
Fault Detection of Planetary Gears Based on Signal Space Constellations

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
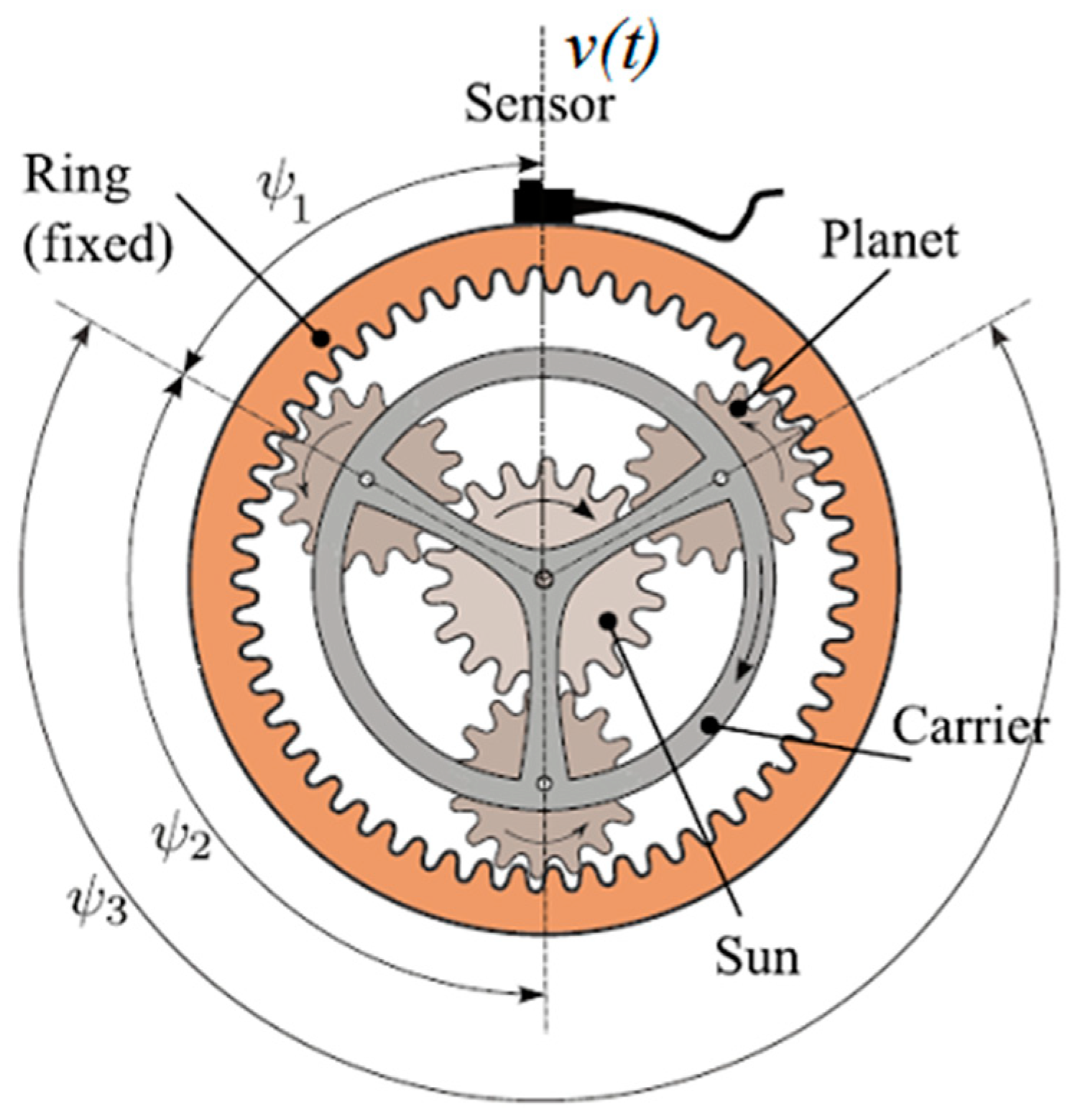
- Ring: it is fixed and contains ZR teeth. Hence the rotation frequency is fR = 0.
- Sun: input component (ZS teeth). Rotation frequency fS.
- Planets: ZP teeth each planet. Rotation frequency fP.
- Carrier: output component. Rotation frequency fC.
2.1. Modeling of the Vibration Signal
2.1.1. Transmission Paths of the Vibration Signal
- 1
- Planet–ring mesh point 🡪 ring 🡪 transducer. Defined by a modulation function .
- 2
- Planet–sun mesh point 🡪 planet 🡪 ring 🡪 transducer. Defined by a modulation function .
