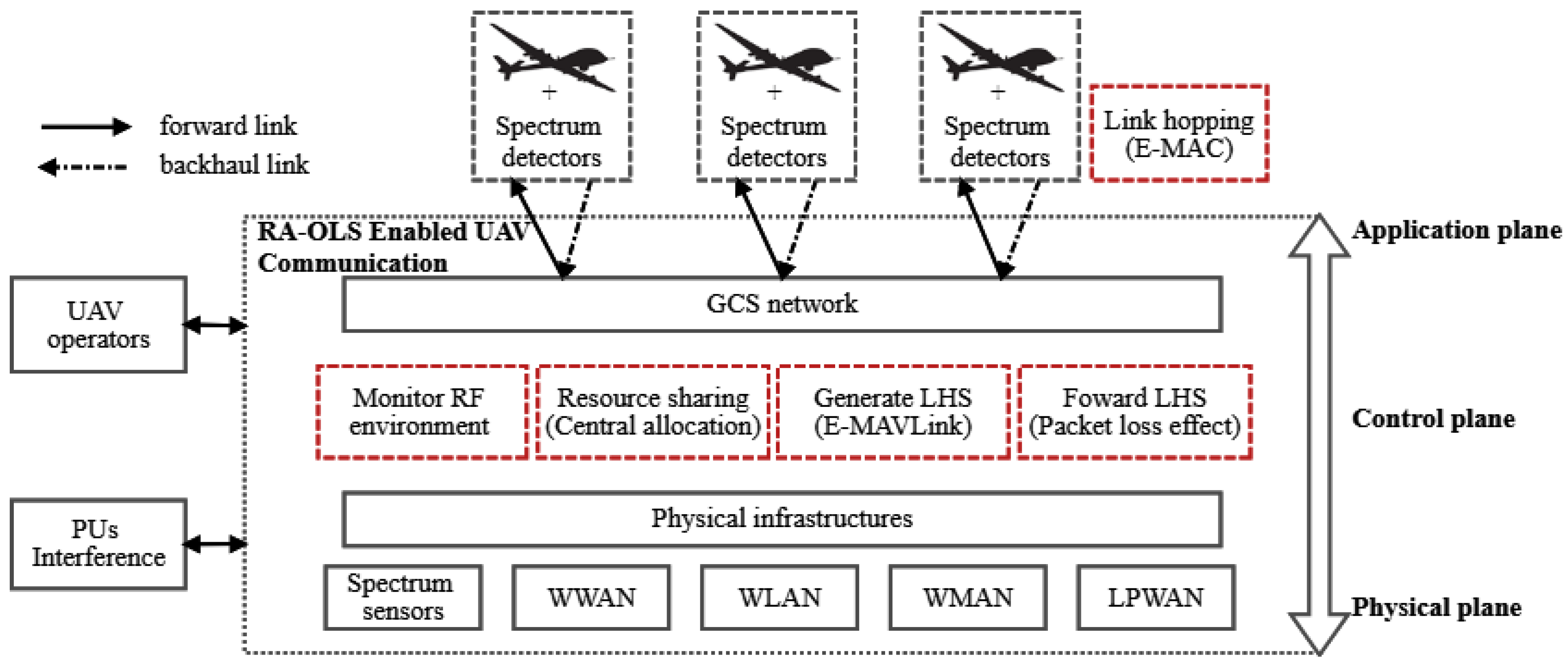
Enabled with the presented link-hopping concept, the RA-OLS based UAV communication diagram is illustrated in the
Figure 2, where some fundamental components are:
K UAVs equipped with
M transmitters, GCS network, spectrum detectors deployed among UAVs for acknowledging the PU vacancy, spectrum sensors deployed in terrestrial for collecting the PU traffic pattern information, and some general terrestrial infrastructures denoting the existing heterogeneous networks, such as wireless wide area network (WWAN), wireless local area network (WLAN), wireless metropolitan area network (WMAN) and low power wide area network (LPWAN).
Given some unique features existing in the RA-OLS scheme, such as the offloaded spectrum processing, central resource management, and dynamic access to heterogeneous links, some exclusive functions are highlighted in red virtual boxes, for instance monitoring RF environment, resource sharing, creating LHSs, forwarding LHSs, and link hopping function in the airborne.
With an assumption that PUs are unknown in prior, the spectrum processing is critical to obtain the real-time PU traffic information in the function of monitoring RF environment, where several detection, identification, and prediction methods [
23,
24] were proposed. Based on the extracted PU features, the resource sharing function enables the collaborative occupation of spectrum resources among UAVs, where the contention issue is mitigated in such a centralized mechanism. Along with the C2 messages received from UAV operators, the LHSs are segmented into multiple frames, packed with the unified data structure, and forwarded to UAVs, where the packet dropout effect is critical because of unreliable upload links and lacking static backhaul link solutions. The link hopping function conducted among UAVs is to implement the data transmission through multiple links, whilst the link establishment and maintenance in the current link solutions are not considered.
