
True 3D Nanometrology: 3D-Probing with a Cantilever-Based Sensor


Abstract
:1. Introduction
2. Materials and Methods
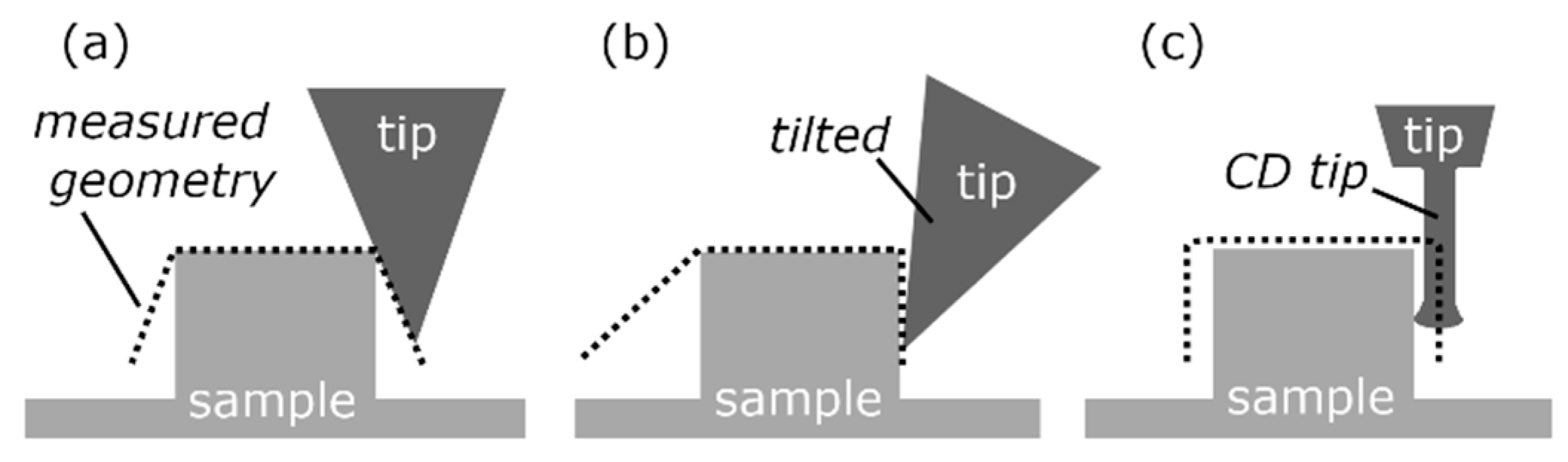
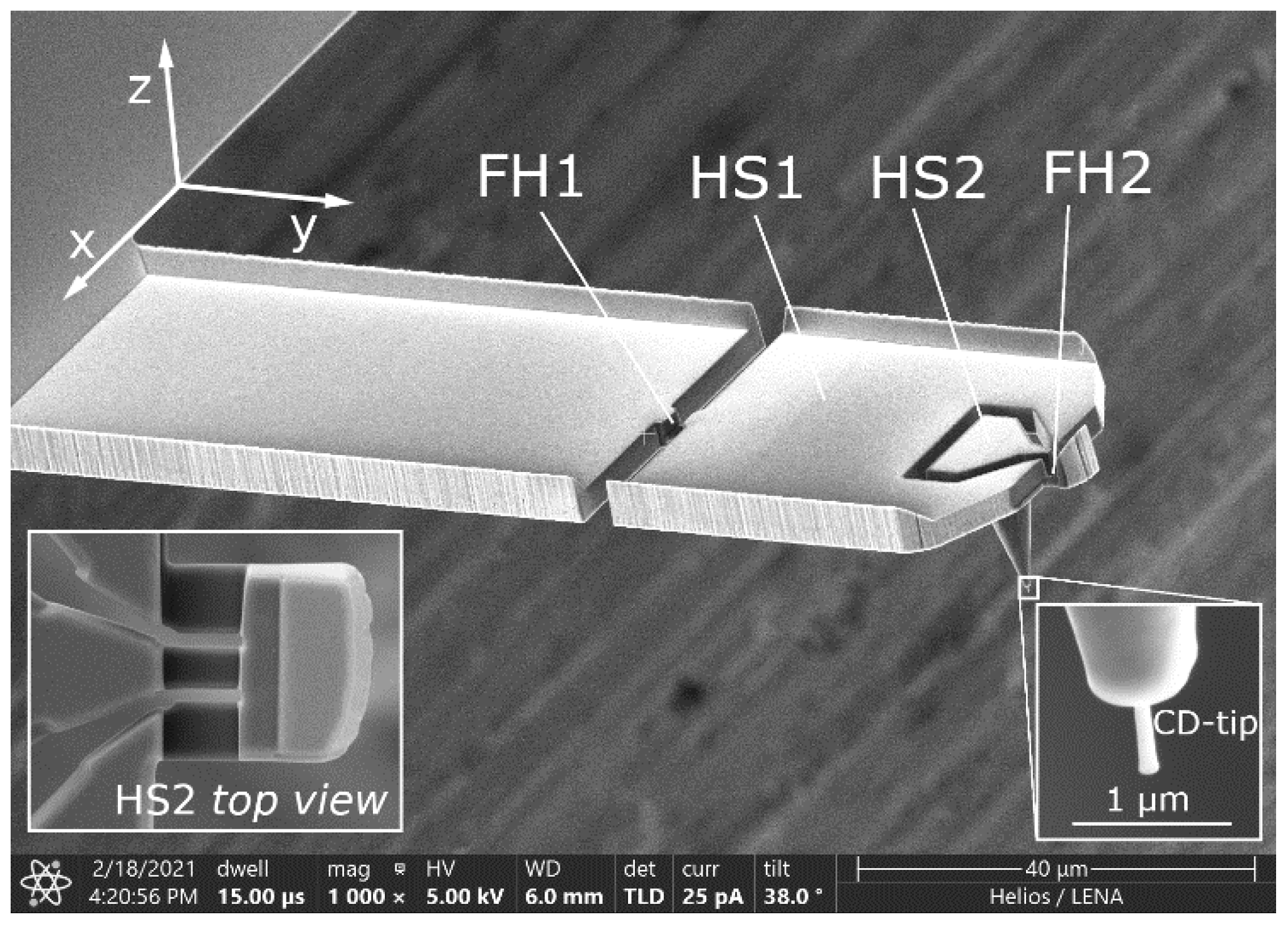
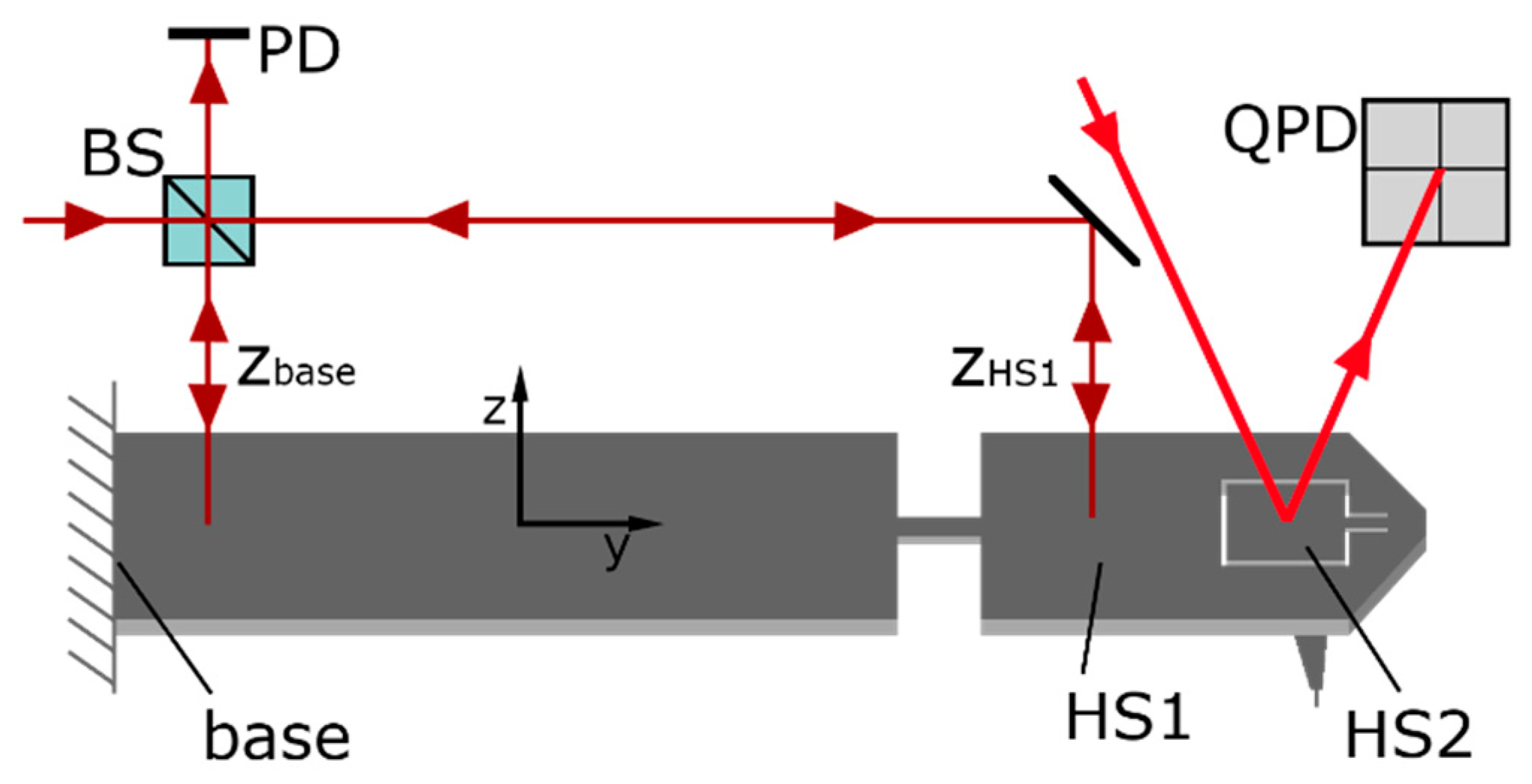
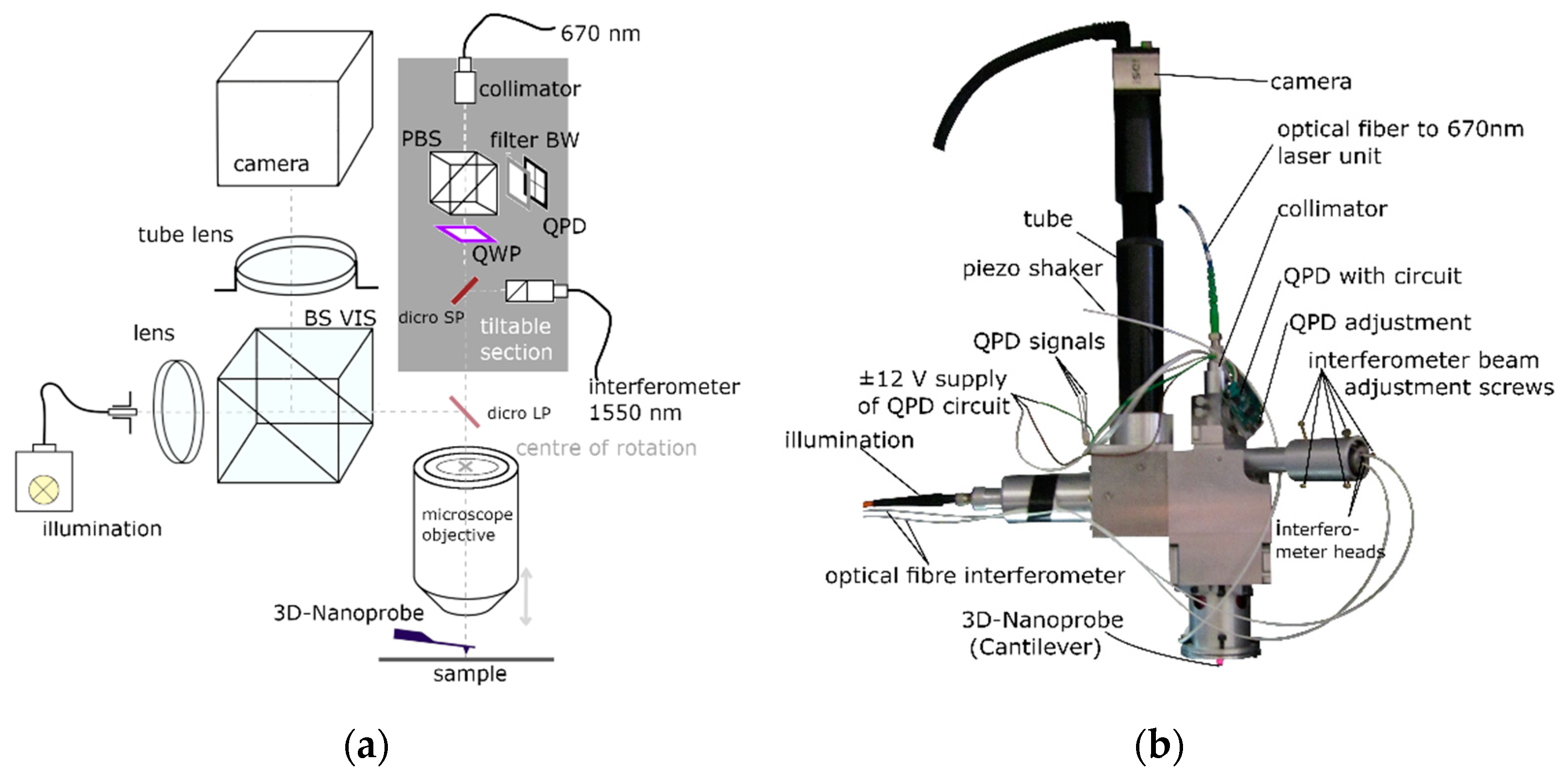
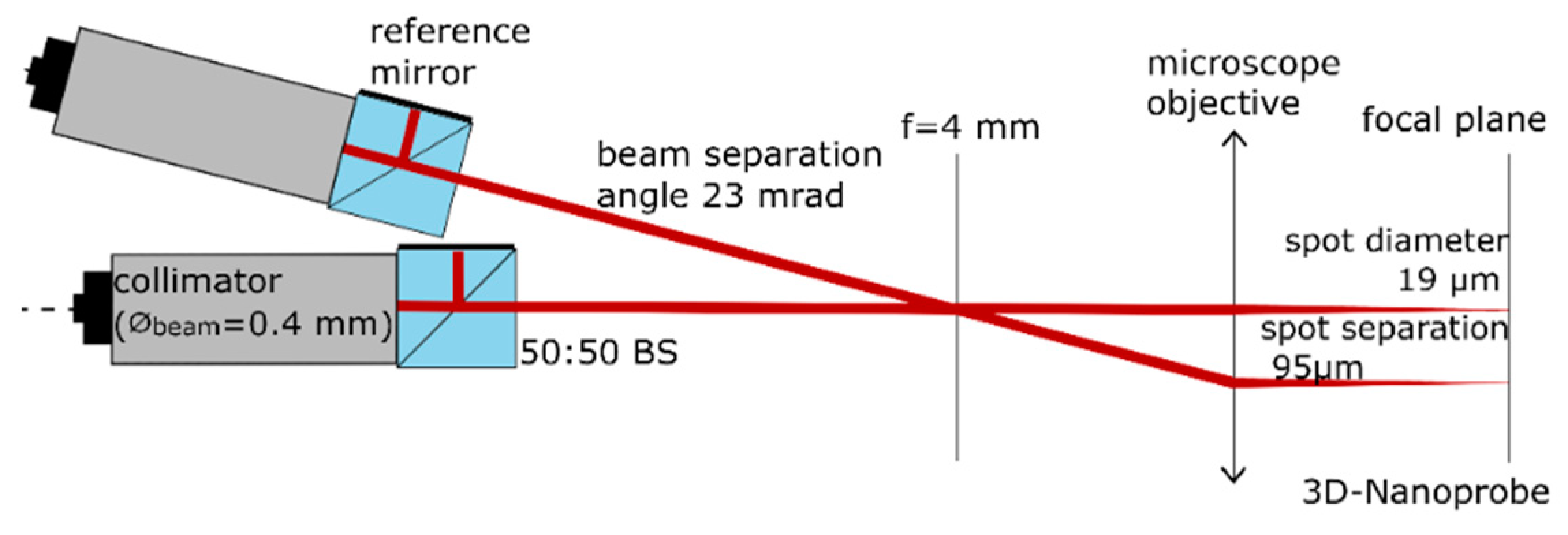
2.1. Design Concept and Detection Principle of the 3D-Nanoprobe
2.2. Modelling of the 3D-Nanoprobes Detection Principle and Calibration Values
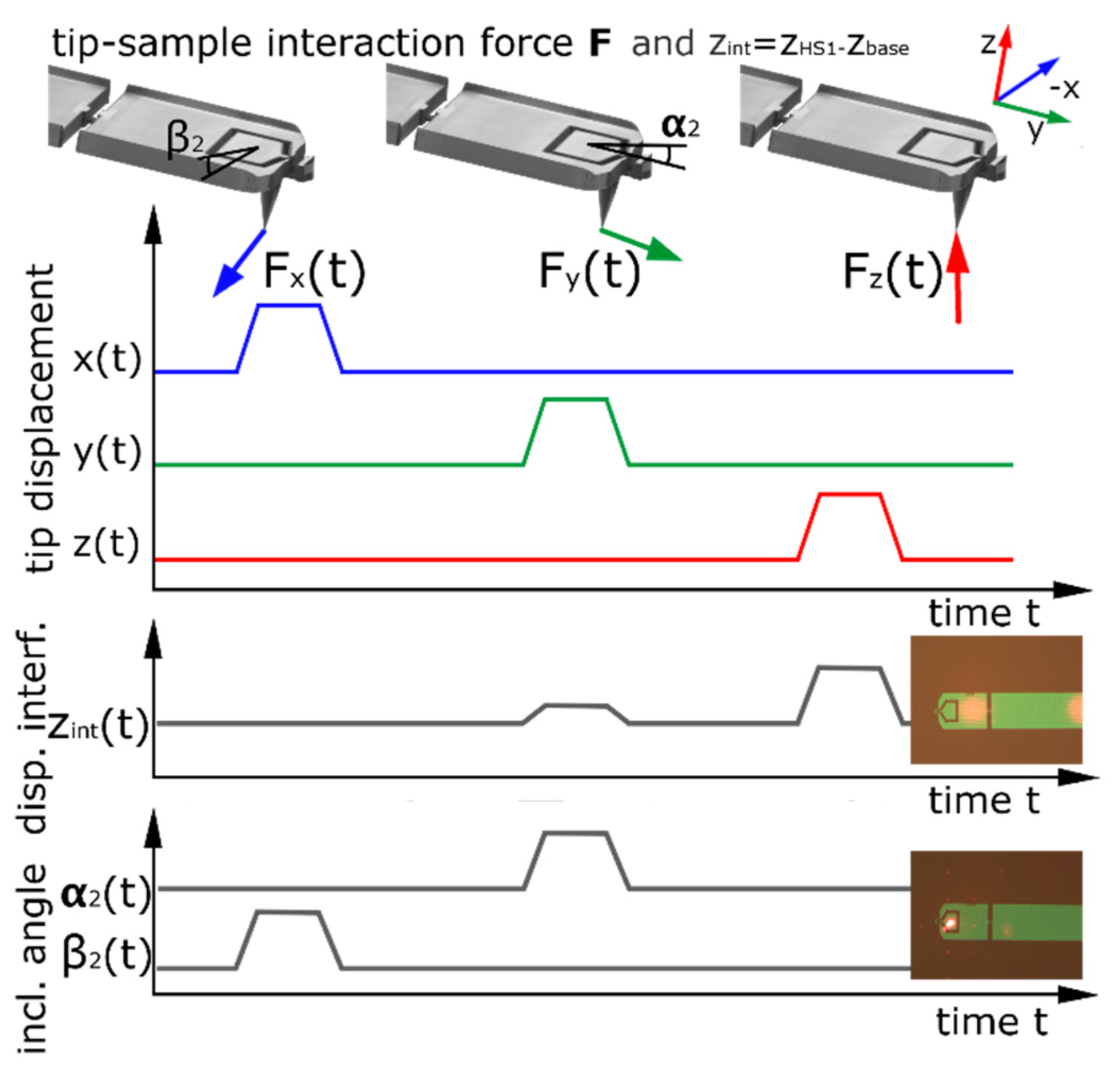
2.2.1. Modeling the Detection Principle of the 3D-Nanoprobes
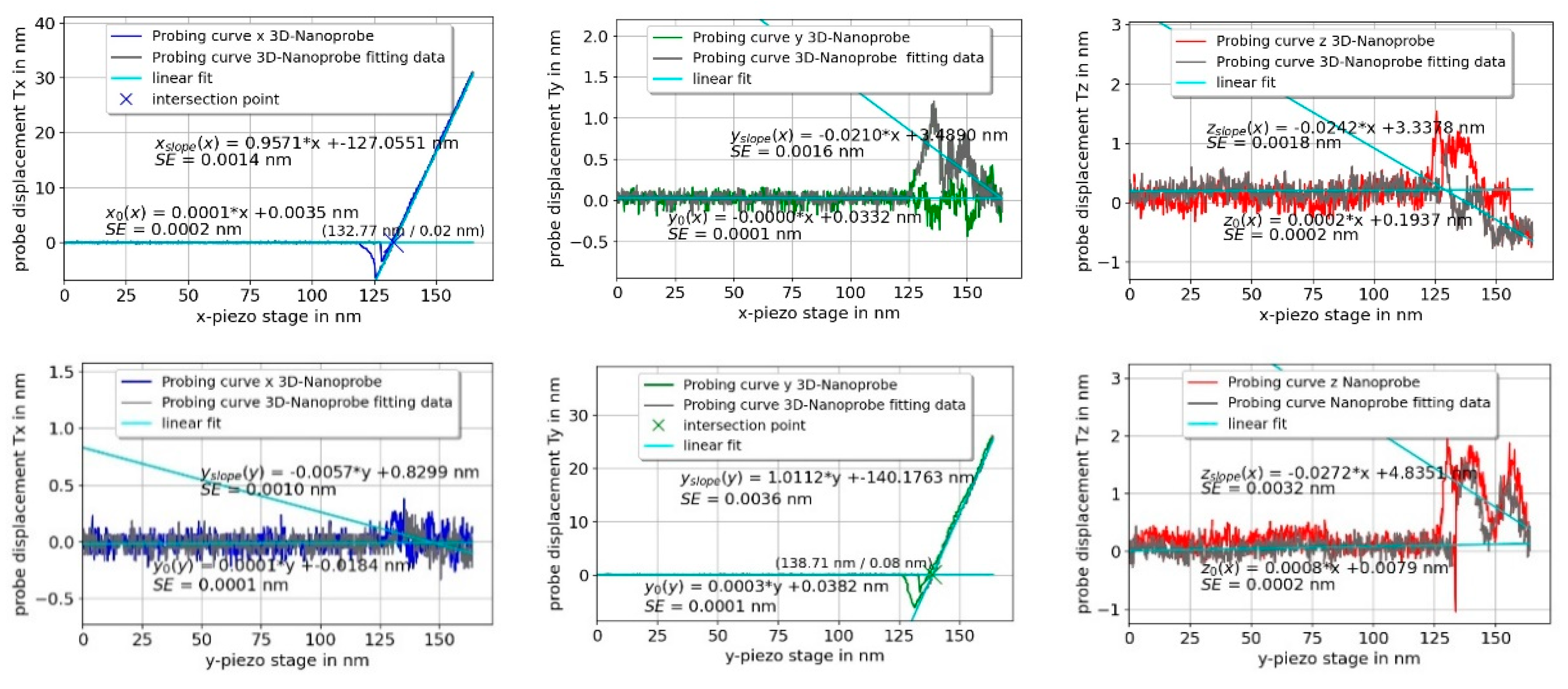
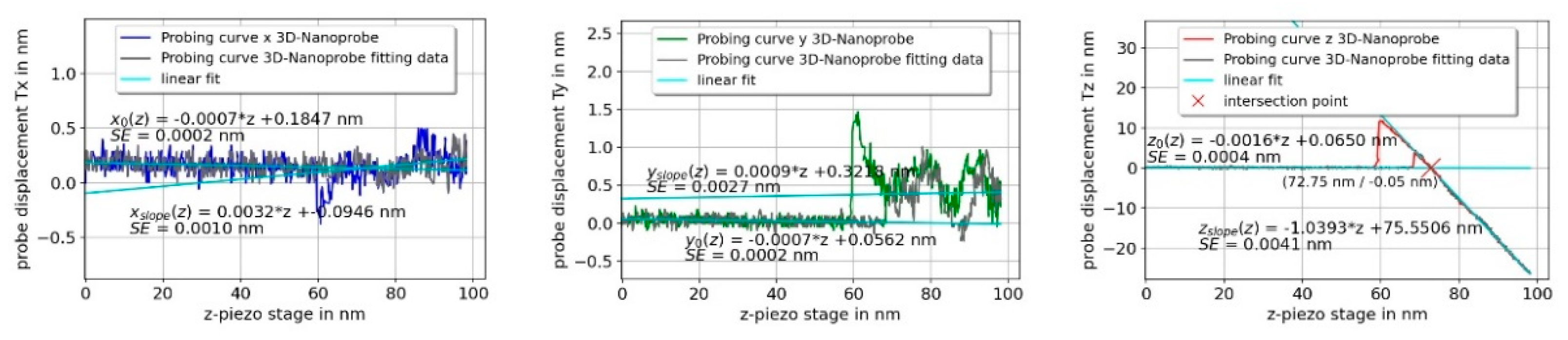
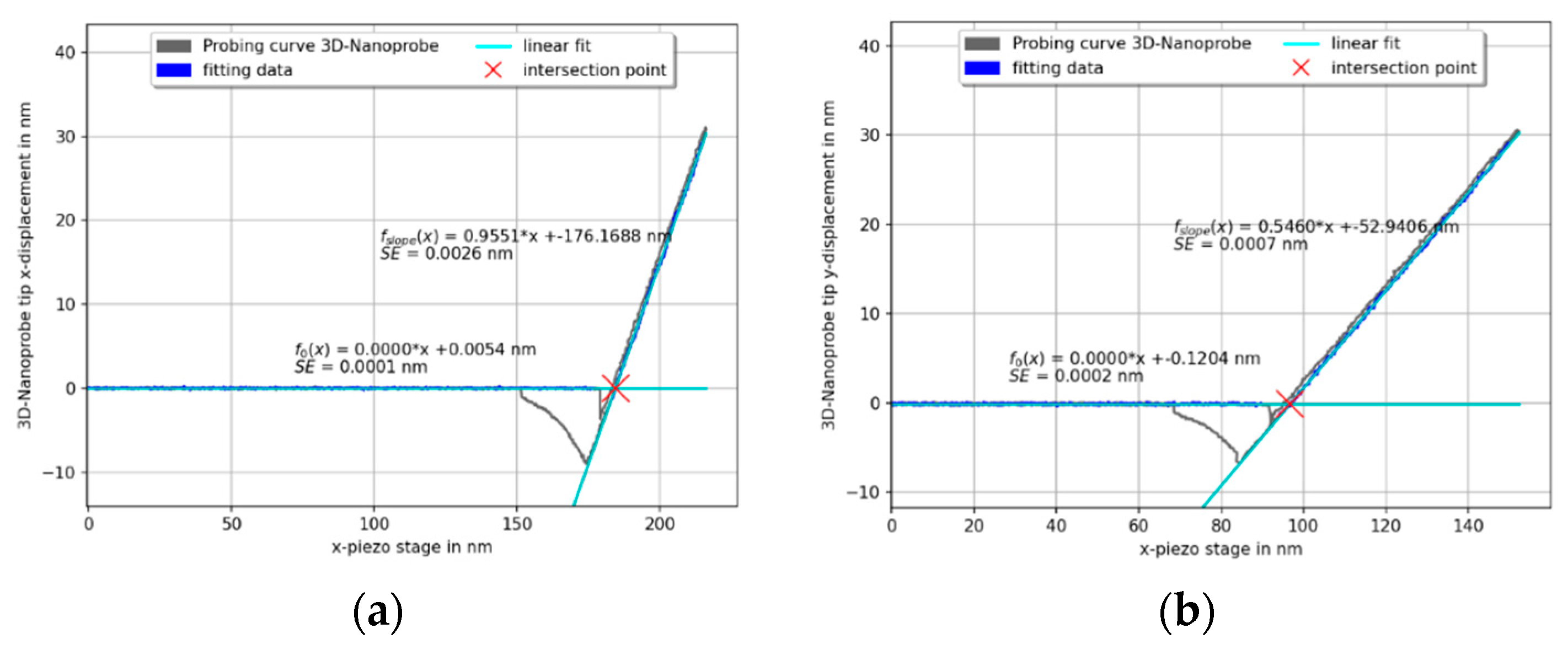
2.2.2. Calibration of the 3D-Nanoprobe
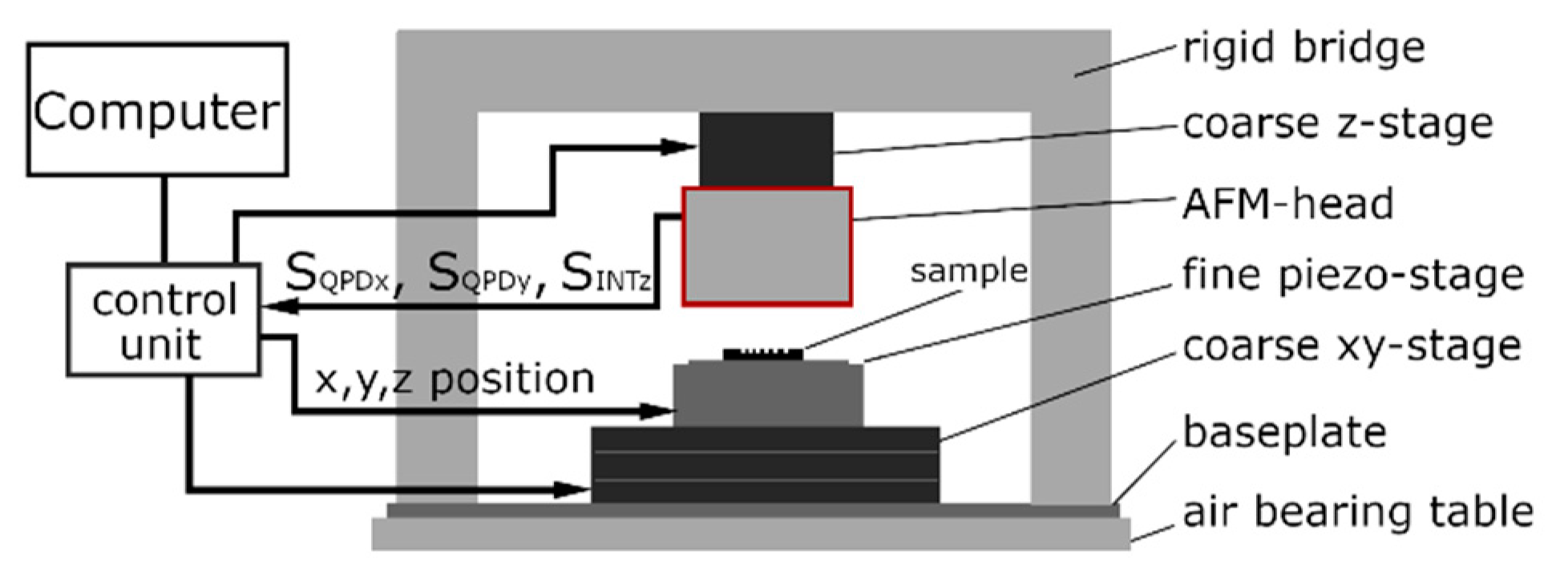
2.3. The 3D-AFM Head
3. Results and Discussion
3.1. 3D-Nanoprobe Stiffness Calibration
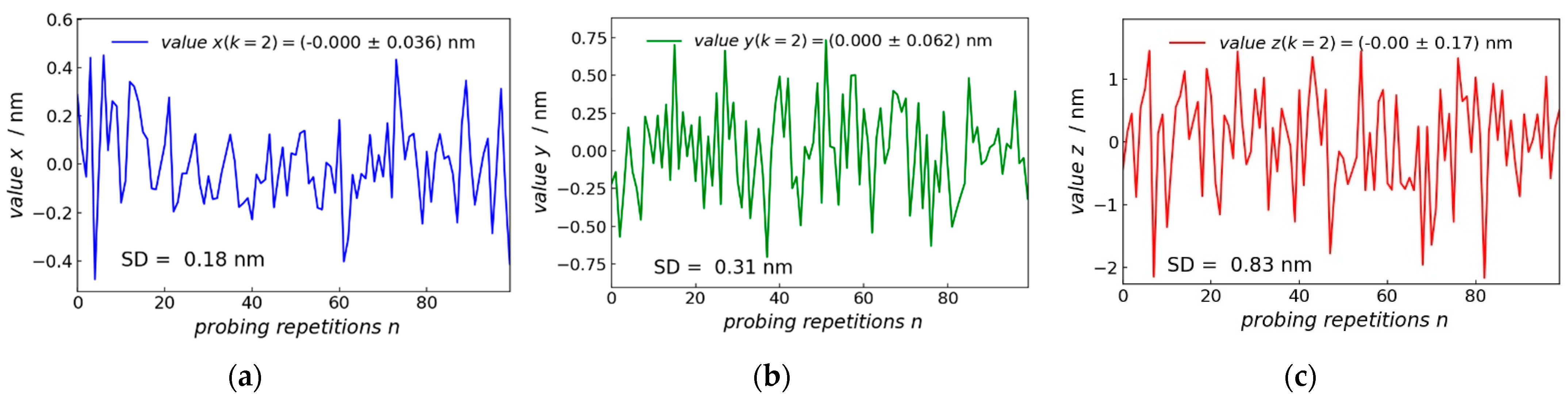
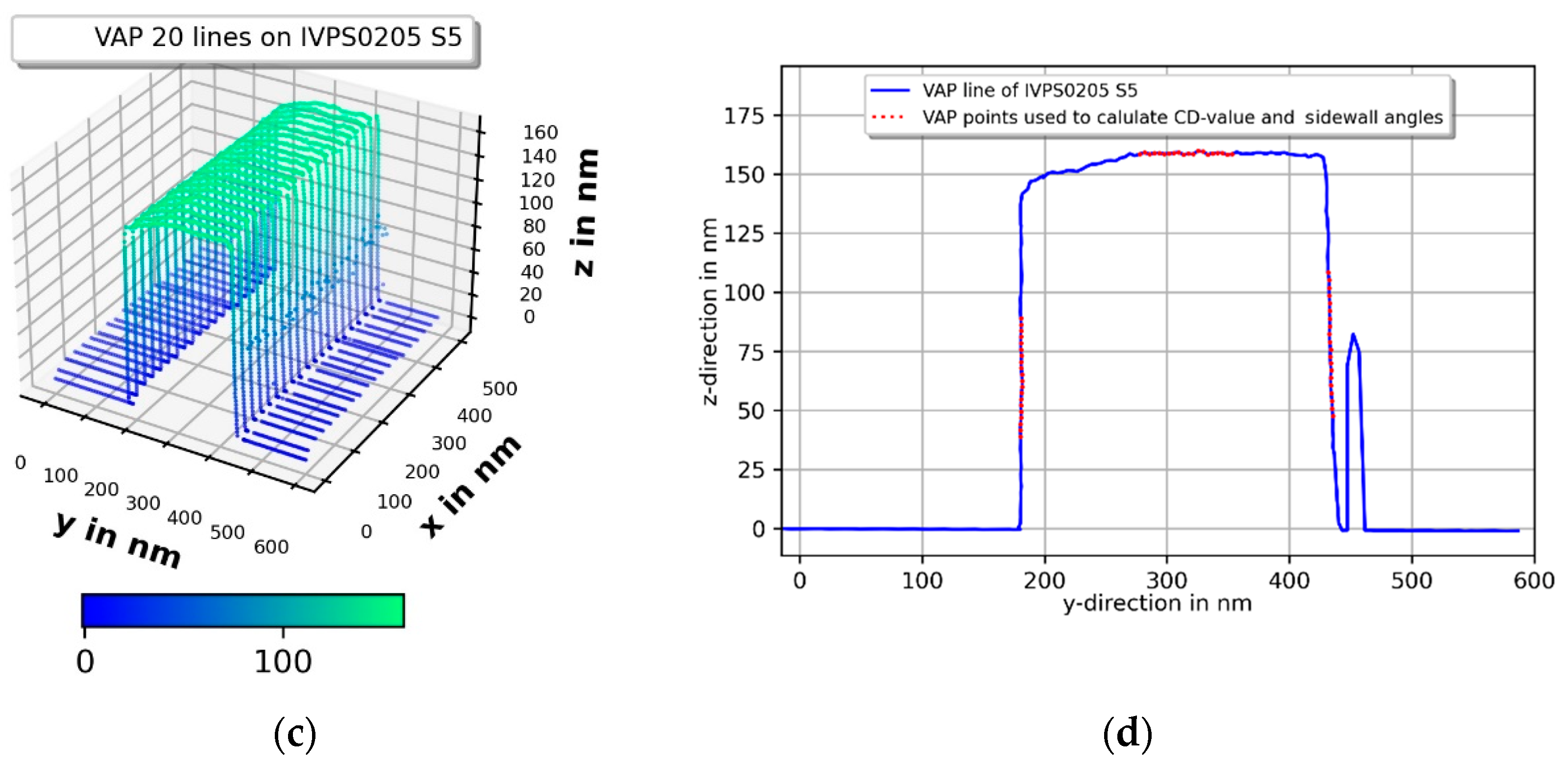
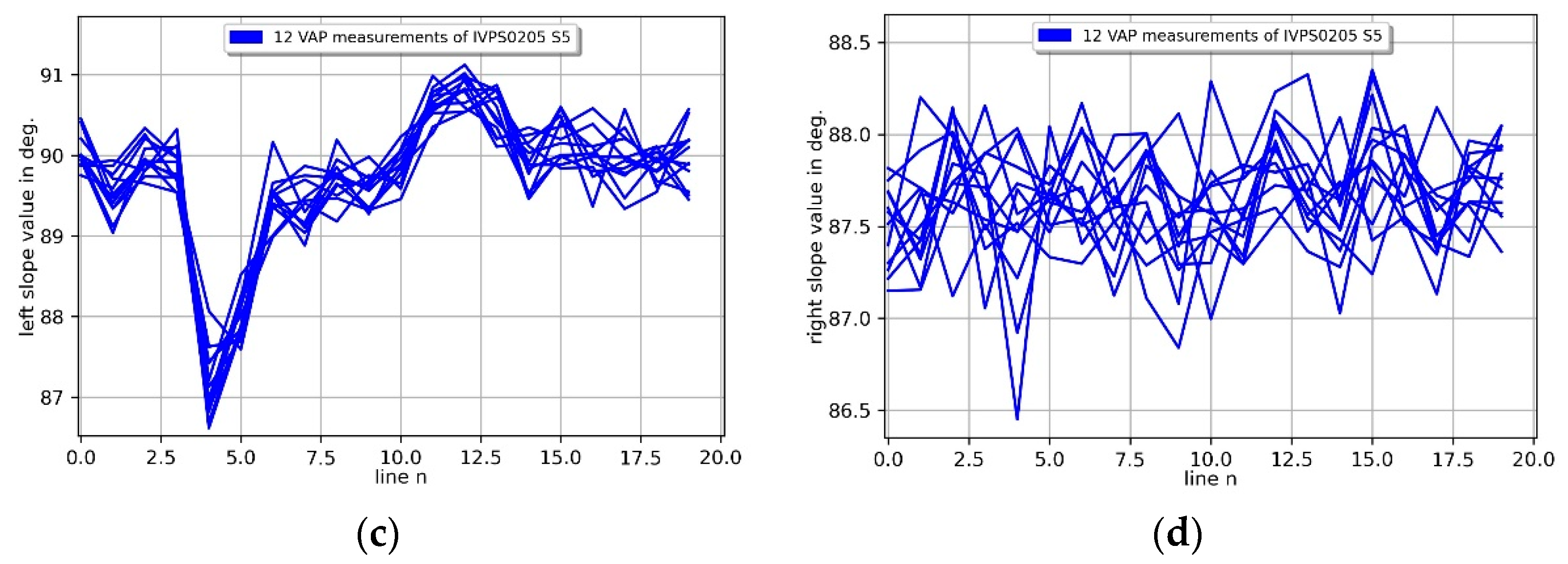
3.2. Probing Repeatability
