
Position Estimation of Vehicle Based on Magnetic Marker: Time-Division Position Correction


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- First, to improve the vehicle-speed-related magnetic signal processing problem, a signal processor is implemented to process magnetic signal detection at a fast cycle (1 ms), separate from the low vehicle control cycle (50 ms);
- A position correction method is proposed to reduce the loss of correction values and improve the position discontinuity that results from correcting errors. A time-division error correction method based on the moving distance is proposed for the errors measured when the magnetic markers are detected.
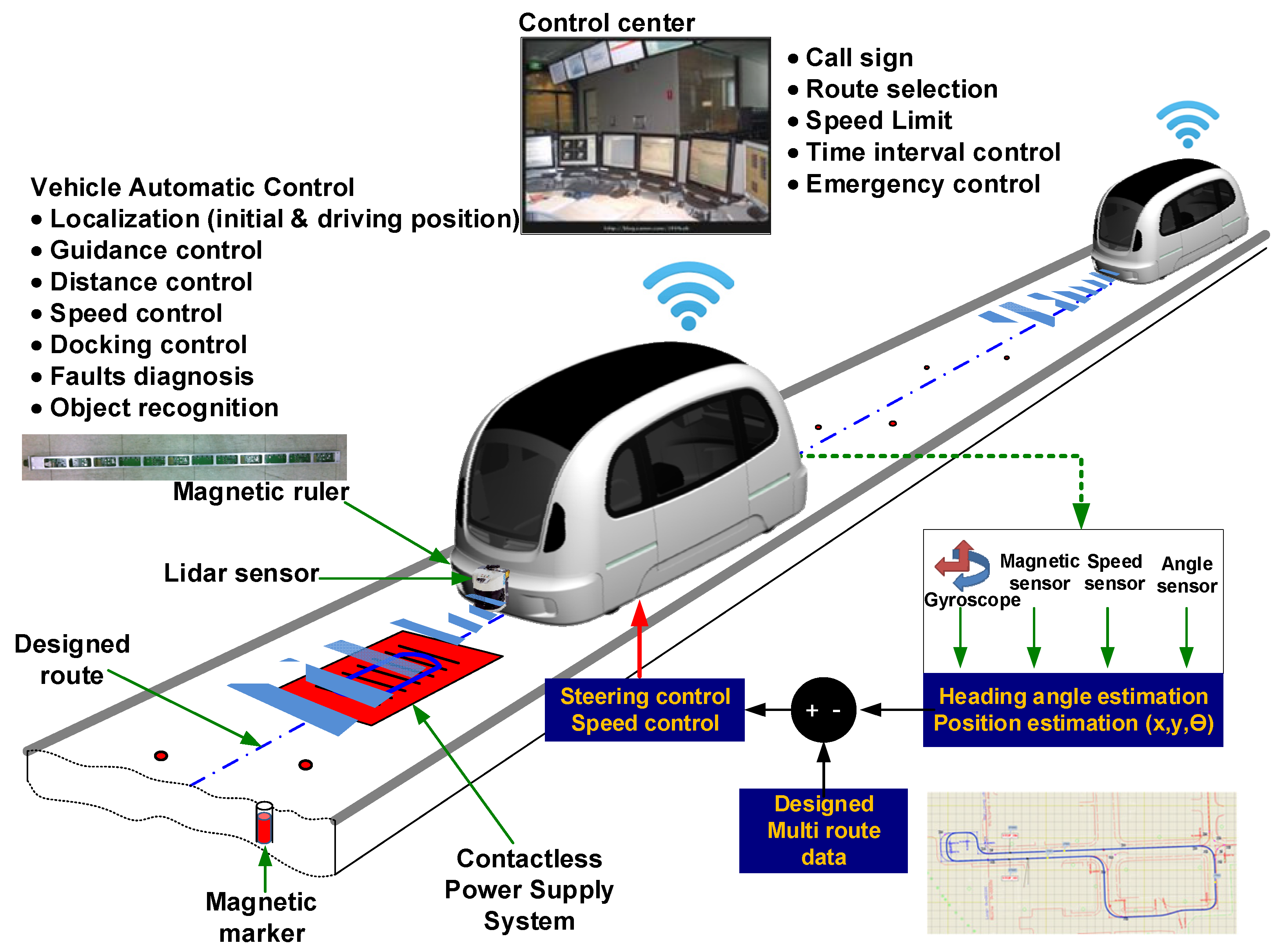
2. Magnetic-Marker-Based Guidance System
Magnet Measurement System
Configuration of the Magnetic Sensing Rules
3. Magnetic Marker Detection and Signal Processing
3.1. Magnetic Marker Position Detection
3.1.1. Resampling
3.1.2. Estimation of the Center Point of the Magnetic Field Signal in the Collected 2D Data Space
- The position of the maximum [x_max, y_max] is found in the collected 2D data;
- The top, bottom, left, and right data spaces of a certain size around the position of the maximum are extracted;
- The sum of each row and the sum of each column in the extracted sample space are calculated;
- Because only the peak of the signal needs to be determined, the signal is assumed to have a parabolic shape with the maximum point to simplify and reduce the computational process. Then, it is modeled using a quadratic function and the least square method is applied to find the coefficient of the quadratic function. As can be seen in Figure 5, while the overall shape of the acquired magnetic signal has a Gaussian form, it has a quadratic form near the peak. In order to minimize the amount of signal processing data, only a part including the maximum point of the signal is extracted and processed. In addition, since only the x-axis position information with the maximum point of the signal needs to be obtained, the calculation process is simplified by a quadratic function. The validity of this method is confirmed through an actual driving test;
- To find the maximum point, the position value of a point with a slope of 0 is found by applying the differential of the quadratic function.
3.1.3. Estimation of the Position of the Center of the Magnetic Marker (Center of the Magnetic Field Signal) in the Coordinates of the Magnetic Sensing Ruler (Lx, Ly)
4. Localization Based on Magnetic Marker
4.1. Position Error Based on the Detected Magnetic Marker
4.2. Time-Division Position Correction
4.2.1. Determination of the Number of Divisions
4.2.2. Position Correction
5. Results and Discussion
6. Conclusions
- The speed of sensor utilization was improved through separate processing of the vehicle control cycle and magnet signal detection cycle;