In specific, three technical gaps are put forward: (1) how to transmit the link opportunity information to individual UAVs; (2) how to allocate link opportunities over multiple UAVs in an equal manner; (3) and what is the MAC layer like given the link hopping function. The technical solutions are provided to address the above gaps to form a prototype scheme, i.e., the extended MAVLink (E-MAVLink), the enhanced MAC (E-MAC), and the link resource allocation algorithm.
2.1. Extended MAVLink
We assume that the link access is triggered by the time and event, and link opportunities
I are characterized by the start time
, end time
, duration of the link opportunity
, and a quality factor
Q. Only
,
, and link identifier need to be uploaded to UAVs, while the link quality is estimated on-board with spectrum detectors. Multiple link opportunities are formed as an LHS. A completed LHS set may be separated into multiple data frames when the opportunity number exceeds the maximum number of
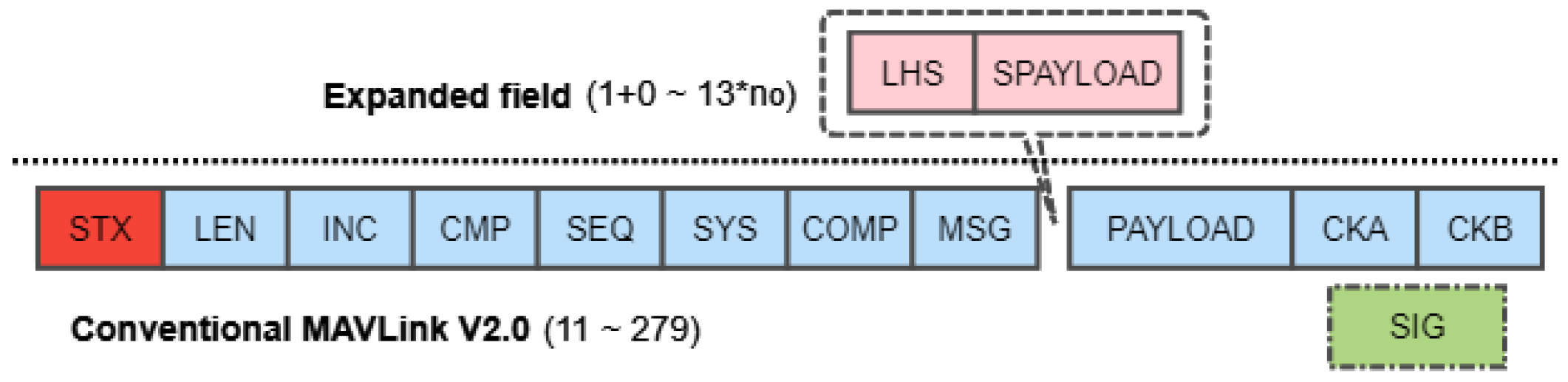
. Developed from the MAVLink protocol [
21], the proposed E-MAVLink frame structure is presented in
Figure 3 with its explanations clarified in the
Table 1.
Distinct from the typical MAVLink protocol, two additional fields, i.e., NLHS and SPAYLOAD, are appended before the payload of data. The NLHS is the number of LHS packet in this frame, and SPAYLOAD represents the specific content of LHS messages consisting of a link identifier, start time stamp, and end time stamp. The link identifier has 1 byte size, hence the hardware limitation of
is
. The time stamps are unified into the same format with the fixed size of 6 bytes resulting in 13 bytes opportunity size. Consequently, the length of the E-MAVLink frame is extended from the traditional range of
[
21] to
bytes.
2.2. Enhanced MAC
The proposed E-MAC is developed from a two-stage slotted CR-ALOHA MAC layer [
10]. Some distinctions are highlighted, for instance, the slotted CR-ALOHA MAC demands a periodic detection of the PU presence, whilst such periodicity is not reflected in the RA-OLS scheme; the CR-ALOHA MAC develops the random access within the determined time intervals, whilst the link selection function is offloaded in GCSs; the data frame length is fixed in the CR-ALOHA, whilst it is dynamic according to the PU traffic pattern among links; the CR-ALOHA MAC implements the hopping between the frequency or channels in interest, while the E-MAC switches between diverse links enabled with multiple detectors and fusion method. Moreover, the re-sensing mechanism with the MAX-N-RS policy [
25] is considered in the E-MAC with the consideration of non-ideal spectrum detectors.
We define the symbol
as the extracted sets of link opportunities from LHSs with the labeled start time
and end time
as elements.
represents the first element of
.
