1. Introduction
In daily life, people not only communicate with others according to audio signals, but they also get the meaning of each other according to lip movements in some special scenes. In computer science, speech recognition depends on audio signals, while Visual Speech Recognition (VSR, also called lipreading) is progress that decodes the visual lip signals.
Most lipreading models consist of front-end and back-end modules. Among them, the front-end network pays more attention to the spatial feature extraction of the single frame, while the back-end network is focused more on the temporal dynamics of the whole image sequence. Limited by the structure of our vocal organs, the number of distinguishable pronunciations we could make is finite [
1]. During the lipreading system, in addition to meeting some common challenges in image processing, such as imaging conditions, multiple angles, and low resolution, we also have to face the influence of homophones. Some phonemes and visemes are similar (e.g., the letter “p” and “b”) [
2] and lead to similar lip motions when people say words made up of these letters; for example, the words “back” and “pack” in English, or “dumpling” and “sleep” in Chinese. On the other hand, due to the different habits of each speaker, different speakers will have different lip movements for the same word. Therefore, researchers have been concentrated on obtaining as much dynamic characterization as possible, extracting fine-grained spatial features while also obtaining temporal information of movement sequences.
From the model’s perspective, researchers have been looking for a more efficient network of back-end models for a long time. Chung et al. [
3] used MT-VGG to train the end-to-end lip recognition model and found that the network structure composed entirely of 2D CNN is better than 3D CNN. Stayfylakis et al. [
4] combined 2D and 3D convolution with LSTM. Specifically, a shallow 3D CNN structure is used to obtain short-term temporal features, then 2D convolution is used to extract fine-grained spatial features, and BiLSTM is used to extract temporal features from the obtained feature vectors. It is worth mentioning that the subsequent lipreading models are composed of such front-end networks and back-end networks. The front-end network composed of CNN is mainly used to obtain spatial features and then using a statistical model or RNN to model the features. Later, lipreading was mainly improved by changing the back-end network, such as B. Martinez et al. [
5] used multi-scale TCN.
From the perspective out of the model, researchers have greatly improved by adding additional information without changing the structure of the model. For example, since 2D CNN cannot obtain time information, Chung et al. [
3] stacked consecutive frames and sent them to 2D CNN. Similarly, Hao et al. [
6] integrated the Temporal Shift Module into 2D CNN and shifted the near frames of each frame sequence so that the current frame could obtain the relevant information of the front and rear frames. Stafylakis et al. [
7] introduced word boundaries to provide context information for classifying target words bypassing the boundary vector of words. On the input data, the optical flow data used to describe the instantaneous motion state of the moving object can also reflect the motion information of the lip. In [
8], two-stream I3D is used to receive gray video and optical flow, and it is found that the front-end network composed entirely of 3D CNN can further improve the performance.
In addition, a training method of bimodal lipreading based on the combination of the audio-visual has become popular recently [
9,
10]. In simple terms, these methods take image sequences and speech information as inputs, extract visual and audio features during training, and memorize audio representations by modeling the interrelationships between audio and visual representations. In the inference stage, the visual input extracts the preserved audio representation from the preserved interrelation. Kim et al. [
11] proposed a multi-modal bridging framework containing two modality-specific memories: a source-key memory and target-value memory. This enables it to complement the information of unimodal inputs with the recalled target modal information. Kim et al. [
12] proposed the Multi-head Visual-audio Memory (MVM), composed of multi-head key memories for saving visual features and one value memory for saving audio knowledge. Yang et al. [
13] proposed a feature disentanglement learning strategy with a linguistic module that extracts and transfers knowledge across modalities via cross-modal mutual learning.
