
Rolling Bearing Fault Diagnosis Based on Markov Transition Field and Residual Network

Abstract
:1. Introduction
- A novel two-step fault diagnosis method is proposed that converts raw vibration signals into images through the Markov transition field, and adopts the residual network for feature extraction and fault identification.
- The signal-to-image conversion preserves the time dependence of the raw vibration signals and retains sufficient temporal features without setting parameters involving expert knowledge. Residual learning is applied to effectively address degradation problems in the deep neural network.
- The effectiveness of the proposed model was verified on a popular bearing dataset. Compared with some existing methods, the MTF-ResNet method achieved better accuracy in bearing fault diagnosis.
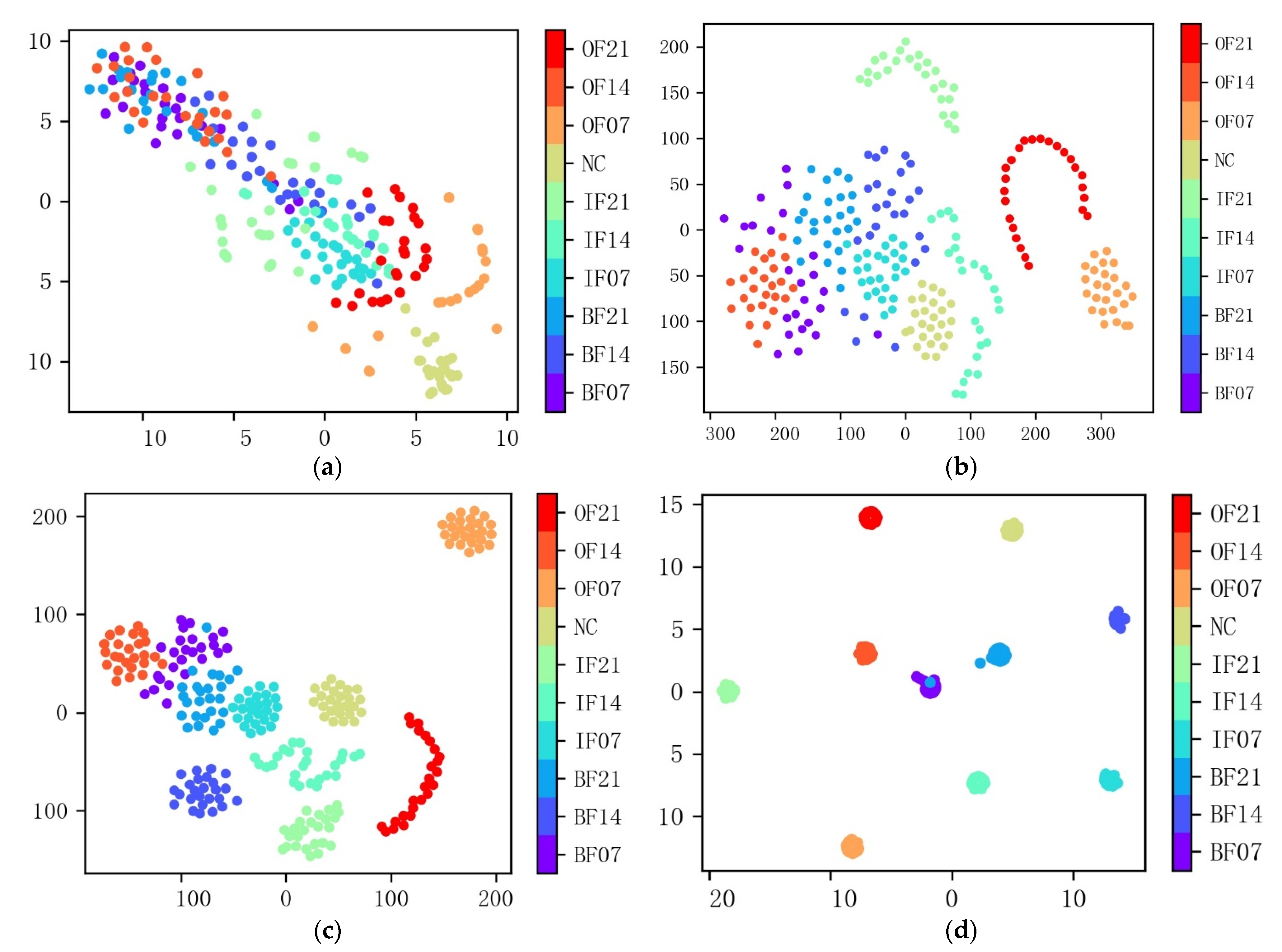
- To further demonstrate the performance of the proposed method and investigate the intrinsic mechanism of the CNN model in bearing fault diagnosis, t-SNE was used to visualize the feature maps learned by the model.
