
Module for Monitoring the Probe-Skin Contact Force in the Study of Vibration Perception on the Wrist



Abstract
:1. Introduction
2. Materials and Methods
2.1. Pilot Psychoacoustic Study
2.2. Main Psychoacoustic Study
2.3. Contact Force Measurements
2.3.1. Analog Amplifier—AnAmp
2.3.2. Conditioning Module—HX711
long int mea_HX711(int pomH_SCK, int pomH_DOUT) {
long int x = 0;
digitalWrite(pomH_SCK, LOW); //SCK setting to LOW
while (digitalRead(pomH_DOUT) != LOW) // waiting for the state HIGH line Data
{}
for (int i = 0; i < 24; i++) // reading 24-bit data from HX711
{
digitalWrite(pomH_SCK, HIGH); // generating a HIGH pulse of the clock
digitalWrite(pomH_SCK, LOW); // generating a LOW pulse of the clock
bitWrite(x, 0, digitalRead(pomH_DOUT)); // reading data bit
x = x << 1;
}
digitalWrite(pomH_SCK, HIGH);
digitalWrite(pomH_SCK, LOW);
return x;
}
2.4. Contact Force Measurements—Accuracy
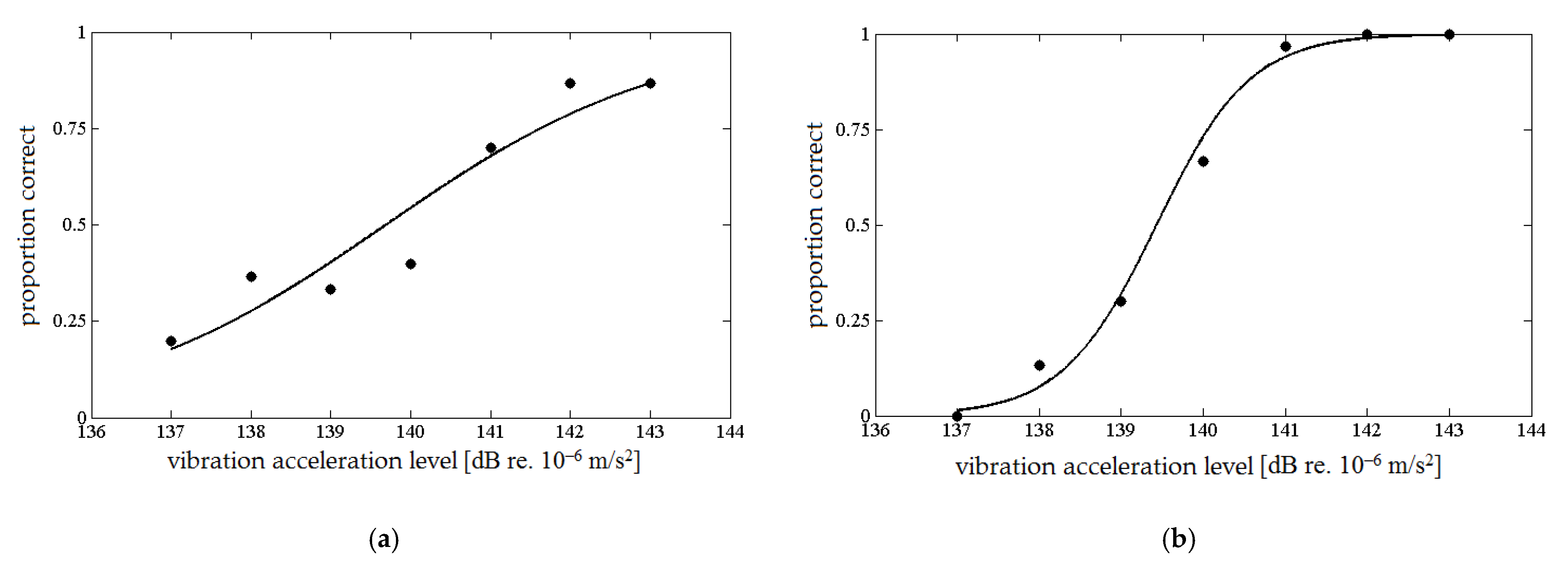
2.5. The Vibrotactile Perception Threshold—Psychophisical Procedure