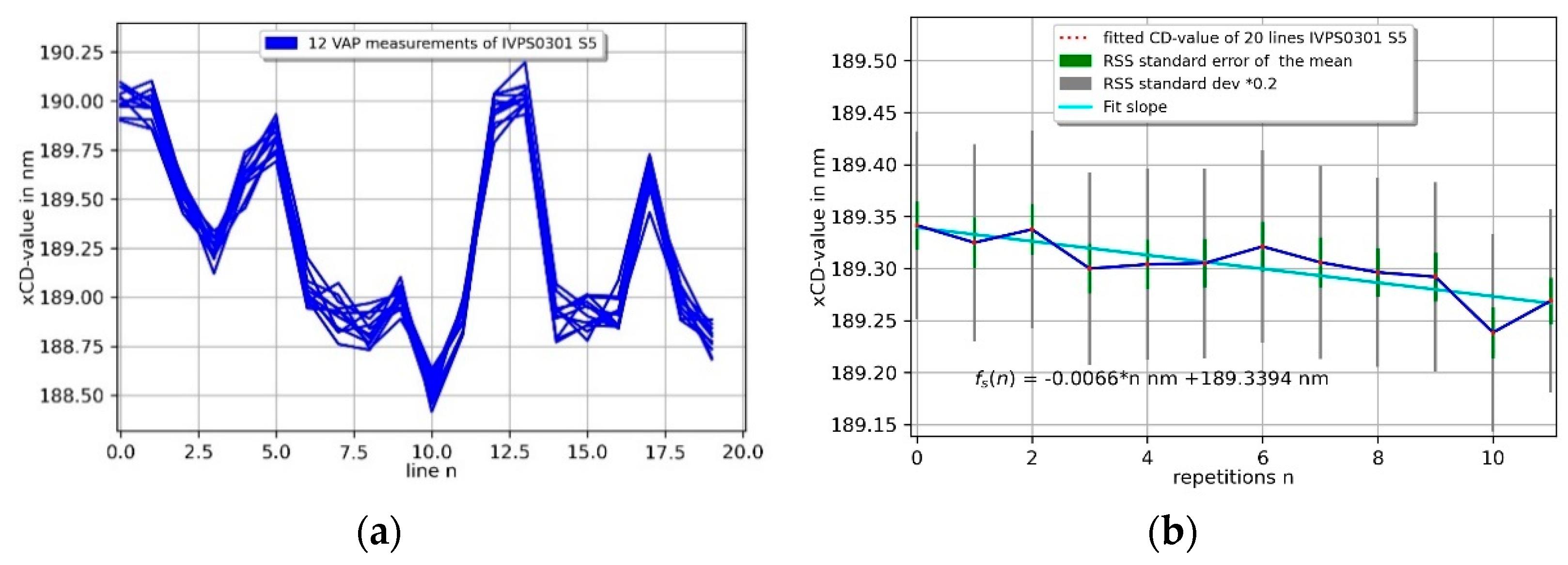
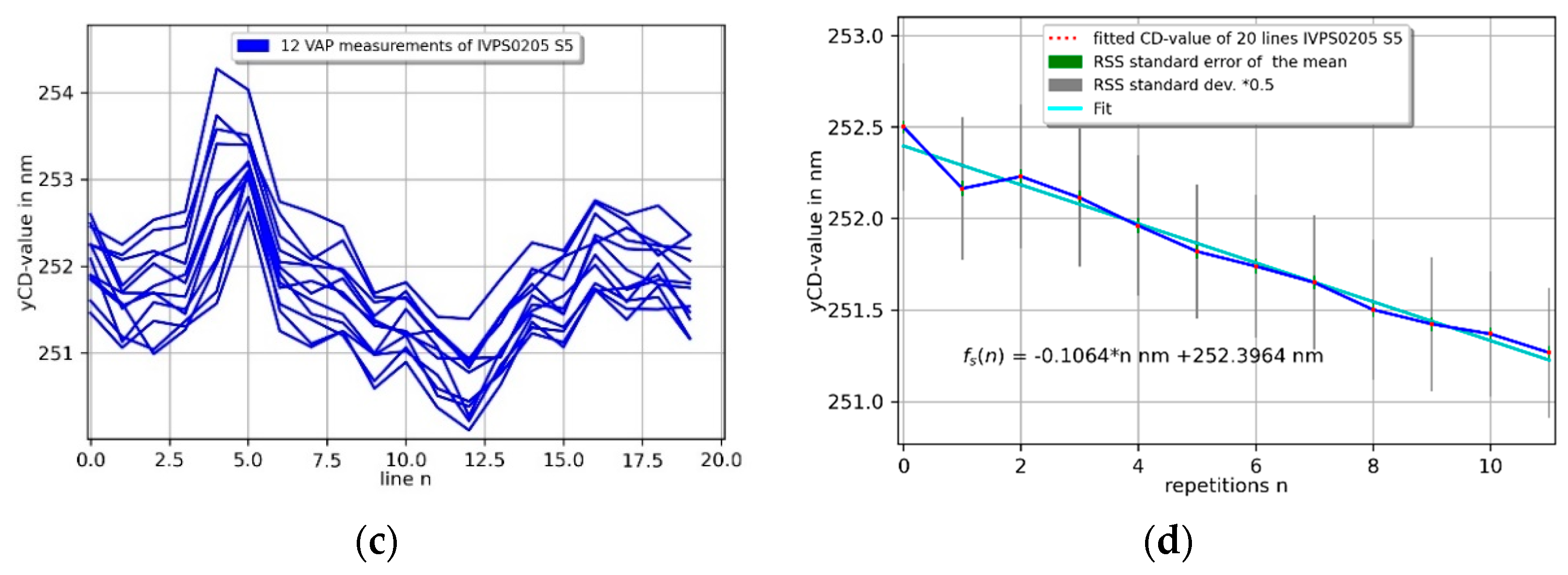
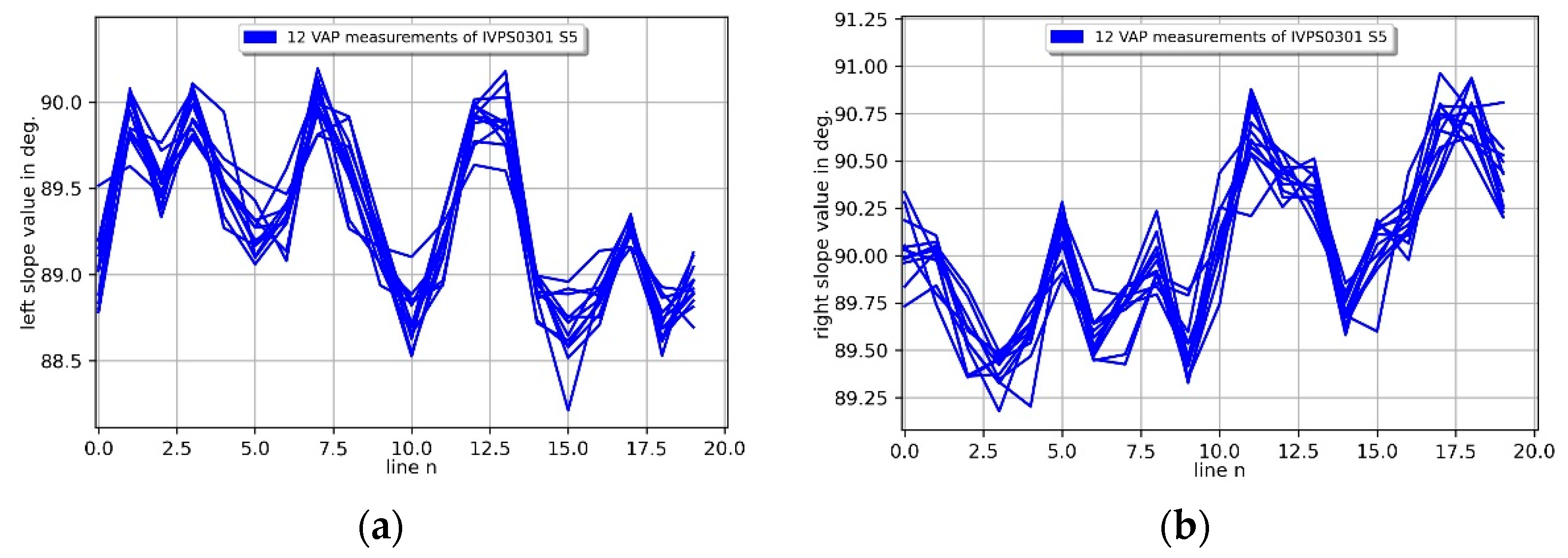
3.3. Repeatability Measurements
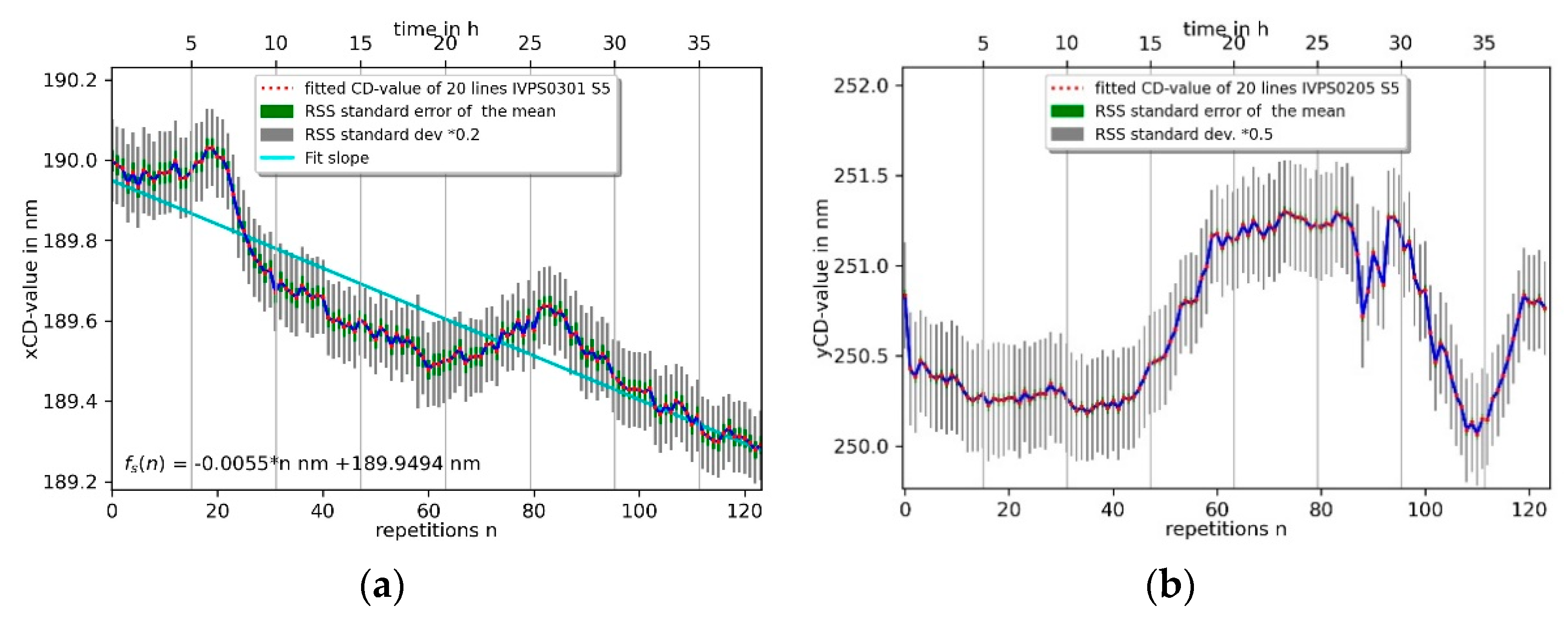
3.4. Stability Measurements
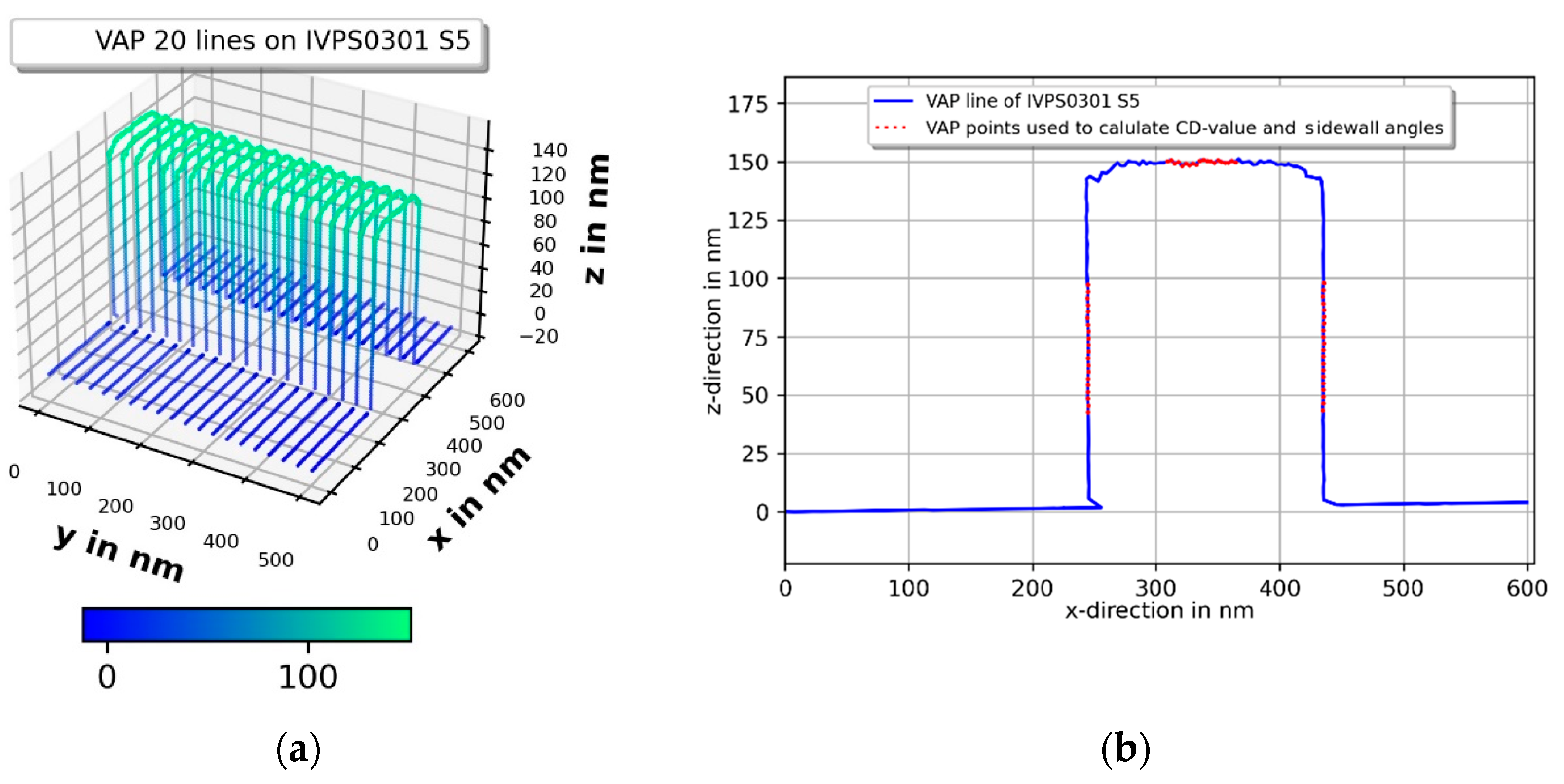
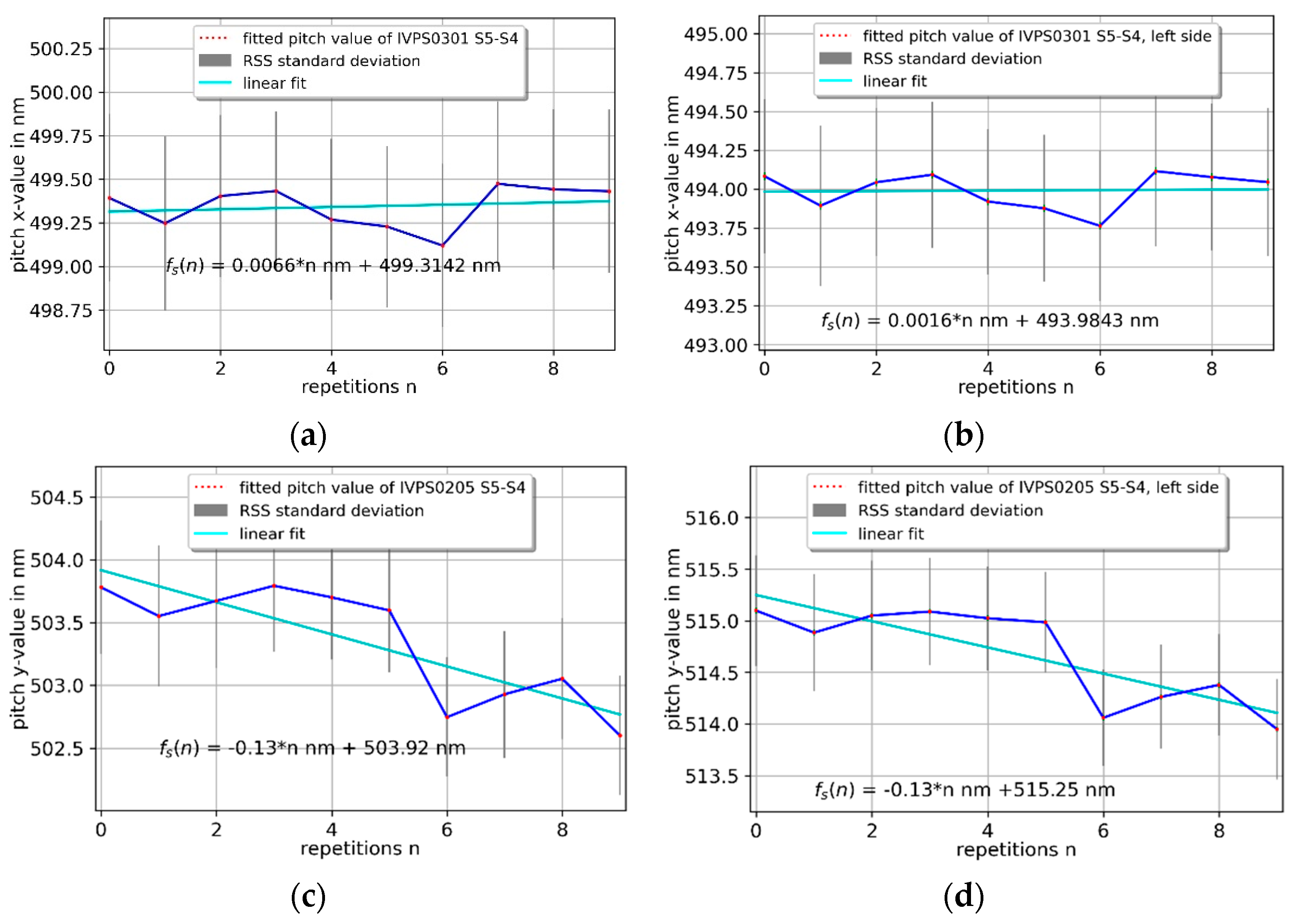
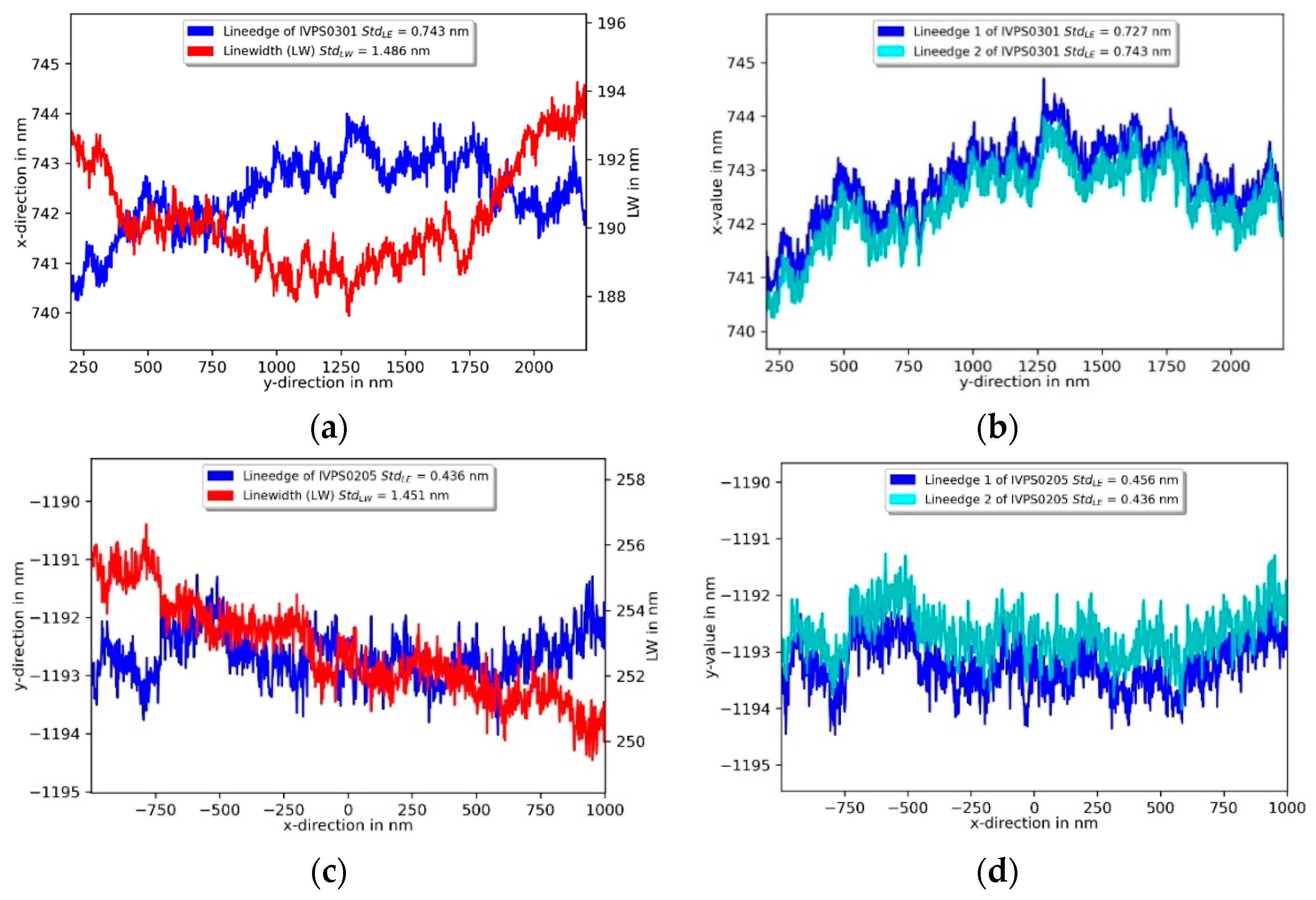
3.5. Pitch and Roughness Measurements
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Disclaimer
References
- Binning, G.; Quate, C.F.; Gerber, C. Atomic Force Microscope. Phys. Rev. Lett. 1986, 56, 930. [Google Scholar] [CrossRef] [Green Version]
- Danzebrink, H.-U.; Koenders, L.; Wilkening, G.; Yacoot, A.; Kunzmann, H. Advances in Scanning Force Microscopy for Dimensional Metrology. CIRP Ann. Manuf. Technol. 2006, 55, 841–878. [Google Scholar] [CrossRef]
- Yacoot, A.; Koenders, L. Aspects of scanning force microscope probes and their effects on dimensional measurement. J. Phys. D Appl. Phys. 2008, 41, 103001. [Google Scholar] [CrossRef]