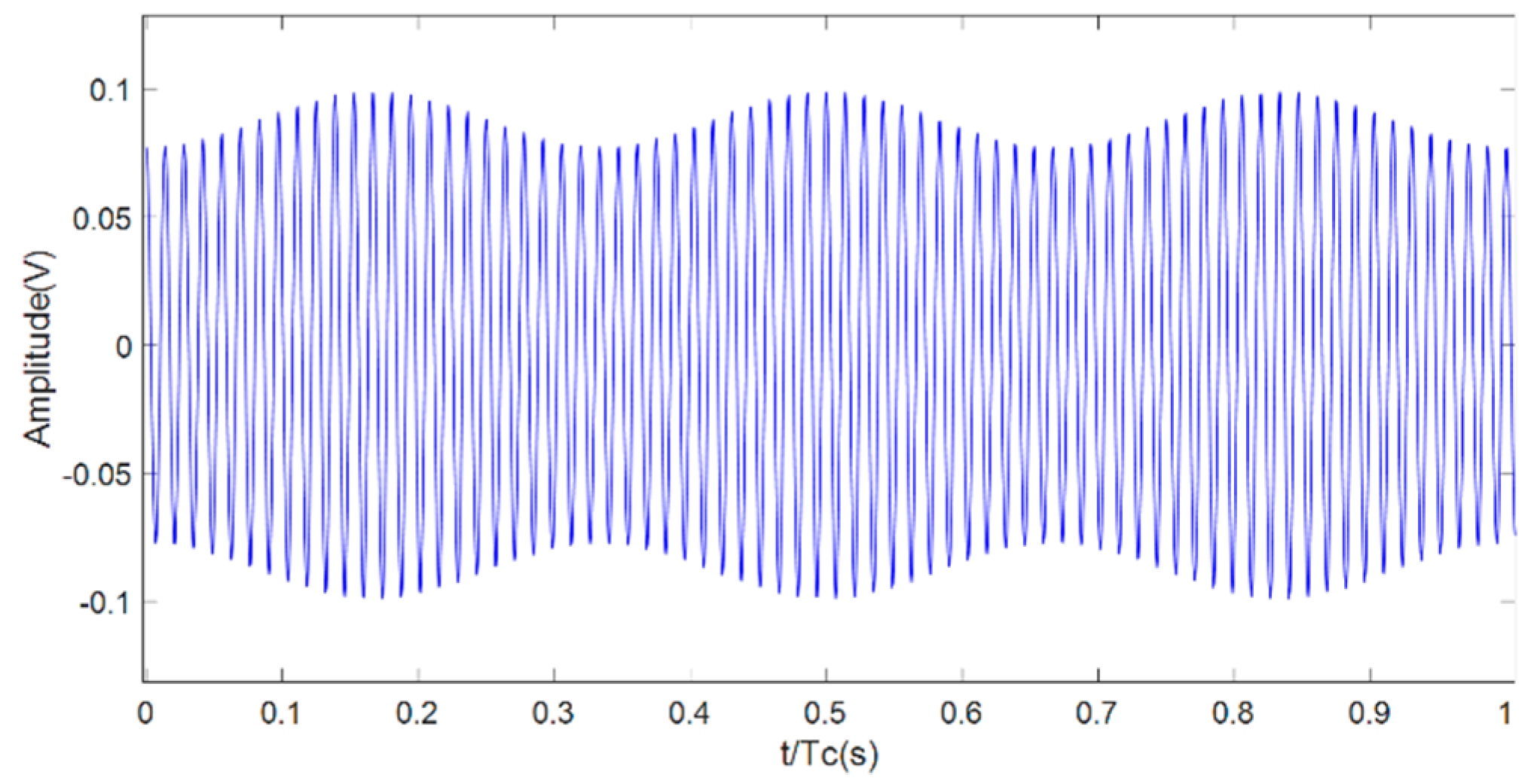
2.1.2. Vibration Signal
- Group A: PGs with equally-spaced planet gears and in-phase gear meshing processes (; ).
- Group B: PGs with equally-spaced planet gears and out-of-phase meshing processes (; ).
- Group C: PGs with unequally-spaced planet gears and in-phase meshing processes (; ).
- Group D: PGs with unequally-spaced planet gears and out-of-phase meshing processes (; ).