2. Background and Related Work
2.1. Convolutional Layer
2.2. Pooling Layer
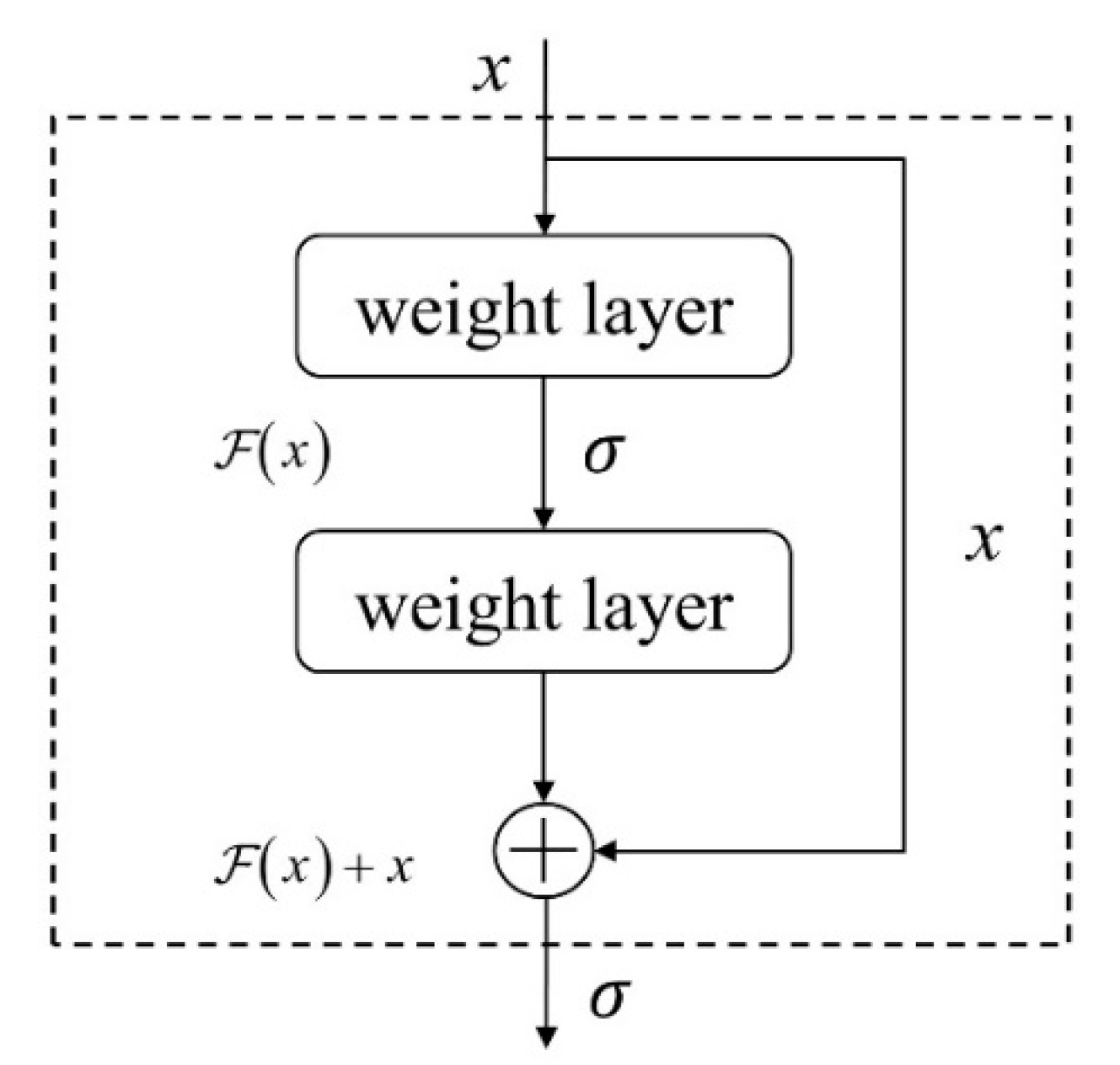
2.3. Residual Network
3. Proposed Model for Fault Diagnosis
3.1. Data Augmentation
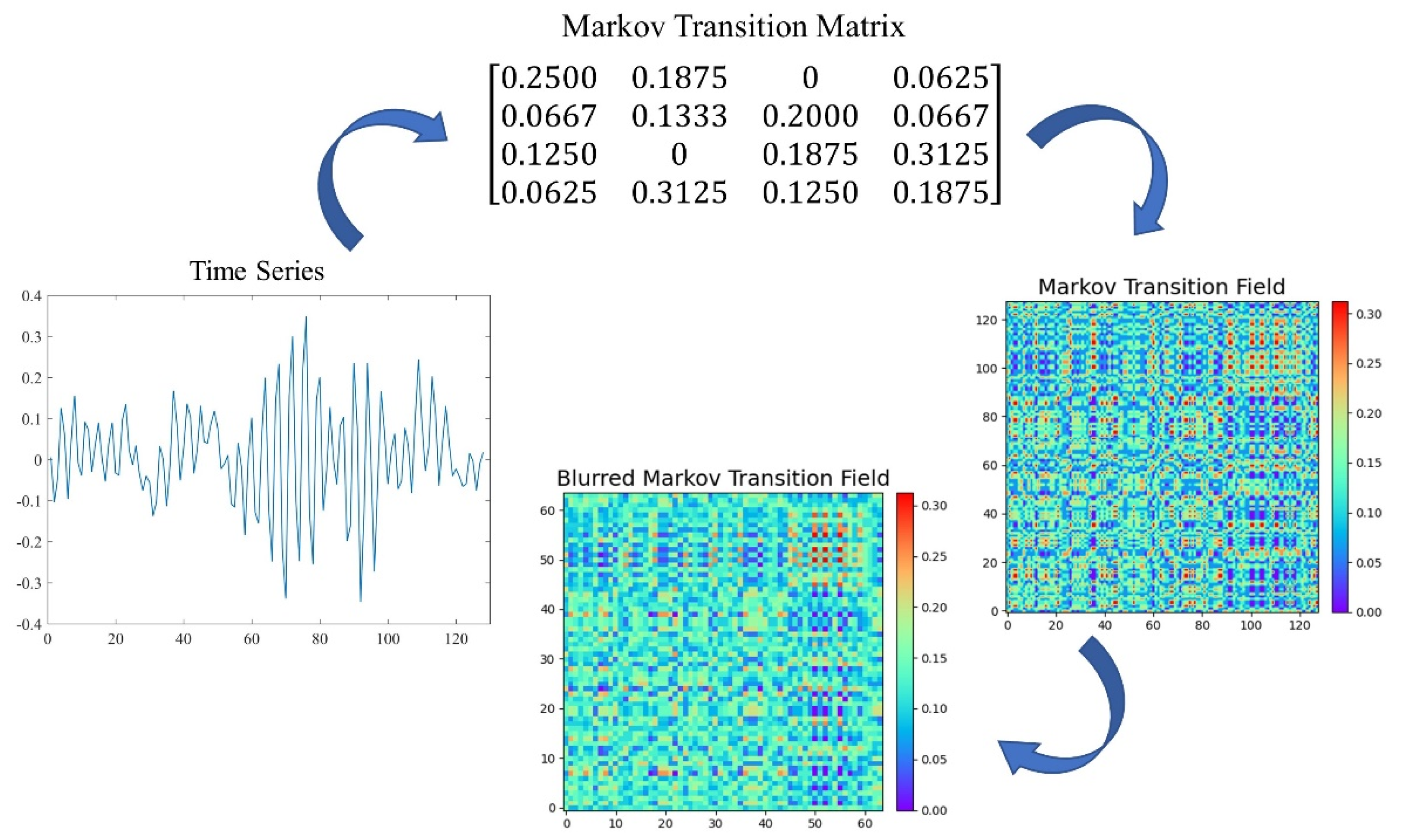
3.2. Signal-to-Image Conversion
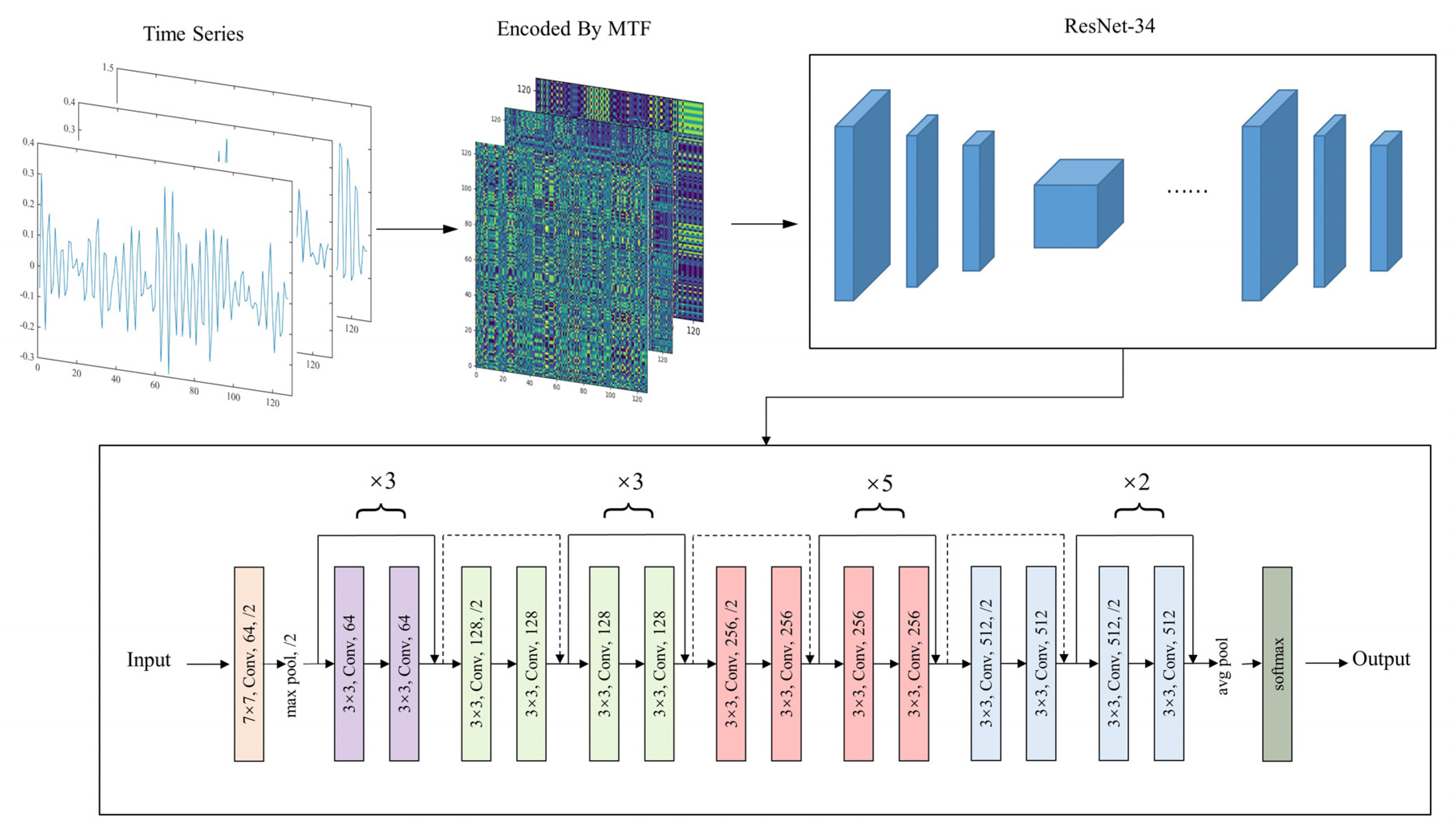
3.3. Network Architecture
4. Experiments and Results
4.1. Data Processing
4.2. Data Analysis
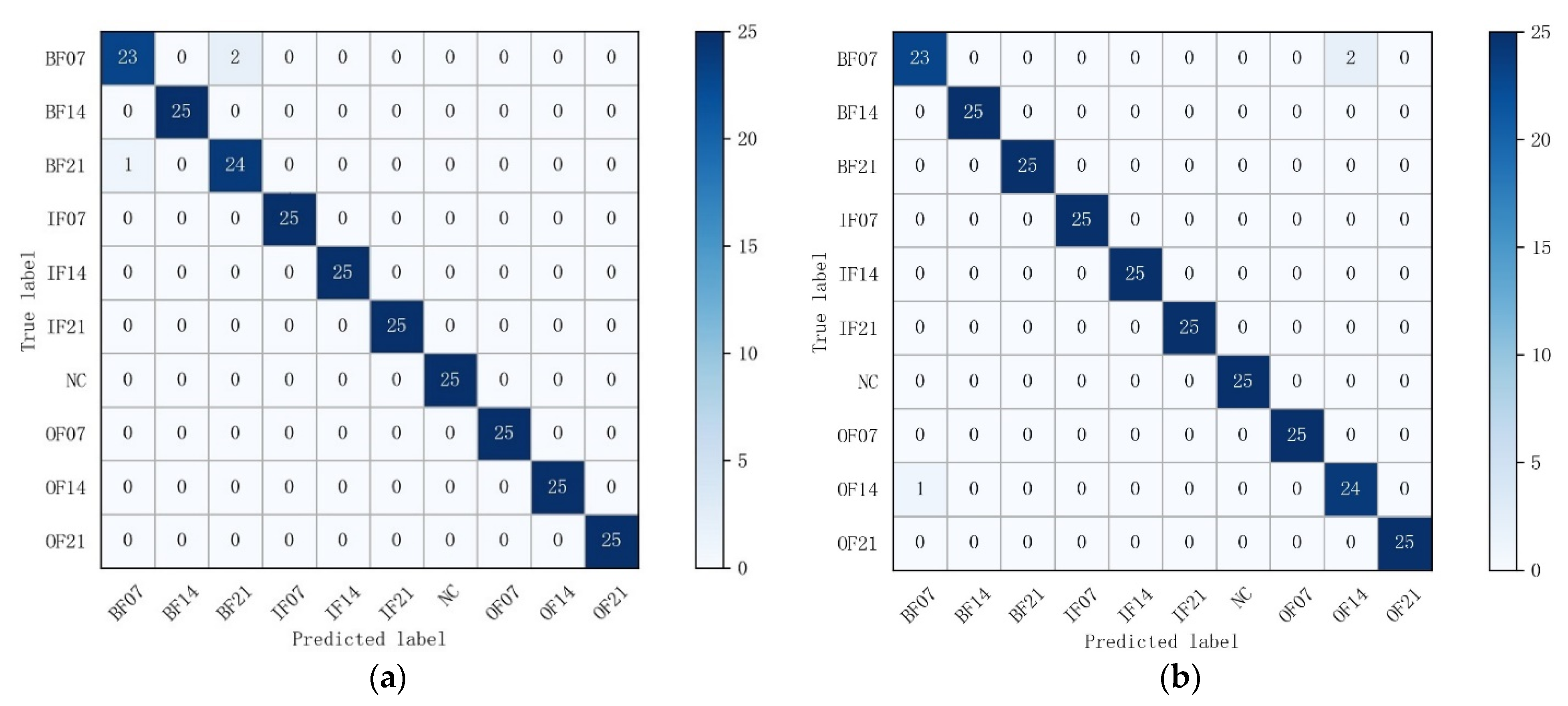
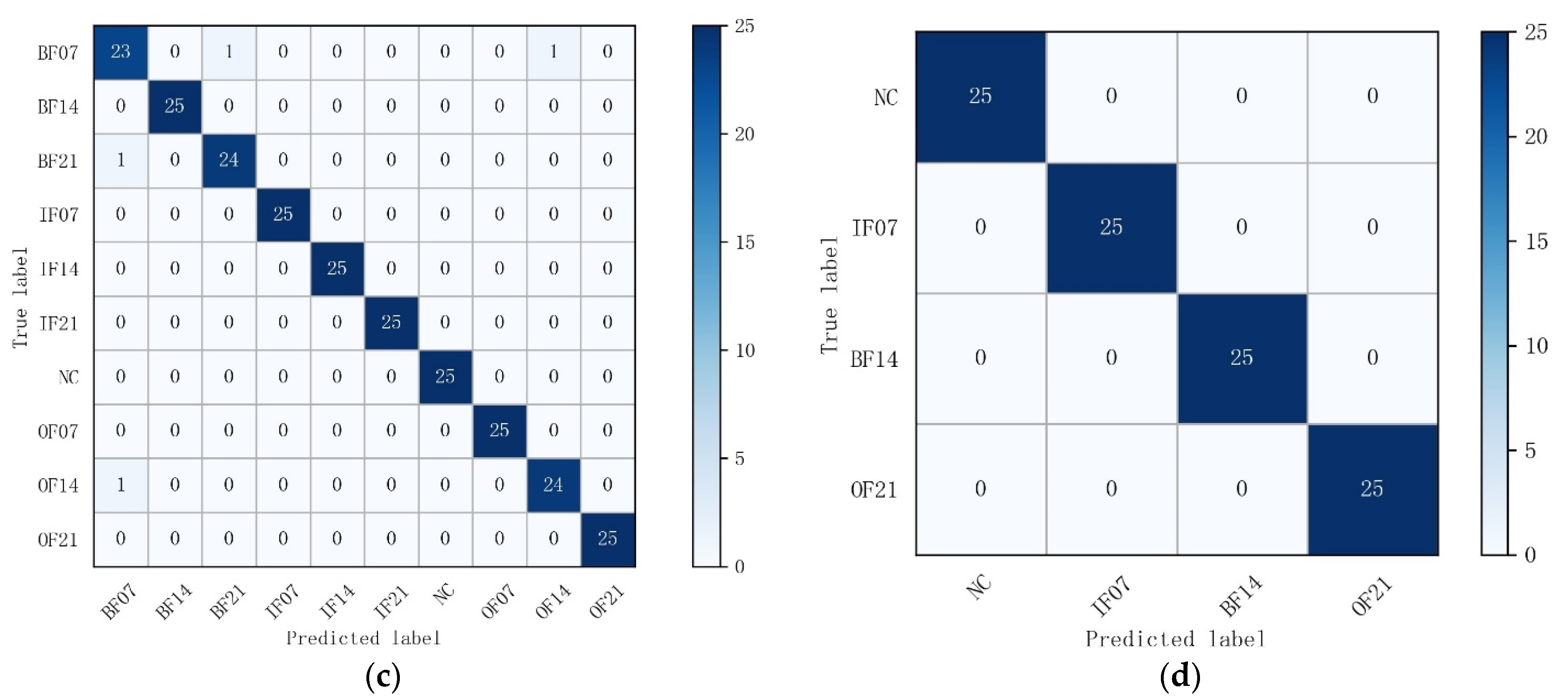
4.3. Model Performance with Different Residual Network Structures
4.4. Comparison with Other Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, B.; He, Z.; Chen, X.; Cao, H.; Cai, G.; Zi, Y. A demodulating approach based on local mean decomposition and its applications in mechanical fault diagnosis. Meas. Sci. Technol. 2011, 22, 055704. [Google Scholar] [CrossRef]
- Jayaswal, P.; Verma, S.N.; Wadhwani, A.K. Development of EBP-Artificial neural network expert system for rolling element bearing fault diagnosis. J. Vib. Control 2011, 17, 1131–1148. [Google Scholar] [CrossRef]
- Yiakopoulos, C.T.; Gryllias, K.C.; Antoniadis, I.A. Rolling element bearing fault detection in industrial environments based on a K-means clustering approach. Expert Syst. Appl. 2011, 38, 2888–2911. [Google Scholar] [CrossRef]
