
Design and Calibration of Robot Base Force/Torque Sensors and Their Application to Non-Collocated Admittance Control for Automated Tool Changing


Abstract
:1. Introduction
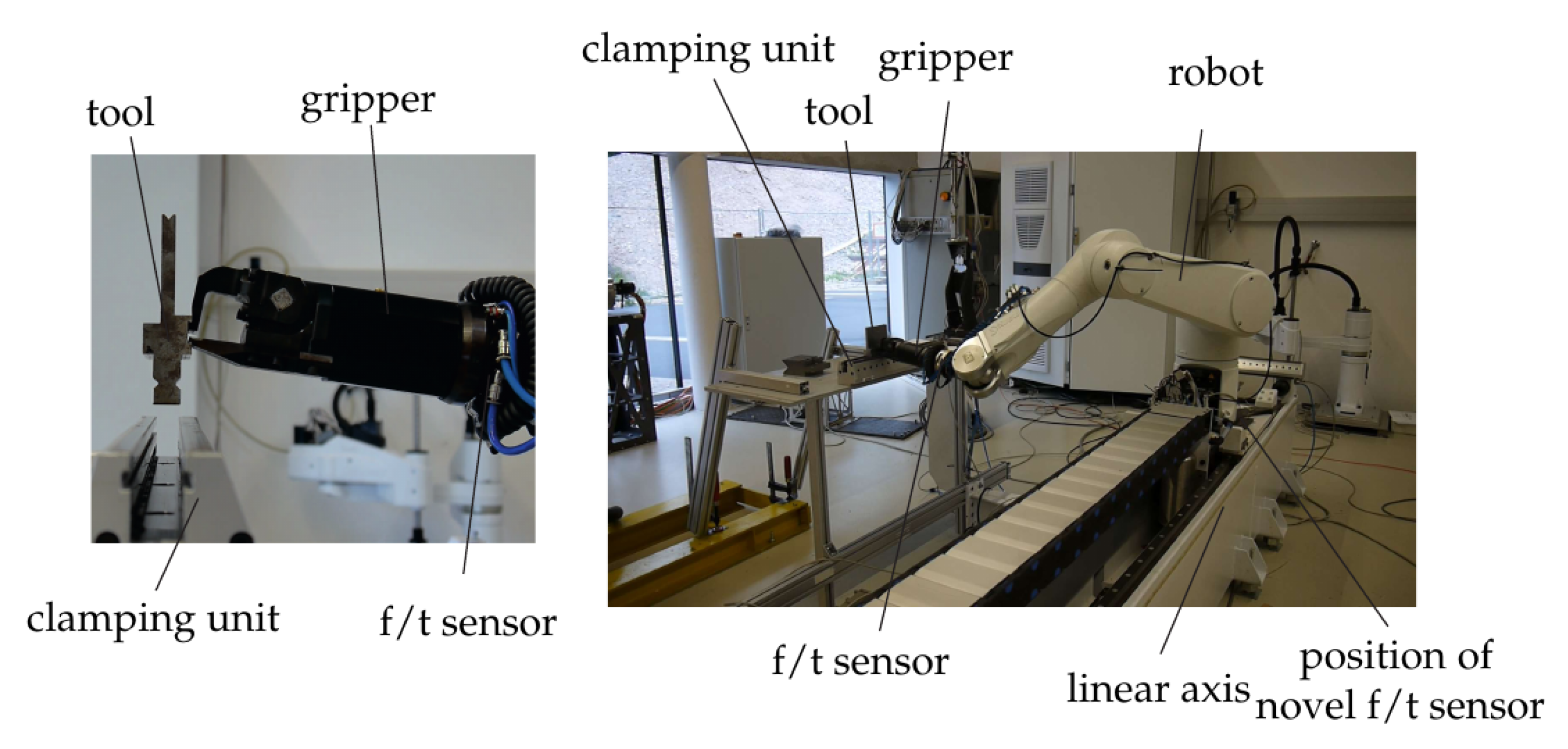
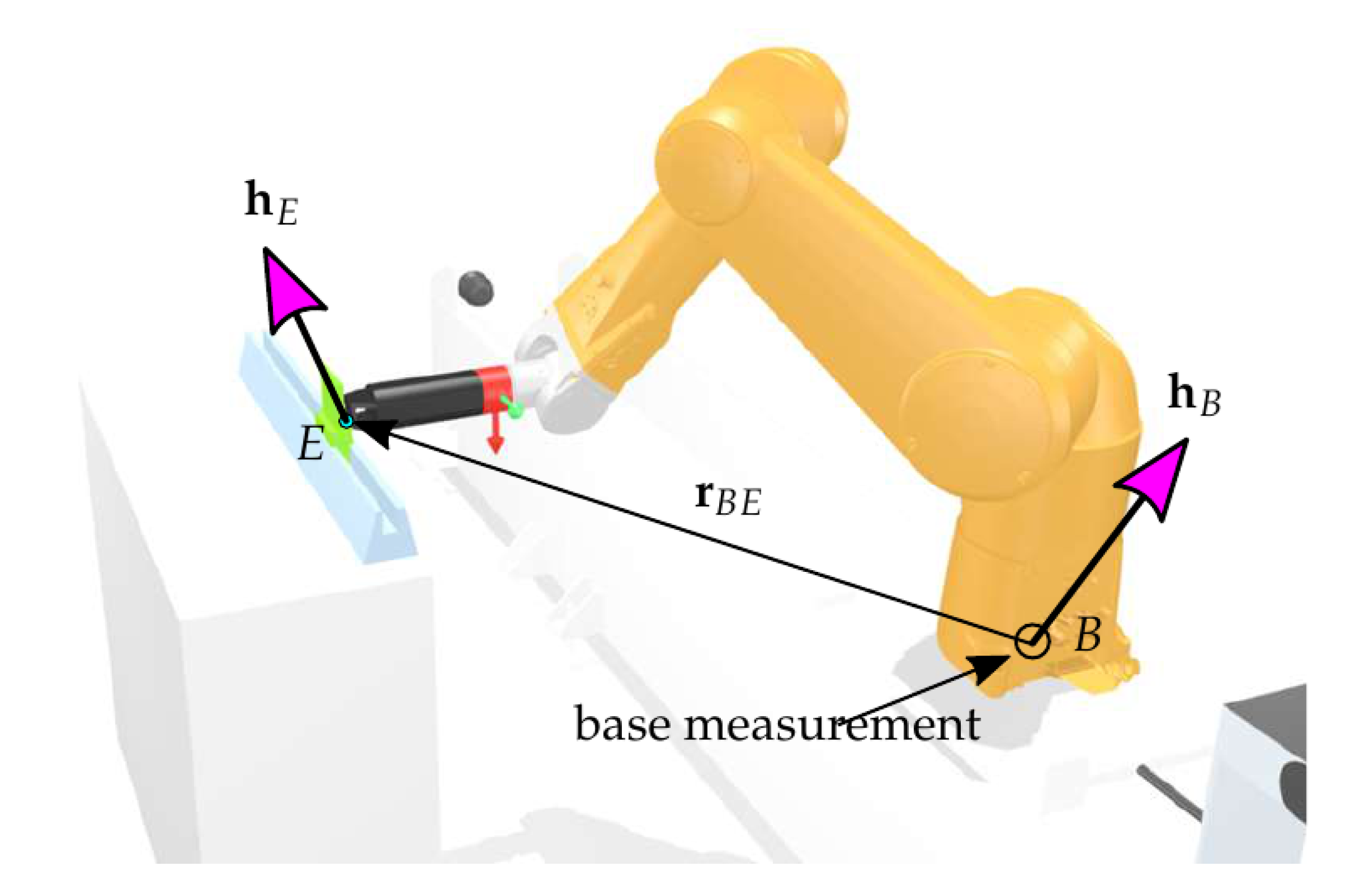
2. Testbed for Tool Changing Application
3. Sensor Concepts
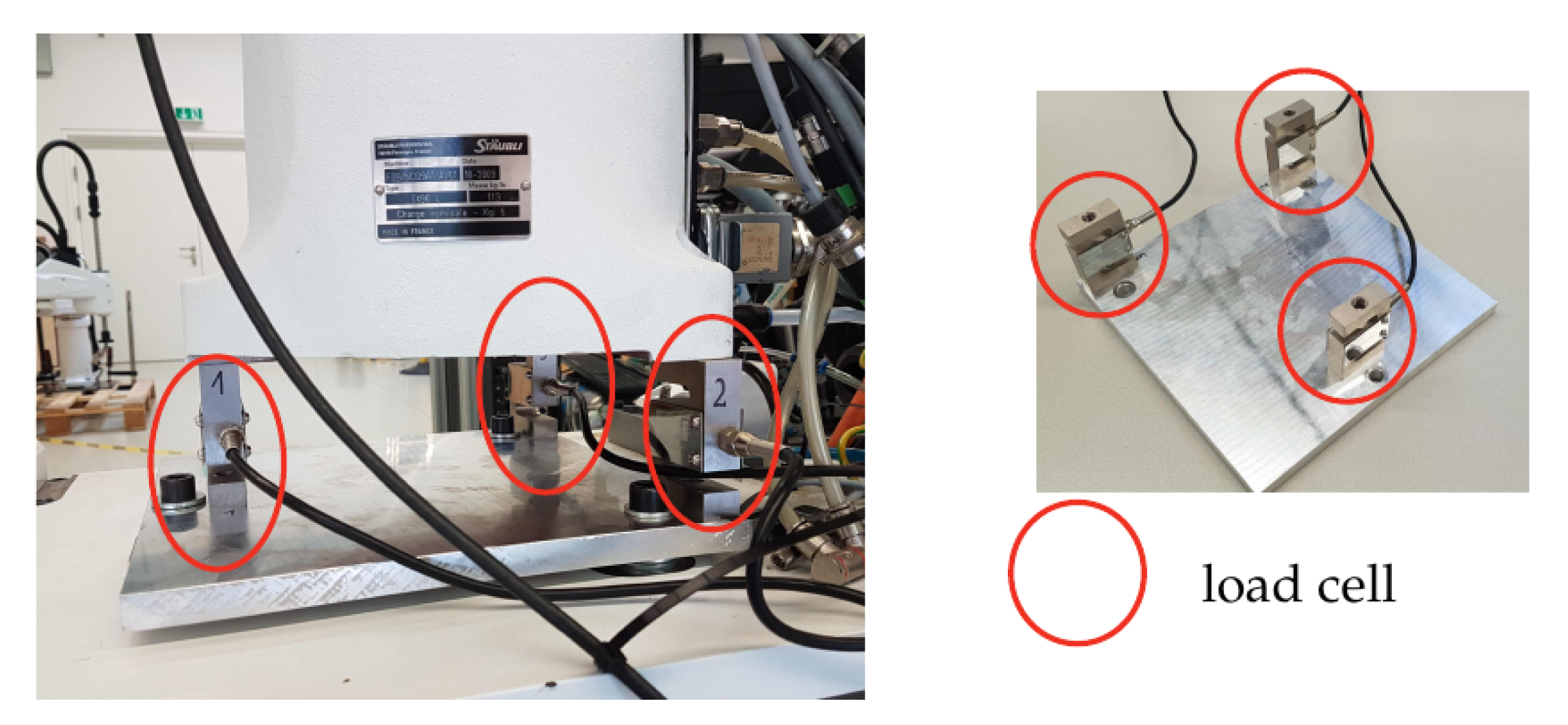
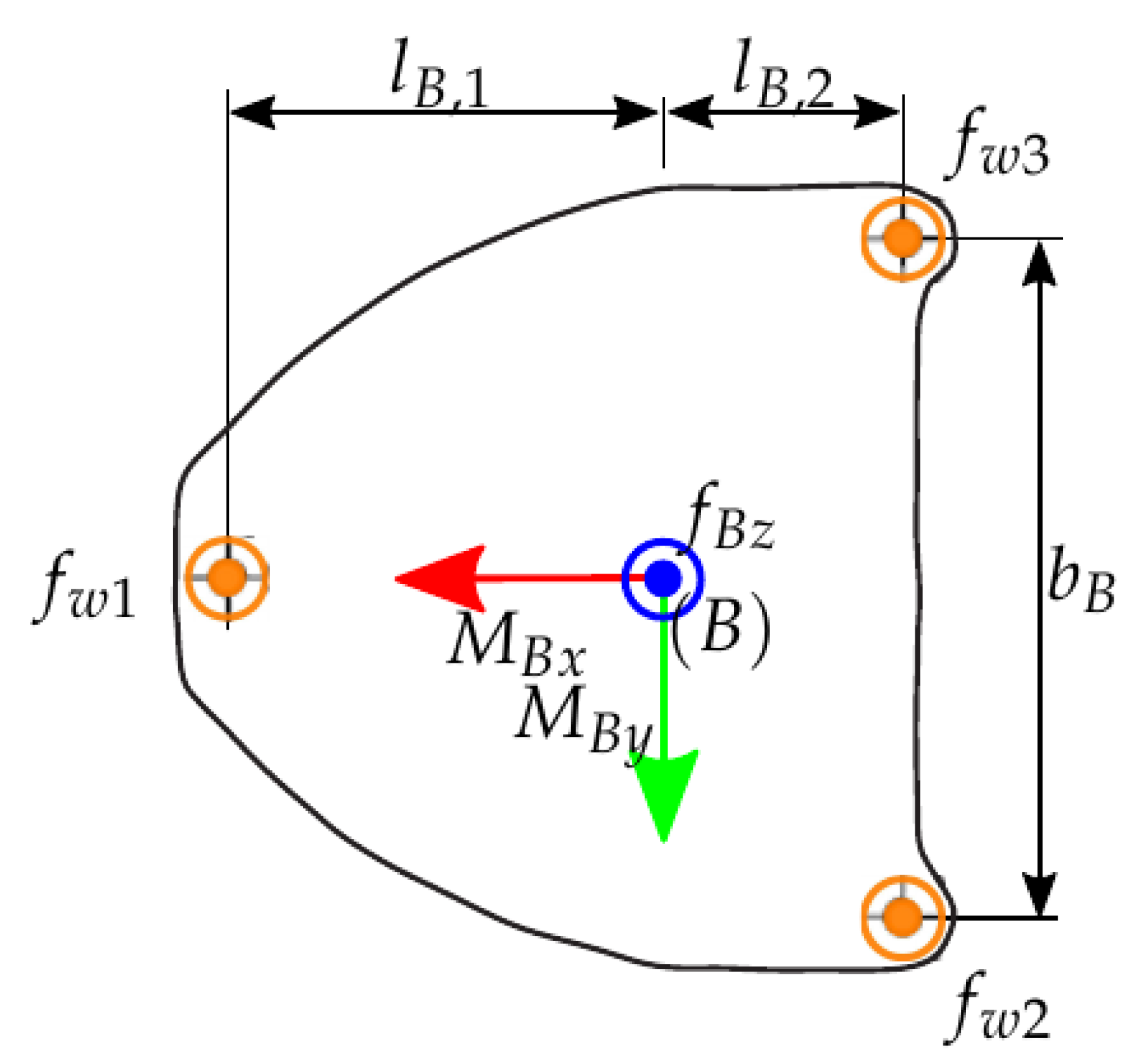
3.1. Base Force/Torque Measurement with Load Cells
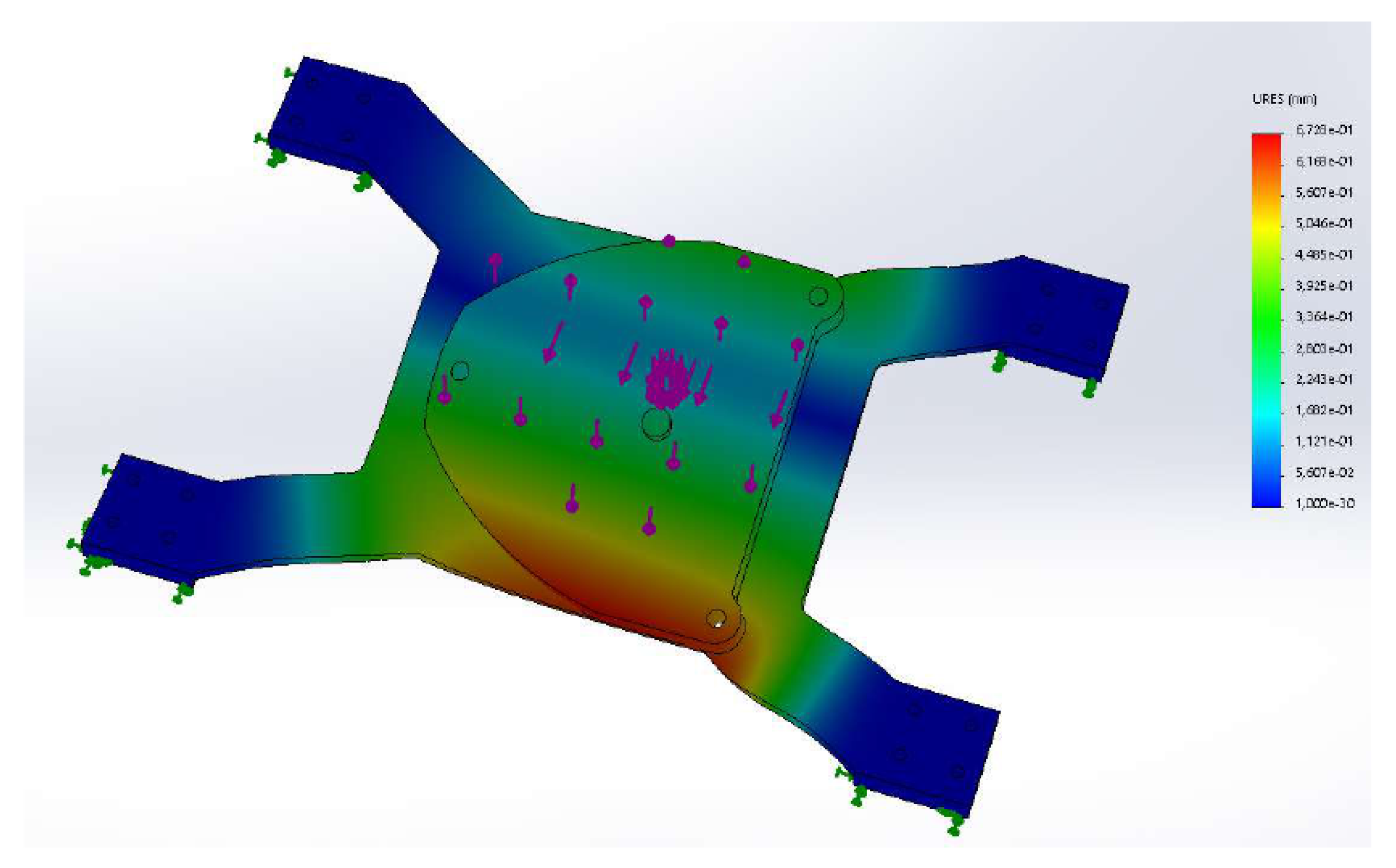
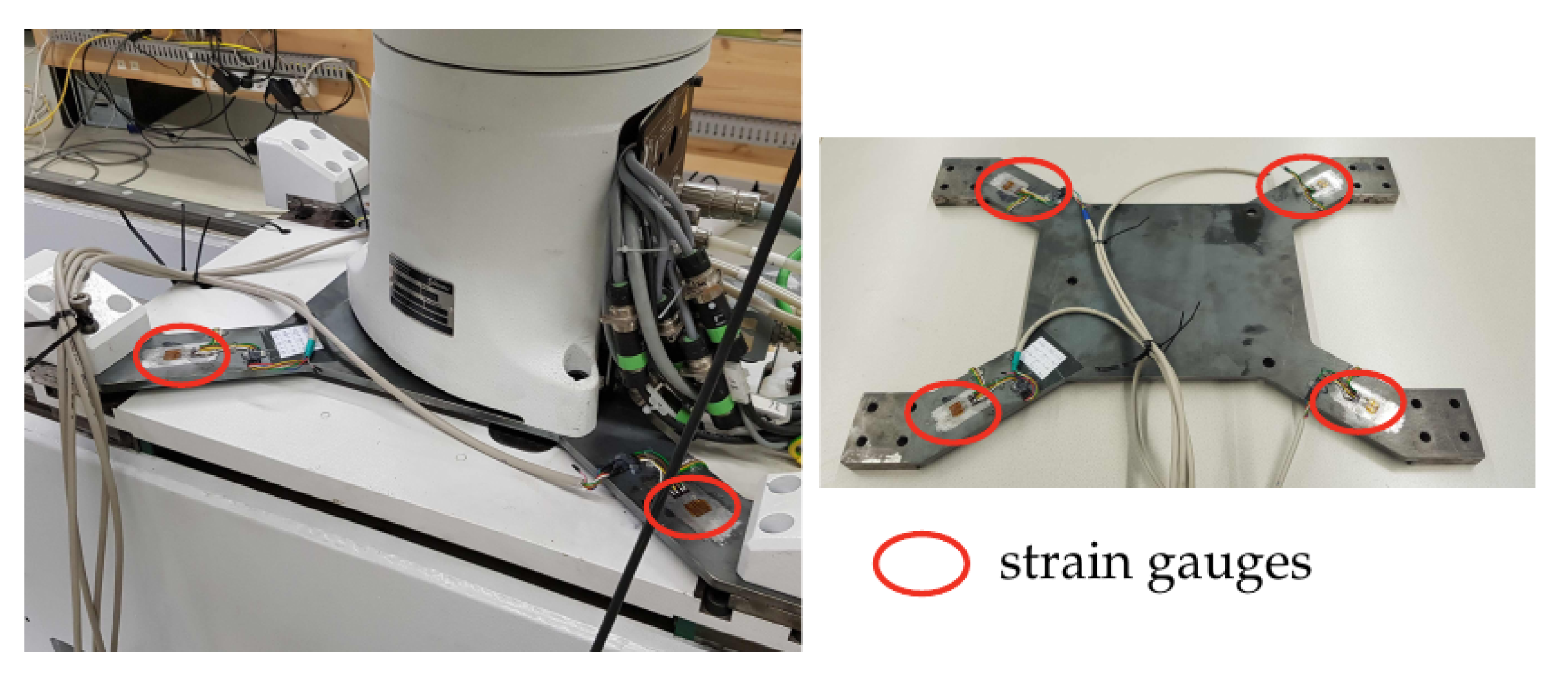
3.2. Base Force/Torque Measurement with a Dedicated Sensor
4. Sensor Calibration
4.1. Base Force/Torque Measurement with Load Cells
4.2. Base Force/Torque Measurement with a Dedicated Sensor
4.3. Calculation of Base Wrench for Calibration
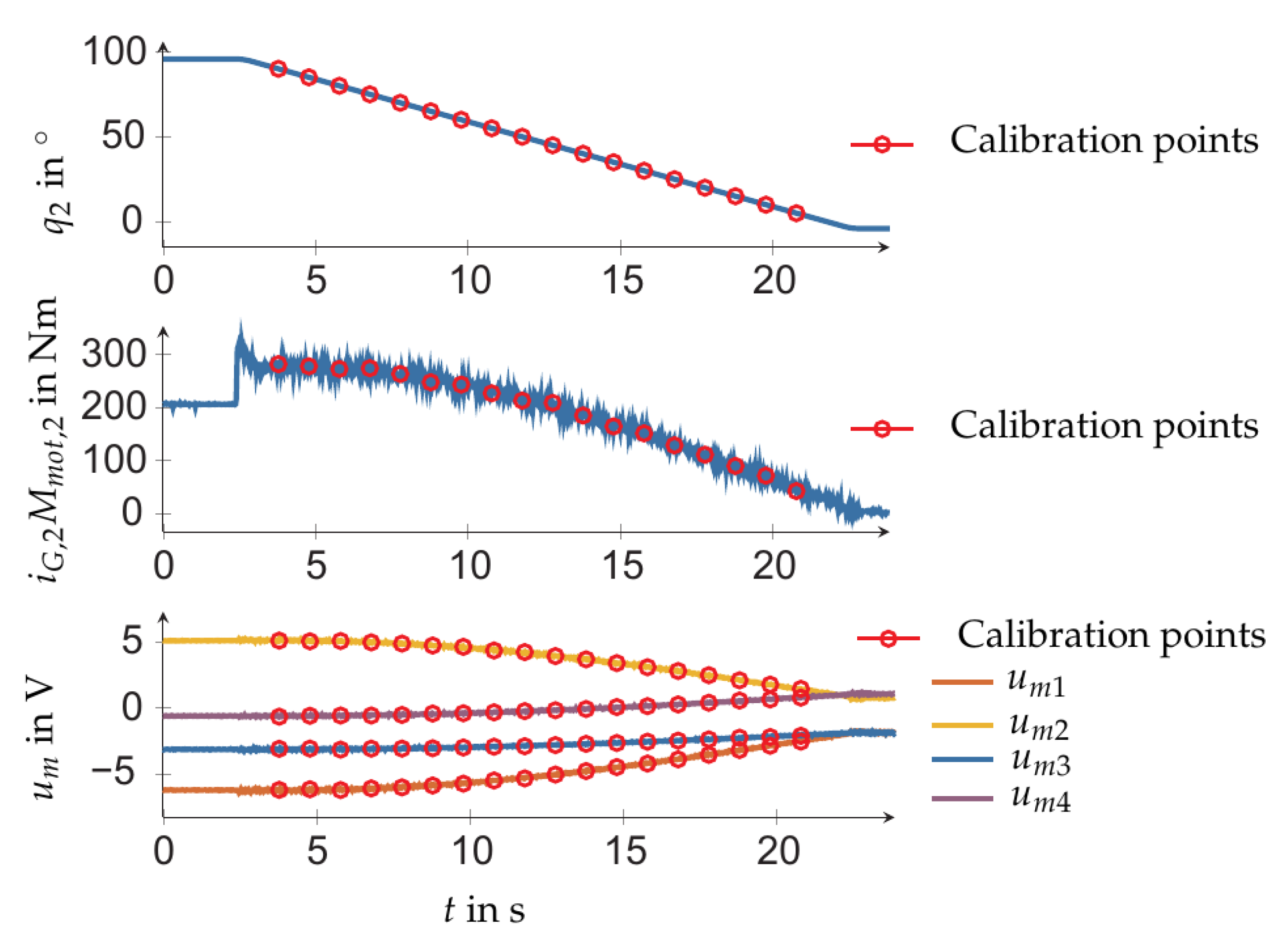
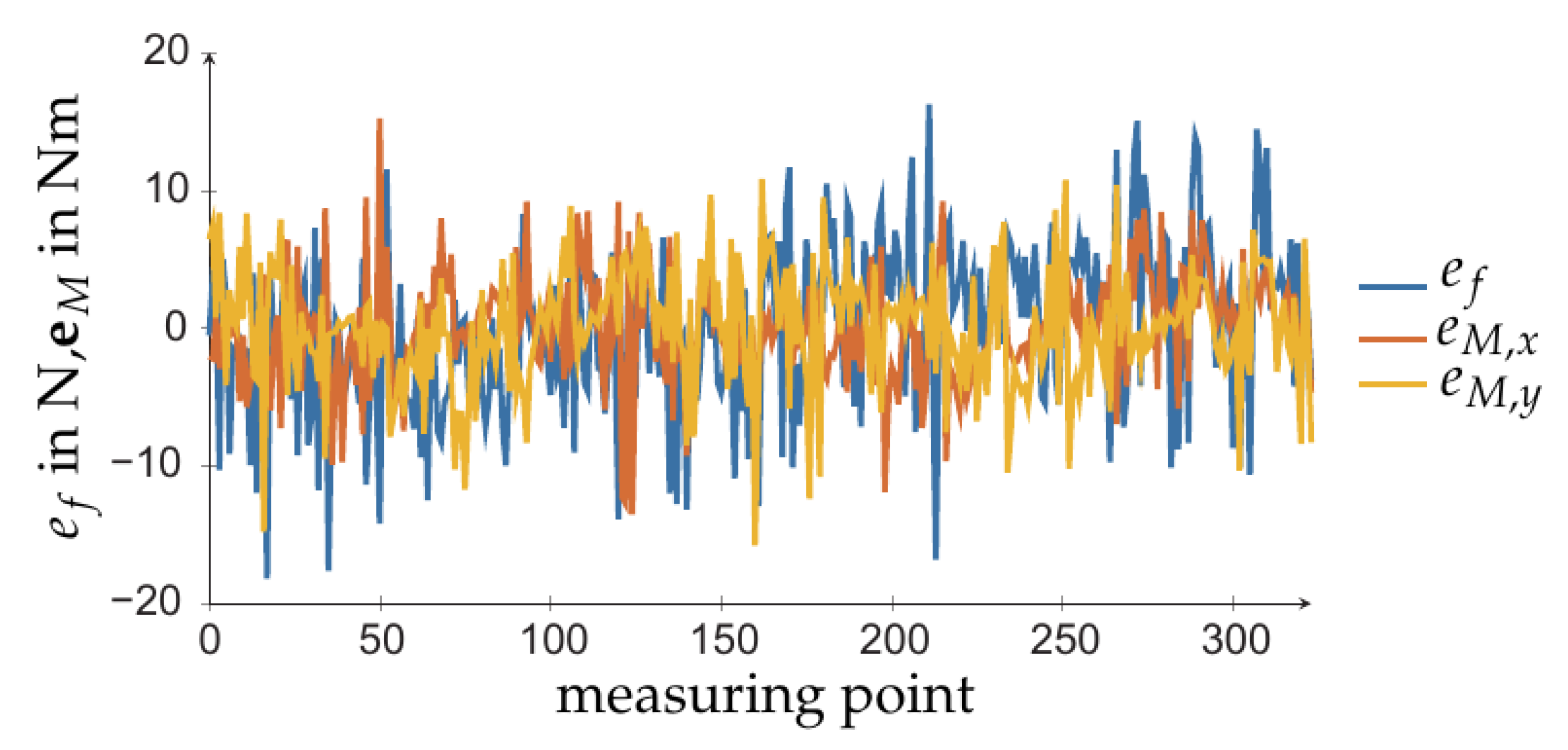
4.4. Calibration Procedure and Results
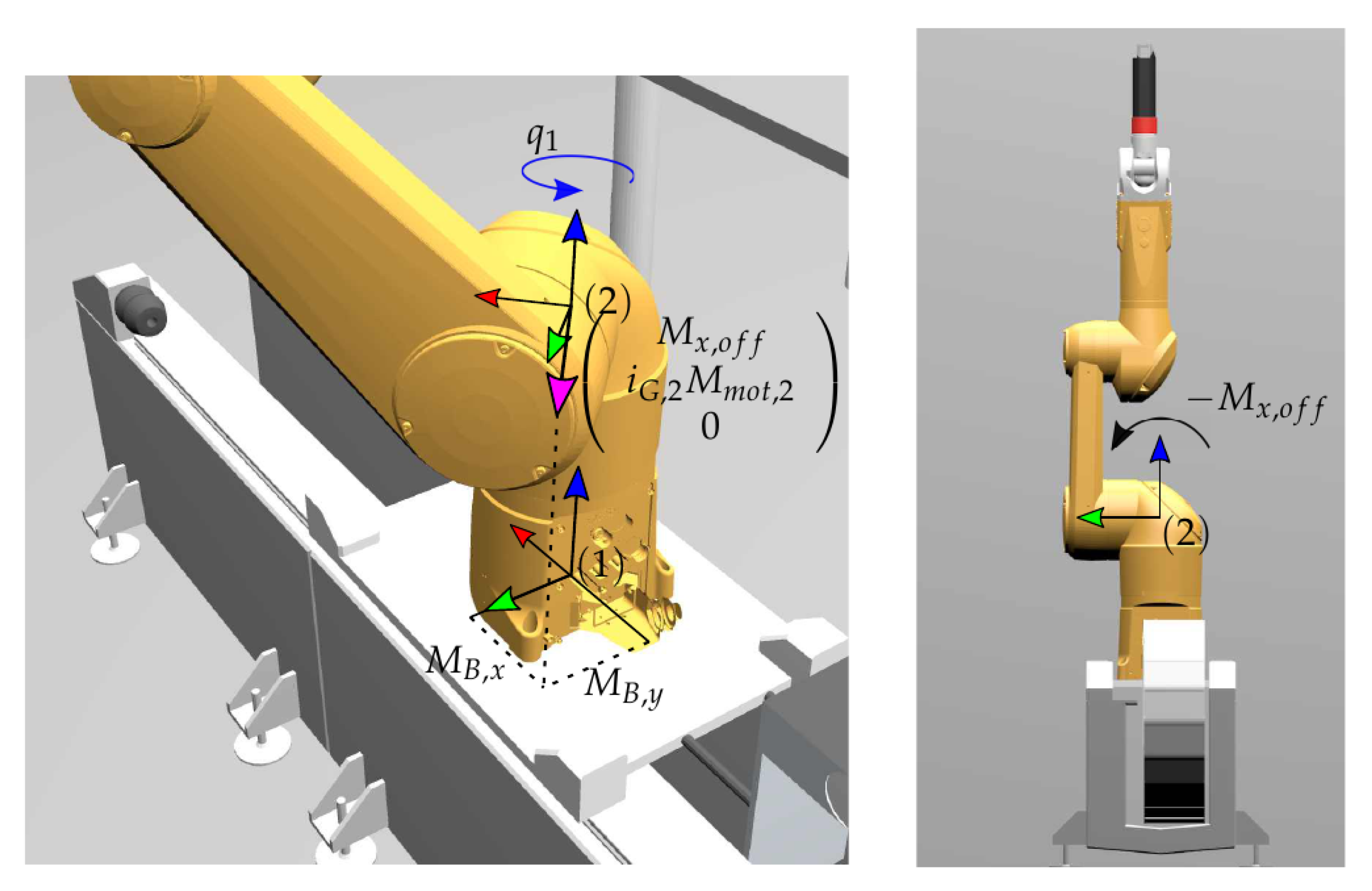