- The continuity of position information was improved using the time-division position correction method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rogers, R. Land vehicle navigation filtering for GPS/dead-reckoning system. In Proceedings of the Institute of Navigation National Technical Meeting, Santa Monica, CA, USA, 14–16 January 1997; pp. 703–708. [Google Scholar]
- Farrell, J.; Barth, M.; Galijan, R.; Sinko, J. GPS/INS based lateral and longitudinal control demonstration: Final report. In California PATH Research Report; UC Berkeley: Berkeley, CA, USA, 1998. [Google Scholar]
- Bonnifait, P.; Bouron, P.; Crubille, P.; Meizel, D. Data fusion of four ABS sensors and GPS for an enhanced localization of car-like vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; pp. 1597–1602. [Google Scholar]
- Farrell, J.; Tan, H.-S.; Yang, Y. Carrier phase GPS-aided INS based vehicle lateral control. ASME J. Dyn. Syst. Meas. Control. 2003, 25, 339–353. [Google Scholar] [CrossRef]
- Jo, K.; Chu, K.; Sunwoo, M. Interacting multiple model filter-based sensor fusion of GPS with in-vehicle sensors for real-time vehicle positioning. IEEE Trans. Intell. Trans. Syst. 2012, 13, 329–343. [Google Scholar] [CrossRef]
- Lee, B.-H.; Song, J.-H.; Im, J.-H.; Im, S.-H.; Heo, M.-B.; Jee, G.-I. GPS/DR error estimation for autonomous vehicle localization. Sensors 2015, 15, 20779–20798. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abbott, E.; Powell, D. Land-vehicle navigation using GPS. Proc. IEEE 1999, 87, 145–162. [Google Scholar] [CrossRef] [Green Version]
- Broggi, A.; Bertozzi, M.; Fascioli, A.; Bianco, C.; Piazzi, A. The ARGO autonomous vehicle’s vision and control systems. Int. J. Intell. Control Syst. 1999, 3, 409–441. [Google Scholar]
- Se, S.; Lowe, D.; Little, J. Vision-based mobile robot localization and mapping using scale-invariant features. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seoul, Korea, 9 July 2001; pp. 2051–2058. [Google Scholar]
- Alonso, I.P.; Llorca, D.; Gavilan, M.; Pardo, S.; Garcia-Garrido, M.; Vlacic, L.; Sotelo, M. Accurate global localization using visual odometry and digital maps on urban environments. IEEE Trans. Intell. Trans. Syst. 2012, 13, 1535–1545. [Google Scholar] [CrossRef] [Green Version]
- Droeschel, D.; Behnke, S. Efficient Continuous-Time SLAM for 3D Lidar-Based Online Mapping. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; pp. 5000–5007. [Google Scholar]
- Behley, J.; Stachniss, C. Efficient surfel-based SLAM using 3D laser range data in urban environments. In Robotics; Science and Systems: Pittsburgh, PA, USA, 2018. [Google Scholar]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and ground-optimized LiDAR odometry and mapping on variable terrain. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Lu, W.; Zhou, Y.; Wan, G.; Hou, S.; Song, S. L3-net: Towards Learning Based LiDAR Localization for Autonomous Driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 6382–6391. [Google Scholar]