- Zheng, J.; Pan, H.; Cheng, J. Rolling bearing fault detection and diagnosis based on composite multiscale fuzzy entropy and ensemble support vector machines. Mech. Syst. Signal Process. 2017, 85, 746–759. [Google Scholar] [CrossRef]
- Lei, Y.; Jia, F.; Zhou, X.; Lin, J. A deep learning-based method for machinery health monitoring with big data. Jixie Gongcheng Xuebao J. Mech. Eng. 2015, 51, 49–56. [Google Scholar] [CrossRef]
- He, M.; He, D. Deep Learning Based Approach for Bearing Fault Diagnosis. IEEE Trans. Ind. Appl. 2017, 53, 3057–3065. [Google Scholar] [CrossRef]
- Chen, J.; Li, Z.; Pan, J.; Chen, G.; Zi, Y.; Yuan, J.; Chen, B.; He, Z. Wavelet transform based on inner product in fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process 2016, 70–71, 1–35. [Google Scholar] [CrossRef]
- Guo, T.; Deng, Z. An improved EMD method based on the multi-objective optimization and its application to fault feature extraction of rolling bearing. Appl. Acoust. 2017, 127, 46–62. [Google Scholar] [CrossRef]
- Cai, B.; Liu, H.; Xie, M. A real-time fault diagnosis methodology of complex systems using object-oriented Bayesian networks. Mech. Syst. Signal Process. 2016, 80, 31–44. [Google Scholar] [CrossRef]
- Hajnayeb, A.; Ghasemloonia, A.; Khadem, S.E.; Moradi, M.H. Application and comparison of an ANN-based feature selection method and the genetic algorithm in gearbox fault diagnosis. Expert Syst. Appl. 2011, 38, 10205–10209. [Google Scholar] [CrossRef]
