
A Hybrid Leak Localization Approach Using Acoustic Emission for Industrial Pipelines




Abstract
:1. Introduction
2. Background of Minimum Entropy Deconvolution
3. The Time Difference of Acoustic Waves
- (1)
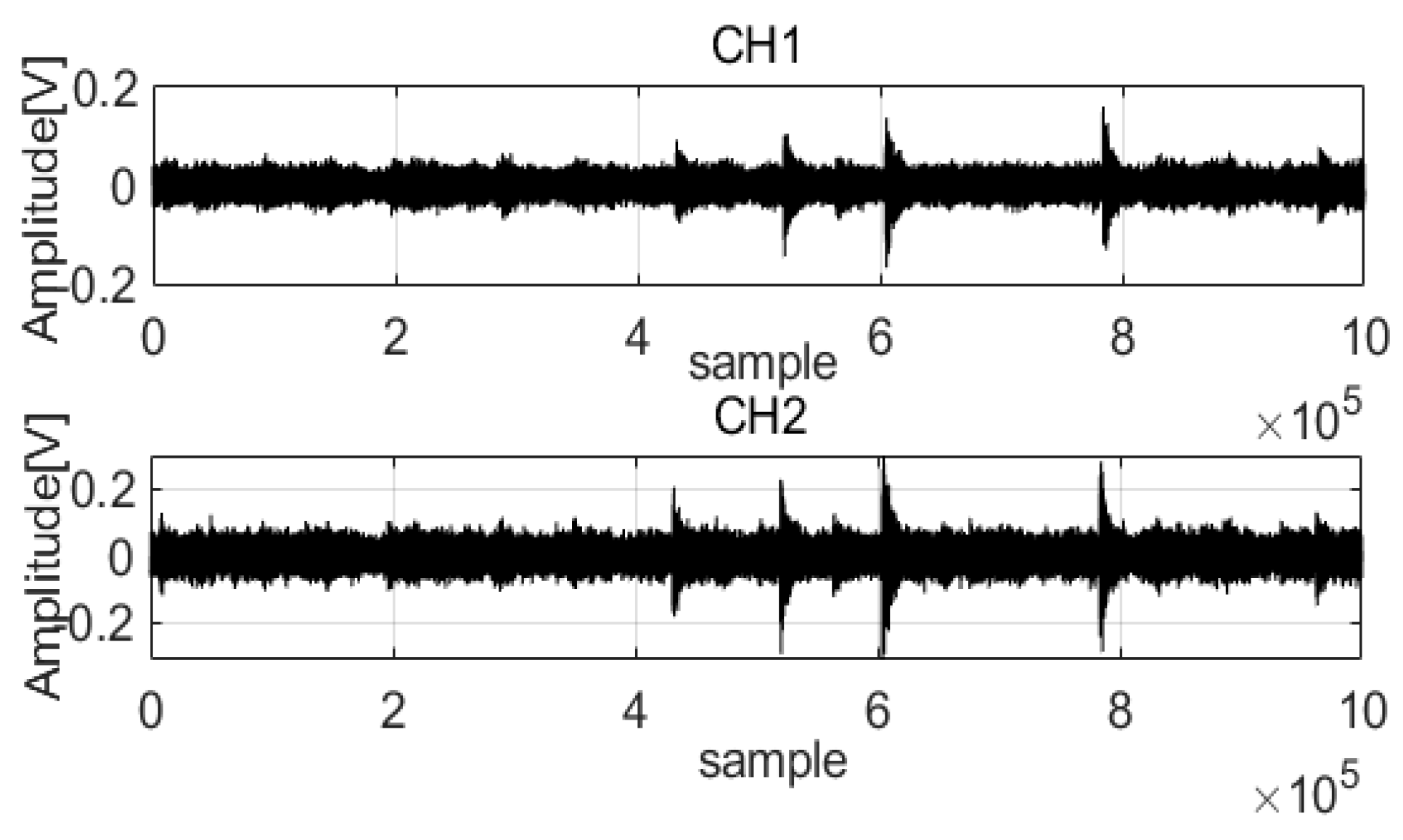
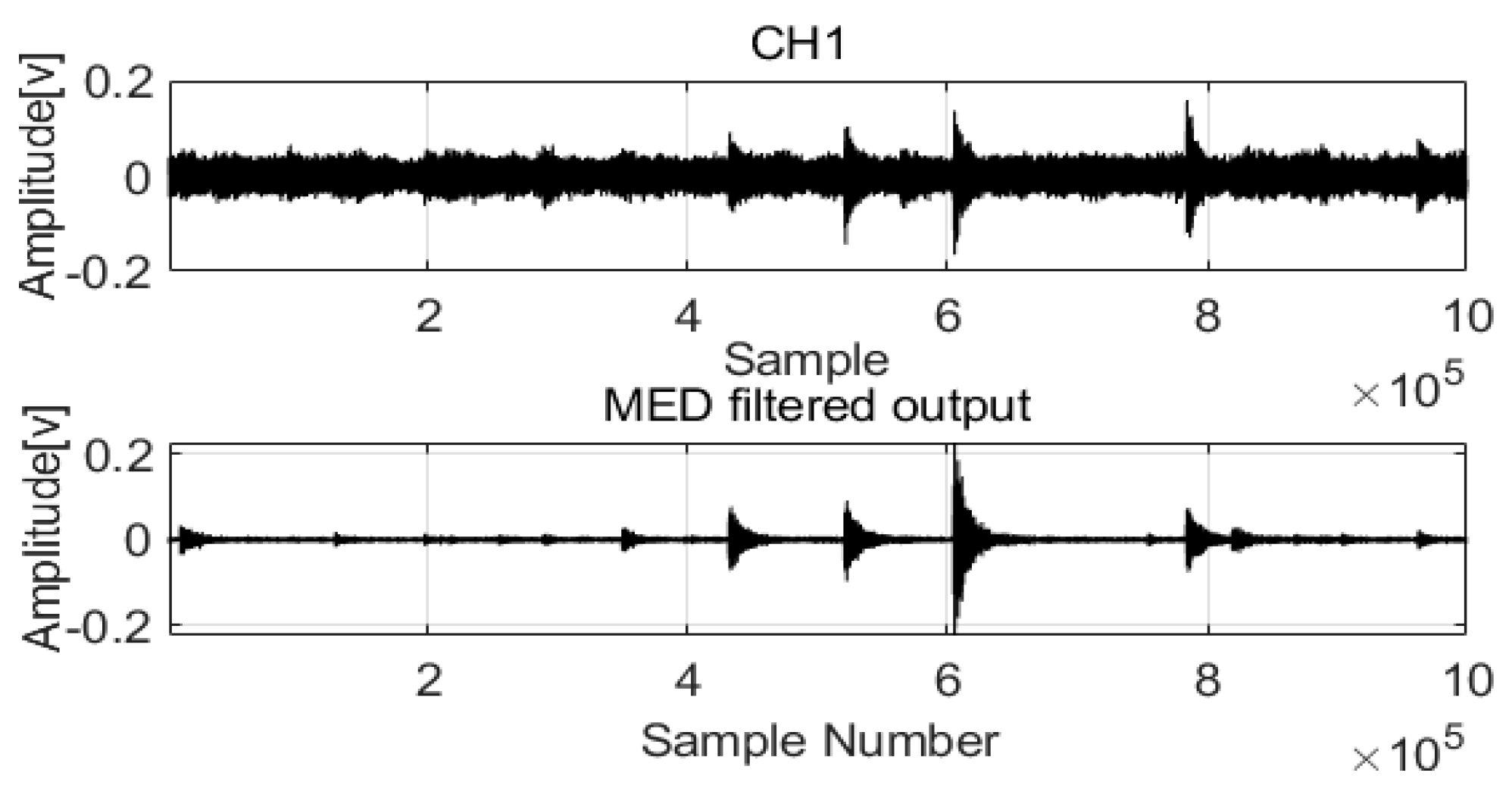
