1. Introduction
An actuator is a vital component of any physical system enabling movements by converting an energy source into another, primarily electrical, air, or hydraulic energy, into mechanical force [
1,
2] to modify the current system’s state. Some major applications include the automotive industry, furniture-ergonomics, automation, industrial machinery, maritime applications, the medical industry, and renewable energy systems. Various types of actuators are in use (as per the power sources used) such as electrical actuators [
3], hydraulic actuators [
4], pneumatic actuators [
5], mechanical actuators, and a combination of these such as electro-hydraulic [
6], electro-pneumatic [
7], electro-mechanical [
8], self driven thermo-mechanical [
9], etc. An electric actuator creates a load movement or an action requiring a force such as clamping, using an electric motor to create the desired force, converting electricity into kinetic energy to automate valves, or damper actions using precise flow control [
10]. Electric motors may work on AC or DC supplies depending on the requirements of the application, limit switches, brake mechanisms, resolvers, temperature sensors, etc. The desired force is generated from the motor’s torque capability and automates industrial valves, process plants, flow control, thermal power plants, irrigation systems, etc. [
11].
Renewable energy plays a pivotal role in tackling climate change by reducing greenhouse gas emissions and fossil fuel use. Energy conversion systems driven by actuators help ensure optimal conversion while transforming renewable sources into valuable forms. Rotary to linear motion is achievable using a mechanical transmission unit, called linear motion actuators, which are better in accuracy than rotary actuators, compact in size, and easy to use in many applications such as solar tracking systems [
12], where solar panels can track the sun’s apparent motion; solar furnace systems [
13], where the motion required to control the sun-rays by moving shutters; solar heater systems [
14], where sun rays are concentrated on oil pipes (called active area) placed over the parabolic solar panels; solar cleaning systems [
15,
16], where two motions are performed (viz.,
x-axis and
y-axis motion) to clean the whole solar panel; small-scale wind systems [
17], where actuators are used as protection devices in high wind speeds; wave systems [
1,
2,
18,
19], where actuators are used in the conversion of wave motion to linear and rotary motion for energy generation; and bio-energy systems [
