
A Novel Pix2Pix Enabled Traveling Wave-Based Fault Location Method

Abstract
:1. Introduction
2. Principles
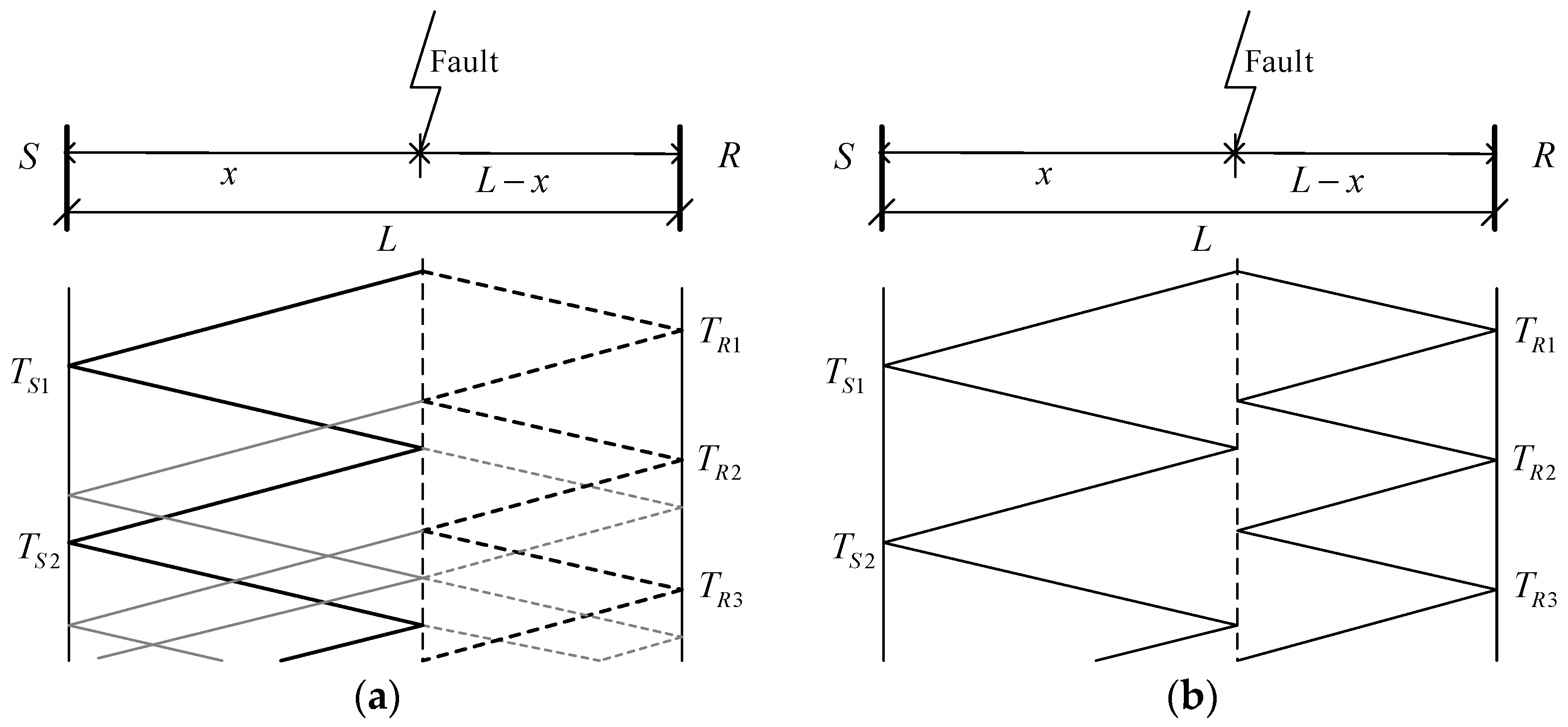
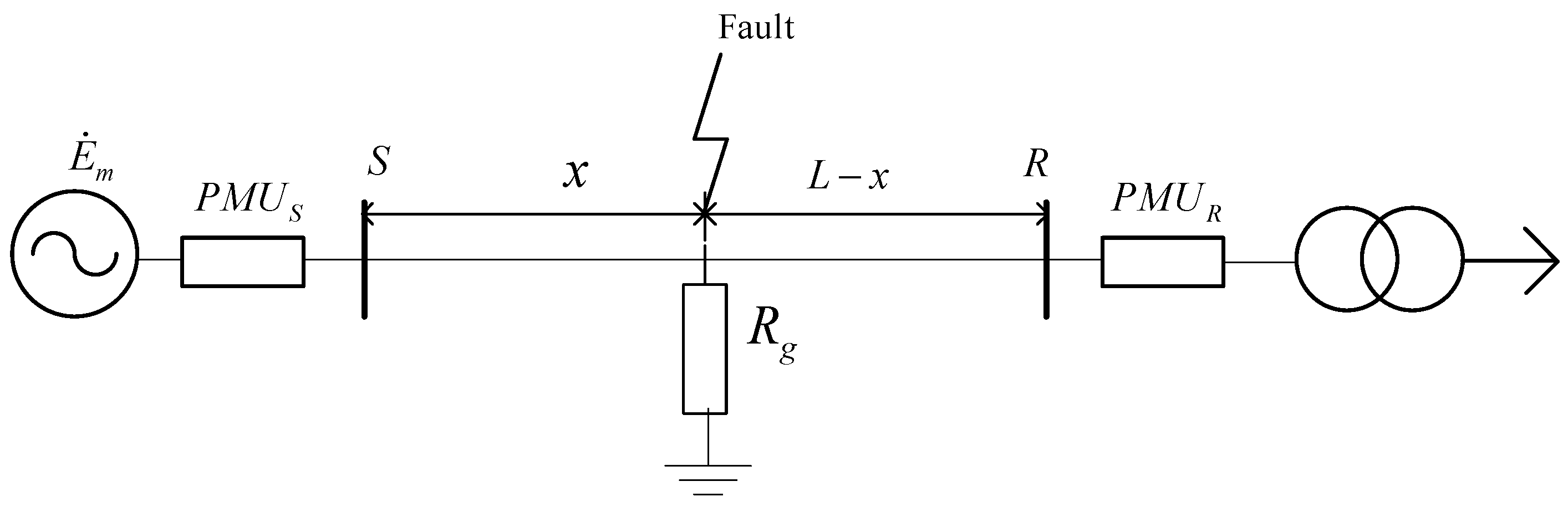
2.1. Traveling Wave-Based Fault Location Method
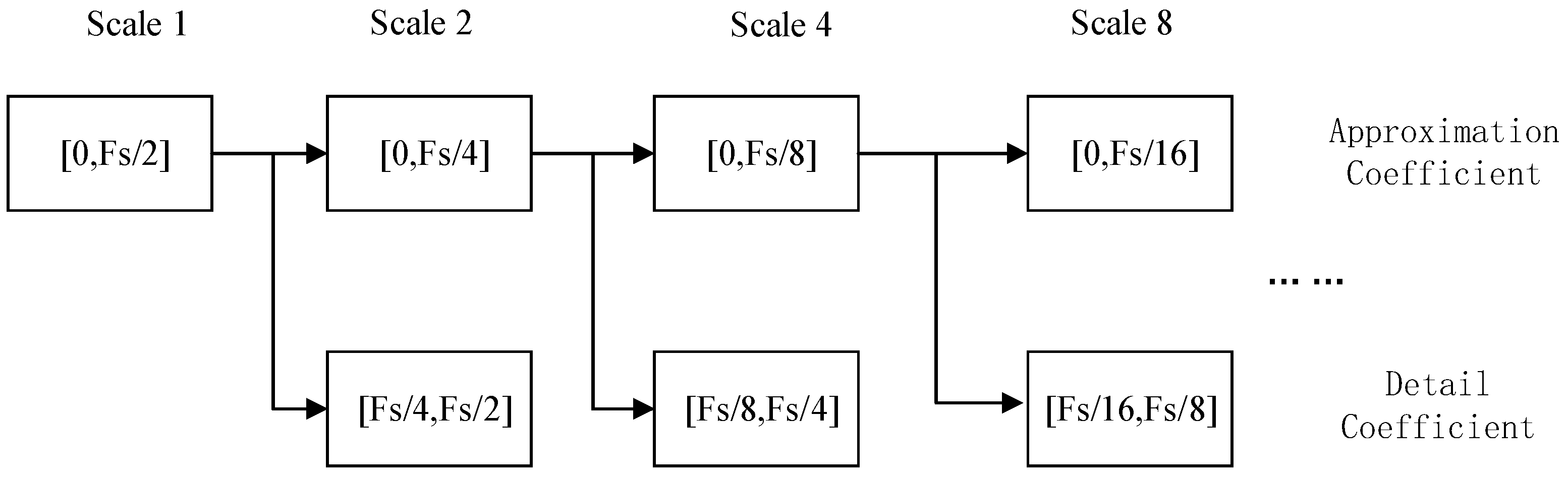
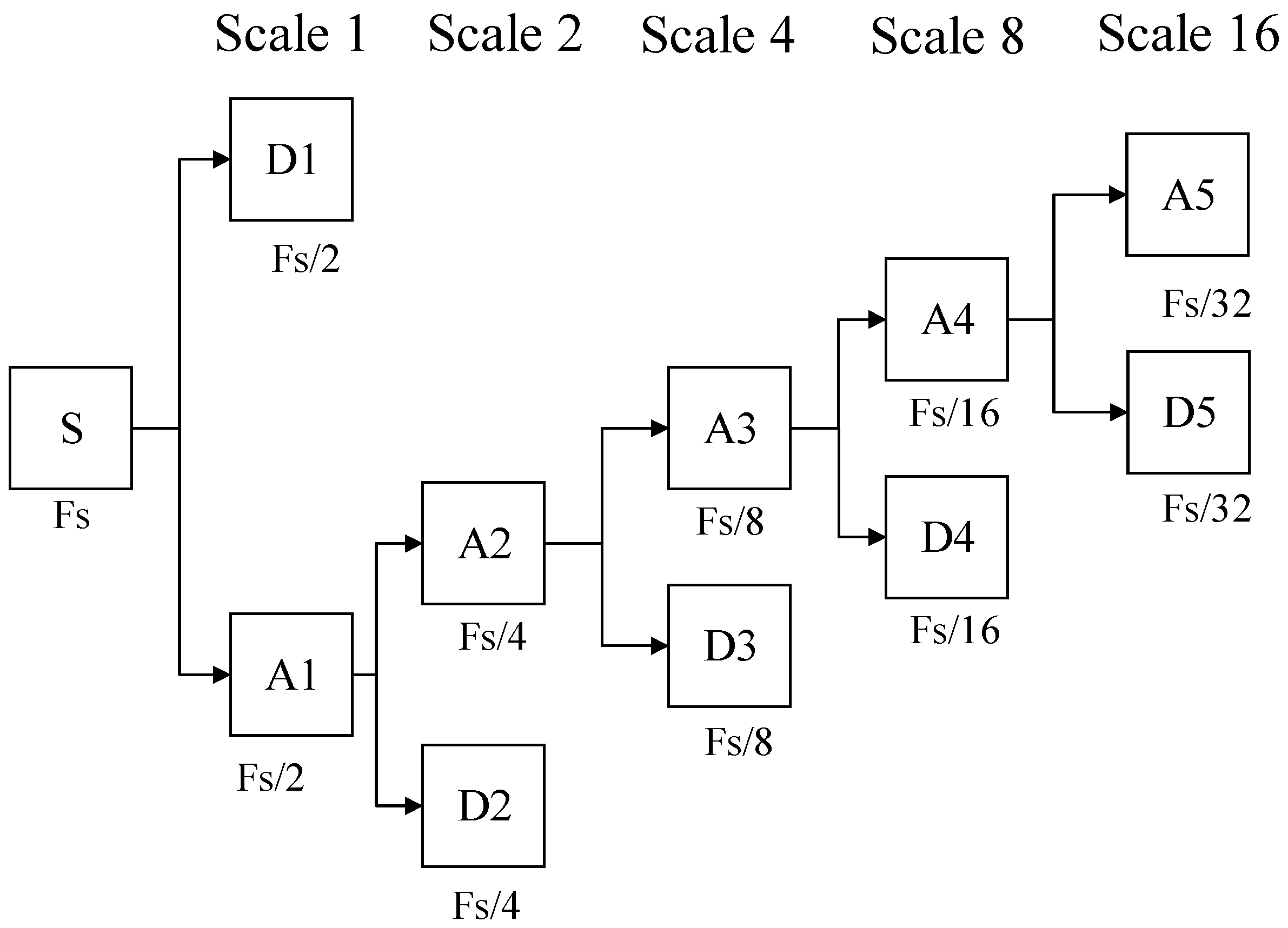
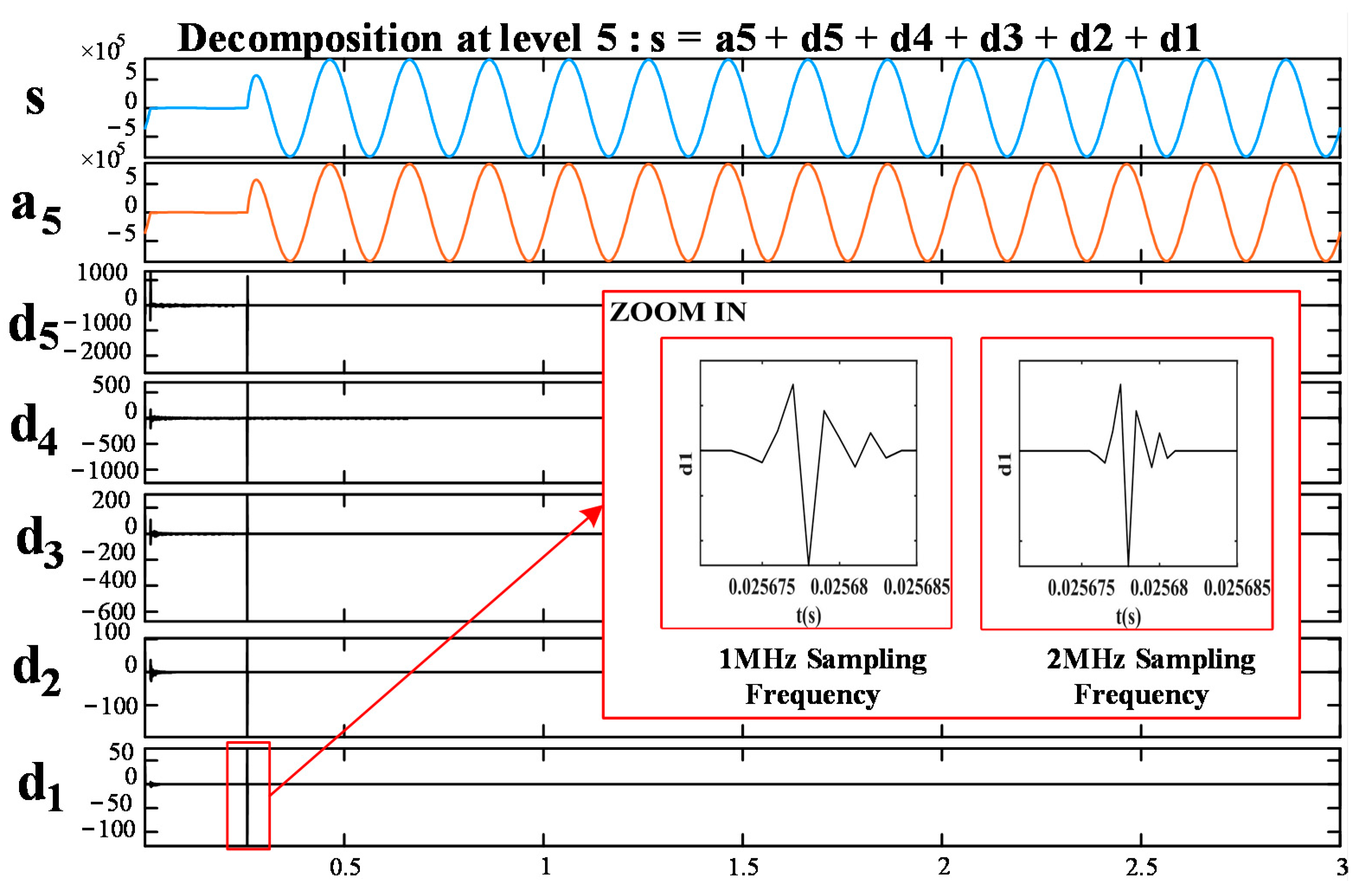
2.2. Wavelet Transform
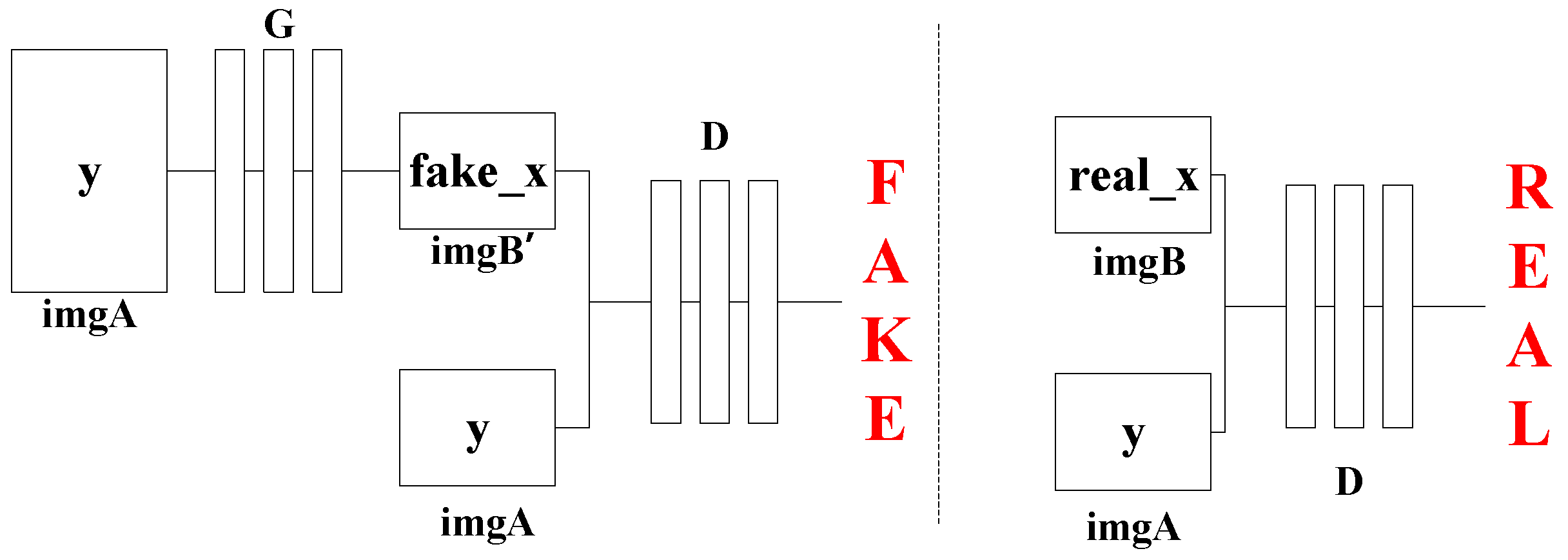
2.3. Pix2Pix
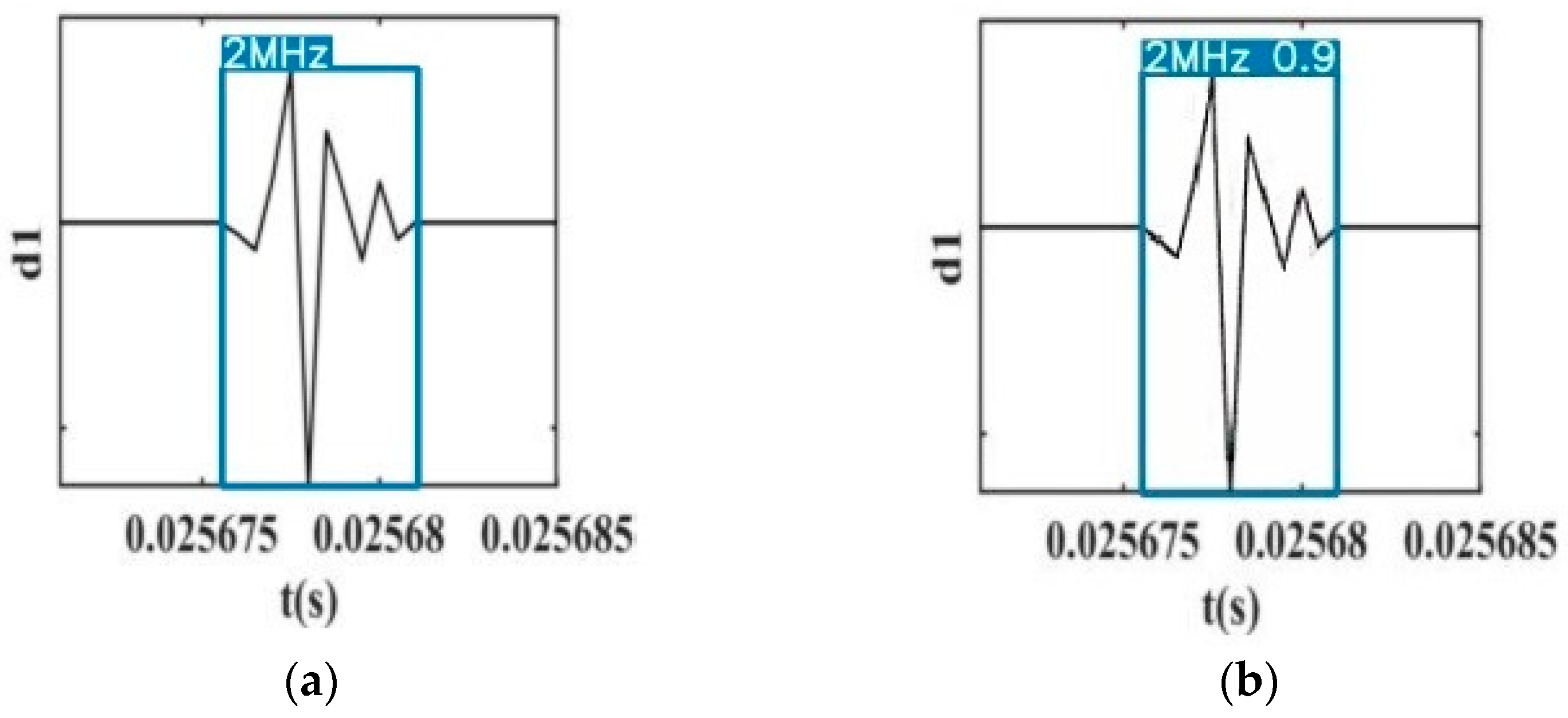
2.4. YOLO v3
3. Accuracy Improvement Method
3.1. Dataset Generation
3.2. Pix2Pix Training
3.3. Evaluation Metrics
3.4. Accuracy Improvement Effect Evaluation
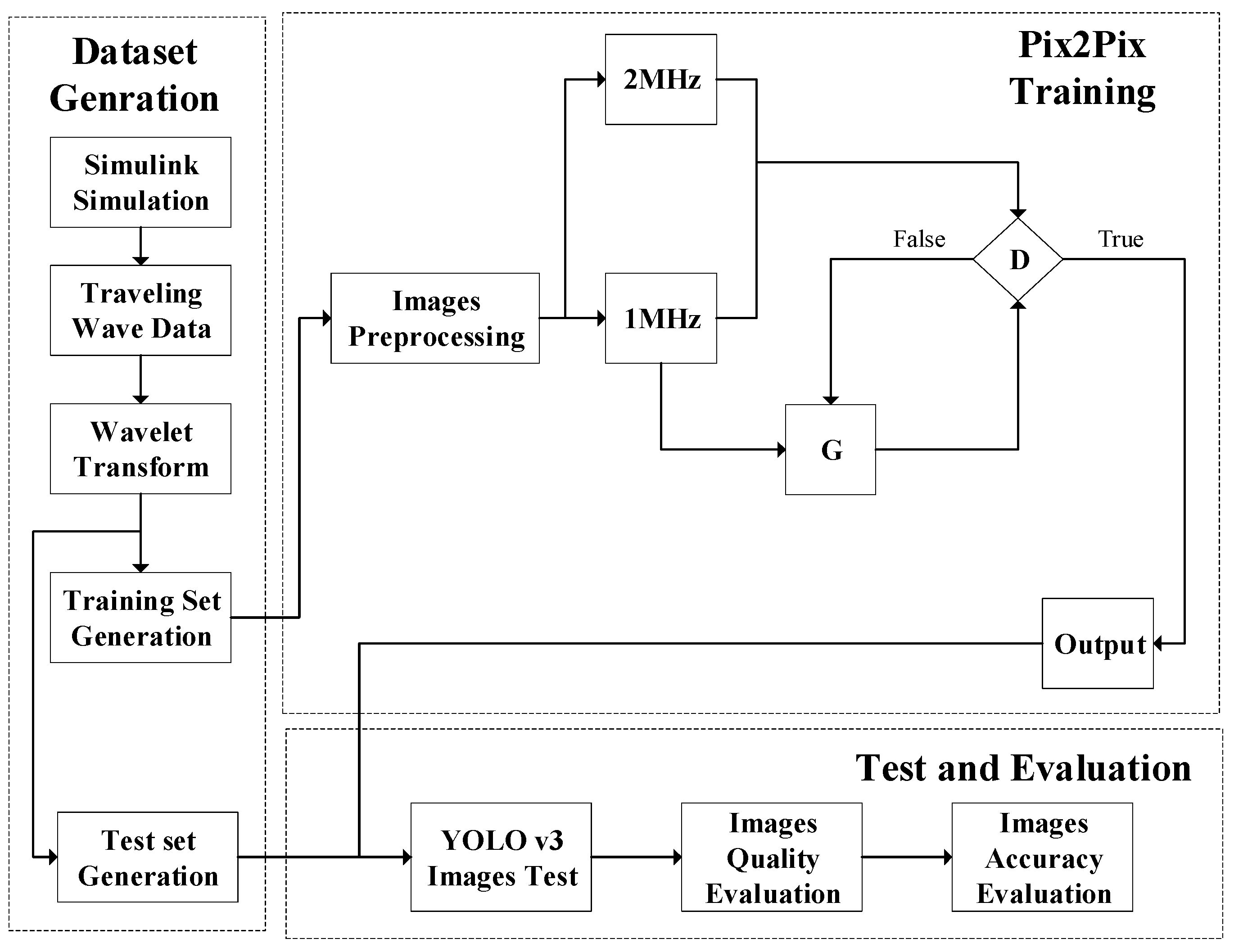
3.5. Flowchart of Accuracy Improvement Method
4. Analysis of Results
4.1. Simulation Results
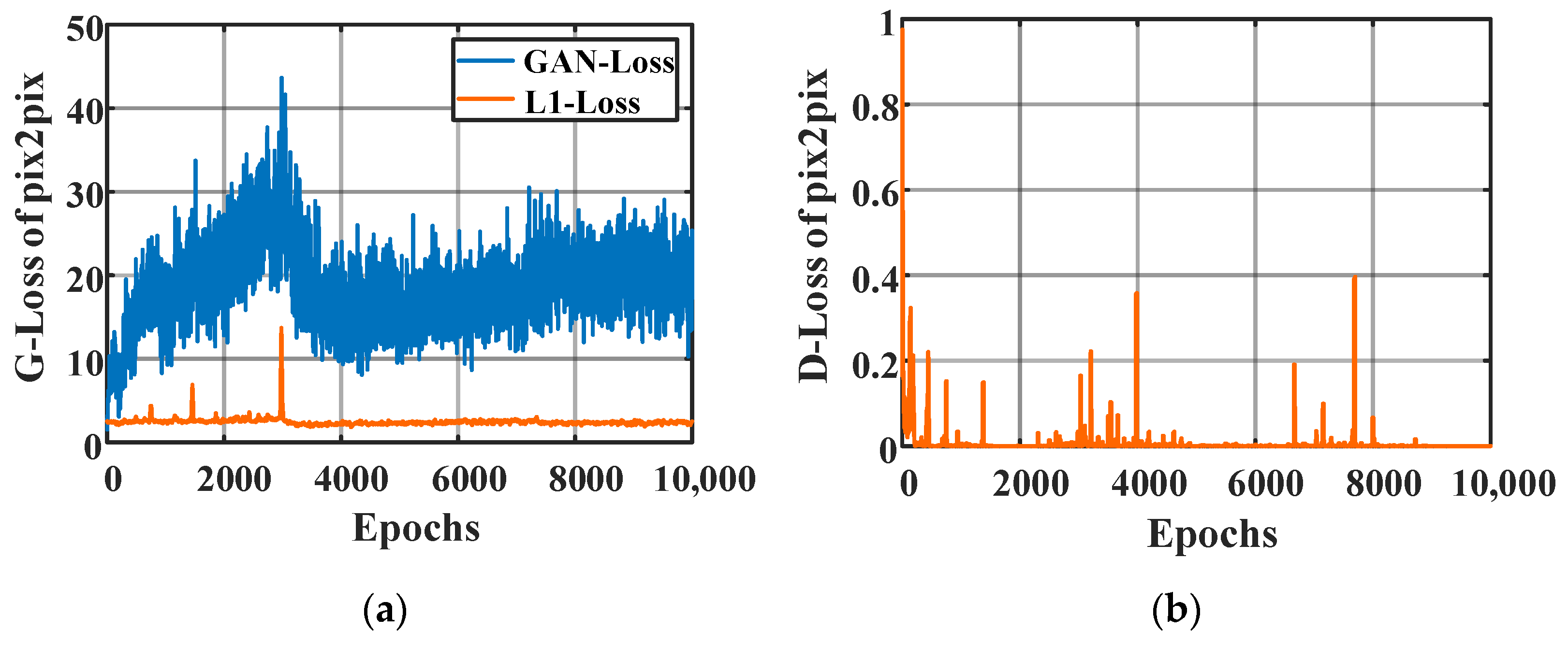
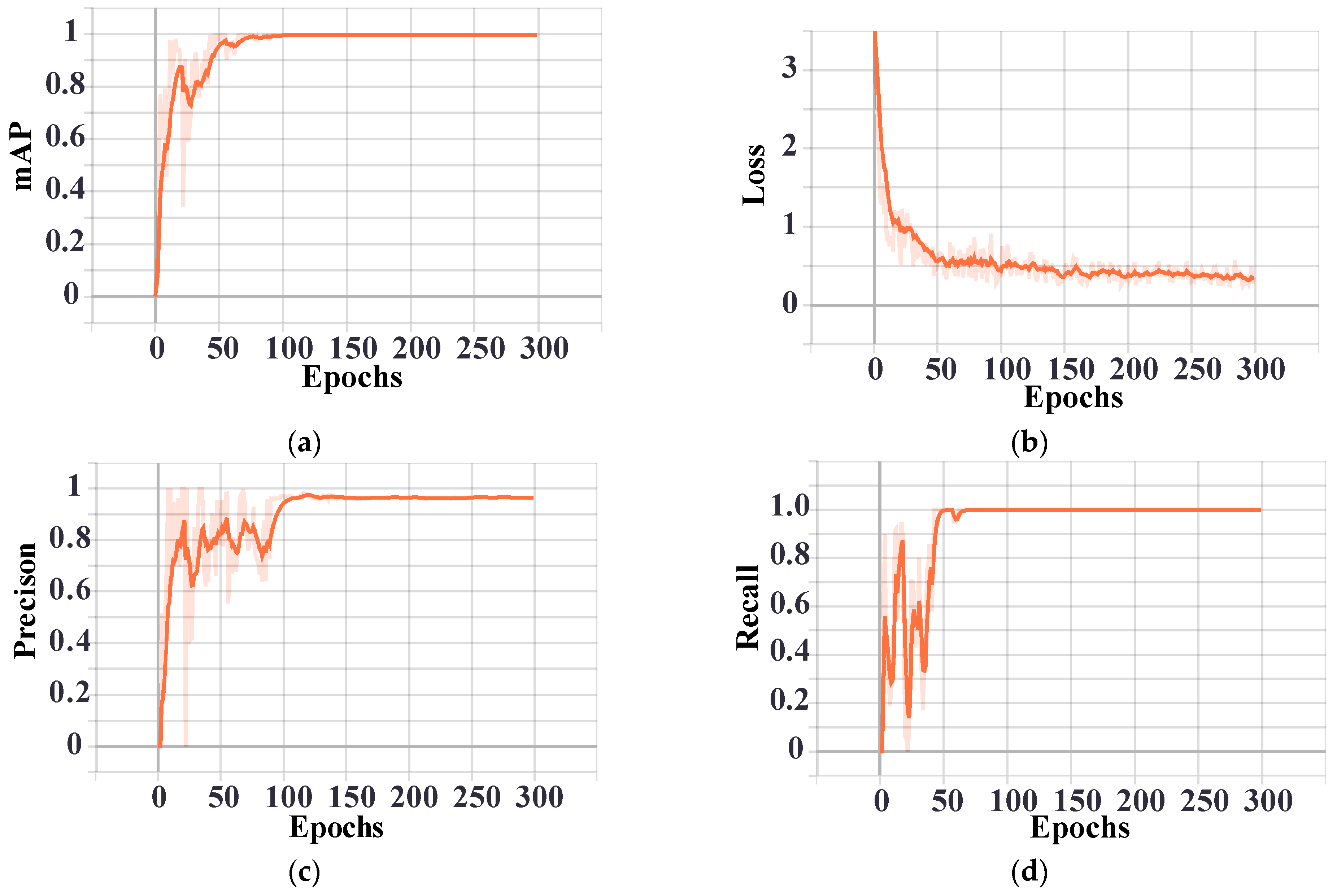
4.2. Pix2Pix Training Result