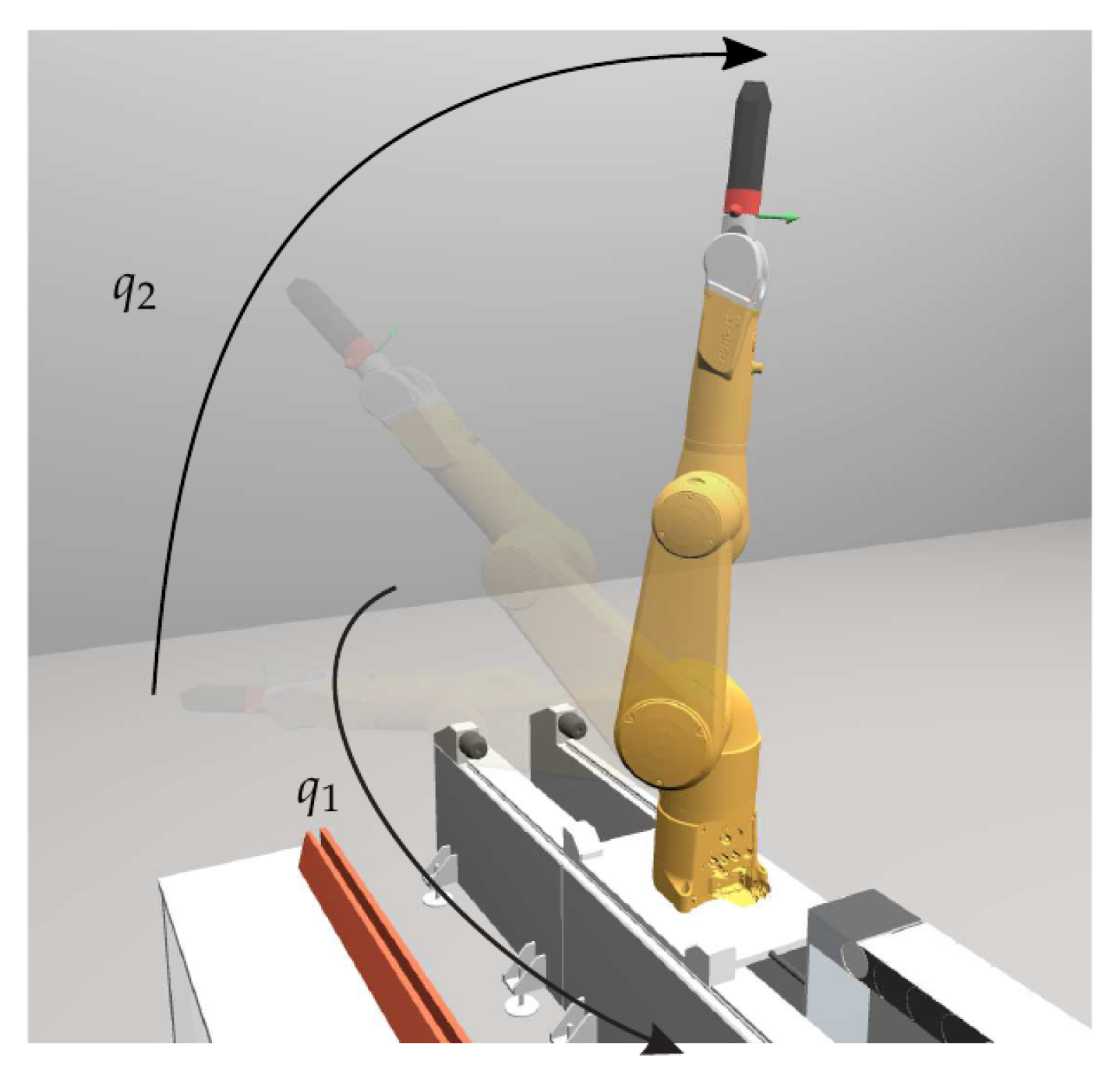
4.5. Compensation of Robot Dynamics
5. Computation of End-Effector Wrenches
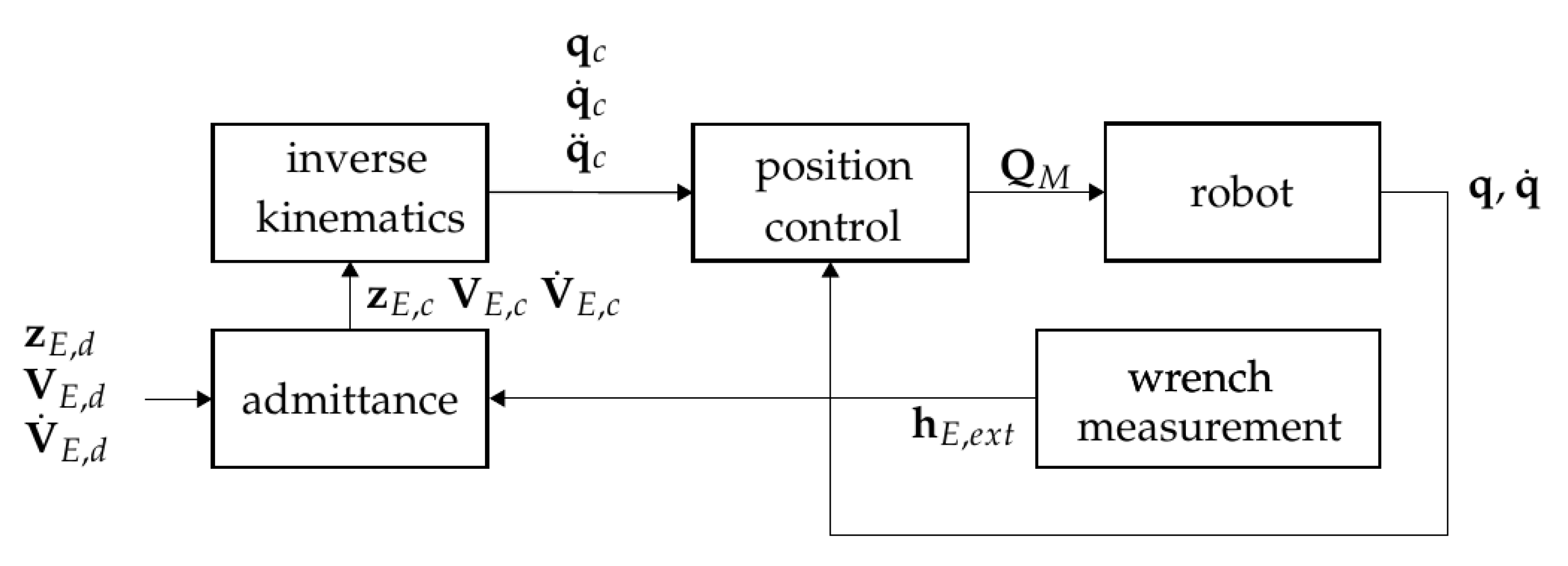
6. Admittance Control
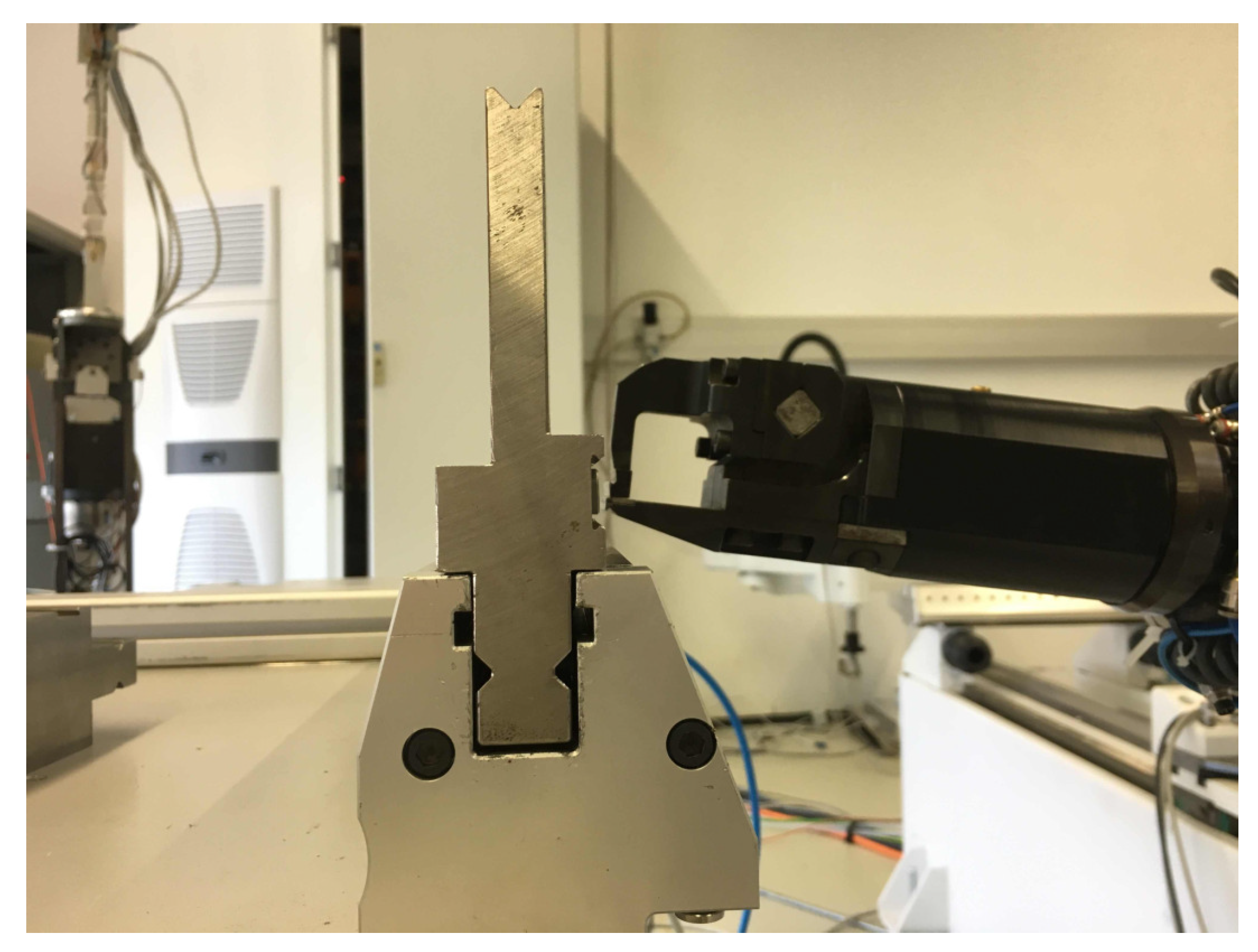
7. Application to Automatic Tool Changing
7.1. Tool Changing Procedure
- Approach tool and get gripper into contact with tool
- Engage tool by gripper
- Unlock tool from toolholder
- Lift gripper to remove tool from toolholder
- Displace the tool (simulating an unknown deviation)
- Insert tool into toolholder
- Lock tool in toolholder
- Release tool from gripper
- Return gripper to reference location
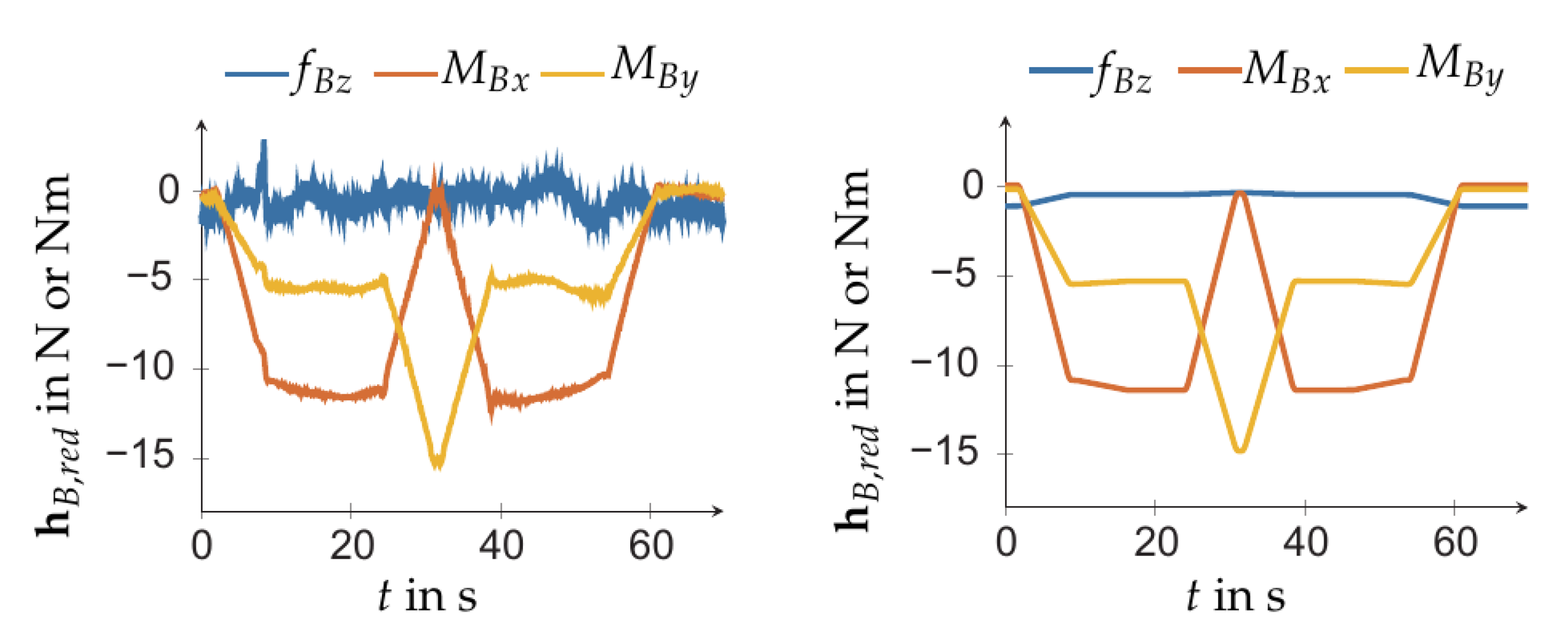
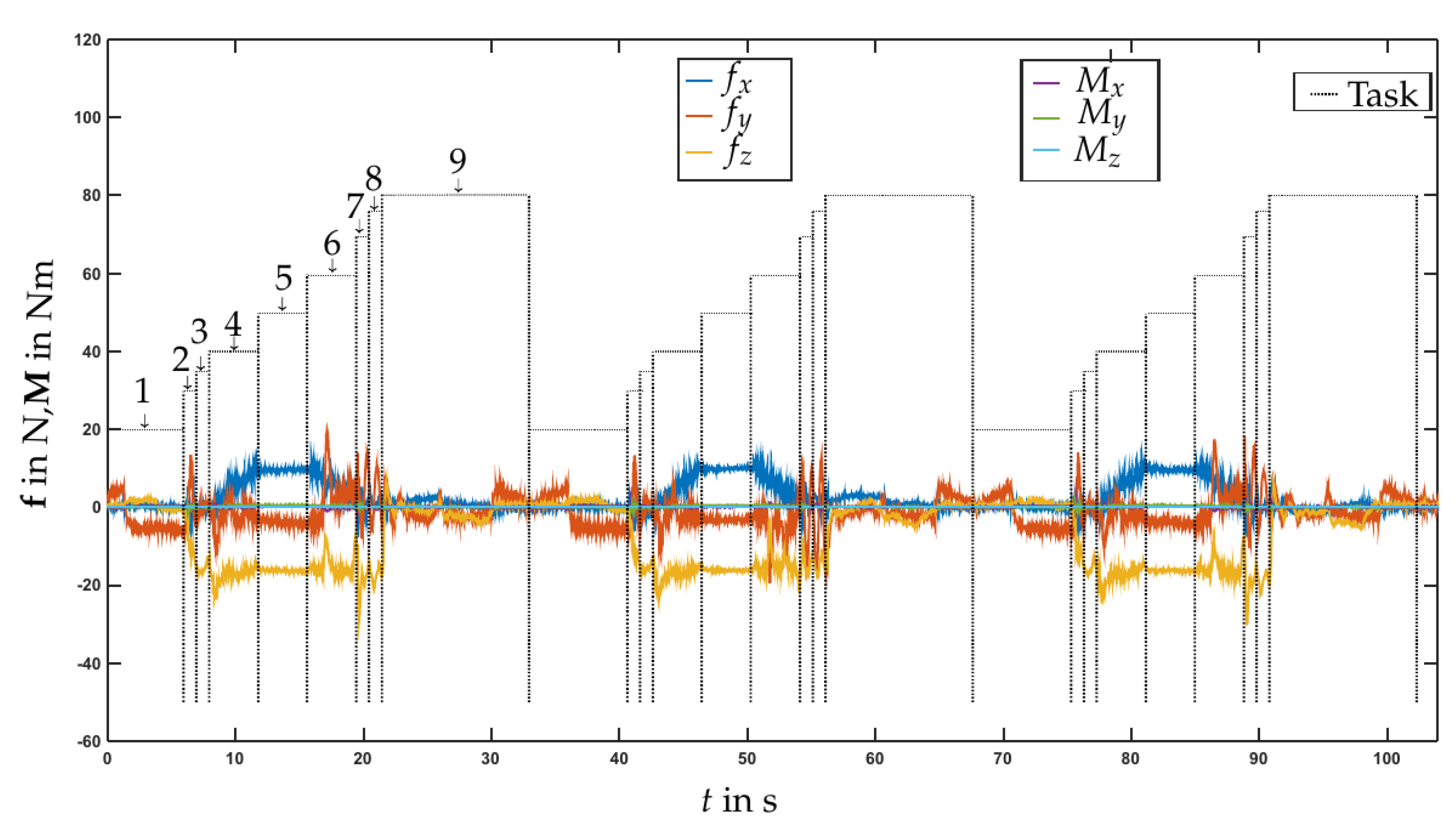
7.2. Experimental Results
8. Discussion and Outlook
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Albu-Schaffer, A.; Eiberger, O.; Grebenstein, M.; Haddadin, S.; Ott, C.; Wimbock, T.; Wolf, S.; Hirzinger, G. Soft robotics. IEEE Robot. Autom. Mag. 2008, 15, 20–30. [Google Scholar] [CrossRef]