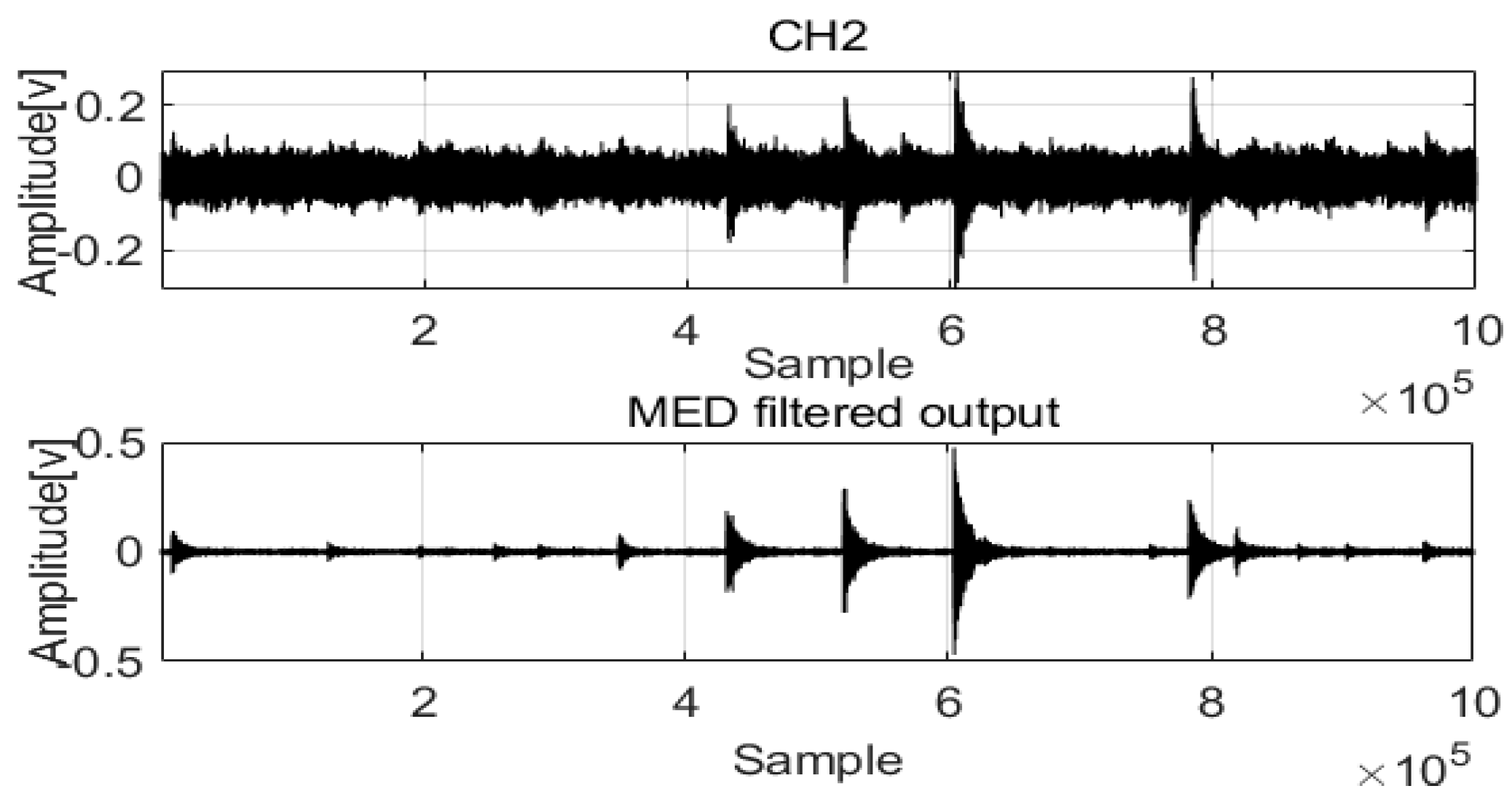
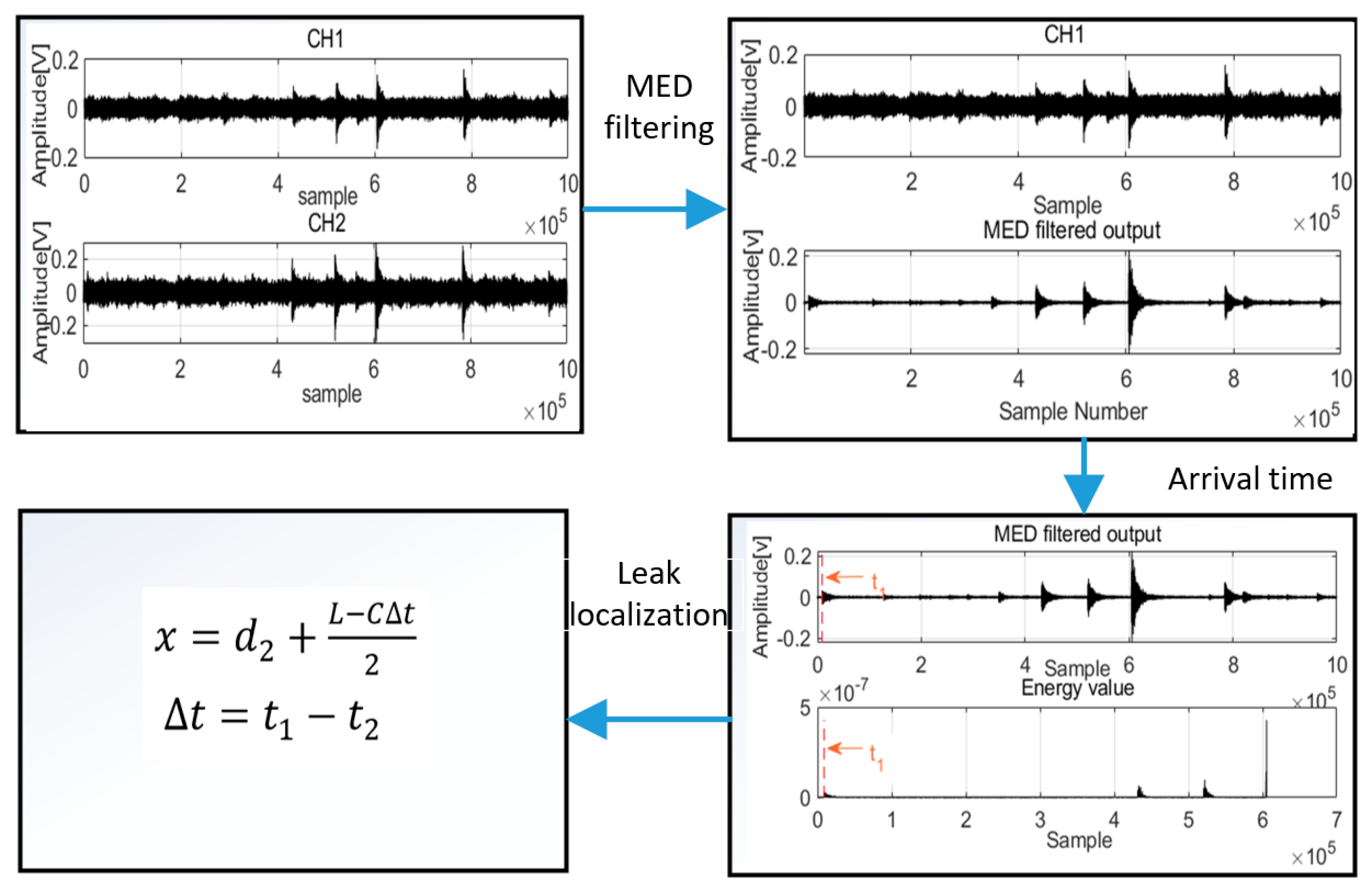
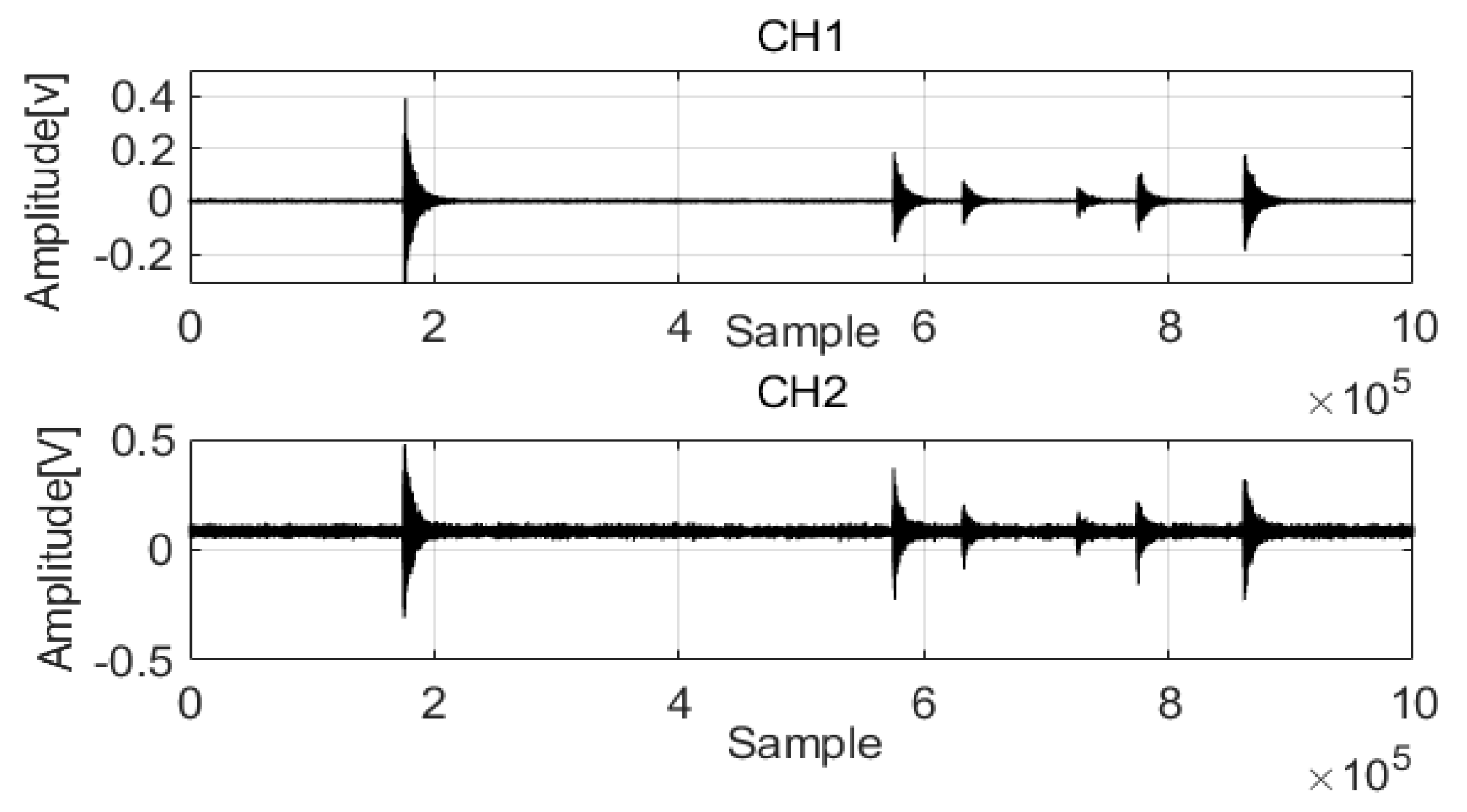
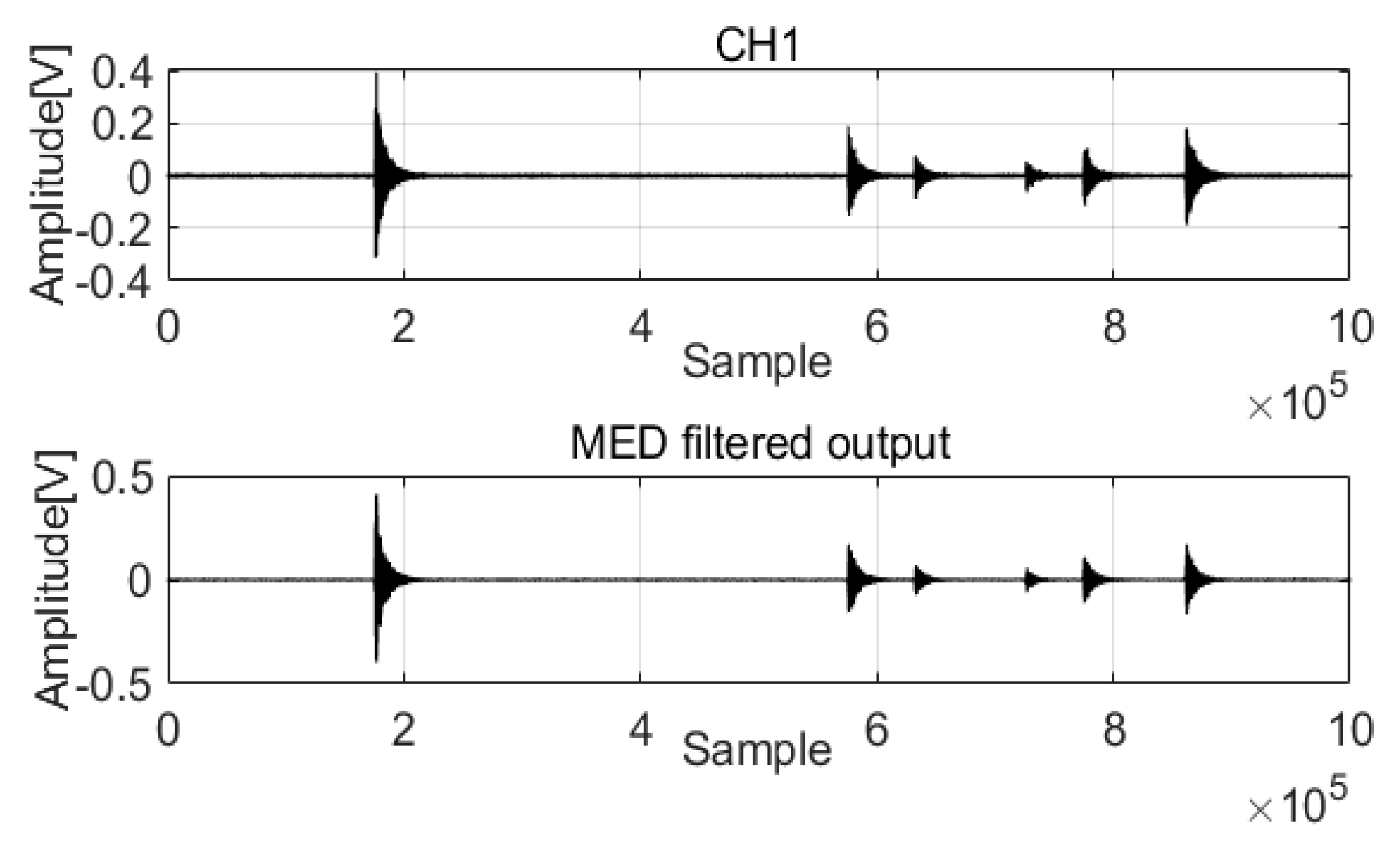
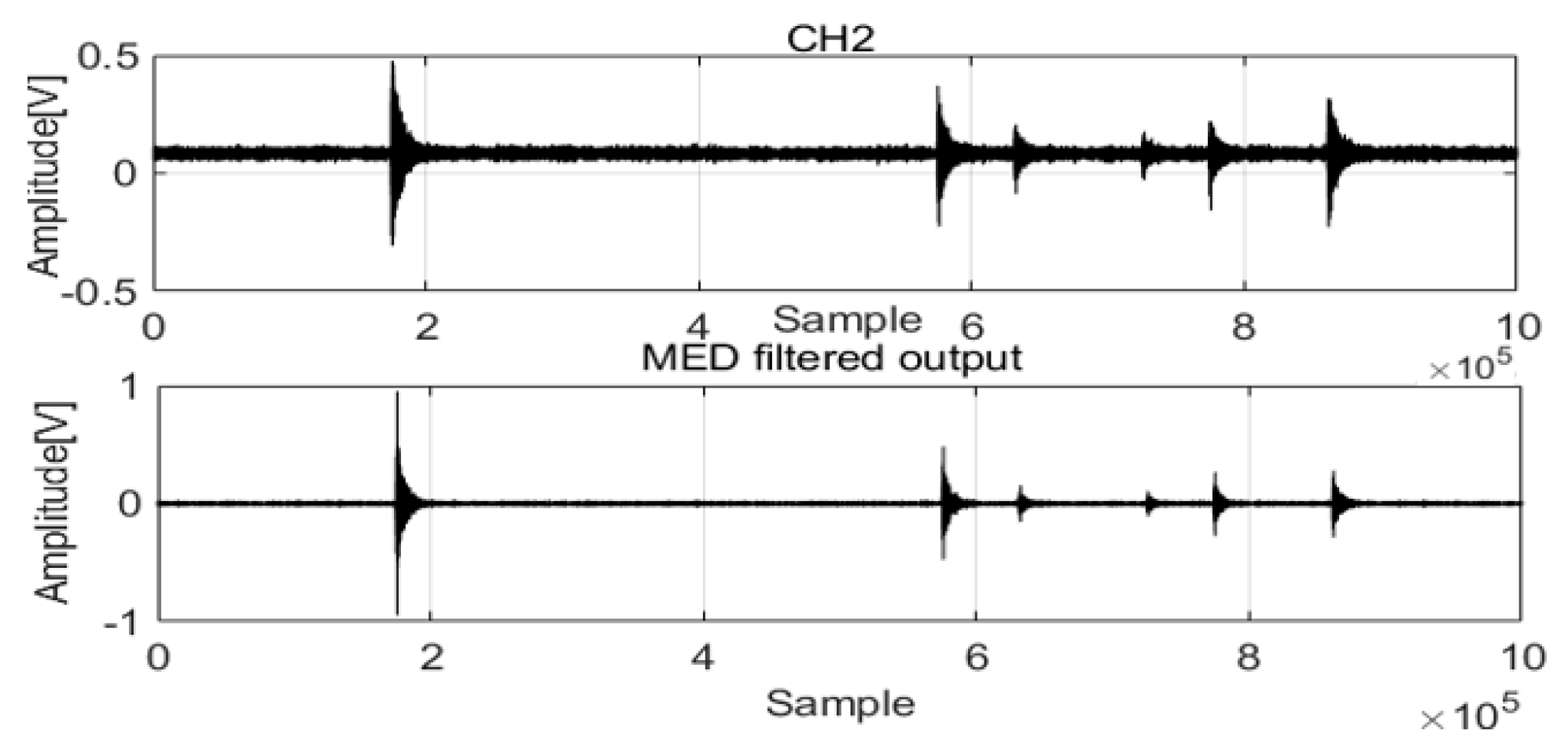
- Two AE signals are acquired from the pipeline for filter processing. In the first filter