4.3. Image Quality Evaluation
4.4. Result of Accuracy Improvement
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Phadke, A.G.; Thorp, J.S.; Adamiak, M.G. A New Measurement Technique for Tracking Voltage Phasors, Local System Frequency, and Rate of Change of Frequency. IEEE Power Eng. Rev. 1983, PER-3, 23. [Google Scholar] [CrossRef]
- Wang, M.; Chow, J.H.; Gao, P.; Jiang, X.T.; Xia, Y.; Ghiocel, S.G.; Fardanesh, B.; Stefopolous, G.; Kokai, Y.; Saito, N.; et al. A Low-Rank Matrix Approach for the Analysis of Large Amounts of Power System Synchrophasor Data. In Proceedings of the 2015 48th Hawaii International Conference on System Sciences, Kauai, HI, USA, 5–8 January 2015; pp. 2637–2644. [Google Scholar]
- Dagle, J. Currrent PMU Locations—Map of Networked PMUs. 2013. Available online: https://www.naspi.org/documents (accessed on 12 January 2021).
- Yu, L.; Jiao, Z.; Wang, X.; Chen, W.; Deng, F. Accurate Fault Location Scheme and Key Technology of Medium-voltage Distribution Network with Synchrophasor Measurement Units. Autom. Electr. Power Syst. 2020, 44, 30–38. [Google Scholar]
- Deng, F.; Li, P.; Zeng, X.; Yu, L.; Mao, Y. Fault Line Selection and Location Method Based on Synchrophasor Measurement Unit for Distribution Network. Autom. Electr. Power Syst. 2020, 44, 160–167. [Google Scholar]
- Liao, Y. Generalized Fault-Location Methods for Overhead Electric Distribution Systems. IEEE Trans. Power Deliv. 2010, 26, 53–64. [Google Scholar] [CrossRef]
- Shi, S.; Lei, A.; He, X.; Mirsaeidi, S.; Dong, X. Travelling waves-based fault location scheme for feeders in power distribution net-work. J. Eng. 2018, 2018, 1326–1329. [Google Scholar] [CrossRef]