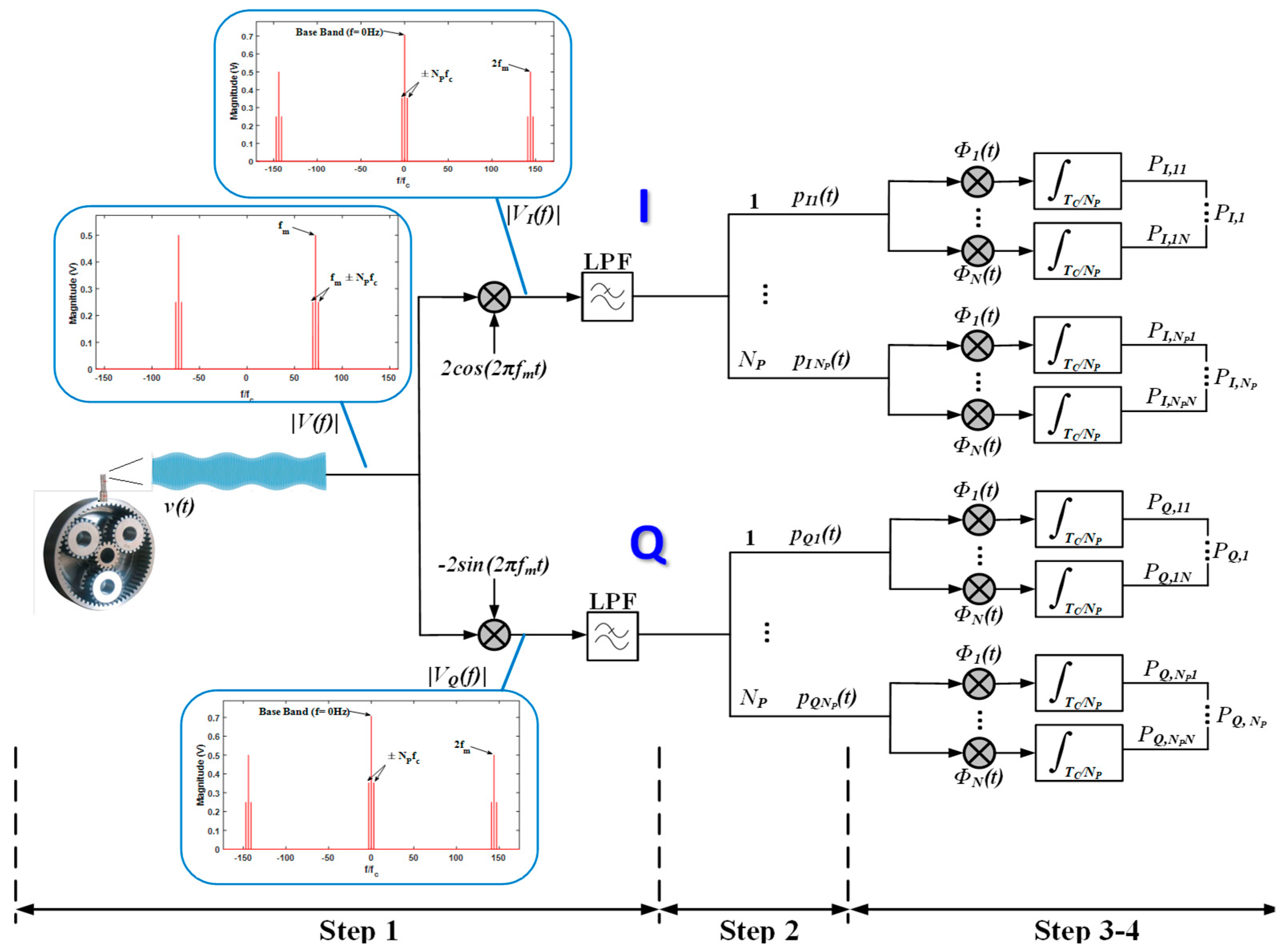
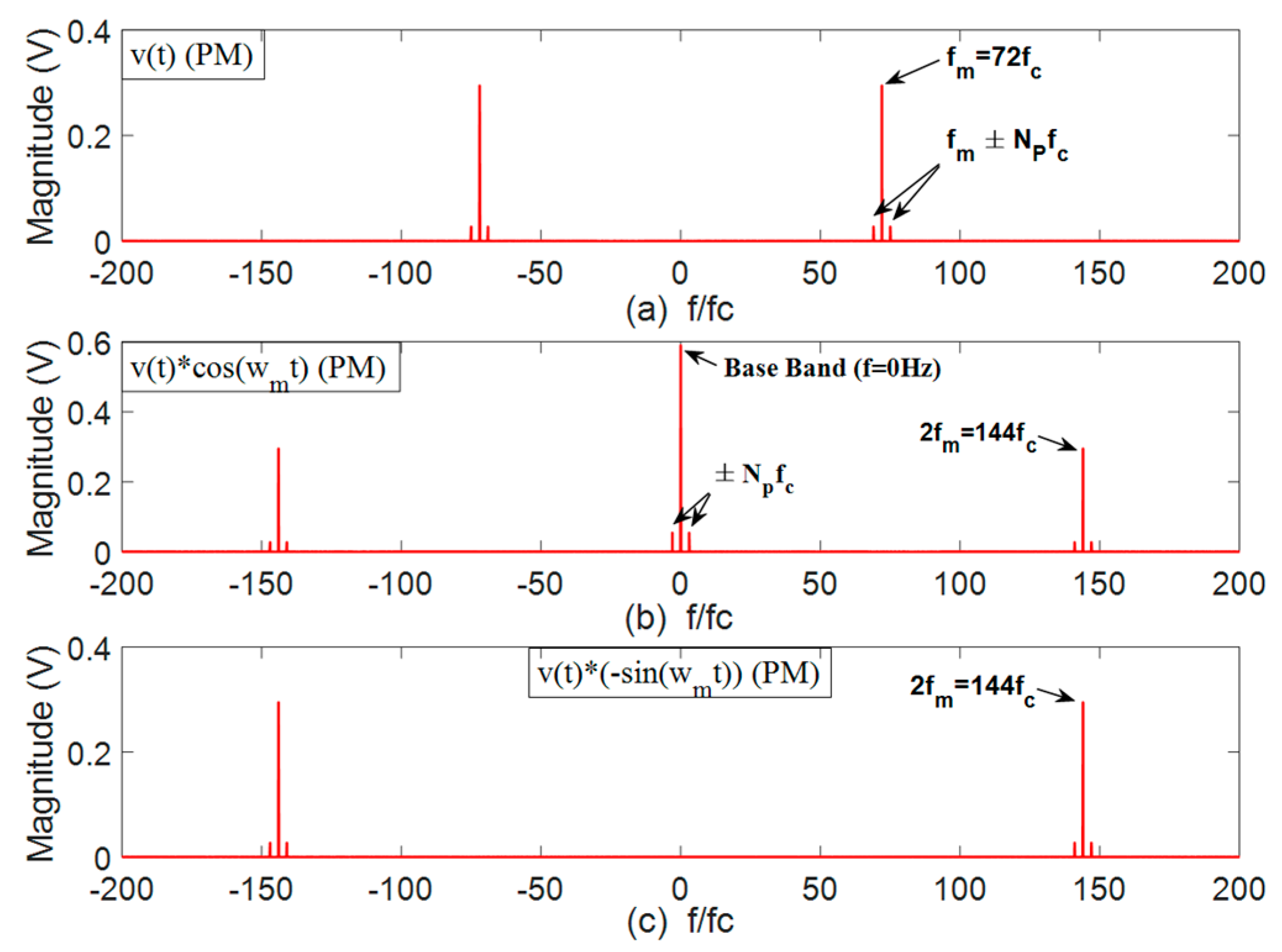
2.2. Proposed Signal Processing Method
- 1
- High frequency component at gear mesh frequency (). In this paper