3. Results
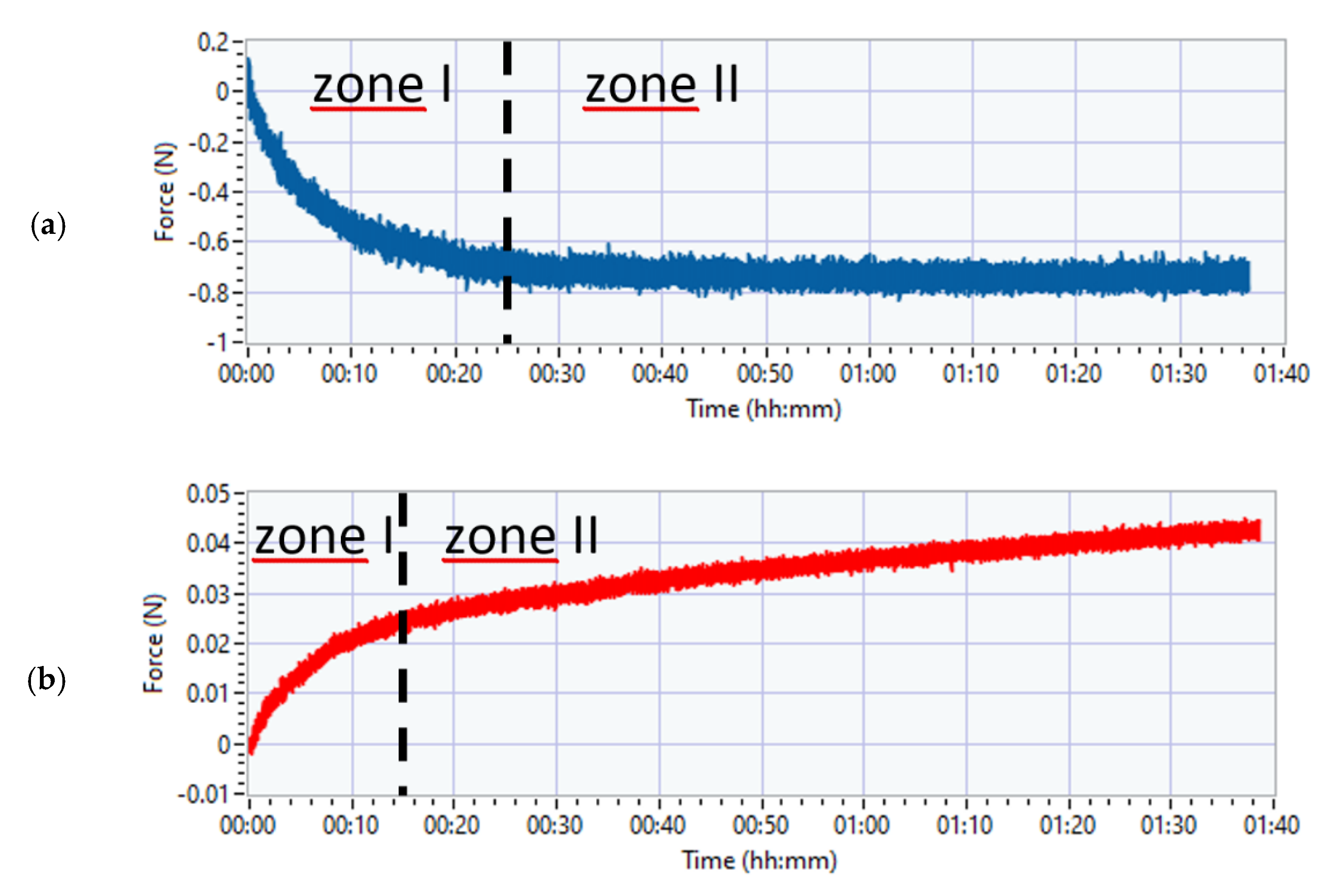
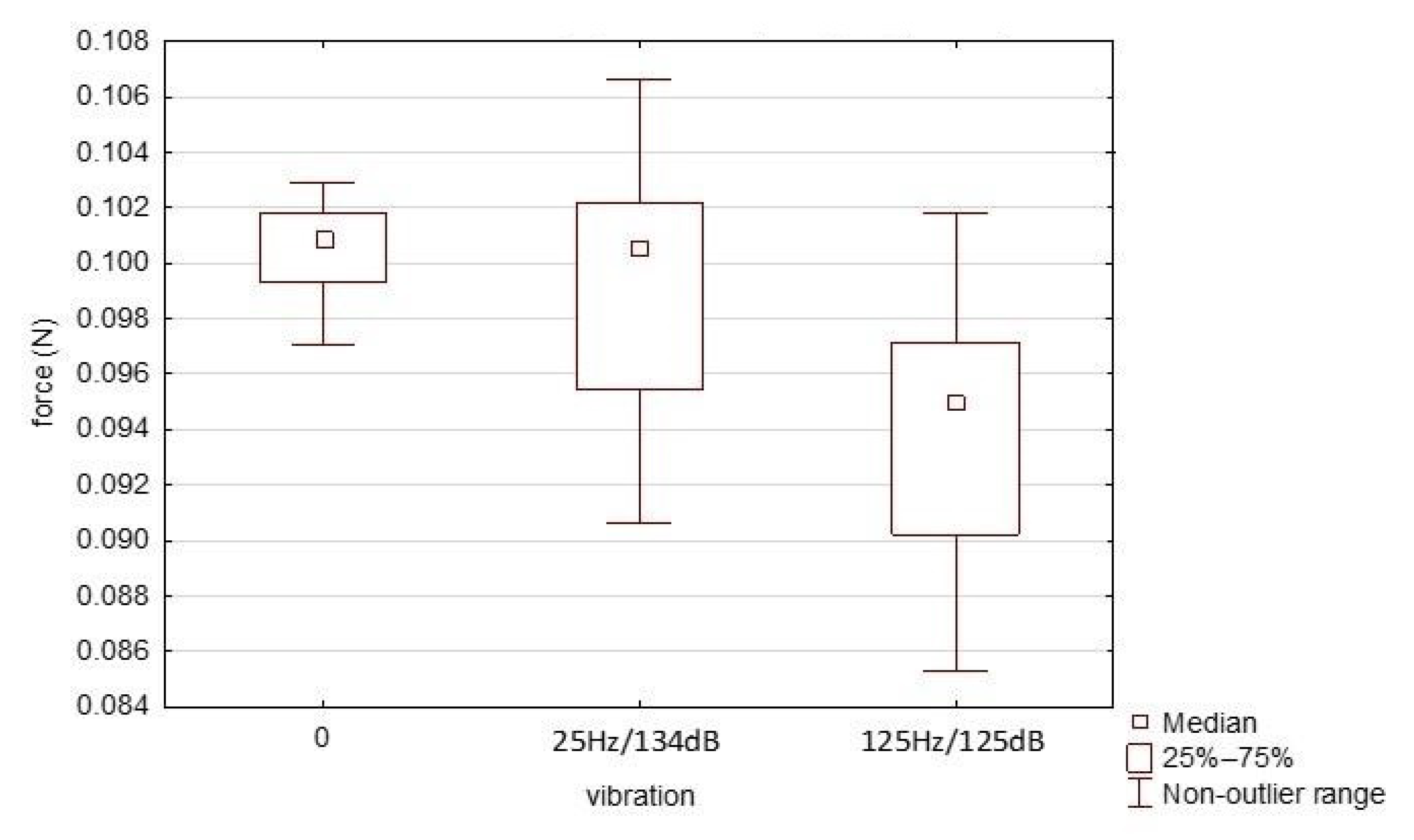
3.1. The Contact Force Measurements
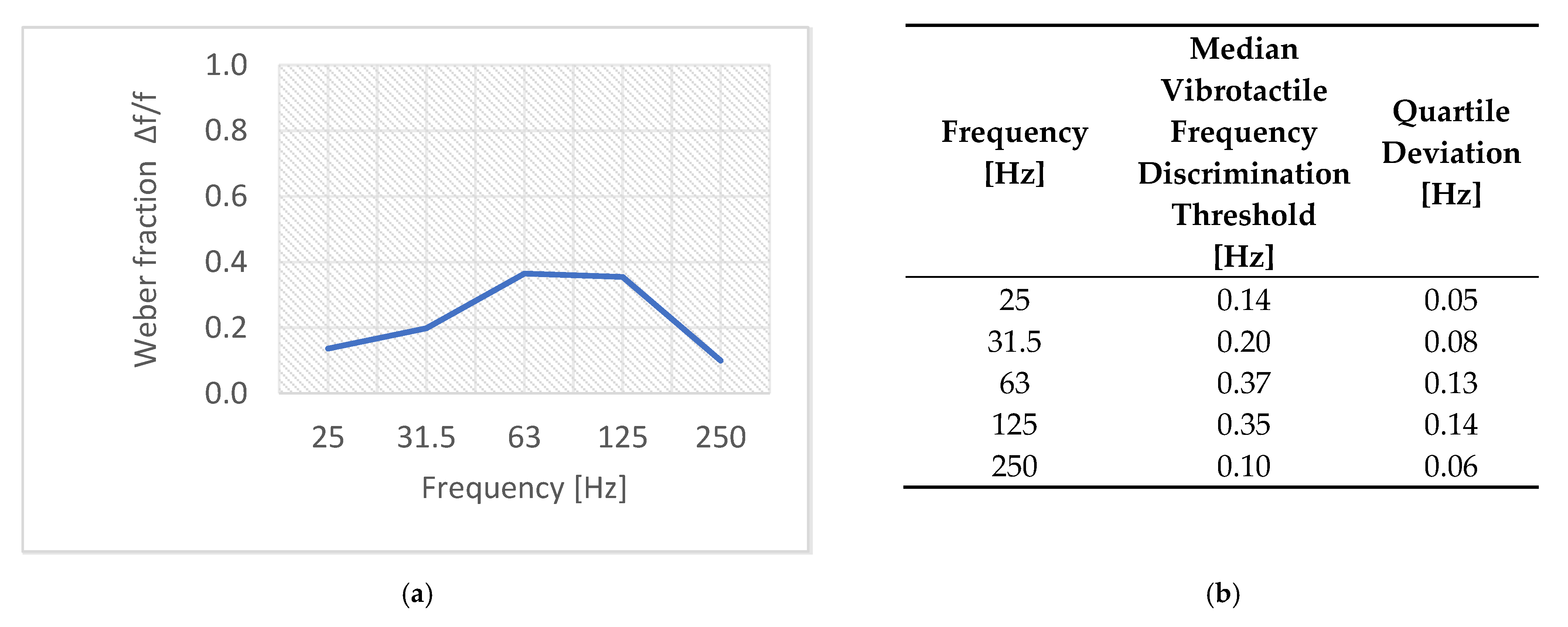
3.2. The Vibrotactile Amplitude and Frequency Discrimination Threshold Measurements
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pezent, E.; Israr, A.; Samad, M.; Robinson, S.; Agarwal, P.; Benko, H.; Colonnese, N. Tasbi: Multisensory squeeze and vibrotactile wrist haptics for augmented and virtual reality. In Proceedings of the 2019 IEEE World Haptics Conference (WHC), Tokyo, Japan, 9–12 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Sreelakshmi, M.; Subash, T.D. Haptic technology: A comprehensive review on its applications and future prospects. Mater. Today Proc. 2017, 4, 4182–4187. [Google Scholar] [CrossRef]
- IEEE World Haptics Conference (WHC). Available online: https://ieeexplore.ieee.org/xpl/conhome/1001635/all-proceedings (accessed on 28 December 2020).