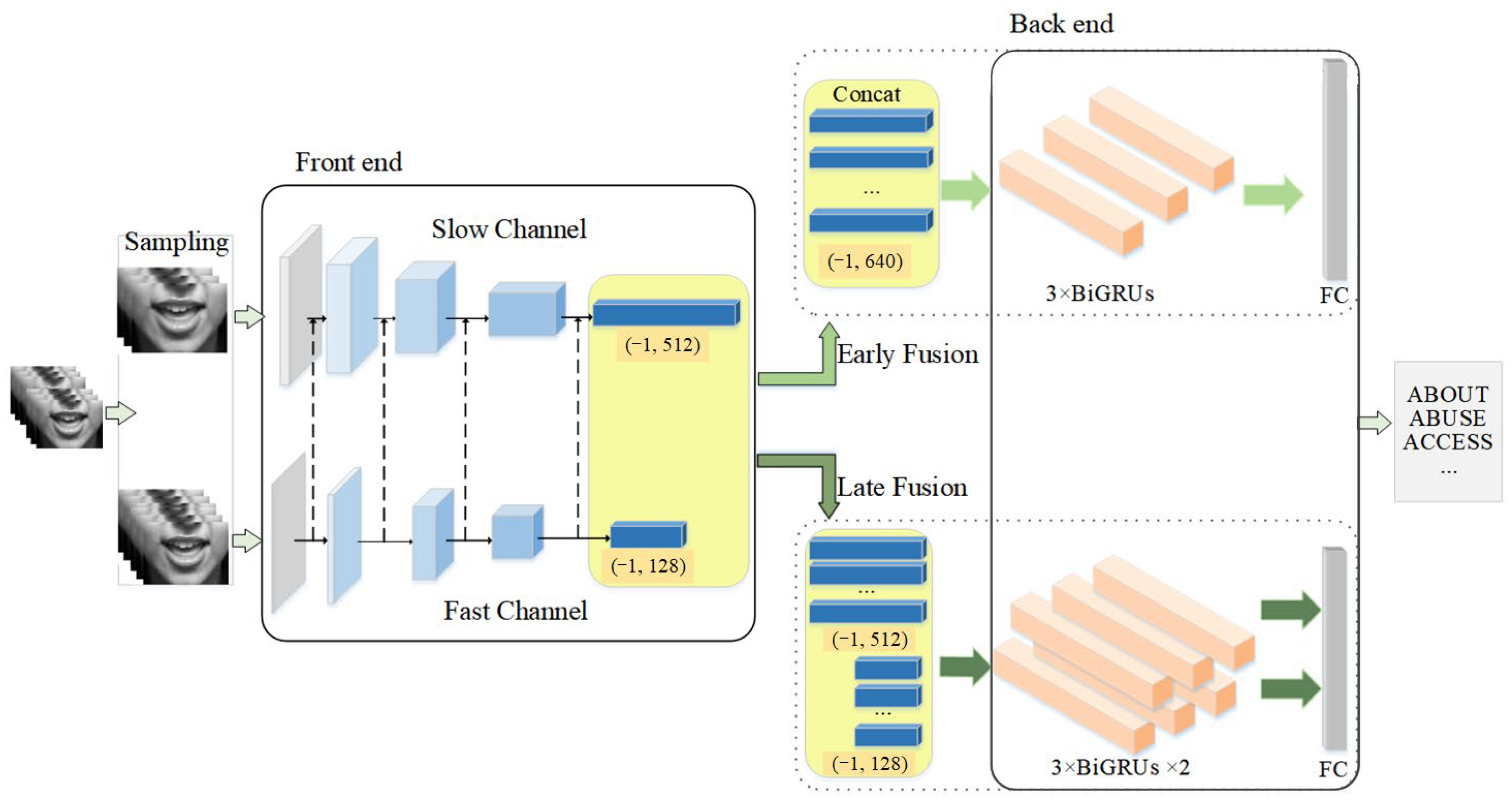
The key point in this paper is to obtain the subtle lip motion to distinguish the similar mouth shape. Under such consideration, we proposed a new dual-stream lipreading model called Lip Slow-Fast (LSF) based on the Slow-Fast Net [
14]. To obtain subtle lip motion features, two streams with different channel capacities are used to extract dynamic features and static features respectively. Compared with action recognition, lipreading is a fine-grained video multi-classification. The action could be inferred from several frames, while the lip motion is smooth and inconspicuous. That is why the performance of the Slow-Fast Net in lipreading is very poor, even far weaker than the baseline. Therefore, based on some existing studies, we discussed the front-end models of different convolutional structures and reconstructed the Slow-Fast Net, which reduces the total parameters and greatly increases the model’s performance. Furthermore, for word-level lipreading, the duration of the target word in each sample is usually less than 1s. Therefore, to better describe the whole sequence, we implemented two sampling methods and further explored their impact on the proposed model. Finally, we explored two different fusion schemes. The early fusion is for the fusion of the feature maps extracted from fast and slow channels and then sequence modeling of the relative dynamic features using Bi-Gated Recurrent Unit (BiGRU). The late fusion is to model the feature maps of two streams respectively and fuse the output results at last.