20,
21,
22,
23], where actuators automate the operation of geologically distributed systems.
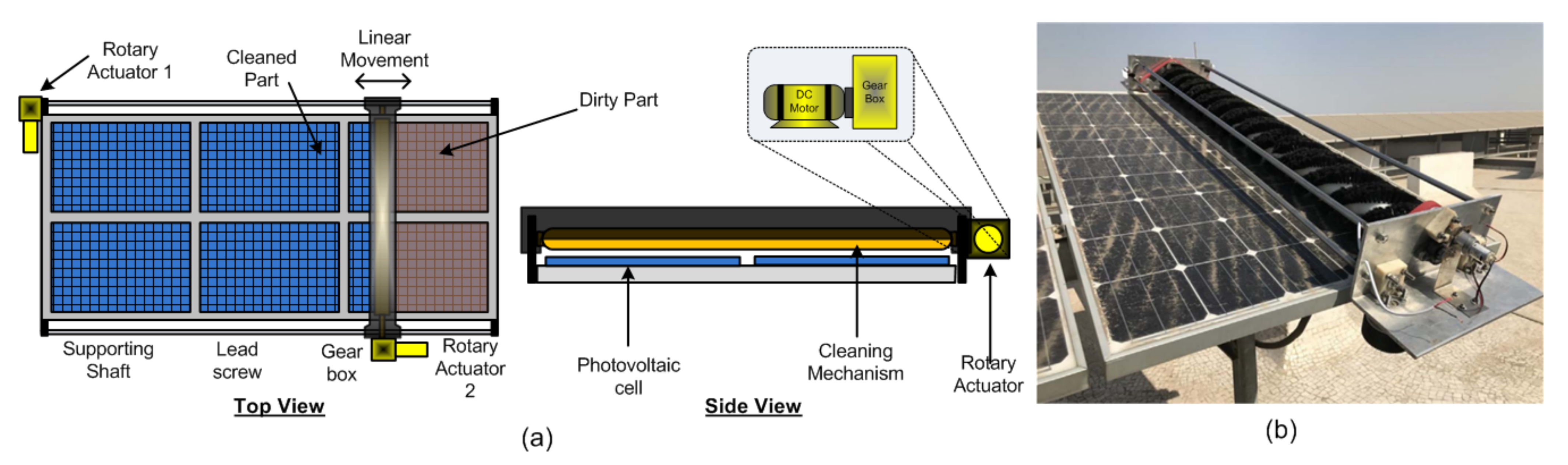
Energy optimization is achievable by increasing energy generation or reducing energy consumption. In solar panel cleaning, Williams et al. [
15] use piezoceramic actuators for self-cleaning operation. The results show that dust moves away from high to low vibration velocity. The convectional solar panel’s mechanical cleaning structure is called a gantry structure [
24] and is operated by two rotary actuators. Using telescopic actuators offers the possibility of reducing the use of one rotary actuator for reduced overall cost and energy consumption. In solar furnace systems [
25], instead of rotary actuators by applying linear actuators, one may neglect the mechanical dead zone for decreased operation time due to the quick response increased testing quality. For solar tree applications, a 2DOF spherical actuator [
26] is more beneficial than a linear actuator. There are two advantages: less space required and a mechanical latch arrangement which uses reduced power while moving. Such an appropriate selection of actuator ensures an optimal system operation.
Actuators are mainly classifiable into active and passive actuators. The active actuators need an electric energy source for functioning. In contrast, passive actuators do not require a source and function based on natural energy, such as thermal expansion material, and energy stored in the spring [
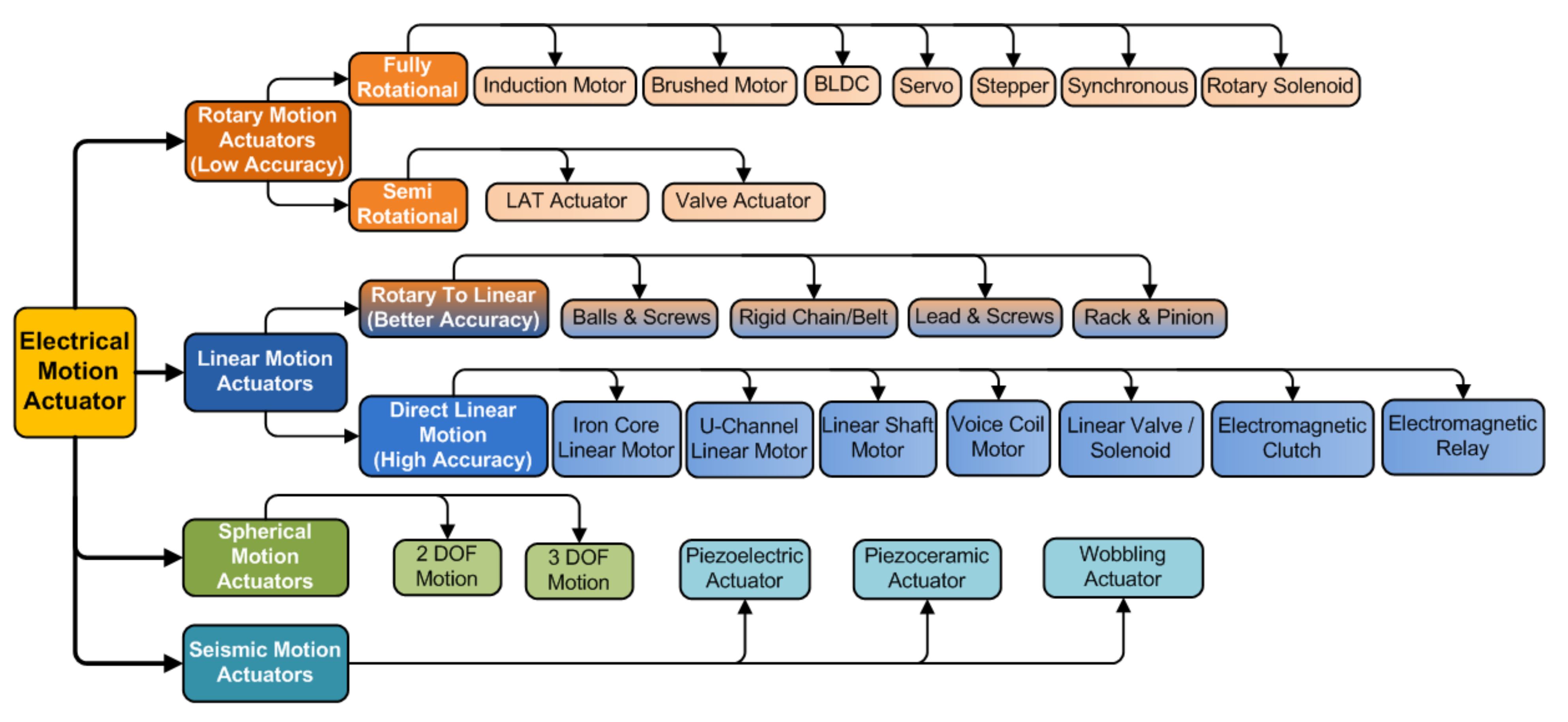
27]. Various required motions are circular, rotational, oscillatory (seismic), and rectilinear. Therefore, electric actuators are classified according to their motion, degree of freedom (DOF), and excitation sources for particular functional motion. As per motion, actuators are rotary actuators, linear actuators, and a new one called a spherical actuator with multiple degrees of freedom [
26]. Linear motion actuators are split into two categories: rotary-to-linear (hybrid motion) actuators involving mechanical transmission units (also called electromagnetically linear actuators as shown in
Figure 1) and direct linear motion ones not requiring mechanical transmissions units.
Actuators are used in renewable energy sources such as solar tracking applications to drive solar panels, solar dishes, heliostats, and solar cookers moving towards the sun throughout the day [
28]. Solar water pumping applications use linear actuators in a water pump system [