the value of is 432 Hz (see [22]).
- 2
- Low frequency components corresponding to the transmission path envelope () or faults at ring (), sun (), and planet () gears.
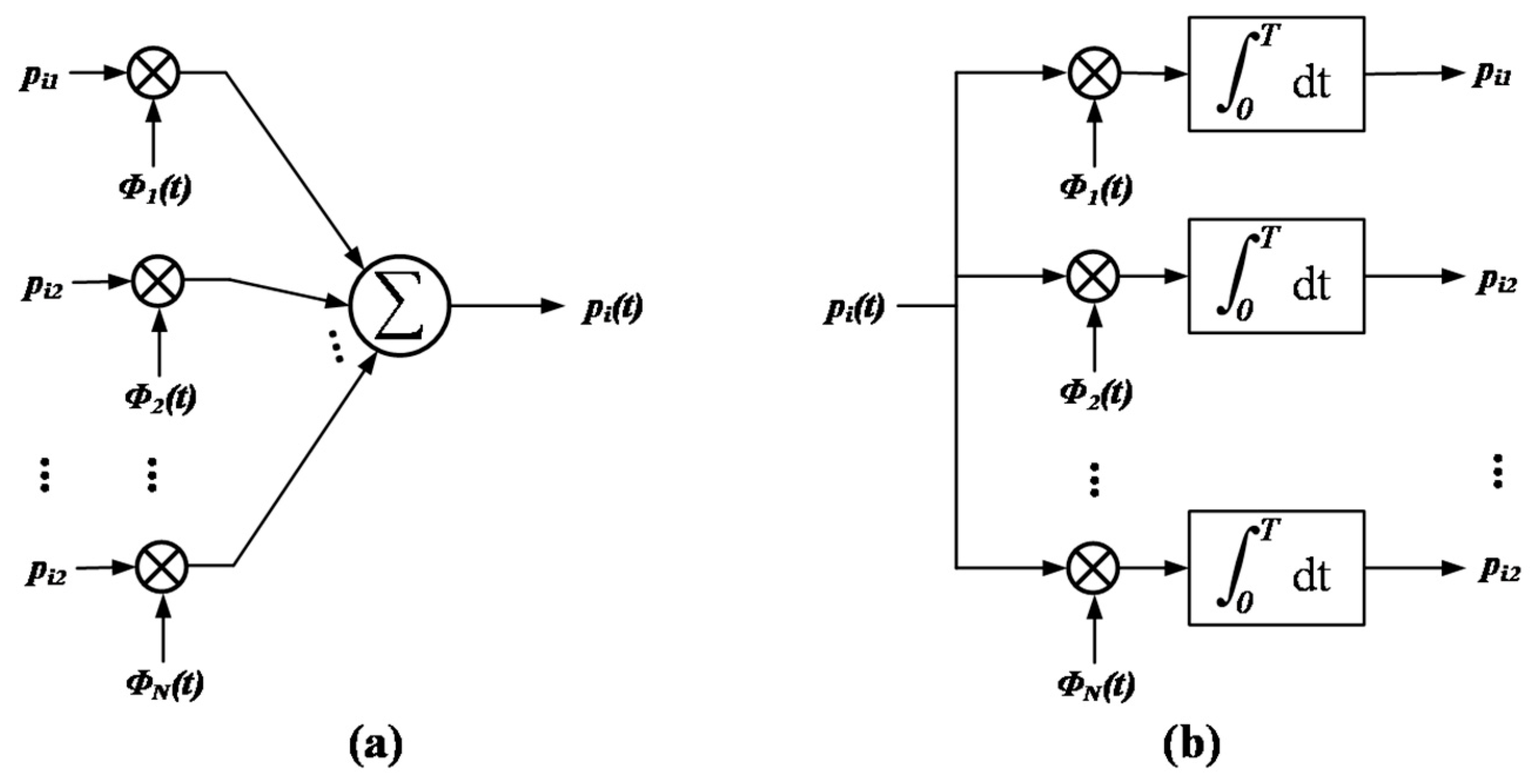