- Le Tien, L.; Albu-Schaffer, A.; De Luca, A.; Hirzinger, G. Friction Observer and Compensation for Control of Robots with Joint Torque Measurement. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3789–3795. [Google Scholar] [CrossRef] [Green Version]
- Lu, S.; Chung, J. Collision Detection Enabled Weighted Path Planning: A Wrist and Base Force/Torque Sensors Approach. In Proceedings of the 12th International Conference on Advanced Robotics, ICAR’05, Seattle, WA, USA, 17–20 July 2005; pp. 165–170. [Google Scholar]
- Khalil, W.; Dombre, E. Modeling Identification and Control of Robots; Springer: London, UK, 2004. [Google Scholar]
- Kaserer, D.; Gattringer, H.; Müller, A. Admittance Control of a Redundant Industrial Manipulator without Using Force/Torque Sensors. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 5310–5315. [Google Scholar]
- Morel, G.; Dubowsky, S. The Precise Control Of Manipulators with Joint Friction: A Base Force/Torque Sensor Method. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–20 May 1998; pp. 1–6. [Google Scholar]
- Morel, G.; Dubowsky, S. Base Force/Torque Sensor Apparatus for the Precise Control of Manipulators with Joint Friction and a Method of Use Thereof. U.S. Patent 5767648, 16 June 1998. [Google Scholar]
- Morel, G.; Iagnemma, K.; Dubowsky, S. The precise control of manipulators with high joint-friction using base force/torque sensing. Automatica 2000, 36, 931–941. [Google Scholar] [CrossRef]
- Englsberger, J.; Werner, A.; Ott, C.; Henze, B.; Roa, M.; Garofalo, G.; Burger, R.; Beyer, A.; Eiberger, O.; Schmid, K. Overview of the torque-controlled humanoid robot TORO. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 916–923. [Google Scholar]