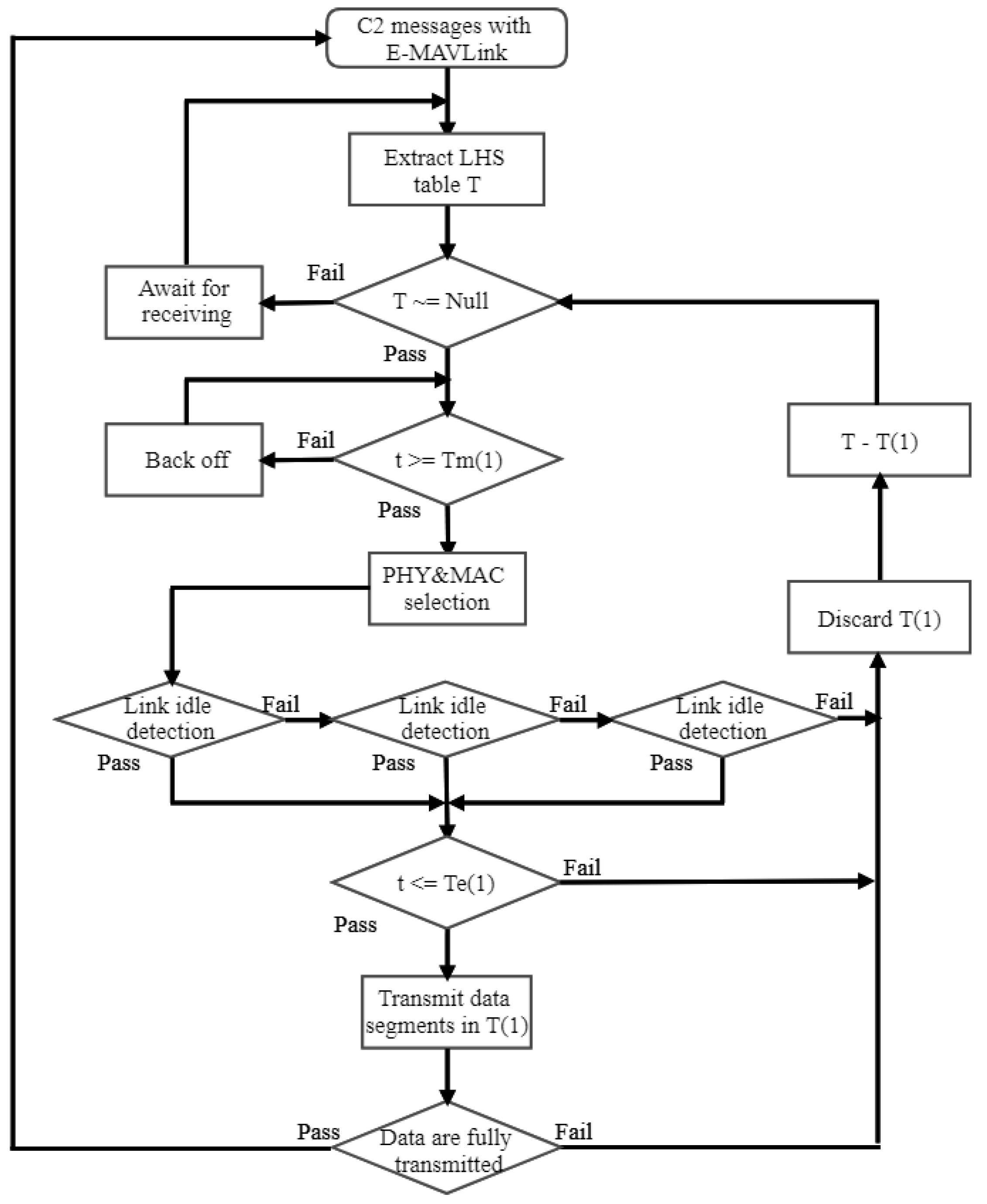
t is the current processing time. The framework diagram of the proposed E-MAC layer is shown in
Figure 4.
As depicted in
Figure 4, the execution of E-MAC is processed as follows:
Considering the case of delay in retrieving the LHS set , some LHSs are removed firstly following the equation: , where the function is to find elements in the dataset, and the operation of ‘−’ denotes the removal of elements from the dataset.
The operation remains awaiting until it is triggered by the start time, where the time synchronization problem can be solved by the coordination function in SUs [
10].
Given the collaborative sensing result with multiple spectrum detectors, UAVs detect the occupation status among links in interest before performing the transmission. If the link is determined to be idle, the request data will be transmitted within the remaining time. Otherwise, the spectrum detectors would keep sensing for the maximum of R times to acquire the availability of PUs.
Only when the current time t is within the opportunity duration, i.e., , this opportunity is used, where t is affected by the re-sensing time and the MAC processing time .
It is noted that this E-MAC layer aims at addressing the problem of the time-event triggered link access with a unified scheme. Some unique link maintenance and establishment mechanisms, e.g., request to send (RTS), clear to send (CTS), and acknowledgment (ACK) [
25] are negligible in the E-MAC design and analysis.
2.3. Link Resource Allocation
The allocation of link resources runs in GCSs and is critical in managing spectrum resources among multiple UAVs. Two objectives are considered in the allocation, i.e., the allocation of link opportunities with the best quality and maximizing the link occupation time among UAVs. As discussed in
Section 2.1, the link opportunities are characterized by the start time
, end time
, and a quality factor
Q, where
Q denotes channel properties, e.g., scattering, fading, and power decay, and can be obtained from channel state information (CSI) through heartbeat messages. The duration of link opportunity is obtained:
. We define the utilization rate
. The maximization of LHS
can be addressed by solving the following objective function:
It is noting that when which means the time length for the optimization is equivalent to the time of predicting PU patterns, the communication reaches the maximal throughput values by using the spectral resources sufficiently.