process, MED is used to remove noise from mixed signals.
- (2)
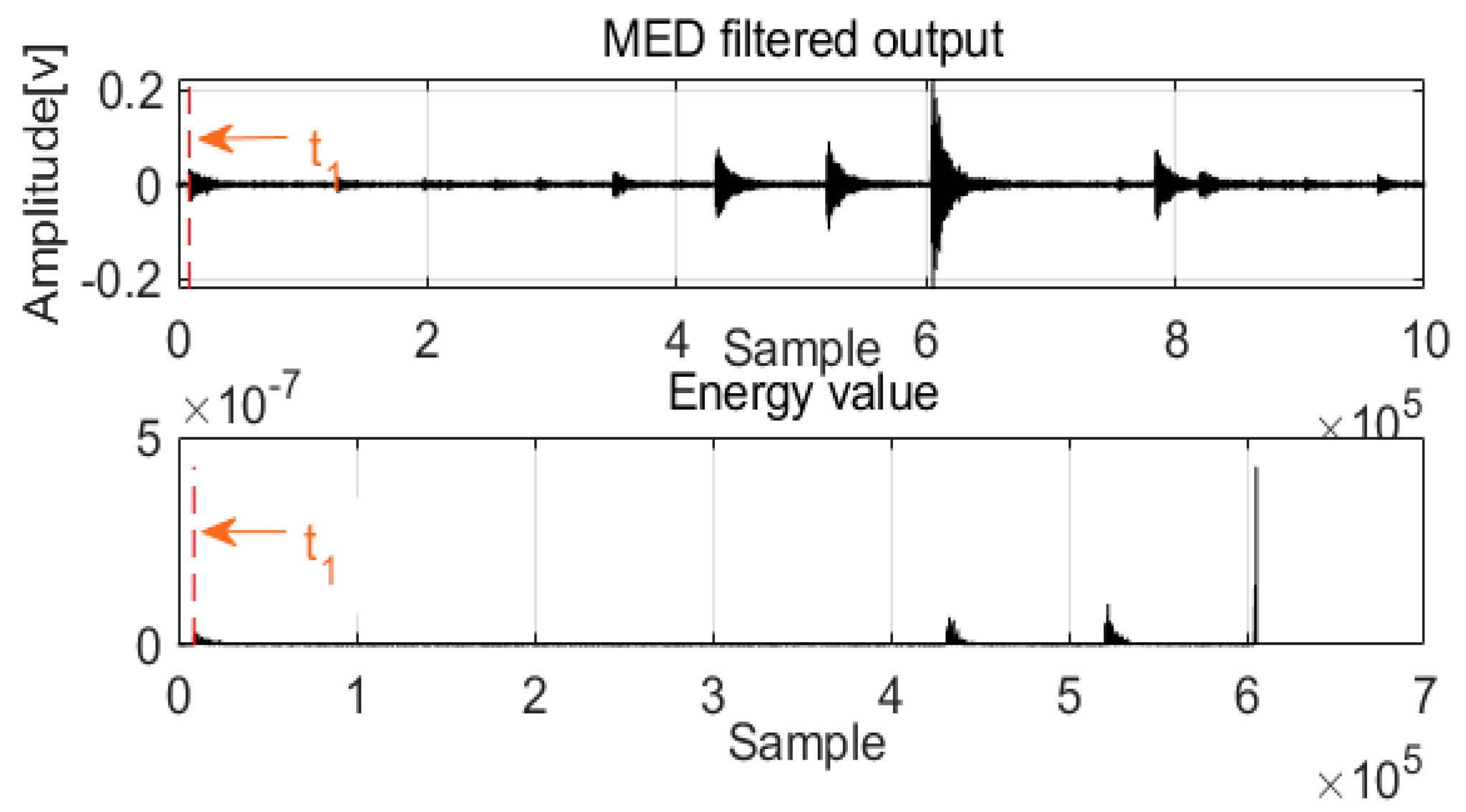
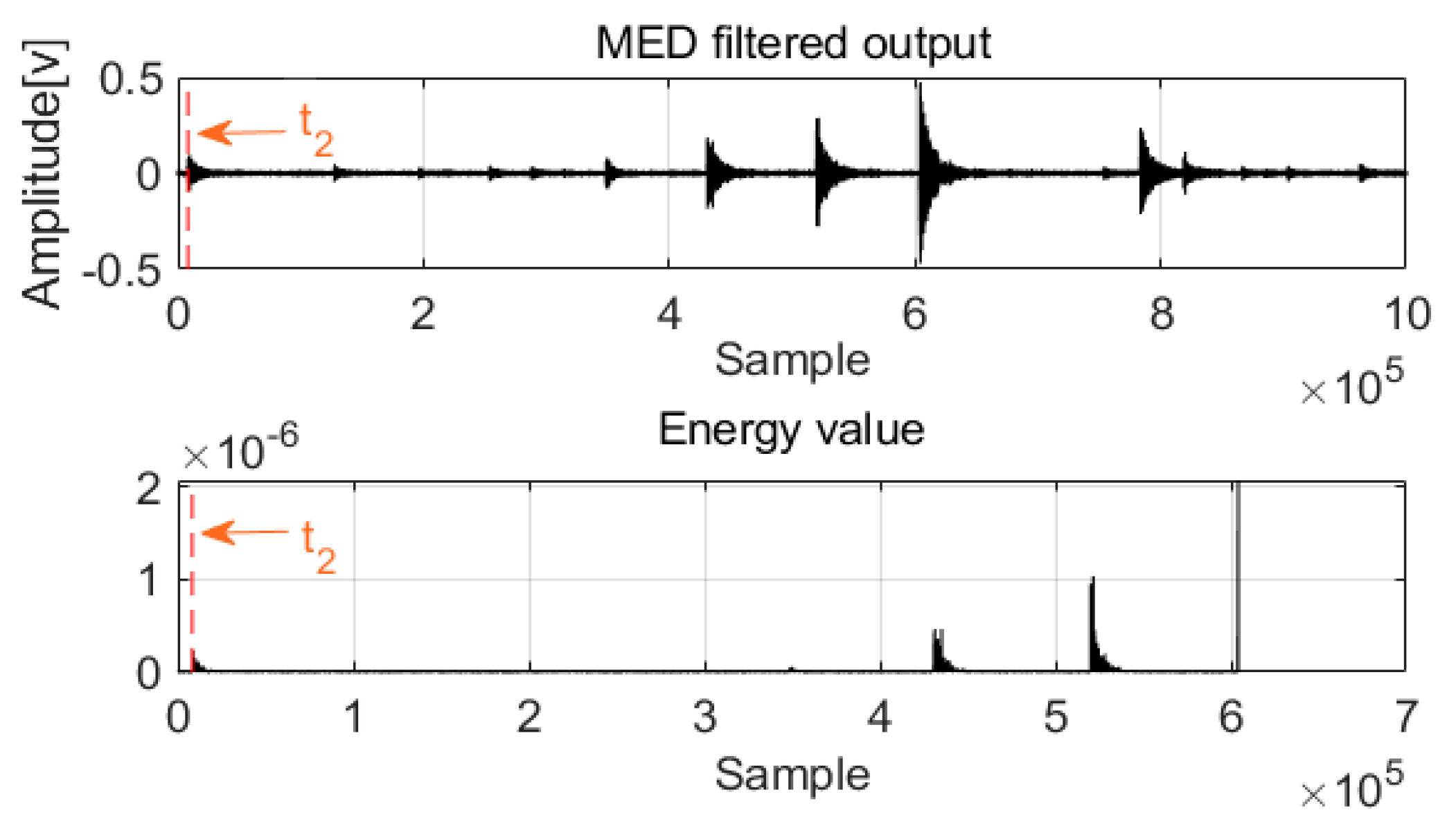
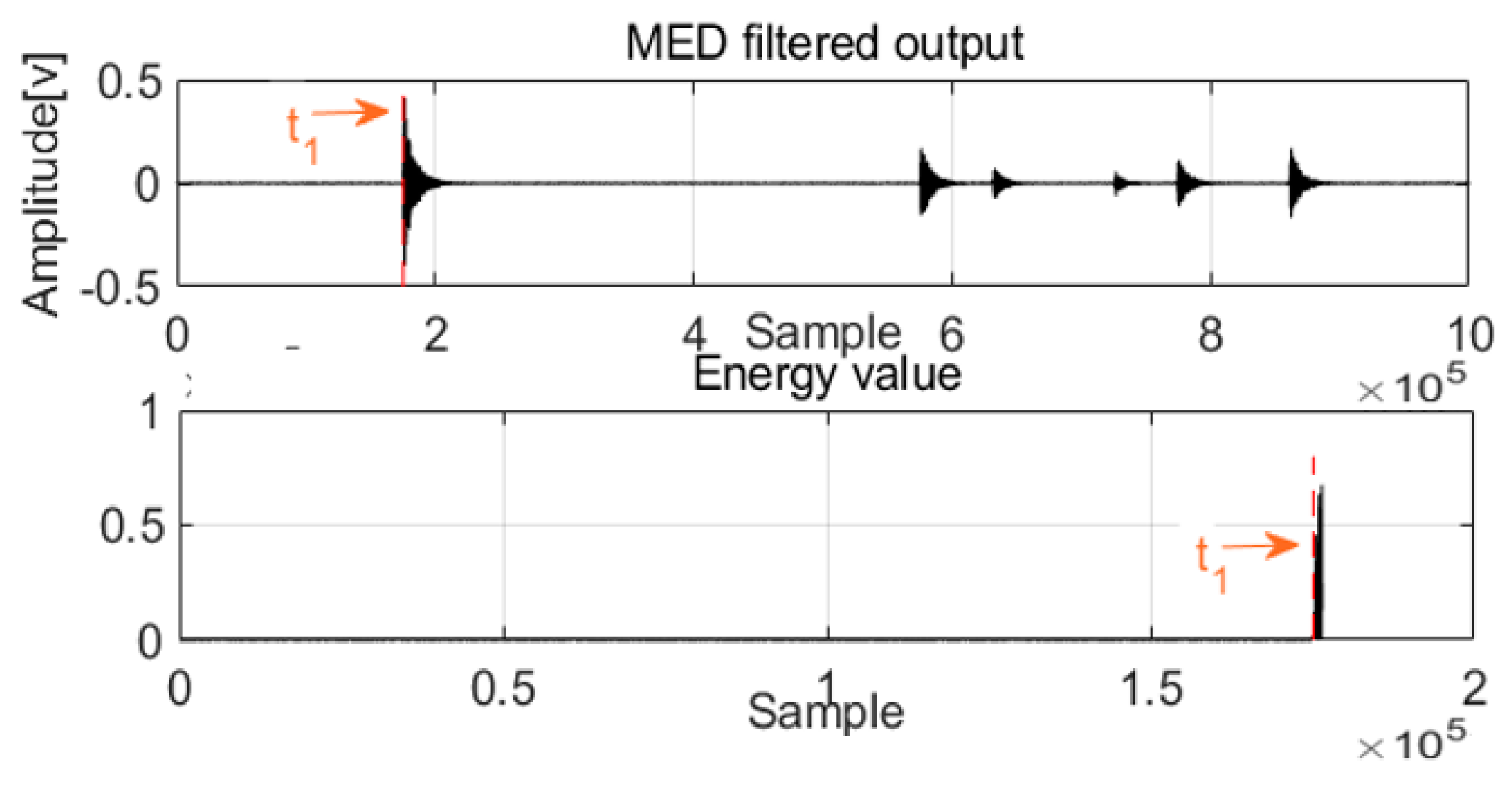
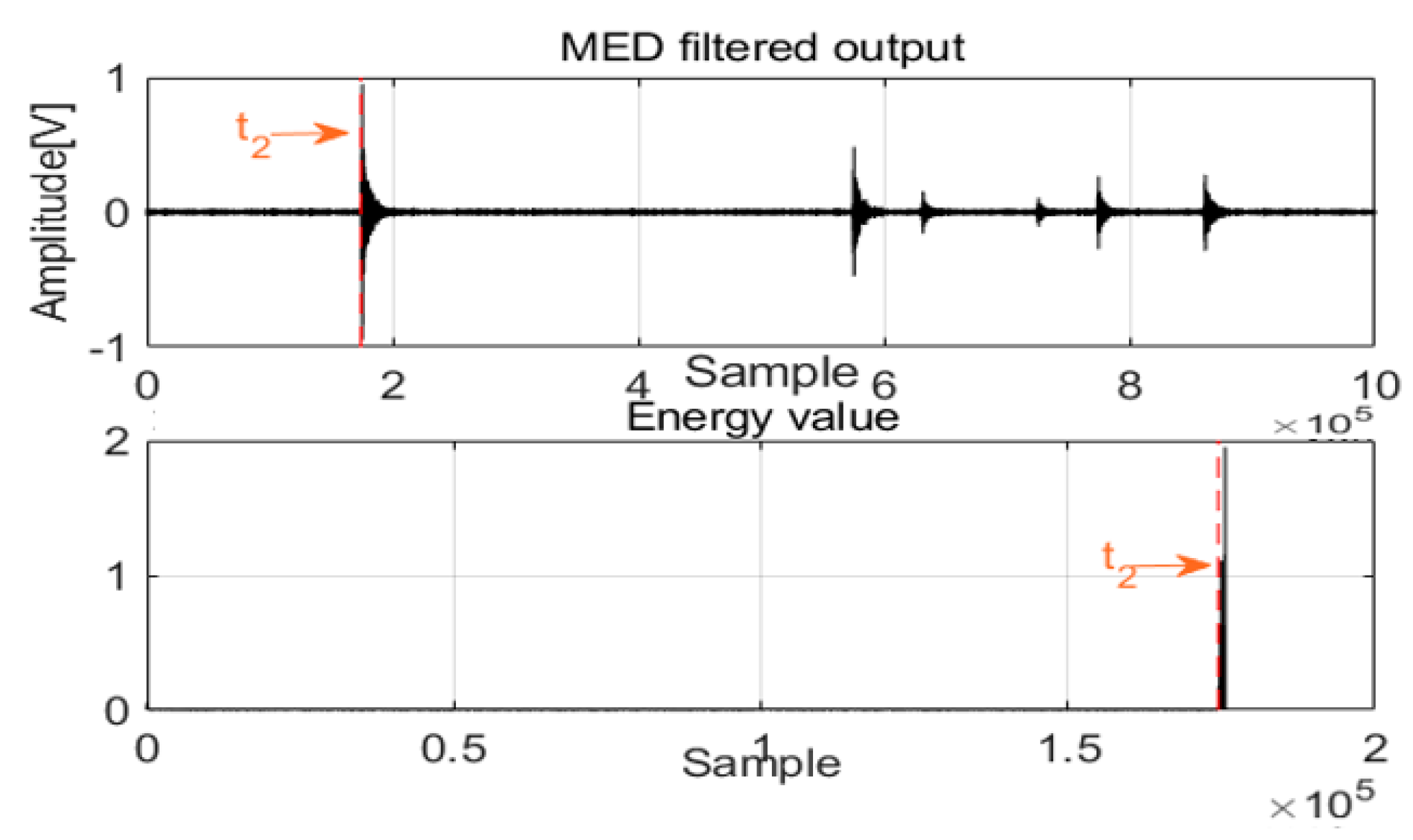
- After filter processing, the first arrival time t is detected