- Saidi, L.; Ben Ali, J.; Friaiech, F. Application of higher order spectral features and support vector machines for bearing faults classification. Isa Trans. 2015, 54, 193–206. [Google Scholar] [CrossRef]
- Tian, J.; Morillo, C.; Azarian, M.H.; Pecht, M. Motor Bearing Fault Detection Using Spectral Kurtosis-Based Feature Extraction Coupled With K-Nearest Neighbor Distance Analysis. IEEE Trans. Ind. Electron. 2016, 63, 1793–1803. [Google Scholar] [CrossRef]
- Young, T.; Hazarika, D.; Poria, S.; Cambria, E. Recent Trends in Deep Learning Based Natural Language Processing. IEEE Comput. Intell. Mag. 2018, 13, 55–75. [Google Scholar] [CrossRef]
- Noda, K.; Yamaguchi, Y.; Nakadai, K.; Okuno, H.G.; Ogata, T. Audio-visual speech recognition using deep learning. Appl. Intell. 2015, 42, 722–737. [Google Scholar] [CrossRef] [Green Version]
- Abu Mallouh, A.; Qawagneh, Z.; Barkana, B.D. Utilizing CNNs and transfer learning of pre-trained models for age range classification from unconstrained face images. Image Vis. Comput. 2019, 88, 41–51. [Google Scholar] [CrossRef]
- Shenfield, A.; Howarth, M. A Novel Deep Learning Model for the Detection and Identification of Rolling Element-Bearing Faults. Sensors 2020, 20, 5112. [Google Scholar] [CrossRef]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, X.; Niu, M. Rolling bearing fault diagnosis using an optimization deep belief network. Meas. Sci. Technol. 2015, 26, 115002. [Google Scholar] [CrossRef]