- Bento, L.; Nunes, U. Autonomous navigation control with magnetic markers guidance of a cybernetic car using fuzzy logic. Mach. Intell. Robot. Control. 2003, 4, 3–12. [Google Scholar]
- Barata, M.; Nunes, U.; Bento, L.C.; Mendes, A. Data fusion of wheel encoders and magnetic sensors for autonomous vehicles navigation. In Proceedings of the 6th Portuguese Conference on Automatic Control (CONTROLO 2004), Faro, Portugal, 7–9 June 2004; pp. 31–37. [Google Scholar]
- Surrécio, A.; Nunes, U.; Araújo, R. Fusion of odometry with magnetic sensors using Kalman filters and augmented system models for mobile robot navigation. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE2005), Dubrovnik, Croatia, 20–23 June 2005. [Google Scholar]
- Xu, H.G.; Wang, C.X.; Yang, R.Q.; Yang, M. Extended Kalman filter based magnetic guidance for intelligent vehicles. In Proceedings of the Intelligent Vehicles Symposium, Tokyo, Japan, 11 September 2006; pp. 169–175. [Google Scholar]
- Lopes, A.C.; Moita, F.; Nunes, U.; Solea, R. An outdoor guidepath navigation system for AMRs based on robust detection of magnetic markers. In Proceedings of the 12th IEEE Conference on Emerging Technologies and Factory Automation (ETFA2007), Patras, Greece, 25–28 September 2007. [Google Scholar]
- Bourny, V.; Capitaine, T.; Barrandon, L.; Gard, C.; Lorthois, A. A localization system based on buried magnets and dead reckoning for mobile robots. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 373–378. [Google Scholar]
- Byun, Y.S.; Jeong, R.G.; Kang, S.W. Vehicle position estimation based on magnetic markers: Enhanced accuracy by compensation of time delays. Sensors 2015, 15, 28807–28825. [Google Scholar] [CrossRef] [PubMed]
- Byun, Y.S.; Kim, Y.C. Heading angle estimation based on magnetic markers for intelligent vehicles. ASME J. Dyn. Syst. Meas. Control. 2016, 138, 71009. [Google Scholar] [CrossRef]
- MASDAR PRT. Available online: http://www.2getthere.eu/projects/masdar-prt (accessed on 4 October 2016).
- Farrell, J.; Barth, M. Integration of GPS/INS and magnetic markers for advanced vehicle Control. In California PATH Research Report; UC Berkeley: Berkeley, CA, USA, 2001. [Google Scholar]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Byun, Y.S.; Jeong, R.G. Position Estimation of Vehicle Based on Magnetic Marker: Time-Division Position Correction. Sensors 2021, 21, 8274. https://doi.org/10.3390/s21248274
Byun YS, Jeong RG. Position Estimation of Vehicle Based on Magnetic Marker: Time-Division Position Correction. Sensors. 2021; 21(24):8274. https://doi.org/10.3390/s21248274
Chicago/Turabian StyleByun, Yeun Sub, and Rag Gyo Jeong. 2021. "Position Estimation of Vehicle Based on Magnetic Marker: Time-Division Position Correction" Sensors 21, no. 24: 8274. https://doi.org/10.3390/s21248274
APA StyleByun, Y. S., & Jeong, R. G. (2021). Position Estimation of Vehicle Based on Magnetic Marker: Time-Division Position Correction. Sensors, 21(24), 8274. https://doi.org/10.3390/s21248274