from denoising signals by the new method based on damping frequency energy. Before time t, the energy value is zero or near zero; however, at time t, the energy value is greater than zero, and it is the time that we want to get for acoustic waves.
- (3)
- Finally, the leak is localized using Equation (11). This allows for enactment of measures to be initiated to protect the pipelines.
4. Experiment
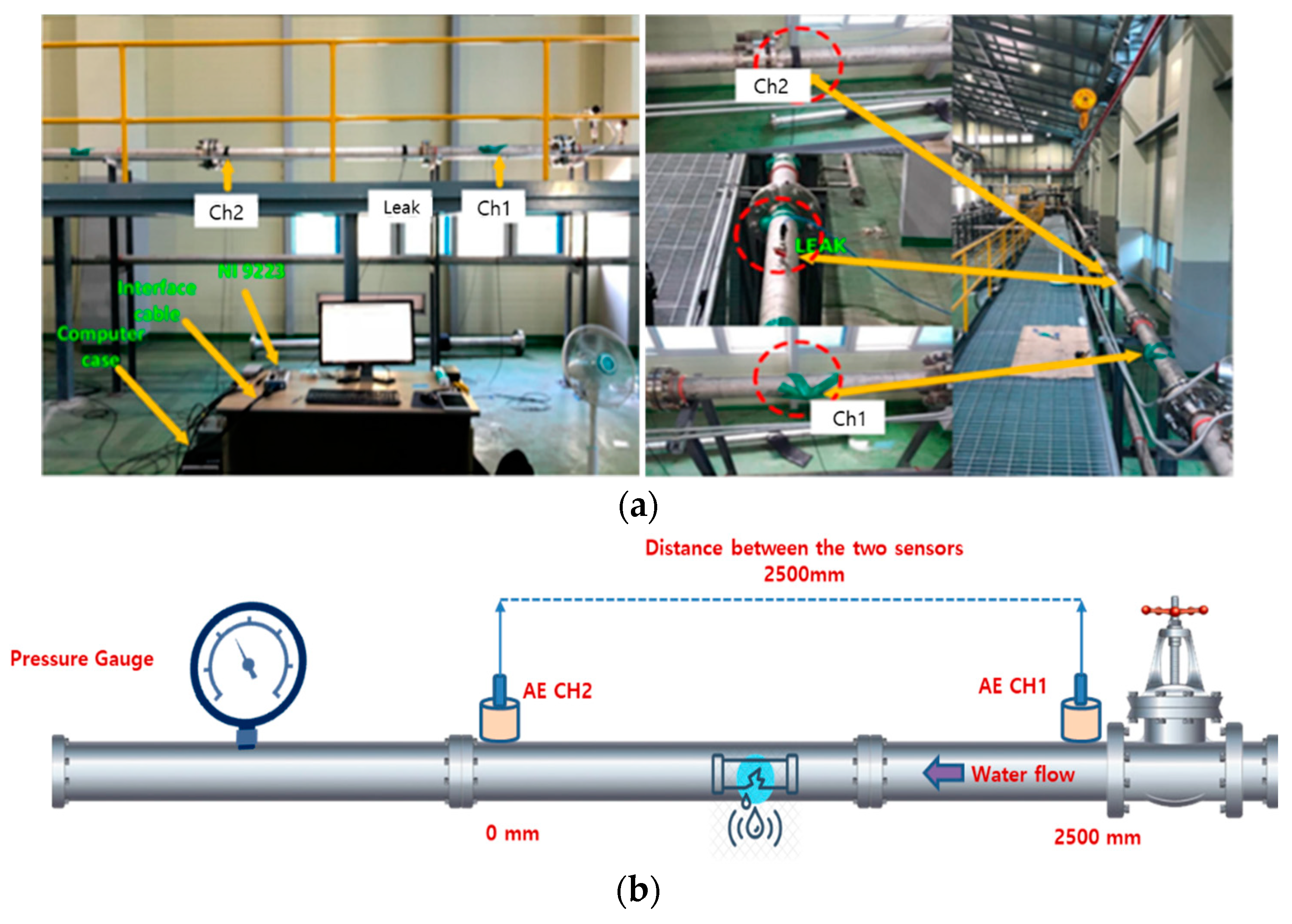
4.1. Experiment Setup
4.2. Results and Discussion
5. Conclusions
- (1)
- Two sensors are installed at each end of the industrial pipeline to collect AE signals from each channel. Collected AE signals include environment noises, which prevents intelligent analysis of leak localization. To address this issue, MED is used with the maximization kurtosis norm of acoustic signals to remove the noise and extract informative feature signals.