Given the time-varying feature in the
, we firstly make the following assumptions before addressing the function (
1): (1) each link opportunity can only be allocated to one UAV; (2) UAV cannot switch to another link before finishing the current opportunity; and (3) the link opportunity can be accessed intermediately.
This paper presents an achievable sub-optimal algorithm, i.e., the
-greedy resource allocation algorithm developed from our previous work in [
26]. Some advantages are highlighted, such as the low complexity, feasibility in adding constraints, and convenience in modeling.
The optimization of
U is substituted with two cases: (1) minimizing the time interval
between the start time
and the end time
of the resource in the
step, and (2) maximizing the remaining time duration
between the end time
of the resource in the
step and the end time
of the resource in interest. Moreover, regarding the purpose of leveraging resources among multiple
K UAVs, a fairness fitting factor is integrated by summarizing the allocated resource length
. To this end, a monotonous differential objective function at the iteration
s for the
UAV is formulated as:
where
and
represent the discount weight for minimizing the time gap and balancing allocation results among UAVs with values ranging in
.
and
are the coefficient weights.
n and
i are the index of link
and set of link opportunities
, respectively. The
summarizes the resources weighted by
for
UAV.
Given a pre-known
for the
UAV, a general framework of the
-greedy based link resource allocation strategy for one iterative processing is presented in the Algorithm 1 [
26].
When having a small
value, it might be possible that one link opportunity is allocated to multiple UAVs, thus the algorithm demands an avoidance mechanism to manage the spectrum and prevent collisions among UAVs. Specifically, only the UAV with the highest
value is allocated to the opportunity. It is noted that the time effects, e.g., delay in the E-MAC progressing, and multi-sensing period, are not considered during the allocation phase. Moreover, given that one LHS consists of multiple iterative steps and the fairness fitting factor in the Equation (
2) consists of an accumulative value of
, an appropriate selection of the accumulative length is critical to leveraging different effects in
by way of periodic clearance of the template accumulative parameter.
| Algorithm 1 Pseudo-code of Greedy Based Algorithm for Time Sequence Resource Allocation |
- 1:
Initialization of parameters - 2:
whiledo - 3:
Calculate the differential objective function towards k UAV with the closest link opportunity in the time domain. - 4:
Select a flexible threshold value according to the maximum value of objective functions. - 5:
Find link opportunities for each UAV that satisfies . - 6:
if Only one UAV is allocated to this opportunity then - 7:
Save link opportunity to UAV. - 8:
Remove elements in when . - 9:
Update parameters. - 10:
else - 11:
Save link opportunities with the maximum value to UAV. - 12:
Remove elements in when . - 13:
Update parameters. - 14:
end if - 15:
end while - 16:
return
|
3. Modeling and Analysis
Due to lacking theoretical models for allocation algorithms, especially with sub-optimal algorithm, this section aims at presenting a mathematical model for RA-OLS with unknown spectrum allocation performance. Moreover, several aspects are considered in the model, e.g., the imperfect spectrum detectors with the probability of false alarm and miss detection, the unreliable forward links resulting in packet dropoutes, and delays in the E-MAC leading to the repeat sensing of PU states. A saturation throughput is modeled, along with an interference factor () presented to measure the interference degree towards other PUs.
We assume that the active (run) state
in the PU transmission and the inactive state (burst) state
both follow exponential distributions [
27] with the cumulative distribution functions (CDFs) of
and
, where
and
are the averaged active length and inactive length of the PU traffic, respectively. The estimation for
and
can be done by observing the occurrence of events through estimation methods, such as the moment estimation, maximum likelihood estimation (MLE), and least square estimation (LSE) [
28]. We assume that the arrival of link opportunities in the LHS set
with the link allocation algorithm also follows a Poisson distribution. The probability mass function (PMF) of the link opportunity occurrence is denoted by
, where
is regarded as the average number of spectrum opportunity. Owing to the fairness fitting function, UAVs share the same Poisson distribution with
, Therefore, we can estimate the number of spectrum opportunities
F in one LHS schemes as:
.
Moreover, we assume that the actions of UAV access to links are independent and follow the Poisson process, where the occurrence of the link opportunities I for all the UAVs satisfies the same Poisson distributions owing to the fairness fitting function. Other time-delay effects, such as carrier sensing time, and link hopping time, are modeled as a fixed processing time .
3.1. Throughput Model
Due to the additional integration of spectrum sensing before transmission mechanism, a successful transmission of data packets considers two aspects: (1) LHS is successfully received by UAVs through the forward links; (2) spectrum detectors equipped on UAVs correctly identify the spectrum occupancy of PU signals.
3.1.1. Packet Dropout
To enable a reasonable estimation of packet dropout probability for UAV communications, Gilbert-Elliott (GE) [
29] is typically applied with a two-state discrete Markov model in modeling wireless A2G aeronautical data links [
30]. Compared with the Bernoulli process model [
31], GE considers the correlation of packet dropout patterns which are caused by failure in receivers and channel conditions (multi-path effect is dominant in UAV applications).