- Given the elements of the vector as input, the scheme of Figure 5a can be used to generate the signal .
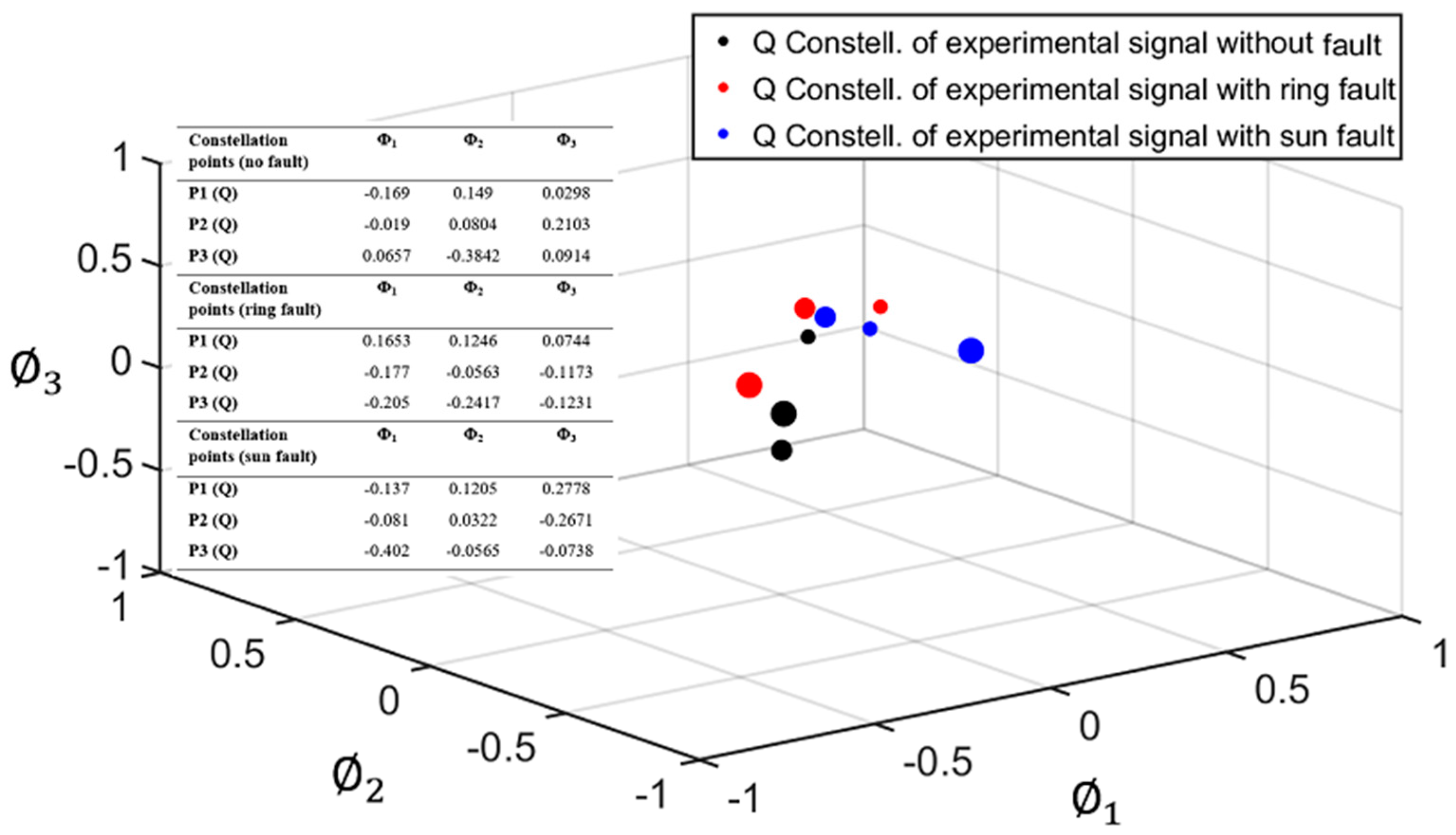
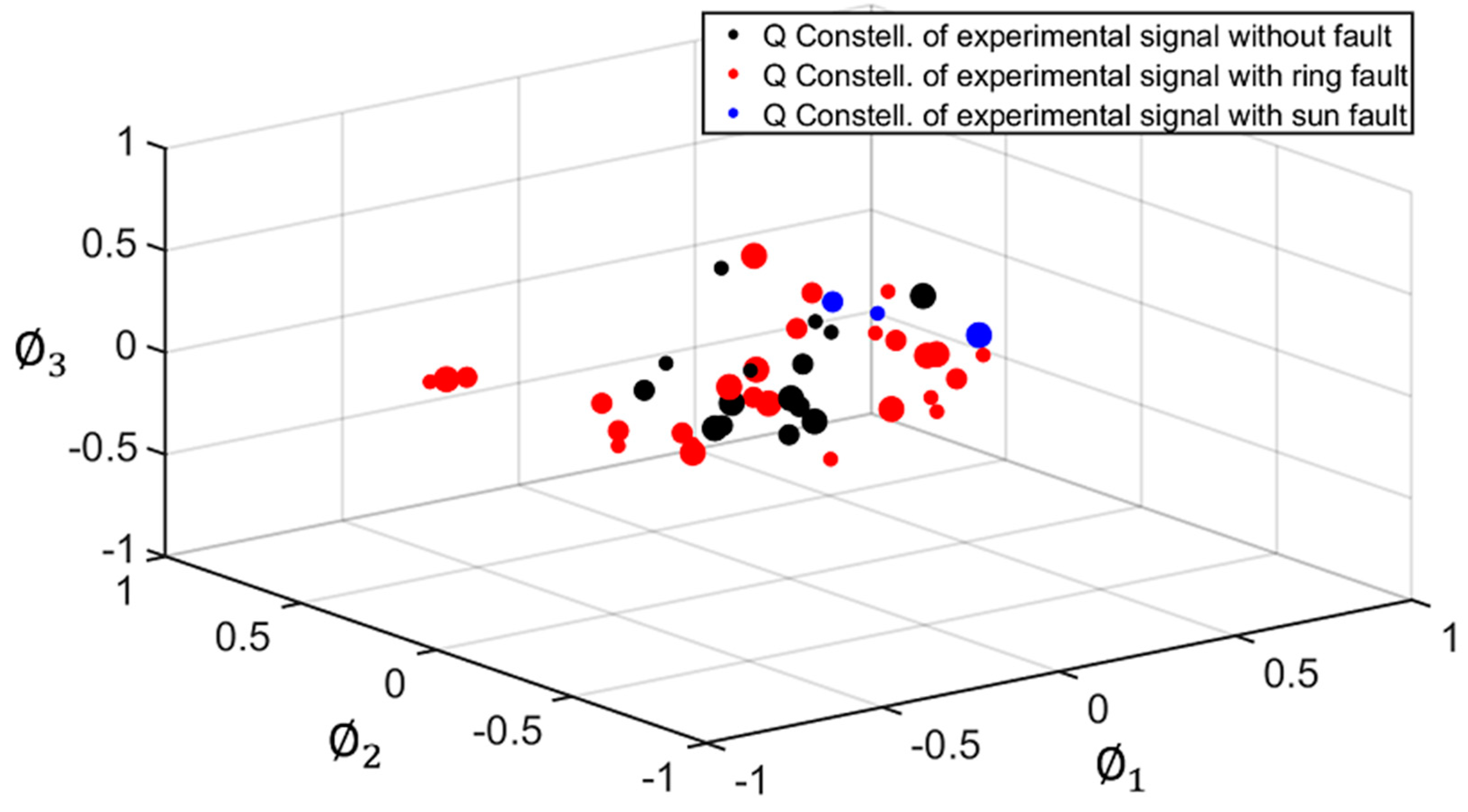
- In the same way, given the signal , as input, the coefficients , , …, can be calculated following the scheme of Figure 5b whose geometric representation is known as constellation.