- (2)
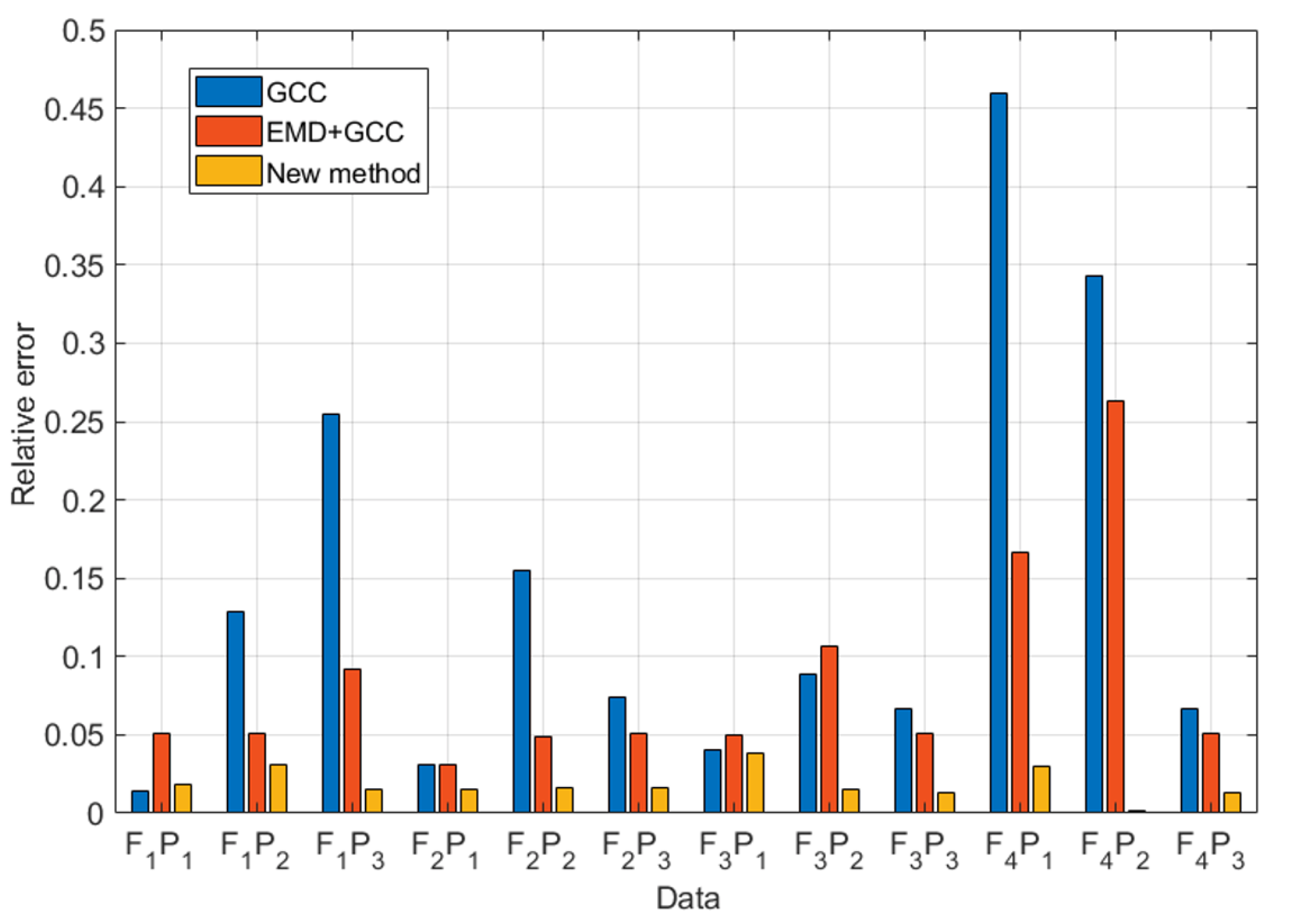
- The damping frequency energy based on the dynamic differential equation with damping term was designed to extract important energy information with frequency, and a smooth envelope over time for feature signals was then produced. Zero crossing can track the arrival time through envelope changes and detect the time difference of AE waves from two channels, combining them with velocity to localize the leak. Compared with existing methods, the proposed approach provides better leak localization over the conventional GCC and EMD-GCC methods.