- Liu, G.; Iagnemma, K.; Dubowsky, S.; Morel, G. A Base Force/Torque Sensor Approach to Robot Manipulator Inertial Parameter Estimation. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–20 May 1998; pp. 3316–3321. [Google Scholar]
- FANUC. FANUC Collaborative Robots. Available online: www.fanuc.eu/at/en/robots/robot-filter-page/collaborative-robots (accessed on 25 February 2021).
- Ott, C.; Nakamura, Y. Admittance Control using a Base Force/Torque Sensor. IFAC Proc. Vol. 2009, 42, 467–472. [Google Scholar] [CrossRef]
- Ott, C.; Nakamura, Y. Base force/torque sensing for position based Cartesian impedance control. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 3244–3250. [Google Scholar]
- Ott, C.; Albu-Schaffer, A.; Hirzinger, G. A cartesian compliance controller for a manipulator mounted on a flexible structure. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 4502–4508. [Google Scholar]
- Garofalo, G.; Beck, F.; Klodmann, J.; Ott, C. On the Control of Translationally Flexible Base Manipulators. In Proceedings of the European Control Conference, Saint-Petersburg, Russia, 12–15 May 2020. [Google Scholar]
- BR Automation. Available online: https://www.br-automation.com/ (accessed on 25 February 2021).
- Andrade Chavez, F.J.; Traversaro, S.; Pucci, D. Six-Axis Force Torque Sensor Model-Based In Situ Calibration Method and Its Impact in Floating-Based Robot Dynamic Performance. Sensors 2019, 19, 5521. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Parmiggiani, A.; Maggiali, M.; Natale, L.; Nori, F.; Schmitz, A.; Tsagarakis, N.; Victor, J.; Becchi, F.; Sandini, G.; Metta, G. The Design of the iCub Humanoid Robot. Int. J. Humanoid Rob. 2012, 9, 1250027. [Google Scholar] [CrossRef]
- Bremer, H. Elastic Multibody Dynamics: A Direct Ritz Approach; Springer: London, UK, 2008. [Google Scholar]