- Chapwouo Tchakoute, L.D.; Menelas, B.A.J. Perception of a haptic stimulus presented under the foot under workload. Sensors 2020, 20, 2421. [Google Scholar] [CrossRef] [PubMed]
- Chapwouo Tchakouté, L.D.; Tremblay, L.; Menelas, B.A.J. Response time to a vibrotactile stimulus presented on the foot at rest and during walking on different surfaces. Sensors 2018, 18, 2088. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wiciak, J.; Borkowski, B.; Czopek, D.; Trojanowski, R.; Okarmus, A.; Zalewska, L.; Bogusz, E.; Furman, A.; Skrodzka, E. Blind in a Big City: System for Determination of Hazardous and Important Areas for Blind and Visually Impaired People Using Wave-Vibration Markers; AGH Publishing Houses: Kraków, Poland, 2012. [Google Scholar]
- Hojan, E.; Jakubowski, M.; Talukder, A.; Wereda, H.; Furmann, A.; Ewertowski, R.; Skrodzka, E.; Perz, P.; Pękala, P.; Bogusz, E. A new method of teaching spatial orientation to the blind. Acta Phys. Pol. A 2012, 121, A5–A8. [Google Scholar] [CrossRef]
- Bogusz, E.; Skrodzka, E.; Hojan, E.; Jakubowski, M.; Talukder, A.; Hojan-Jezierska, D. Sound and vibrations necessary for library of vibroacoustic event addressed to visually impaired persons—Questionnaire results. Pol. J. Environ. Stud. 2011, 20, 1395–1401. [Google Scholar]
- Bogusz, E.; Mrozik, G.; Skrodzka, E. Investigation of vibratory detection thresholds on proximal phalange and wrist in blind and visually impaired teenagers. Acta Phys. Pol. A 2012, 121, A19–A23. [Google Scholar] [CrossRef]
- International Organization for Standardization. Mechanical Vibration—Vibrotactile Perception Threshold for the Assessment of Nerve Dysfunction: Part1—Test Methods for Measurement at the Fingertips; ISO 13091-1; International Standard: Geneva, Switzerland, 2001; pp. 1–21. [Google Scholar]
- Mikkelsen, M.; He, J.; Tommerdahl, M.; Edden, R.A.; Mostofsky, S.H.; Puts, N.A. Reproducibility of flutter-range vibrotactile detection and discrimination thresholds. Sci. Rep. 2020, 10, 6528. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lederman, S.J.; Klatzky, R.L. Haptic perception: A tutorial. Atten. Percept. Psychophys. 2009, 71, 1439–1459. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Verrillo, R.T.; Bolanowski, S.J. Tactile responses to vibration. In Handbook of Signal Processing in Acoustics; Springer: New York, NY, USA, 2008; pp. 1185–1213. [Google Scholar] [CrossRef]
- Shah, V.A.; Casadio, M.; Scheidt, R.A.; Mrotek, L.A. Spatial and temporal influences on discrimination of vibrotactile stimuli on the arm. Exp. Brain Res. 2019, 237, 2075–2086. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Jesus Oliveira, V.A.; Nedel, L.; Maciel, A.; Brayda, L. Spatial discrimination of vibrotactile stimuli around the head. In Proceedings of the 2016 IEEE Haptics Symposium (HAPTICS), Philadelphia, PA, USA, 8–11 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Venkatesan, L.; Barlow, S.M.; Kieweg, D. Age- and sex-related changes in vibrotactile sensitivity of hand and face in neurotypical adults. Somatosens. Mot. Res. 2015, 32, 44–50. [Google Scholar] [CrossRef] [PubMed]
- Harazin, B.; Harazin-Lechowska, A. Effect of changes in finger skin temperature on vibrotactile perception threshold. Int. J. Occup. Med. Environ. Health 2007, 20, 223–227. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Revelle, W. Psych: Procedures for Psychological, Psychometric, and Personality Research, Northwestern University. Available online: https://www.scholars.northwestern.edu/en/publications/psych-procedures-for-personality-and-psychological-research (accessed on 28 December 2020).
- Papetti, S.; Järveläinen, H.; Giordano, B.L.; Schiesser, S.; Fröhlich, M. Vibrotactile sensitivity in active touch: Effect of pressing force. IEEE Trans. Haptics 2016, 10, 113–122. [Google Scholar] [CrossRef] [PubMed]
- Lindsell, C.J. Vibrotactile thresholds: Effect of contact forces and skin indentation. In Proceedings of the United Kingdom Informal Group Meeting on Human Response to Vibration, Southampton, UK, September 1997. [Google Scholar]
- Wixted, J.T.; Thompson-Schill, S.L. Stevens’ Handbook of Experimental Psychology and Cognitive Neuroscience; Methods in Psychophysics; Wichmann, F.A., Jäkel, F., Eds.; John Wiley & Sons: New York, NY, USA, 2018; Chapter 7; Volume 5. [Google Scholar] [CrossRef]
- Mahbub, M.H.; Hase, R.; Yamaguchi, N.; Takahashi, H.; Kawano, Y.; Hiroshige, K.; Tanabe, T.; Harada, N. Concomitant changes and response patterns in finger vibrotactile perception and blood flow induced by acute exposure to hand-arm vibration. Bull. Yamaguchi Med. Sch. 2018, 65, 11–20. [Google Scholar]
- Kingdom, F.A.; Prins, N. Psychophysics. In Practical Introduction; Academic Press: London, UK, 2010. [Google Scholar]
- Sieklicki, W.; Barański, R.; Grocholski, S.; Matejek, P.; Dyrda, M. Design and evaluation of the platform for weight-shifting exercises with compensatory forces monitoring. Commun. Comput. Inf. Sci. 2020, 3–28. [Google Scholar] [CrossRef]
- Available online: https://www.mouser.com/datasheet/2/813/hx711_english-1022875.pdf (accessed on 28 December 2020).