Our contributions are in four aspects:
Firstly, a new front-end model with two effective CNN streams and a lateral connection is proposed in this paper to capture the relative dynamic features of lip motion.
Secondly, for each component in the front-end model, we explored a more effective convolution structure and achieved an improvement of about 8%.
Thirdly, we verified the impact of sampling methods due to the short duration of word-level lipreading samples on the extraction of lip motion information.
Then, we discussed and analyzed the fusion methods of the two-stream front end model with the back-end model.
At last, we verified our proposed method on LRW [
3] and LRW-1000 [
15] and achieved a new state-of-the-art.
3. Results
The proposed model was trained and evaluated on two VSR benchmarks: the Lip Reading in the Wild (LRW) dataset and the LRW-1000 dataset corpus.
In this section, we first briefly introduced the two datasets we used and presented some implementation details. Next, we conducted detailed ablation experiments of model structures, sampling methods, and fusion methods. Finally, we compared the proposed model with other relative works and made some useful remarks.
3.1. Datasets
LRW is a video clip extracted from the BBC TV broadcast. Each clip has 29 frames of images. It contains more than 1000 speakers and 500 English words.
The LRW-1000 includes 1000 Chinese word classes, as well as clips from TV programs that include more than 2000 speakers. Both datasets have been preassigned for training, validation, and testing. In LRW-1000, the publisher has even cropped the faces. In addition, the speakers in both datasets are diverse in posture, age, and skin color, which is the largest and most challenging lipreading dataset currently recognized.
Table 2 shows the details of LRW and LRW-1000.
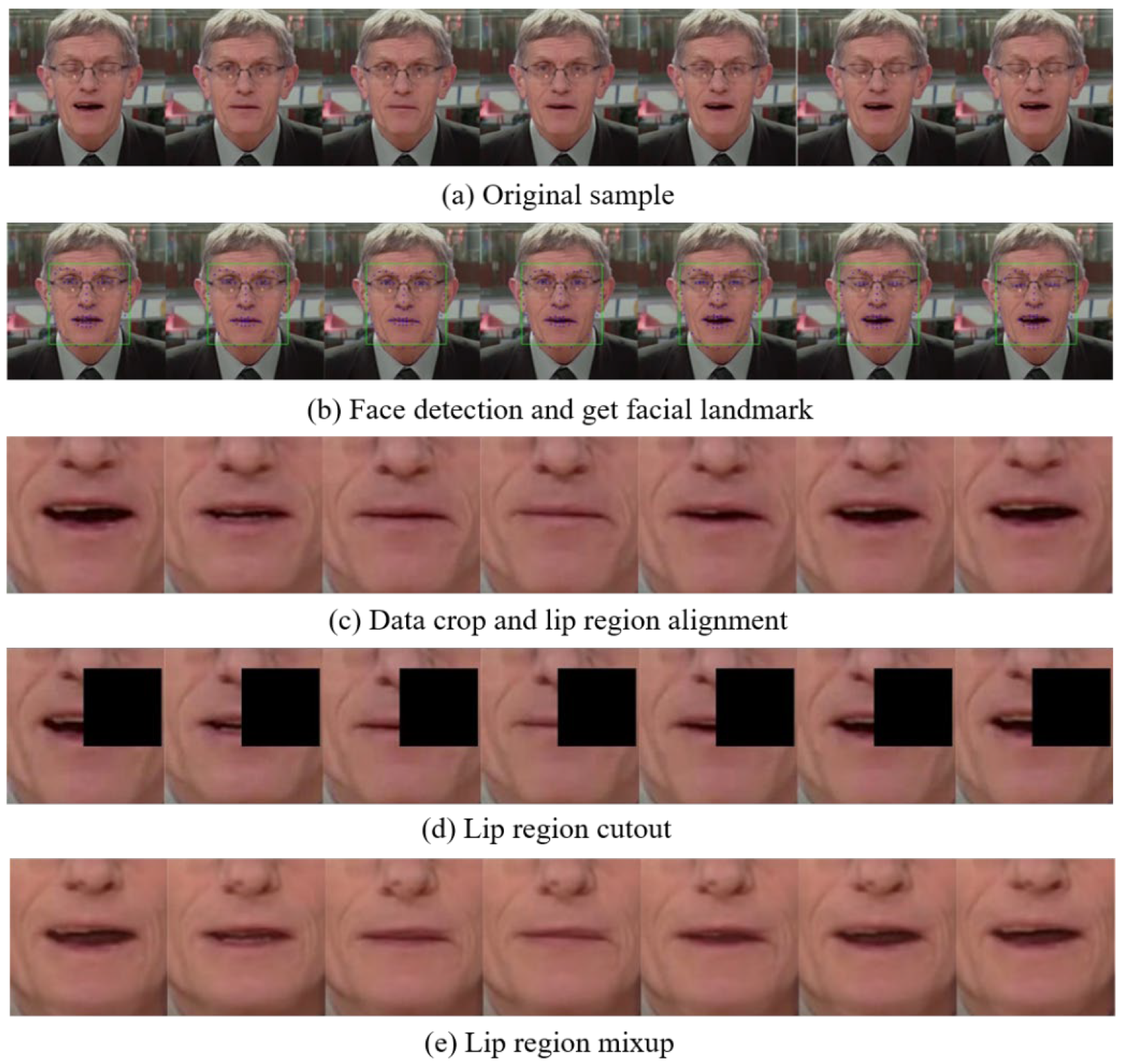
Figure 6 shows the processing of the training data.
3.2. Implementation Details
All the training and inferencing were implemented in the Linux environment with two NVIDIA RTX 2080ti. We use the Adam optimizer with the initial learning rate of 3 × 10−4 and the weight decay of 1 × 10−4. Besides, we use a cosine annealing scheduler with the max epoch of 30.