- (3)
- As industrial pipelines operate in various environment noises and are influenced by internal factors, intelligent analysis of leak localization is required. To address these issues, we will consider additional parameters in the proposed method and perform more experiments for the accurate leak localization.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Che, T.C.; Duan, H.F.; Lee, P.J. Transient wave-based methods for anomaly detection in fluid pipes: A review. Mech. Syst. Signal Process. 2021, 160, 107874. [Google Scholar] [CrossRef]
- Hu, Z.; Tariq, S.; Zayed, T. A comprehensive review of acoustic based leak localization method in pressurized pipelines. Mech. Syst. Signal Process. 2021, 161, 107994. [Google Scholar] [CrossRef]
- Lalam, N.; Lu, P.; Venketeswaran, A.; Buric, M. Pipeline Monitoring Using Highly Sensitive Vibration Sensor Based on Fiber Ring Cavity Laser. Sensors 2021, 21, 2078. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Li, Y.; Fang, L.; Xu, M. New leak-localization approaches for gas pipelines using acoustic waves. Measurement 2019, 134, 54–65. [Google Scholar] [CrossRef]
- Xu, M.; Tao, W. Study on gas leakage localization method based on ultrasonic sensor area array. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM) IEEE, Munich, Germany, 3–7 July 2017. [Google Scholar]
- Kostas, A. Performance assessment of correlation methods for the velocity estimation of vibro-acoustic signals propagating in fluid-filled pipelines. In Proceedings of the 2021 10th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 5–7 July 2021. [Google Scholar]
- Xun, W.; Waqar, M.; Yan, H.-C.; Louati, M.; Ghidaoui, M.S.; Lee, P.J.; Meniconi, S.; Brunone, B.; Karney, B. Pipeline leak localization using matched-field processing incorporating prior information of modeling error. Mech. Syst. Signal Process. 2020, 143, 106849. [Google Scholar]
- Gao, Y.; Brennan, M.; Joseph, P.; Muggleton, J.; Hunaidi, O. A model of the correlation function of leak noise in buried plastic pipes. J. Sound Vib. 2004, 277, 133–148. [Google Scholar] [CrossRef]
- Nicola, M.; Nicola, C.-I.; Vintilă, A.; Hurezeanu, I.; Duț, M. Pipeline Leakage Detection by Means of Acoustic Emission Technique Using Cross-Correlation Function. J. Mech. Eng. Auto 2018, 8, 59–67. [Google Scholar]
- Quy, T.B.; Kim, J.M. Leak Localization in Industrial-Fluid Pipelines Based on Acoustic Emission Burst Monitoring. Measurement 2019, 151, 107150. [Google Scholar] [CrossRef]
- Lin, C.; Liu, Y.; Kong, F.; He, N. Acoustic Source Localization Based on Generalized Cross-Correlation Time-Delay Estimation. Procedia Eng. 2011, 15, 4912–4919. [Google Scholar]
- Tai, J. An adaptive localization method of simultaneous two acoustic emission sources based on energy filtering algorithm for coupled array signal. Mech. Syst. Signal Process. 2021, 154, 107557. [Google Scholar] [CrossRef]
- Soave, E.; D’Elia, G.; Cocconcelli, M.; Battarra, M. Blind deconvolution criterion based on Fourier–Bessel series expansion for rolling element bearing diagnostics. Mech. Syst. Signal Process. 2022, 169, 108588. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. Application of the EEMD method to rotor fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2009, 23, 1327–1338. [Google Scholar] [CrossRef]
- Chai, M.; Gao, Z.; Li, Y.; Zhang, Z.; Duan, Q.; Chen, R. An approach for identifying corrosion damage from acoustic emission signals using ensemble empirical mode decomposition and linear discriminant analysis. Meas. Sci. Technol. 2022, 33, 065018. [Google Scholar] [CrossRef]
- Zhang, J.; Ruqiang, Y.; Gao, R.X.; Feng, Z. Performance enhancement of ensemble empirical mode decomposition. Mech. Syst. Signal Process. 2010, 24, 2104–2123. [Google Scholar] [CrossRef]
- McDonald, G.L.; Zhao, Q. Multipoint Optimal Minimum Entropy Deconvolution and Convolution Fix: Application to vibration fault detection. Mech. Syst. Signal Process. 2016, 82, 461–477. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.; Endo, H. The enhancement of fault detection and diagnosis in rolling element bearings using minimum entropy deconvolution combined with spectral kurtosis. Mech. Syst. Signal Process. 2007, 21, 2616–2633. [Google Scholar] [CrossRef]
- Lei, Y. A BiLSTM Based Pipeline Leak Detection and Disturbance Assisted Localization Method. IEEE Sens. J. 2022, 22, 611–620. [Google Scholar]
- Sun, J.; Wen, J. Target location method for pipeline pre-warning system based on HHT and time difference of arrival. Measurement 2013, 46, 2716–2725. [Google Scholar] [CrossRef]
- Quy, T.B.; Kim, J.M. Crack detection and localization in a fluid pipeline based on acoustic emission signals—ScienceDirect. Mech. Syst. Signal Process. 2021, 150, 107254. [Google Scholar] [CrossRef]
- Shehadeh, M.; Steel, J.A.; Reuben, R.L. Acoustic Emission Source Location for Steel Pipe and Pipeline Applications: The Role of Arrival Time Estimation. ARCHIVE Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 2006, 220, 121–133. [Google Scholar] [CrossRef]
- Wang, K.; Liu, Z.; Qian, X.; He, Y. Dynamic characteristics and damage recognition of blast-induced ground vibration for natural gas transmission pipeline and its integrated systems. Mech. Syst. Signal Process. 2020, 136, 106472. [Google Scholar] [CrossRef]
- Kalkan, E. An automatic P-phase arrival-time picker. Bull. Seismol. Soc. Am. 2016, 106, 971–986. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Parameter | Value |
|---|---|---|
| 1 | Peak sensitivity, ref [V/(m/s)] | 109 [dB] |
| 2 | Peak sensitivity, ref [V/μbar] | −22 [dB] |
| 3 | Operating frequency range | 50–400 [kHz] |
| 4 | Resonant frequency, ref [V/(m/s)] | 75 [kHz] |
| 5 | Resonant frequency, ref [V/μbar] | 150 [kHz] |
| 6 | Directionality | ±1.5 [db] |
| 7 | Temperature range | −35 to 70 [°C] |
| No | Quantity | Detail |
|---|---|---|
| 1 | Location of Sensor 1 (d1) | 2600 [mm] |
| 2 | Location of Sensor 2 (d2) | 100 [mm] |
| 3 | Location of leak (d) | 900 [mm] |
| 4 | Thickness of pipelines | 6.02 [mm] |
| 5 | Outer diameter of pipelines | 114.3 [mm] |
| 6 | Material of pipelines | Stainless steel 304 |
| 7 | Wave velocity (C) | 1,500,000 [mm/s] |
| Data | GCC [mm] | GCC + EMD [mm] | Proposed Method [mm] |
|---|---|---|---|
| F1P1 | 865 | 1027 | 854 |
| F1P2 | 1222 | 1027 | 977 |
| F1P3 | 1536 | 1131 | 939 |
| F2P1 | 978 | 978 | 861 |
| F2P2 | 512 | 1023 | 858 |
| F2P3 | 1086 | 1027 | 859 |
| F3P1 | 798 | 1026 | 997 |
| F3P2 | 1122 | 633 | 938 |
| F3P3 | 1067 | 1027 | 932 |
| F4P1 | 2048 | 1316 | 974 |
| F4P2 | 1758 | 1559 | 903 |
| F4P3 | 1067 | 1027 | 867 |
| Data | GCC [%] | GCC + EMD [%] | Proposed Method [%] |
|---|---|---|---|
| F1P1 | 1.4 | 5.08 | 1.84 |
| F1P2 | 12.88 | 5.08 | 3.08 |
| F1P3 | 25.44 | 9.24 | 1.56 |
| F2P1 | 3.12 | 3.12 | 1.56 |
| F2P2 | 15.52 | 4.92 | 1.68 |
| F2P3 | 7.44 | 5.08 | 1.64 |
| F3P1 | 4.08 | 5.04 | 3.88 |
| F3P2 | 8.88 | 10.68 | 1.52 |
| F3P3 | 6.68 | 5.08 | 1.28 |
| F4P1 | 45.92 | 16.64 | 2.96 |
| F4P2 | 34.32 | 26.36 | 0.12 |
| F4P3 | 6.68 | 5.08 | 1.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Piltan, F.; Kim, J.-M. A Hybrid Leak Localization Approach Using Acoustic Emission for Industrial Pipelines. Sensors 2022, 22, 3963. https://doi.org/10.3390/s22103963
Gao Y, Piltan F, Kim J-M. A Hybrid Leak Localization Approach Using Acoustic Emission for Industrial Pipelines. Sensors. 2022; 22(10):3963. https://doi.org/10.3390/s22103963
Chicago/Turabian StyleGao, Yangde, Farzin Piltan, and Jong-Myon Kim. 2022. "A Hybrid Leak Localization Approach Using Acoustic Emission for Industrial Pipelines" Sensors 22, no. 10: 3963. https://doi.org/10.3390/s22103963
APA StyleGao, Y., Piltan, F., & Kim, J. -M. (2022). A Hybrid Leak Localization Approach Using Acoustic Emission for Industrial Pipelines. Sensors, 22(10), 3963. https://doi.org/10.3390/s22103963