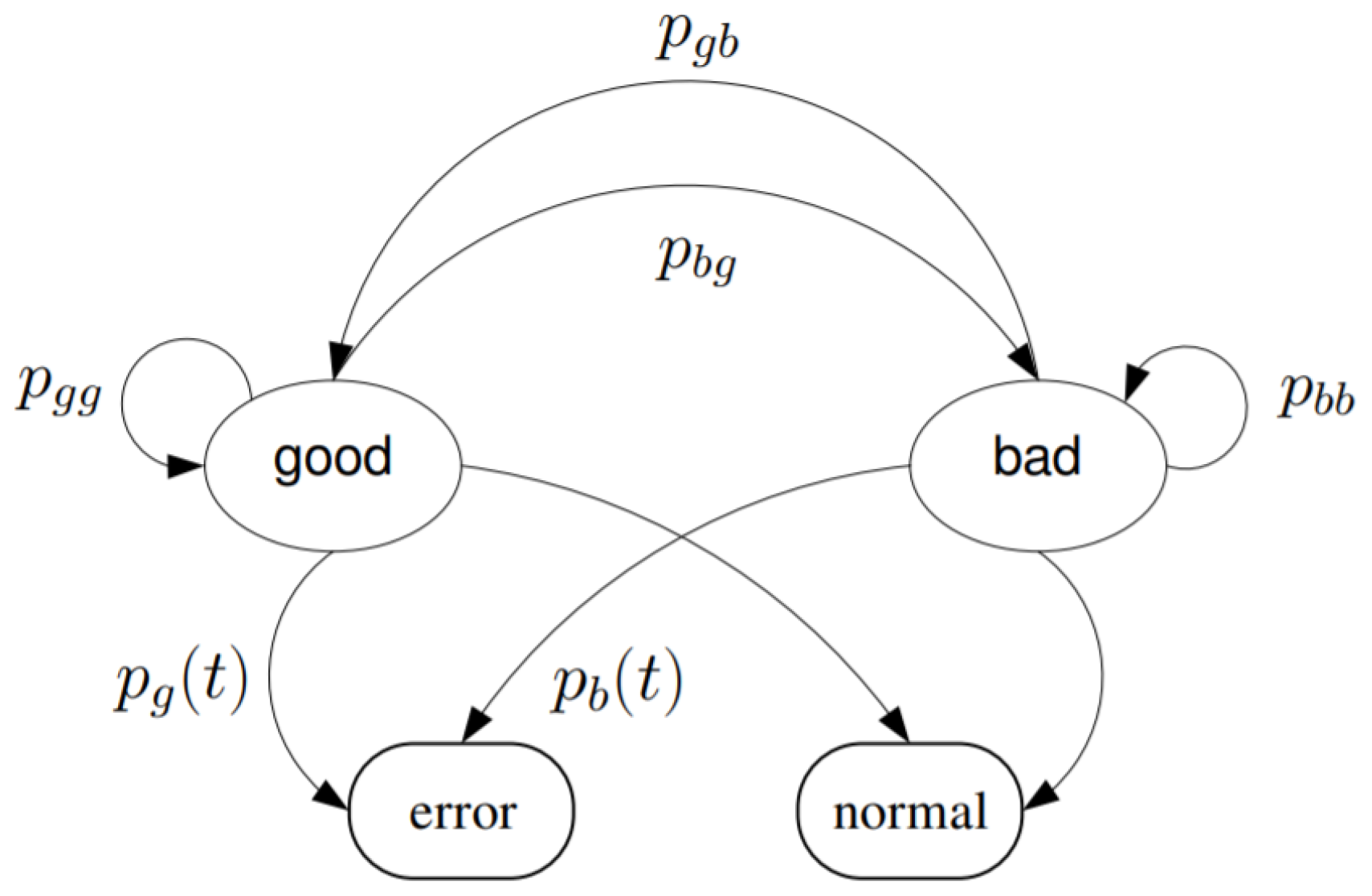
In this work, we use the Markov based GE model presented in [
32] owing to its incorporation of Ricean fading effect and the time-varying nature of the packet dropout. Given two states are modeled, i.e., good (labeled by a subscript of g) and bad (labeled by a subscript of b), the Markov process presented in
Figure 5 is characterized by probabilities, e.g.,
,
,
and
. The
format denotes the probability of the state switching from x to y. Let
and
denote the stationary distributions for the good state and bad state, respectively. The following equations are obtained:
Given the Ricean fading model can be represented by the Rice distribution, the received signal amplitude is characterized with the following two parameters:
where
denotes the proportion of the direct path effect to the scattered path effect.
denotes the received signal power, which is impacted by the distance
d and the path loss via the direct link:
where
denotes the signal power received at the reference distance of
.
is the path loss coefficient and is reasonably configured to 2 in UAV applications (corresponding to the free space model).
With a determined receiver sensitivity
, the probability for the time sensitive error is denoted:
where
Q is the Marcum Q-function.
The estimated packet dropout rate
hence is denoted:
where
and
is the number of observations.