3. Results
4. Discussion
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dagci, O.H.; Peng, H.; Grizzle, J.W. Hybrid Electric Powertrain Design Methodology With Planetary Gear Sets for Performance and Fuel Economy. IEEE Access 2018, 6, 9585–9602. [Google Scholar] [CrossRef]
- Amri, H.; Feil, R.; Hajek, M.; Weigand, M. Possibilities and difficulties for rotorcraft using variable transmission drive trains. CEAS Aeronaut. J. 2016, 7, 333–344. [Google Scholar] [CrossRef] [Green Version]
- Pengfei, L.; Wang, W. Principle, structure and application of advanced hydrodynamic converted variable speed planetary gear (Vorecon and Windrive) for industrial drive and wind power transmission. In Proceedings of the 2011 International Conference on Fluid Power and Mechatronics, Beijing, China, 17–20 August 2011; pp. 839–843. [Google Scholar]
- Decker, H.J. Crack Detection for Aerospace Quality Spur Gears. April 2002. Available online: https://ntrs.nasa.gov/citations/20020061785 (accessed on 30 December 2021).
- Večeř, P.; Kreidl, M.; Šmíd, R. Condition Indicators for Gearbox Condition Monitoring Systems. Acta Polytech. 2005, 45, 35–43. [Google Scholar] [CrossRef]
- Qu, Y.; He, D.; Yoon, J.; Van Hecke, B.; Bechhoefer, E.; Zhu, J. Gearbox Tooth Cut Fault Diagnostics Using Acoustic Emission and Vibration Sensors—A Comparative Study. Sensors 2014, 14, 1372–1393. [Google Scholar] [CrossRef] [PubMed]
- Elasha, F.; Mba, D. Improving condition indicators for helicopter health and usage monitoring systems. Int. J. Struct. Integr. 2016, 7, 584–595. [Google Scholar] [CrossRef]
- Sharma, V.; Parey, A. A Review of Gear Fault Diagnosis Using Various Condition Indicators. Procedia Eng. 2016, 144, 253–263. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Xiang, J.; Markert, R.; Liang, M. Spectral kurtosis for fault detection, diagnosis and prognostics of rotating machines: A review with applications. Mech. Syst. Signal Process. 2016, 66-67, 679–698. [Google Scholar] [CrossRef]
- Ogundare, A.; Ojolo, S.; Mba, D. Health and Usage Monitoring of Helicopter Gearbox: A Review. In Proceedings of the 2016 International Conference on Industrial Engineering and Operations Management, Detroit, MI, USA, 23–25 September 2016; pp. 403–410. [Google Scholar]
- Wändell, J. Multistage Gearboxes: Vibration Based Quality Control. 2006, p. 27. Available online: https://www.diva-portal.org/smash/get/diva2:10268/FULLTEXT01.pdf (accessed on 30 December 2021).