- Wen, L.; Gao, L.; Li, X. A New Deep Transfer Learning Based on Sparse Auto-Encoder for Fault Diagnosis. IEEE Trans. Syst. Man Cybern.-Syst. 2019, 49, 136–144. [Google Scholar] [CrossRef]
- Jiang, H.; Li, X.; Shao, H.; Zhao, K. Intelligent fault diagnosis of rolling bearings using an improved deep recurrent neural network. Meas. Sci. Technol. 2018, 29, 065107. [Google Scholar] [CrossRef]
- Hasan, M.J.; Sohaib, M.; Kim, J.-M. An Explainable AI-Based Fault Diagnosis Model for Bearings. Sensors 2021, 21, 4070. [Google Scholar] [CrossRef]
- Chen, Z.; Mauricio, A.; Li, W.; Gryllias, K. A deep learning method for bearing fault diagnosis based on Cyclic Spectral Coherence and Convolutional Neural Networks. Mech. Syst. Signal Process. 2020, 140, 106683. [Google Scholar] [CrossRef]
- Guo, L.; Lei, Y.; Xing, S.; Yan, T.; Li, N. Deep Convolutional Transfer Learning Network: A New Method for Intelligent Fault Diagnosis of Machines with Unlabeled Data. IEEE Trans. Ind. Electron. 2019, 66, 7316–7325. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lu, N.; Xing, S. Deep normalized convolutional neural network for imbalanced fault classification of machinery and its understanding via visualization. Mech. Syst. Signal Process. 2018, 110, 349–367. [Google Scholar] [CrossRef]