3.2.1. Data Processing
Zhang et al. [
20] found that face alignment is helpful for face recognition and can improve the accuracy of VSR. Firstly, we used the Dlib toolkit [
21] to get landmarks of each face and then applied Procrustes analysis to gain the affine matrix. Secondly, we used a similarity transformation for all images and center cropped it with a fixed rectangle whose size is 88 × 88 to get the lip region.
In terms of data augment, mix-up and cutout are used to improve the fitting ability of the model. Mix-up is an unconventional data augment method, a simple data enhancement principle independent of data. It constructs a new training sample and its corresponding label by linear interpolation in two samples. For example, given sample
A and sample
B , a new sample can be described as:
where
λ is a random parameter that obeys
β distribution,
, and
is the weighted new sample. With the growing up of
α, the training loss of the network will increase, and its generalization ability will be enhanced. In our experiment,
α was set to 0.2.
Besides, we used the word boundary introduced by Stafylakis et al. [
7] in the data processing to obtain context information. During training, the word boundary will concatenate with the feature vector exacted by the front-end and then input to the back-end to sequence modeling.
3.2.2. Training Details
We introduced the label smooth to reduce over-fitting and improve the model generalization.
The label being smooth reduces the weight of the category of the real sample label in calculating the loss function and finally suppresses the over-fitting effect. Traditional cross-entropy loss is computed as:
where
K is the number of classes,
is the prediction probability that sample
i belongs to category
c.
is a symbolic function if the true category of sample
i is equal to
c,
= 1, otherwise
= 0.
After using the label smooth, the loss function is changed as:
where
ε is a small number and was set to 0.1 in our experiment. Finally, the model makes the network have a stronger generalization ability by suppressing the output difference between positive and negative samples.
3.3. Ablation Experiment
We evaluated the LRW dataset according to the above experimental settings.