- Giessibl, F.J. AFM’s path to atomic resolution. Mater. Today 2005, 8, 32–41. [Google Scholar] [CrossRef]
- Dixson, R.; Orji, N.; Misumi, I.; Dai, G. Spatial dimensions in atomic force microscopy: Instruments, effects, and measurements. Ultramicroscopy 2018, 194, 199–214. [Google Scholar] [CrossRef]
- Ryosuke, K.; Misumi, I.; Hirai, A.; Kinoshita, K.; Gonda, S. Development of a metrological atomic force microscope with a tip-tilting mechanism for 3D nanometrology. Meas. Sci. Technol. 2018, 29, 075005. [Google Scholar]
- Matrin, Y.; Wickramasinghe, H.K. Method for imaging sidewalls by atomic force microscopy. Appl. Phys. Lett. 1994, 64, 2498. [Google Scholar]
- Dai, G.; Häßler-Grohne, W.; Hueser, D.; Wolff, H.; Flügge, J.; Bosse, H. New developments at Physikalisch Technische Bundesanstalt in three- dimensional atomic force microscopy with tapping and torsion atomic force microscopy mode and vector approach probing strategy. J. Micro/Nanolithography MEMS MOEMS 2012, 11, 011004. [Google Scholar] [CrossRef]
- Häßler-Grohne, W.; Hüser, D.; Dai, G.; Köning, R.; Bosse, H. Investigation of the cantilever response of non-contact atomic force microscopy for topography measurements in all three dimensions. Meas. Sci. Technol. 2011, 22, 094006. [Google Scholar] [CrossRef]
- Thiesler, J.; Tutsch, R.; Karsten, F.; Dai, G. True 3D-AFM sensor for nanometrology. Meas. Sci. Technol. 2020, 31, 074012. [Google Scholar] [CrossRef]
- Balzer, F.G.; Hausotte, T.; Dorozhovets, N.; Manske, E.; Jäger, G. Tactile 3D microprobe system with exchangeable styli. Meas. Sci. Technol. 2011, 22, 094018. [Google Scholar] [CrossRef]
- Koops, R.; Fokkema, V. An approach towards 3D sensitive AFM cantilevers. Meas. Sci. Technol. 2013, 25, 044001. [Google Scholar] [CrossRef]
- Zhang, R.; Wu, S.; Lu, L.; Lu, N.-H.; Fu, X.; Gao, S.-T.; Hu, X.-D. CD probe with tailored cantilever for 3D-AFM measurement. Meas. Sci. Technol. 2018, 29, 125011. [Google Scholar]