- Hoang, D.-T.; Kang, H.-J. Rolling element bearing fault diagnosis using convolutional neural network and vibration image. Cogn. Syst. Res. 2019, 53, 42–50. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Li, G.; Deng, C.; Wu, J.; Chen, Z.; Xu, X. Rolling Bearing Fault Diagnosis Based on Wavelet Packet Transform and Convolutional Neural Network. Appl. Sci.-Basel 2020, 10, 770. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Oates, T. Encoding Time Series as Images for Visual Inspection and Classification Using Tiled Convolutional Neural Networks. In Proceedings of the Workshops at the Twenty-ninth AAAI Conference on Artificial Intelligence, Austin, TA, USA, 25–30 January 2015. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Bengio, Y.; Courville, A.; Vincent, P. Representation learning: A review and new perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1798–1828. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Smith, W.A.; Randall, R.B. Rolling element bearing diagnostics using the Case Western Reserve University data: A benchmark study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]
- Pham, M.T.; Kim, J.-M.; Kim, C.H. Accurate Bearing Fault Diagnosis under Variable Shaft Speed using Convolutional Neural Networks and Vibration Spectrogram. Appl. Sci. 2020, 10, 6385. [Google Scholar] [CrossRef]
- Eren, L.; Ince, T.; Kiranyaz, S. A Generic Intelligent Bearing Fault Diagnosis System Using Compact Adaptive 1D CNN Classifier. J. Signal Process. Syst. 2019, 91, 179–189. [Google Scholar] [CrossRef]
- Li, S.; Liu, G.; Tang, X.; Lu, J.; Hu, J. An Ensemble Deep Convolutional Neural Network Model with Improved D-S Evidence Fusion for Bearing Fault Diagnosis. Sensors 2017, 17, 1729. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, H. Ji Bearing Fault Diagnosis with a Feature Fusion Method Based on an Ensemble Convolutional Neural Network and Deep Neural Network. Sensors 2019, 19, 2034. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yosinski, J.; Clune, J.; Bengio, Y.; Lipson, H. How transferable are features in deep neural networks? In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Name | ResNet-18 | ResNet-34 | ResNet-50 | Output Size |
|---|---|---|---|---|
| Conv1 | 7 × 7, 64, stride 2 | 112 × 112 | ||
| Conv2_x | 3 × 3 max pool, stride 2 | 56 × 56 | ||
| Conv3_x | 28 × 28 | |||
| Conv4_x | 14 × 14 | |||
| Conv5_x | 7 × 7 | |||
| Average pool, fc, softmax | 1 × 1 | |||
| Parameters | Value |
|---|---|
| Batch size | 32 |
| Optimizer | Adam |
| Lr | 0.0001 |
| Loss function | Category—cross-entropy |
| Dataset | Motor Load (hp) | Motor Speed (r/min) |
|---|---|---|
| A | 1 | 1772 |
| B | 2 | 1750 |
| C | 3 | 1730 |
| Fault Type | Fault Diameter (Inch) | Number of Samples | Label |
|---|---|---|---|