- Choi, M.-S.; Lee, S.-J.; Lee, D.-S.; Jin, B.-G. A new fault location algorithm using direct circuit analysis for distri-bution systems. IEEE Trans. Power Deliv. 2004, 19, 35–41. [Google Scholar] [CrossRef]
- Krishnathevar, R.; Ngu, E.E. Generalized Impedance-Based Fault Location for Distribution Systems. IEEE Trans. Power Deliv. 2012, 27, 449–451. [Google Scholar] [CrossRef]
- He, J.-N.; Chen, J.-Y.; Ai, Y.-M.; Lin, P.; Feng, Q.-S. Fault location methods based on traveling wave theory for power system and its development. Power Syst. Prot. Control 2014, 42, 148–154. [Google Scholar]
- Lewis, L.J. Traveling Wave Relations Applicable to Power-System Fault Locators. Trans. Am. Inst. Electr. Eng. 1951, 70, 1671–1680. [Google Scholar] [CrossRef]
- Aurangzeb, M.; Crossley, P.A.; Gale, P. Fault location using the high frequency travelling waves measured at a single location on a transmission line. In Proceedings of the 2001 Seventh International Conference on Developments in Power System Protection (IEE), Amsterdam, The Netherlands, 9–12 April 2001; pp. 403–406. [Google Scholar]
- Hamidi, R.J.; Livani, H. Traveling-Wave-Based Fault-Location Algorithm for Hybrid Multiterminal Circuits. IEEE Trans. Power Deliv. 2017, 32, 135–144. [Google Scholar] [CrossRef]
- Li, W.; Deka, D.; Chertkov, M.; Wang, M. Real-Time Faulted Line Localization and PMU Placement in Power Systems through Convolutional Neural Networks. IEEE Trans. Power Syst. 2019, 34, 4640–4651. [Google Scholar] [CrossRef] [Green Version]
- Cai, B.; Liu, Y.; Xie, M. A Dynamic-Bayesian-Network-Based Fault Diagnosis Methodology Considering Transient and Intermittent Faults. IEEE Trans. Autom. Sci. Eng. 2016, 14, 276–285. [Google Scholar] [CrossRef]
- Cai, B.; Liu, H.; Xie, M. A real-time fault diagnosis methodology of complex systems using object-oriented Bayesian networks. Mech. Syst. Signal Process. 2016, 80, 31–44. [Google Scholar] [CrossRef]
- Zheng, C.; Kong, X.; Guan, J.; Tan, J.; Lu, K.; Wang, W.; You, J.; Lin, G.; Zhang, Z. Traveling Wave Head Detection Algorithm Based on Wavelet Multi-scale Information Fusion. Smart Power 2019, 47, 97–102. [Google Scholar]
- Chen, K.; Hu, J.; Zhang, Y.; Yu, Z.; He, J. Fault Location in Power Distribution Systems via Deep Graph Convolutional Networks. IEEE J. Sel. Areas Commun. 2019, 38, 119–131. [Google Scholar] [CrossRef] [Green Version]
- Hao, S.; Ma, R.; Zhao, X.; An, B.; Zhang, X.; Ma, X. Fault Detection Method of YOLOv3 Transmission Line Based on Convolutional Block Attention Model. Power Syst. Technol. 2020, 2021, 1–10. Available online: http://kns.cnki.net/kcms/detail/11.2410.TM.20201202.1229.002.html (accessed on 2 December 2020).