- Jäger, G.; Manske, E.; Hausotte, T.; Müller, A.; Balzer, F. Nanopositioning and nanomeasuring machine NPMM-200—A new powerful tool for large-range micro- and nanotechnology. Surf. Topogr. Metrol. Prop. 2016, 4, 034004. [Google Scholar] [CrossRef]
- Akhtar, I.; Rehman, M.A.; Choi, W.; Kumar, S.; Lee, N.; Cho, S.-J.; Park, H.-H.; Park, K.-H.; Seo, Y. Three-dimensional atomic force microscopy for ultra-high-aspect-ratio imaging. Appl. Surf. Sci. 2019, 469, 582–592. [Google Scholar] [CrossRef]
- Akhtar, I.; Rehman, M.A.; Choi, W.; Bae, J.; Seo, Y. Quartz tuning fork based three-dimensional topography imaging for sidewall with blind features. Ultramicroscopy 2020, 210, 112916. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Wu, S.; Liu, L.; Fu, X.; Gao, S.T.; Hu, X.D. Adaptive-angle scanning method for 3D measurement with atomic force microscopy. Meas. Sci. Technol. 2019, 30, 095005. [Google Scholar] [CrossRef]
- Cordes, A.; Bunday, B.D.; Cottrell, E. Sidewall slope sensitivity of critical dimension atomic force microscopy. J. Micro/Nanolithography MEMS MOEMS 2012, 11, 011011. [Google Scholar] [CrossRef]
- Choi, J.; Park, B.C.; Ahn, S.J.; Kim, D.-H.; Lyou, J.; Dixson, R.G.; Orji, N.G.; Fu, J.; Vorburger, T.V. Evaluation of carbon nanotube probes in critical dimension atomic force microscopes. J. Micro/Nanolithography MEMS MOEMS 2016, 15, 034005. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Watanabe, M.; Baba, S.; Nakata, T.; Morimoto, T.; Sekino, S.; Itoh, H. Atomic force microscope method for sidewall measurement through carbon nanotube probe deformation. Correction J. Micro/Nanolithography MEMS MOEMS 2012, 11, 011009. [Google Scholar] [CrossRef]
- Strahlendorff, T.; Dai, G.; Bergmann, D.; Tutsch, R. Tip wear and tip breakage in high-speed atomic force microscopes. Ultramicroscopy 2019, 201, 28–37. [Google Scholar] [CrossRef] [PubMed]
- Dai, G.; Zhu, F.; Heidelmann, M.; Fritz, G.; Bayer, T.; Kalt, S.; Fluegge, J. Development and characterisation of a new line width reference material. Meas. Sci. Technol. 2015, 26, 115006. [Google Scholar] [CrossRef]