- Park, J. Signal Processing Techniques Used for Gear Fault Diagnosis; Seoul National University: Seoul, Korea, 2018. [Google Scholar]
- Ma, H.; Pang, X.; Zeng, J.; Wang, Q.; Wen, B. Effects of gear crack propagation paths on vibration responses of the perforated gear system. Mech. Syst. Signal Process. 2015, 62–63, 113–128. [Google Scholar] [CrossRef]
- Shao, Y.; Chen, Z. Dynamic features of planetary gear set with tooth plastic inclination deformation due to tooth root crack. Nonlinear Dyn. 2013, 74, 1253–1266. [Google Scholar] [CrossRef]
- Yang, W.; Jiang, D. An Improved Rigid Multibody Model for the Dynamic Analysis of the Planetary Gearbox in a Wind Turbine. Shock. Vib. 2016, 2016, 9742673. [Google Scholar] [CrossRef]
- Nigam, A.; Jain, S. Modelling and Structural Analysis of Planetary Geared Winch. Int. J. Sci. Res. 2015, 4, 2013–2016. [Google Scholar]
- Parker, R.G. Dynamic Response of a Planetary Gear System using a Finite Element/Contact Mechanics. J. Mech. Des. 2000, 122, 304–310. [Google Scholar] [CrossRef]
- Yang, Z.; Ahmat, M.; Geni, M. Dynamics numerical simulation of planetary gear system for wind turbine gearbox. Indian J. Eng. Mater. Sci. 2015, 22, 71–76. [Google Scholar]
- Vicuña, C.M. Theoretical frequency analysis of vibrations from planetary gearboxes. Forsch. Ingenieurwesen/Eng. Res. 2012, 76, 15–31. [Google Scholar] [CrossRef]
- Lei, Y.; Liu, Z.; Lin, J.; Lu, F. Phenomenological models of vibration signals for condition monitoring and fault diagnosis of epicyclic gearboxes. J. Sound Vib. 2016, 369, 266–281. [Google Scholar] [CrossRef]
- Inalpolat, M.; Kahraman, A. A theoretical and experimental investigation of modulation sidebands of planetary gear sets. J. Sound Vib. 2009, 323, 677–696. [Google Scholar] [CrossRef] [Green Version]
- Parra, J.; Vicuña, C.M. Two methods for modeling vibrations of planetary gearboxes including faults: Comparison and validation. Mech. Syst. Signal Process. 2017, 92, 213–225. [Google Scholar] [CrossRef]
- Haykin, S. Digital Communication Systems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2014; Volume 2, pp. 324–331. [Google Scholar]
- Kundu, P.; Kulkarni, M.S.; Darpe, A.K. A hybrid prognosis approach for life prediction of gears subjected to progressive pitting failure mode. J. Intell. Manuf. 2021, 1–22. [Google Scholar] [CrossRef]
- Sony, S.; Sadhu, A. Identification of progressive damage in structures using time-frequency analysis. In Proceedings of the CSCE General Conference, Montreal, Canada, 12–15 June 2019. [Google Scholar]
- Swati, R.; Wen, L.H.; Elahi, H.; Khan, A.A.; Shad, S. Extended finite element method (XFEM) analysis of fiber reinforced composites for prediction of micro-crack propagation and delaminations in progressive damage: A review. Microsyst. Technol. 2019, 25, 747–763. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Huang, B. Data-Driven Fault Diagnosis for Traction Systems in High-Speed Trains: A Survey, Challenges, and Perspectives. IEEE Trans. Intell. Transp. Syst. 2020, 1–17. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Location | I Constellation | Q Constellation |
|---|---|---|
| Ring gear | dP1 = 1.53 | dP1 = 0.211 |
| dP2 = 1 | dP2 = 0.69 | |
| dP3 = 1.2 | dP3 = 0.148 | |
| Sun gear | dP1 = 0.733 | dP1 = 0.14 |
| dP2 = 1.066 | dP2 = 0.72 | |
| dP3 = 0.779 | dP3 = 0.51 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martincorena-Arraiza, M.; De La Cruz Blas, C.A.; Lopez-Martin, A.; Vicuña, C.M.; Matías, I.R. Fault Detection of Planetary Gears Based on Signal Space Constellations. Sensors 2022, 22, 366. https://doi.org/10.3390/s22010366
Martincorena-Arraiza M, De La Cruz Blas CA, Lopez-Martin A, Vicuña CM, Matías IR. Fault Detection of Planetary Gears Based on Signal Space Constellations. Sensors. 2022; 22(1):366. https://doi.org/10.3390/s22010366
Chicago/Turabian StyleMartincorena-Arraiza, Maite, Carlos A. De La Cruz Blas, Antonio Lopez-Martin, Cristián Molina Vicuña, and Ignacio R. Matías. 2022. "Fault Detection of Planetary Gears Based on Signal Space Constellations" Sensors 22, no. 1: 366. https://doi.org/10.3390/s22010366
APA StyleMartincorena-Arraiza, M., De La Cruz Blas, C. A., Lopez-Martin, A., Vicuña, C. M., & Matías, I. R. (2022). Fault Detection of Planetary Gears Based on Signal Space Constellations. Sensors, 22(1), 366. https://doi.org/10.3390/s22010366