- Li, L.; Chen, X.; Zhou, H.; Wang, L. Recognition and Application of Infrared Thermal Image among Power Facilities Based on YOLO. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 5939–5943. [Google Scholar]
- Zhang, H.; Li, J.; Zhang, B. Foreign Object Detection on Insulators Based on Improved YOLO v3. Electr. Power 2020, 53, 49–55. [Google Scholar]
- Li, G.; Sun, Z.; Zhang, Y. ISAR Target Recognition Using Pix2pix Network Derived from cGAN. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 1–4. [Google Scholar]
- Ian, J.G.; Jean, P.-A.; Mehdi, M.; Xu, B.; David, W.-F.; Sherjil, O.; Aaron, C.; Yoshua, B. Generative adversarial nets. arXiv 2014, arXiv:1406.2661. [Google Scholar]
- Lee, E.-H.; Jeon, M.; Jang, H.; Park, B.; Kim, A.; Lee, S. Study on the Training Effectiveness of Deep Learning with Synthesized Un-derwater Sonar Image Using Pix2Pix and FCN. In Proceedings of the 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), St Johns, NL, Canada, 30 September–2 October 2020; pp. 1–3. [Google Scholar]
- Dommel, H.W.; Michels, J.M. High Speed Relaying Using Traveling Wave Transient Analysis. IEEE Trans. Power Apparatus Syst. 1978, 97, 1–7. [Google Scholar]
- Crossley, P.A.; McLaren, P.G. Distance Protection Based on Traveling Waves. IEEE Power Eng. Rev. 1983, 3, 30–31. [Google Scholar] [CrossRef]
- Magnago, F.H.; Abur, A. Fault location using wavelets. IEEE Trans. Power Deliv. 1998, 13, 1475–1480. [Google Scholar] [CrossRef]
- Robertson, D.C.; Camps, O.I.; Mayer, J.S.; Gish, W.B. Wavelets and electromagnetic power system transients. IEEE Trans. Power Deliv. 1996, 11, 1050–1058. [Google Scholar] [CrossRef]
- Akimoto, Y.; Yamamoto, T.; Hosakawa, H.; Sakaguchi, T.; Yoshida, T.; Nishida, S. Fault protection based on travelling wave theory, Part 1: Theory. Electr. Eng. Jpn. 1978, 98, 79–86. [Google Scholar] [CrossRef]
- Lei, A.; Dong, X.; Shi, S.; Wang, B. Research of wave-head characteristics of the fault-generated travelling wave on transmission line in different frequency bands. 2015 Mod. Electr. Power Syst. (Meps) 2015, 1–6. [Google Scholar] [CrossRef]
- Tang, L.; Dong, X.; Luo, S.; Shi, S.; Wang, B. A New Differential Protection of Transmission Line Based on Equivalent Travelling Wave. IEEE Trans. Power Deliv. 2016, 32, 1. [Google Scholar] [CrossRef]
- Dong, X.; Luo, S.; Shi, S.; Wang, B.; Wang, S.; Ren, L.; Xu, F. Implementation and application of practical travelling wave based directional protection in UHV transmission lines. IEEE Trans. Power Deliv. 2016, 31, 294–302. [Google Scholar] [CrossRef]
- Goodfellow, I.J. Generative Adversarial Networks. arXiv 2014, arXiv:1406.2661. [Google Scholar] [CrossRef]
- Isola, P.; Zhu, J.-Y.; Zhou, T.; Efros, A.A. Image-to-Image Translation with Conditional Adversarial Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5967–5976. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Pathak, D.; Krahenbuhl, P.; Donahue, J.; Darrell, T.; Efros, A.A. Context Encoders: Feature Learning by Inpainting. arXiv 2016, arXiv:1604.07379. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. arXiv 2015, arXiv:1506.02640. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Mallat, S. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Zhou, C.; Kemp, I. An improved methodology for application of wavelet transform to partial discharge measurement denoising. IEEE Trans. Dielectr. Electr. Insul. 2005, 12, 586–594. [Google Scholar] [CrossRef]
- Mallat, S.; Hwang, W.L. Singularity detection and processing with wavelets. IEEE Trans. Inf. Theory 1992, 38, 617–643. [Google Scholar] [CrossRef]
- Borji, A. Pros and cons of GAN evaluation measures. Comput. Vis. Image Underst. 2019, 179, 41–65. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Class | P | R | [email protected] | Average Test Time |
|---|---|---|---|---|---|
| YOLO v3 | 2 MHz | 98.1% | 100% | 99.5% | 280.4 ms |
| No. | ||||
|---|---|---|---|---|
| 1 | 0.0451842 | 0.0451830 | 0.0451855 | 48.00% |
| 2 | 0.1469605 | 0.1469589 | 0.1469608 | 84.21% |
| 3 | 0.1066807 | 0.1066789 | 0.1066809 | 90.00% |