- Available online: https://media.statsoft.pl/_old_dnn/downloads/analiza_systemu_pomiarowego_msa.pdf (accessed on 28 December 2020).
- Król, A.; Czaja, W.; Kost, G.; Czop, P.; Wszołek, G.; Jakubowski, D. Experimental demonstration of measurement system analysis. Pomiary Autom. Robot. 2013, R.17, 92–96. [Google Scholar]
- Down, M.; Czubak, F.; Gruska, G.; Stahley, S.; Benham, D. Measurement System Analysis. Reference Manual, 4th ed.; Chrysler Group LLC: Auburn Hills, MI, USA; Ford Motor Company: Detroit, MI, USA; General Motors Corporation: Detroit, MI, USA, 2010; ISBN 978-1-60-534211-5. [Google Scholar]
- Ozimek, E. Sound and its perception. In Physical and Psychoacoustic Aspects; PWN: Warsaw-Poznan, Poland, 2002. [Google Scholar]
- Levitt, H. Transformed up-down methods in psychoacoustics. J. Acoust. Soc. Am. 1970, 49, 467–477. [Google Scholar] [CrossRef]
- Czopek, D.; Wiciak, J. Vibrotactile amplitude discrimination on the wrist of visually impaired people. Vib. Phys. Syst. 2019, 30, 49–56. [Google Scholar]
- Czopek, D.; Wiciak, J. Vibrotactile frequency discrimination on the wrist of visually impaired people. J. Vibroeng. 2019, 21, 2242–2249. [Google Scholar] [CrossRef]
- Czopek, D.; Korbiel, T.; Kukulski, B.; Małecki, P.; Pawlik, P.; Stępień, B.; Wszołek, T.; Wszołek, W. New Methods of Signal Processing in the Selected Vibroacoustics Problems, Monographs of the Department of Process Automation of the AGH in Krakow; Publishing House of the Department of Process Automation of the AGH: Krakow, Poland, 2016; ISBN 978-83-64755-20-0. [Google Scholar]
- Cholewiak, R.W.; Collins, A.A. Vibrotactile localization on the arm: Effects of place, space, and age. Percept. Psychophys. 2003, 65, 1058–1077. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Signal Frequency | Vibration Acceleration Level of Reference Signal [dB re. 10−6 m/s2] | Vibration Acceleration Level of Target Signal [dB re. 10−6 m/s2] |
|---|---|---|---|
| 1 | 31.5 | 140 | 137, 138, 139, 140, 141, 142, 143 |
| 2 | 125 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Czopek, D.; Barański, R.; Wiciak, J. Module for Monitoring the Probe-Skin Contact Force in the Study of Vibration Perception on the Wrist. Sensors 2021, 21, 2128. https://doi.org/10.3390/s21062128
Czopek D, Barański R, Wiciak J. Module for Monitoring the Probe-Skin Contact Force in the Study of Vibration Perception on the Wrist. Sensors. 2021; 21(6):2128. https://doi.org/10.3390/s21062128
Chicago/Turabian StyleCzopek, Dorota, Robert Barański, and Jerzy Wiciak. 2021. "Module for Monitoring the Probe-Skin Contact Force in the Study of Vibration Perception on the Wrist" Sensors 21, no. 6: 2128. https://doi.org/10.3390/s21062128
APA StyleCzopek, D., Barański, R., & Wiciak, J. (2021). Module for Monitoring the Probe-Skin Contact Force in the Study of Vibration Perception on the Wrist. Sensors, 21(6), 2128. https://doi.org/10.3390/s21062128