- Kaserer, D.; Gattringer, H.; Mueller, A. Time Optimal Motion Planning and Admittance Control for Cooperative Grasping. IEEE Robot. Autom. Lett. 2020, 5, 2216–2223. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics—Modelling, Planning and Control; Springer: London, UK, 2010. [Google Scholar]
- Sousa, C.D.; Cortesao, R. Physical feasibility of robot base inertial parameter identification: A linear matrix inequality approach. Int. J. Robot. Res. 2014, 33, 931–944. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum load | 300 kg |
| Supply Voltage | 10 V |
| Resistance | 350 |
| Sensitivity | 2 millivolt per volt |
| Uncertainty | millivolt per volt |
| Load Case | [N] | [Nm] | [Nm] |
|---|---|---|---|
| 1 | 1500 | 0 | 0 |
| 2 | 1500 | 700 | 0 |
| 3 | 1500 | 0 | 700 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gattringer, H.; Müller, A.; Hoermandinger, P. Design and Calibration of Robot Base Force/Torque Sensors and Their Application to Non-Collocated Admittance Control for Automated Tool Changing. Sensors 2021, 21, 2895. https://doi.org/10.3390/s21092895
Gattringer H, Müller A, Hoermandinger P. Design and Calibration of Robot Base Force/Torque Sensors and Their Application to Non-Collocated Admittance Control for Automated Tool Changing. Sensors. 2021; 21(9):2895. https://doi.org/10.3390/s21092895
Chicago/Turabian StyleGattringer, Hubert, Andreas Müller, and Philip Hoermandinger. 2021. "Design and Calibration of Robot Base Force/Torque Sensors and Their Application to Non-Collocated Admittance Control for Automated Tool Changing" Sensors 21, no. 9: 2895. https://doi.org/10.3390/s21092895
APA StyleGattringer, H., Müller, A., & Hoermandinger, P. (2021). Design and Calibration of Robot Base Force/Torque Sensors and Their Application to Non-Collocated Admittance Control for Automated Tool Changing. Sensors, 21(9), 2895. https://doi.org/10.3390/s21092895