| 4 | 0.0478147 | 0.0478128 | 0.0478154 | 73.08% |
| 5 | 0.0273322 | 0.0273310 | 0.0273327 | 70.59% |
| 6 | 0.0667762 | 0.0667750 | 0.0667775 | 48.00% |
| 7 | 0.0620182 | 0.0620169 | 0.0620196 | 48.15% |
| 8 | 0.1018685 | 0.1018670 | 0.1018687 | 88.24% |
| 9 | 0.0135866 | 0.0135865 | 0.0135866 | 94.44% |
| 10 | 0.0270906 | 0.0270889 | 0.0270916 | 62.96% |
| 11 | 0.0449620 | 0.0449500 | 0.0449750 | 48.00% |
| 12 | 0.0531665 | 0.0531650 | 0.0531666 | 93.75% |
| 13 | 0.0632626 | 0.0632610 | 0.0632626 | 100.00% |
| 14 | 0.0647566 | 0.0647550 | 0.0647567 | 94.12% |
| 15 | 0.0936843 | 0.0936830 | 0.0936846 | 81.25% |
| 16 | 0.0653522 | 0.0653510 | 0.0653535 | 48.00% |
| 17 | 0.1066807 | 0.1066788 | 0.1066808 | 95.00% |
| 18 | 0.0867760 | 0.0867750 | 0.0867775 | 40.00% |
| 19 | 0.1081824 | 0.1081810 | 0.1081828 | 77.78% |
| 20 | 0.1069024 | 0.1069009 | 0.1069026 | 88.24% |
| 21 | 0.1226621 | 0.1226610 | 0.1226623 | 84.62% |
| 22 | 0.0141324 | 0.0141305 | 0.0141326 | 90.48% |
| 23 | 0.1043904 | 0.1043889 | 0.1043904 | 100.00% |
| 24 | 0.0624564 | 0.0624548 | 0.0624576 | 57.14% |
| 25 | 0.1025027 | 0.1025010 | 0.1025027 | 100.00% |
| 26 | 0.1484780 | 0.1484767 | 0.1484793 | 50.00% |
| 27 | 0.1044980 | 0.1044969 | 0.1044986 | 64.71% |
| 28 | 0.0125204 | 0.0125190 | 0.0125206 | 87.50% |
| 29 | 0.0359905 | 0.0359888 | 0.0359914 | 65.38% |
| 30 | 0.1417161 | 0.1417148 | 0.1417165 | 76.47% |
| Average percentage of accuracy improvement . | 65.19% | |||
| Fault Location | Fault Type | Recording Method | Fault Point | Absolute Error | Relative Error |
|---|---|---|---|---|---|
| 10 km | Ag | Single-ended | 10.19 km | 0.19 km | 1.9% |
| Double-ended | 10.17 km | 0.17 km | 1.7% | ||
| Double-ended based on Pix2Pix | 10.08 km | 0.08 km | 0.8% | ||
| AB | Single-ended | 10.19 km | 0.19 km | 1.9% | |
| Double-ended | 10.09 km | 0.09 km | 0.9% | ||
| Double-ended based on Pix2Pix | 9.94 km | 0.06 km | 0.6% | ||
| 20 km | Ag | Single-ended | 20.15 km | 0.15 km | 0.75% |
| Double-ended | 20.14 km | 0.14 km | 0.7% | ||
| Double-ended based on Pix2Pix | 20.05 km | 0.05 km | 0.25% | ||
| AB | Single-ended | 19.86 km | 0.14 km | 0.7% | |
| Double-ended | 20.14 km | 0.14 km | 0.7% | ||
| Double-ended based on Pix2Pix | 20.04 km | 0.04 km | 0.2% | ||
| 30 km | Ag | Single-ended | 30.22 km | 0.22 km | 0.73% |
| Double-ended | 30.22 km | 0.22 km | 0.73% | ||
| Double-ended based on Pix2Pix | 30.15 km | 0.15 km | 0.5% | ||
| AB | Single-ended | 30.30 km | 0.30 km | 1% | |
| Double-ended | 30.22 km | 0.22 km | 0.73% | ||
| Double-ended based on Pix2Pix | 30.14 km | 0.14 km | 0.47% | ||
| 40 km | Ag | Single-ended | 40.16 km | 0.16 km | 0.4% |
| Double-ended | 40.15 km | 0.15 km | 0.38% | ||
| Double-ended based on Pix2Pix | 40.09 km | 0.09 km | 0.23% | ||
| AB | Single-ended | 40.36 km | 0.36 km | 0.9% | |
| Double-ended | 40.15 km | 0.15 km | 0.38% | ||
| Double-Ended based on Pix2Pix | 40.01 km | 0.01 km | 0.03% | ||
| 50 km | Ag | Single-Ended | 51.71 km | 1.71 km | 3.42% |
| Double-Ended | 51.08 km | 1.08 km | 2.16% | ||
| Double-ended based on Pix2Pix | 50.88 km | 0.88 km | 1.76% | ||
| AB | Single-ended | 51.56 km | 1.56 km | 3.12% | |
| Double-ended | 50.93 km | 0.93 km | 1.86% | ||
| Double-ended based on Pix2Pix | 50.67 km | 0.67 km | 1.35% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Gong, Q.; Zhang, H.; Wang, Y.; Wang, Y. A Novel Pix2Pix Enabled Traveling Wave-Based Fault Location Method. Sensors 2021, 21, 1633. https://doi.org/10.3390/s21051633
Zhang J, Gong Q, Zhang H, Wang Y, Wang Y. A Novel Pix2Pix Enabled Traveling Wave-Based Fault Location Method. Sensors. 2021; 21(5):1633. https://doi.org/10.3390/s21051633
Chicago/Turabian StyleZhang, Jinxian, Qingwu Gong, Haojie Zhang, Yubo Wang, and Yilin Wang. 2021. "A Novel Pix2Pix Enabled Traveling Wave-Based Fault Location Method" Sensors 21, no. 5: 1633. https://doi.org/10.3390/s21051633
APA StyleZhang, J., Gong, Q., Zhang, H., Wang, Y., & Wang, Y. (2021). A Novel Pix2Pix Enabled Traveling Wave-Based Fault Location Method. Sensors, 21(5), 1633. https://doi.org/10.3390/s21051633