Consequently, the expectation of the opportunity number per each upload is denoted by:
where
represents the number of E-MAVLink frames for one LHS which is estimated by
;
function rounds the element to the nearest value which is greater than itself; and
obtain the remainder after division.
3.1.2. Spectrum Sensing
Due to having the spectrum sensing mechanism before transmission and heterogeneous link types, this section investigates a unified spectrum detection method, i.e., energy detection [
33,
34] for identifying the availability of PUs. The main concept of the energy detection is to summarize the energy of samples over the bandwidth in interest and compare with a threshold.
Given multiple sub-channels may exist, such as IEEE 802.11 [
35], we investigate the fusion of multiple narrow-band spectrum detectors defined as
, where
m is the index of links with the overall
M link number and
n is the index of
N channels. Hence, the detection of the PU signals among narrow-band channels over heterogeneous links can be formulated as
. A binary hypothesis testing model for denoting ON/OFF status of the PU signals is hence developed from [
33]:
where
is the observed samples over the
link and is received by the detector
.
is the sample of PU signals.
is the channel gain between each detector and PUs [
36].
is the noise according to AWGN model.
t is the selected sensing time.
is the event that no signal exists, and
represents the existence of PU signals.
Under a zero-mean circular symmetric complex Gaussian (CSCG) random vector and AWGN noise model [
37], the detection probability
over the single narrow-bandwidth can be developed from [
33]:
where
stands for the signal variance among single channels, and
denotes the threshold for determining the ON or OFF state.
The probability of false alarm
is denoted as:
Given the more concerns on the probability of false alarm than the detection probability, the decision policy employs a constant detection rate (CDR) criterion in this paper. A central chi-square distribution
Q [
33] assumption is applied, and
y assumes to be approximately Gaussian distributed. For a given detection probability
, the threshold value
for the narrow channel
n over link
m can be defined [
33] as:
where
is the standard deviation of noise,
Q is the Gaussian Q-function following the distribution of
, and
represents the sample length induced for the estimation within the
duration.
Given the allowance of multiple
n detectors to make decisions of the link occupancy over
m links and fuse
decisions into one, a k-out-of-N decision fusion rule [
33] which is one typical hard fusion policy in the collaborative sensing is considered by agreeing with the decision when individual detector number reaches
. Consequently, the fused detection probability
and the probability of false alarm
with multiple detectors working on the link
m thus are expressed as [
33]:
where
denotes the detection probability, and
denotes the probability of false alarm.
It is worth noting that with the CDR criteria, the detection probability is determined according to the design requirements. Therefore, the probability of false alarm is one major concern affecting the detector performance.
3.1.3. Saturation Throughput
We refer to the saturation throughput [
38] which is a typical way to measure end-to-end MAC performance. In the saturation throughput analysis, we have a reasonable assumption that users continuously send C2 messages per every
second.
We consider three effects when denoting the saturation throughput model, i.e., the uplink packet loss discussed in
Section 3.1.1, opportunity loss considering the time delay in non-ideal spectrum detector, and miss detection in the sensing phase.
Let
denote the case that UAV detects one link opportunity by mistake. We assume that the re-sensing mechanism follows a binomial distribution. Suppose the Max-N-RS scheme is employed in the E-MAC design discussed in
Section 2.2, the PMF of the
case over the
link opportunity within the re-sensing times
R is denoted as:
where
r is the index of access behaviours.
Given the maximum of R times for the re-sensing, the probability of missing detection of link opportunity for the UAV denotes .
To simply the derivation of throughput, we assume that the links and detectors are homogeneous over the transmission rate and detection probability. Consider the time delay in the sensing phase may result in a smaller number of re-sensing, the possibility that the selected spectrum opportunity has been removed by the E-MAC denotes:
where
.
is the time delay which is modeled by
. The
function denotes rectified linear unit (ReLu) and has the formulation of
.
We apply the order statistic theory [
39] to estimate the possibility. With assumptions that opportunity length
L is independent and identically distributed (i.i.d), we firstly re-order
number of opportunities in the ascending order. Given the exponential distribution of random variables, the expectation of the first
n variable is denoted by
. Therefore, the maximum opportunity number which has longer duration than
denotes
. Given the total received number
, a ReLu function is needed to ensure a positive possibility value.
We define
as the averaged time duration for link opportunities without the time delay effect, as well as
for the link duration with time delays. Therefore, the expectation of
after the E-MAC layer is denoted by:
With the combination of (
8), (
13), (
15), and (
16), the saturation throughput model
with considerations of E-MAC time delay, non-ideal on-board detection and packet dropout is given by:
where
is the theoretical throughput with static connections.
With the acknowledge of
which can be calculated in statistic by the MLE method [
28], another challenge is the estimation of
. We consider two circumstances according to the uncertain relationship between the UAV number
K and the link number
M. When the UAV number
K is bigger than the link number
M, we define such as the spectrum scarce environment. All link opportunities aim to be allocated by the allocation algorithm. Therefore, the allocated opportunity length still follows the exponential distributions, hence
.