3.3.1. The Convolution Structure of Front-End
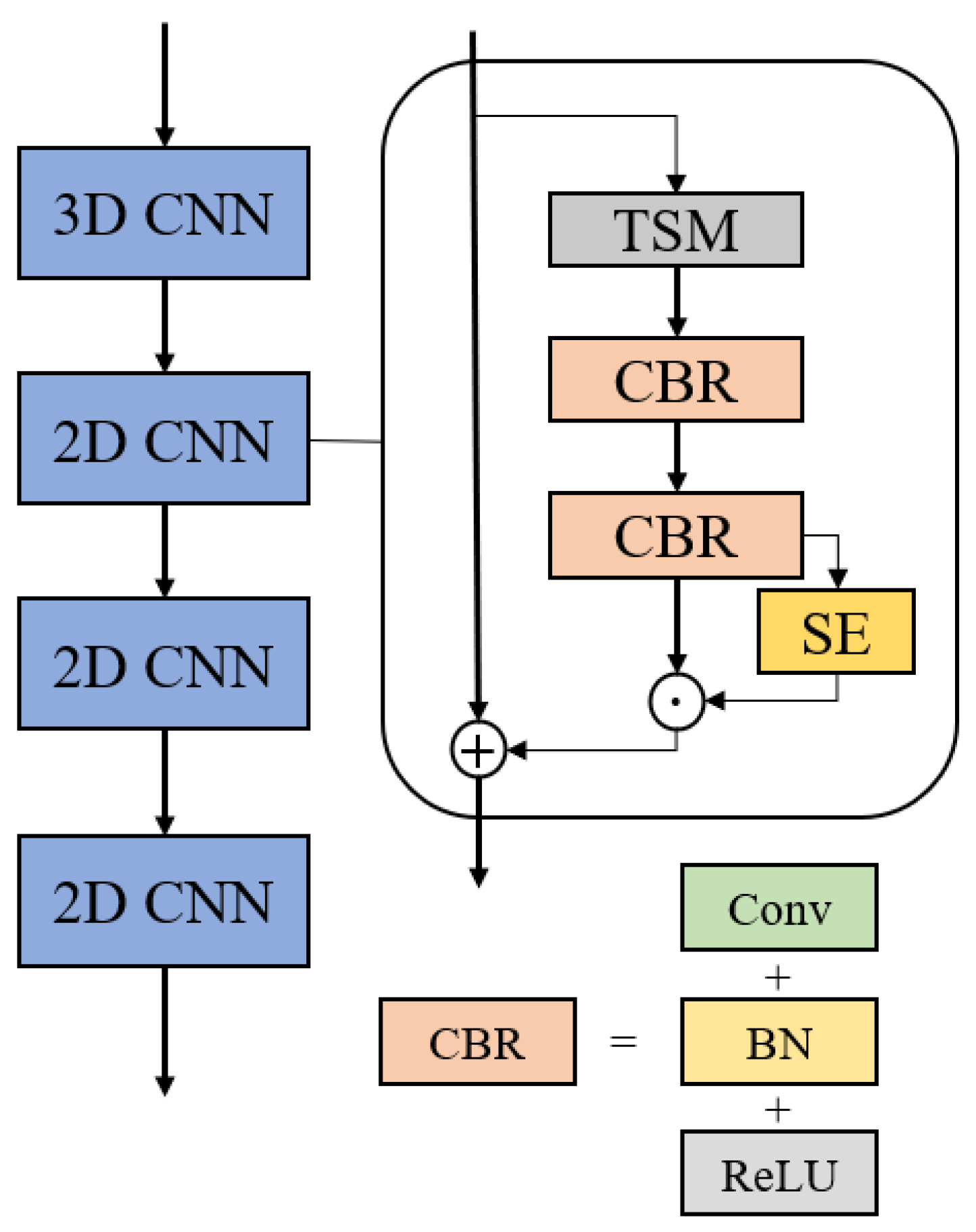
Compared with 2D CNN, 3D can extract short-term spatial-temporal features, but it has too many parameters, and the training cost of the model is high. Besides, in recent years, most lipreading models have used 2D CNN or a mixture of 2D CNN and 3D CNN to replace 3D CNN. Based on the above researchers, we re-evaluated the structure of the whole front-end model. As shown in
Table 3, the origin 3D ResNet-18 is more effective than 2D ResNet-18, and the reason is the 2D ResNet-18 cannot extract temporal information, which is important in lipreading. Then we inserted TSM into the residual block, and the performance of 2D ResNet-18 increased and was even better than 3D ResNet-18.