- Li, Z.; Brand, U. Towards Quantitative Characterisation of the Small Force Transducer Used in Nanoindentation Instruments. Modern Instrum. 2013, 2, 61–67. [Google Scholar] [CrossRef] [Green Version]
- Foucher, J.; Rana, N.; Dezauzier, C. 3D-AFM enhancement for CD metrology dedicated to lithography sub-28-nm node requirements. In Metrology, Inspection, and Process Control for Microlithography XXIV; Raymond, C.J., Ed.; SPIE: San Jose, CA, USA, 2010. [Google Scholar]
- Watanabe, M.; Baba, S.; Nakata, T.; Kurenuma, T.; Kuroda, H.; Hiroki, T. An advanced AFM sensor for high-aspect ratio pattern profile in-line measurement. In Metrology, Inspection, and Process Control for Microlithography XX; Archie, C.N., Ed.; SPIE: San Jose, CA, USA, 2006. [Google Scholar] [CrossRef]
- Ukraintsev, V.; Banke, B. Review of reference metrology for nanotechnology: Significance, challenges, and solutions. J. Micro/Nanolithogr. MEMS MOEMS 2012, 11, 011010-1–011010-9. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3D-Nanoprobe | Measured Stiffness in N/m (k = 2) | FEM Modelled Stiffness in N/m |
|---|---|---|
| A 1 | ||
| B 2 | ||
| C 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thiesler, J.; Ahbe, T.; Tutsch, R.; Dai, G. True 3D Nanometrology: 3D-Probing with a Cantilever-Based Sensor. Sensors 2022, 22, 314. https://doi.org/10.3390/s22010314
Thiesler J, Ahbe T, Tutsch R, Dai G. True 3D Nanometrology: 3D-Probing with a Cantilever-Based Sensor. Sensors. 2022; 22(1):314. https://doi.org/10.3390/s22010314
Chicago/Turabian StyleThiesler, Jan, Thomas Ahbe, Rainer Tutsch, and Gaoliang Dai. 2022. "True 3D Nanometrology: 3D-Probing with a Cantilever-Based Sensor" Sensors 22, no. 1: 314. https://doi.org/10.3390/s22010314
APA StyleThiesler, J., Ahbe, T., Tutsch, R., & Dai, G. (2022). True 3D Nanometrology: 3D-Probing with a Cantilever-Based Sensor. Sensors, 22(1), 314. https://doi.org/10.3390/s22010314