When the UAV number
K is smaller than the link number
M, which is defined as the spectrum dense environment, only the top
K opportunities aim to be used during each allocation iterative. Similar with the proof in Equation (
15), we use the statistics theory and the
order statistics formulation is denoted by
[
39]. Therefore, the average opportunity length is denoted as
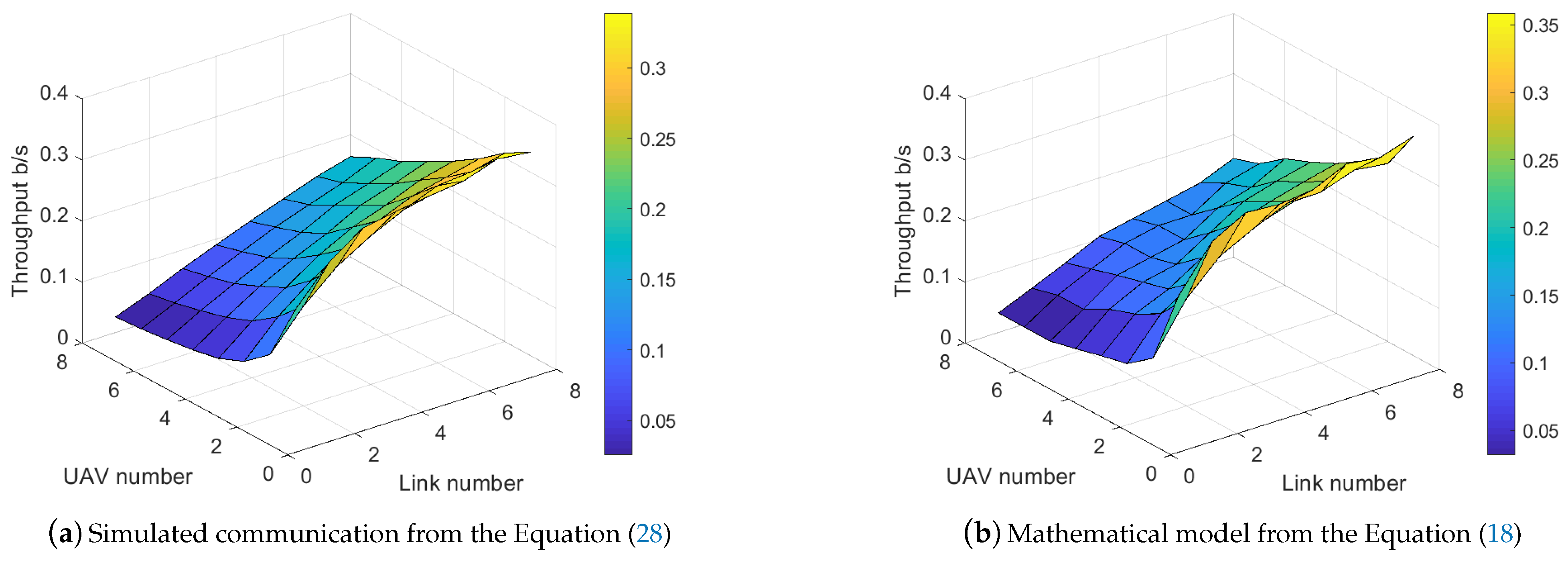
. Consequently, the integrated throughput model per each UAV can be rewritten as a piece-wise function:
where
.
However, by simulations, we find that a leap between two piece-wise equations exists. Meanwhile, each iterative may not always allocate top
K resources at each time especially when
. Therefore, we fine-tune this model with an empirical equation by introducing a more accurate factor between spectrum resources and the user number. The fine-tuned throughput model is denoted by:
where
and
are the coefficient weights for the adjustment purpose.
which means that when spectrum resources are in relevantly scarcity (
is large), the throughput tends to move closer to the case of
with a shorter opportunity duration. Reversely, under the spectrum dense environment, the opportunity duration increases.
Considering the fact that the re-sensing number in the E-MAC layer is always bigger than one. Therefore, the following function is needed when estimating the re-sensing effect on the E-MAC:
Similarly, in the Equation (
18), the transmission number
in the forward link should be substituted with the following function to guarantee that at least one transmission via the forward link is performed:
3.2. Interference Measurement
Regarding the fact that non-ideal spectrum detectors could generate interference to existing PU users, this section discusses one measurement model
from [
10] for revealing the interference extent. Two interference cases are considered, i.e., the missed detection of PU signal may generate collisions towards existing PU activities, and the burst occurrence of PU signal may be disturbed during the UAV transmission.
First, we assume that the unknown PU communication system employs a one-unit system [
27], which means that one disruption in the transmission would lead to the failure of the whole system. We use hypothesis of
and
to denote the inactive and active states of PU models [
10], and the PU occurrence model is denoted:
where
denotes the length of sensing duration.
Providing the maximum
R time of the re-sensing and
F number of link opportunities in one LHS sagement, the measurement of the first case, i.e., the missed detection leading to the interference is formulated by combining (
11) with (
22):
.
For measuring the the second interference case, we define as the probability that PU awakes during the UAV transmission after satisfying the assumption. Hence, the is denoted: . The interference factor for the second case is thus given as: .