Besides, we also evaluated the model with three data augment methods. Cutout works by randomly covering the face with a fixed size and helps the model focus on other areas of the face, not just the lips. MixUp reduces the risk of overfitting by mixing two samples from the batch in a random proportion into a new sample. Both approaches have had great success, but as far as we know, no researchers have explored their interactions with different convolution structures. On the other hand, we introduced CutMix, which is also a very useful data augment way and can be seen as a combination of the above two methods.
Table 4 shows the effects of these three data expansion methods under different convolution structures, where C represents the proportion of covered Windows and A represents the mixing factor. Obviously, CutMix is very poor compared to cutout and mix-up. The effect of cutout in the full 2D CNN is better than that in 3D + 2D CNN. MixUp, on the contrary, performed better in 3D + 2D CNN than in the full 2D CNN.
Based on the experiment results above, we carried out experiments with the proposed model with the same sampling interval of 1–3 (fast channels sampling interval-slow channels, sampling interval). As can be seen in
Table 5, when the front-end network with the full 3D structure is the structure used in the original slow-fast, it has a very poor effect. On the contrary, after replacing most of the convolution layers in the network with 2D CNN, the accuracy has been significantly improved. Although the mixture structure of 3D CNN and 2D CNN has achieved the best results, the structure of full 2D CNN also has strong competitiveness.
3.3.2. Sampling Methods
The key of Slow-Fast Net is to set different sampling intervals for the fast and slow channel so that the model focuses on the dynamic region and static region, respectively. For word-level datasets, LRW and LRW-1000, the duration of each sample is within 2s, and the duration of the target word is even shorter, with the total frame number of the sample being 29–40, while the total frame number of the target word is less than 12. Therefore, for interval sampling, the sampling intervals of 1–2, 1–3, 1–6, 2–6, and 1–12 are used for this section’s experiments.
The sparse difference sampling strategy is another way to describe data. To ensure each sub-sequence is the same size and won’t be repeated, the last frame of the sample in LRW is discarded by default because the target word is usually in the middle frame so that the last frame can be regarded as redundant data. Considering the short duration of samples, we set the sparse sampling interval to 4, so that a 29-frame fragment can be divided into 7 segments, and each sub-sequence has 4 frames. In this way, the final sequence still has 24 frames after subtraction and a splicing of each segment.
The experimental results are shown in
Table 6, and the method of interval sampling is obviously better than sparse difference sampling. It can be seen that when the sampling interval of the slow channel and the fast channel is 1–3, the effect is the best. When the sampling interval is 1–2, the dynamic features and static features extracted by the model are equivalent to the linear superposition of two static ones because the sampling ratio is too close. When the sampling interval is 1–6, the accuracy decreases obviously because the sampling ratio is too far; when the sampling interval is 2–6, the sampling ratio of the slow channel and the fast channel returns to 1–3, and the effect is improved to above 88% at this time. Finally, when the sampling interval is 1–12, the extreme value of lip vocalization will be missed because the fast channel has a too-large frame interval.
3.3.3. Fusion Methods
As described in
Section 2.5, we experimented with early fusion and late fusion structures under the same convolution structure and the same sampling interval.
The experimental results are shown in
Table 7, and early fusion performs better. We believe that this problem is that the late fusion method ignores the correlation between the static and dynamic features extracted by the fast and slow channels.
3.3.4. Comparison with Relative Works
The above experiments show that the Slow-Fast Network with a mixture of 3D and 2D convolution and early fusion methods with 1–3 sampling intervals has the best performance. Based on the above structure selection and parameter setting, we compared some methods in
Table 8.
The Multi-Grained [
22] integrates information of different granularity and learnable spatial attention modules, which can capture the nuances between words and the styles of different speakers. The two-stream network I3D [
8] composed of deep 3D CNN is used to replace the previous mixture of convolution networks. For noises such as posture, speaker appearance, and speed change, GLMIN [
23] combines the global mutual information constraint (GMIM) and local mutual information constraint (LMIM), enhancing the relationship between spatial information and audio information acquired. Multi-Scale Temporal Convolution Network (MS-TCN) [
5] uses the temporal convolution network (TCN) instead of RNN. On the other hand, given the training sample with a temporal inconsistency problem, variable-length enhancement was proposed to solve the problem. The deformation flow network (DFN) [
24] studies the deformation flow between adjacent frames. The model will extract the flow distortion and the original gray frame for combination. CBAM [
20] reconsidered the key areas in lipreading and found that other regions of the face beyond the lip are also helpful. TSM [
6] combined with the Temporal-Shift Module so that the current feature map could obtain the relevant information of the previous and subsequent frames by moving part channels of the current feature map in the temporal dimension.