| BF07 | 0.007 | 660/25 | 0 |
| BF14 | 0.014 | 660/25 | 1 |
| BF21 | 0.021 | 660/25 | 2 |
| IF07 | 0.007 | 660/25 | 3 |
| IF14 | 0.014 | 660/25 | 4 |
| IF21 | 0.021 | 660/25 | 5 |
| NC | 0 | 660/25 | 6 |
| OF07 | 0.007 | 660/25 | 7 |
| OF14 | 0.014 | 660/25 | 8 |
| OF21 | 0.021 | 660/25 | 9 |
| Fault Type | Fault Diameter (Inch) | Motor Load (hp) | Label |
|---|---|---|---|
| NC | 0 | 0 | 0 |
| IF07 | 0.007 | 1 | 1 |
| BF14 | 0.014 | 2 | 2 |
| OF21 | 0.021 | 3 | 3 |
| Network | Epoch | Accuracy (%) |
|---|---|---|
| ResNet-18 | 100 | 94.12 |
| ResNet-34 | 100 | 98.52 |
| ResNet-50 | 100 | 96.44 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Kan, J.; Luo, H. Rolling Bearing Fault Diagnosis Based on Markov Transition Field and Residual Network. Sensors 2022, 22, 3936. https://doi.org/10.3390/s22103936
Yan J, Kan J, Luo H. Rolling Bearing Fault Diagnosis Based on Markov Transition Field and Residual Network. Sensors. 2022; 22(10):3936. https://doi.org/10.3390/s22103936
Chicago/Turabian StyleYan, Jialin, Jiangming Kan, and Haifeng Luo. 2022. "Rolling Bearing Fault Diagnosis Based on Markov Transition Field and Residual Network" Sensors 22, no. 10: 3936. https://doi.org/10.3390/s22103936
APA StyleYan, J., Kan, J., & Luo, H. (2022). Rolling Bearing Fault Diagnosis Based on Markov Transition Field and Residual Network. Sensors, 22(10), 3936. https://doi.org/10.3390/s22103936