Consequently, the integrated interference factor
which denotes the transmission collision degree over PUs is formulated:
where
is discussed in the
Section 3.1.3.
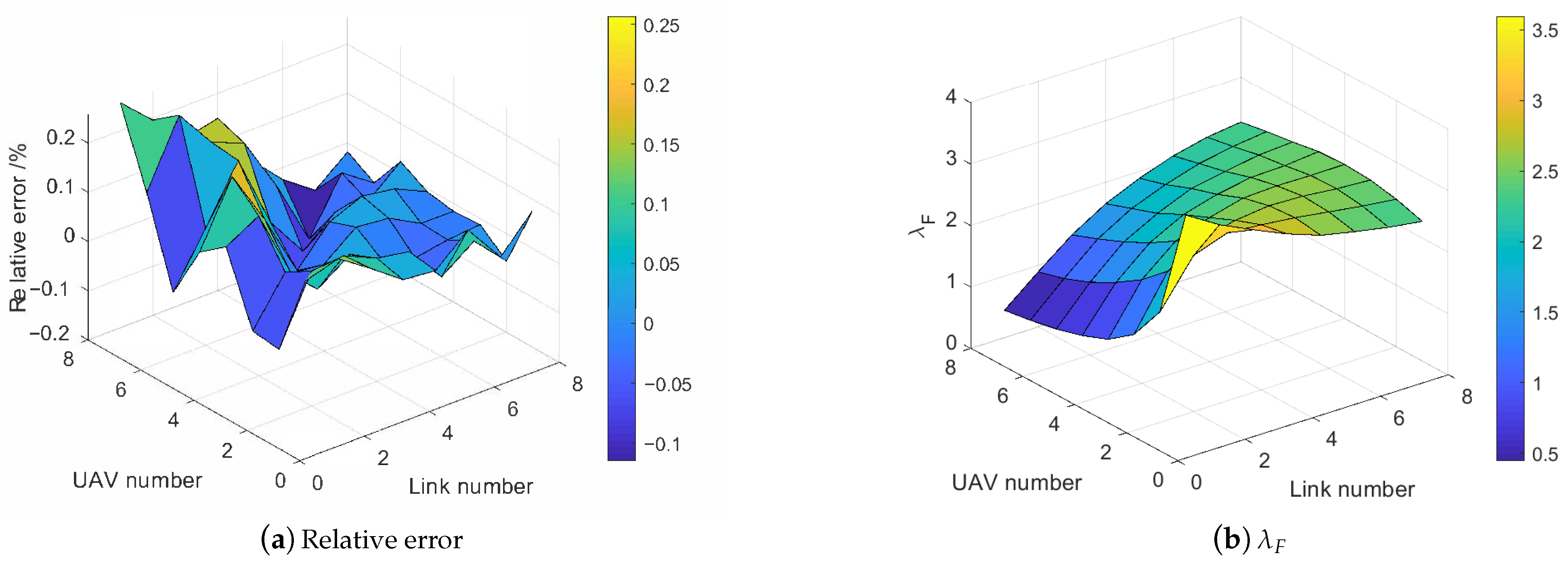
From the Equation (
23), it is noting that with the increment of the
value,
and the component of
in the
increase monotonically, and those factors relate to the performance of the airborne spectrum detector. However, the
in the
is non-monotonic because of the uncertain relation between
and
. Moreover, several parameters also present effects on the weights for separate components, which drive the needs for further analysis by simulations.
3.3. Analysis
We regard the typical static communication scheme as the benchmark, meaning that the dynamic hopping is not enabled, and SUs transmission is paused until PUs are in vacant. Therefore, the capacity of the static communication system is:
where
is the maximum user number for
link.
Facilitated by the coordination of individual link opportunities, the capacity for the RA-OLS communication can be maximized by allocating one opportunity to one UAV (no minimum throughput requirements):
where
denotes to have
opportunity number for the
link.
We also have the definition of the utilization rate
discussed in the
Section 2.3, hence the best
U averaged with
K UAVs for the static scheme solution is estimated by:
where the negative effects, such as the packet dropout, non-ideal detection and delay in E-MAC, are not included.
For the RA-OLS scheme, the achievable utilization rate is obtained from the Equation (
18):
As presented in the throughput Equation (
18), the throughput decreases monotonically with the increment of
because the forward link model is not considered and more forward packages (longer E-MAVLink and more E-MAVLink frames) are delivered to UAVs leading to the bigger failure in the packet dropout.
Moreover, we group other parameters from the throughput Equation (
18) into four categories, i.e., the PU pattern representatives denoted by
M,
K,
and
, the non-ideal detector denoted by
,
,
,
and
, the time delay in E-MAC denoted by
,
and
R, and the E-MAVLink length denoted by
. With the determined
values, the optimization of the throughput function for parameters can be done numerically. With the consideration of the
function (
23), the trade-off between throughput and interference effect might be challenging, especially with uncertain
. The examination of the time delay effect on the E-MAC processing can be done by differing
only with the fixed
. Considering the difficulty in having
models, the throughput performance affected by parameters needs to be analyzed, as well as the
result.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}