The SpotFast [
25] is also based on the Slow-Fast Net used, but our focus is completely different. To concentrate on the keyframes of the target word, the author replaced the slow channel, which uses a spot channel, and set the sampling rate of the fast channel to 1. That is, all frames are selected, which is the same as the original slow channel. At the same time, to improve the performance of the back-end model, the network places a transformer with memory augment as an encoder on each path.
Compared with these methods, the accuracy of our proposed method in LRW and LRW-1000 is 88.52% and 58.17%, respectively, which is the latest SOTA. The audio-visual method [
12,
13] tries to get a memory network of audio data and lip data. Among them, Kim et al. improved the previous work, which used Multi-head Visual-audio Memory (MVM) [
12] and multi-temporal levels to solve homophones. They employed reconstruction-based learning and contrastive learning to train the value memory network during the training stage and improved the accuracy by 3% in LRW-1000. SE-ResNet [
26] summarized the previous lipreading tricks and achieved the best performance on the two lipreading datasets, LRW and LRW-1000. Mainly applied are the word boundary and face alignment; that is the key, that the uni-modal could achieve a higher result than the bimodal. Compared with SE-ResNet, the proposed LSF in this paper could obtain more effective lip motion and improve the accuracy by 2.4% in LRW-1000.
3.3.5. Statistical Results
We made statistics on the recognition results of all words in the LRW test set first and show the top-50 accuracy in
Table 9. As shown in the table, there are quite a few words whose accuracy can be guaranteed to reach 100% in the complex field environment.
Figure 7 shows the effectiveness of our method for a single word in LRW. According to our statistics, there are 110 categories of words with a recognition rate of more than 95%; 212 categories of words with a recognition rate of more than 90%; 333 categories of words with a recognition rate of more than 80%; and 52 categories of words with a recognition rate of less than 50%. Compared with baseline, the number of samples whose recognition accuracy is more than 95% of LSF is doubled, while the number of samples whose recognition rate is less than 50% is reduced by 40%.
Figure 8 shows the effectiveness of our method for a single word in LRW-1000. Due to the low recognition rate of this dataset, we plotted the accuracy of each stage in detail. As shown in the figure, the improvement of LSF relative to the baseline model is mainly focused on words with a recognition rate above 80%. Although the result is not ideal, it is still the best recognition result.
4. Conclusions
In this paper, we focused on enhancing the ability to extract spatial-temporal features in the front-end network of lipreading. A new front-end model with two effective CNN streams is proposed to extract relative dynamic features in the image sequence. We used a larger sampling interval and a CNN stream with a lower channel capacity to capture the dynamic temporal information between sequences. For static spatial information within a single frame, we used a smaller sampling interval and a CNN stream with a larger channel capacity to capture it. At the same time, the extracted dynamic information extracted was sent to static information through lateral connection and then fused. Same as the baseline, the backbone of the proposed model is ResNet-18.
On the other hand, we combined some existing modules and data augment methods to explore the best convolution structure of the front-end model. Under the residual module designed by us, the performance of full 2D CNN with the same number of layers could achieve a similar performance to that of 3D + 2D CNN. Meanwhile, we find that the cutout is more effective for full 2D CNN, while the mix-up is more effective for 3D + 2D CNN. Considering the characteristics of word-level lipreading data, in this paper, we introduced two sampling methods and conducted detailed ablation experiments on the sampling methods. Besides, we further explored two fusion modes of the front-end net and back-end net.
Under such architecture, we verified the proposed model in two challenging lipreading datasets and demonstrated a wonderful performance. We believe the model has great potential beyond lipreading, especially in fine-grained action recognition.
In the future, we will further focus on the front-end with a lightweight structure but better performance. Besides, though the training cost of bimodal is much higher than uni-modal lipreading, the research of audio-visual lipreading is still our future work.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}