29], and solar tracking, or cooker, applications use actuators (motors or shape memory alloys) to drive the rotation of panels towards the sun throughout the day at a rate of 15
/h [
27,
30]. Depending on the temperature, certain materials in a thermo-mechanical actuator help control the collector’s angle of inclination to face the sun and provide increased production of about 39% compared to a fixed system. In addition, there are some bioenergy applications, where rotary actuators are used for agricultural machinery and the automation of geographically distributed biogas systems; portable wind energy applications [
31] with actuator-controlled over-speeding; wave energy applications, where actuators are used in power-generation purposes [
32]; smart grid or microgrid environment [
33], where actuators control power generation and consumption; and geothermal power plants with electric valve actuators.
Rotary (also called electromechanical rotary) actuators help move large loads in angular increments. They include electrical motors with gearboxes used to change the direction of rotation or achieve the desired torque and speed with the desired adjustable rotation angle. Examples of the rotary actuators are induction motors, DC motors (brushed and brushless), synchronous motors, and special motors such as stepper and servo motors. Motors’ selection factors for actuation are speed, output torque, type of supply required, and motor duty cycle. However, induction motors, which give almost synchronous speed, are effective with high power requirements. Due to the low inertia, servo motor rotors working on AC or DC supply and controlled through pulse width modulation can quickly start and stop and are used to position mechanical parts precisely. Such precise motion control is needed in CNC machines and production assembly lines. In addition, DC servo, DC brushed, and BLDC motors are economical and less complex actuation devices. Unlike servos, a stepper motor that divides the rotary motion into equal small steps can provide 360-degree continuous rotation and is helpful for high torque output and high accuracy at low-cost [
34]. However, due to electrical (cogging) and mechanical (dead zone) nonlinearities [
35], these rotary actuators are relatively less efficient and have lower accuracy. Whenever we may face motor concussion problem [
36], accuracy is improved by using special motors such as stepper motors and servo motors, which still face mechanical nonlinearities and, thus, low performance. In mechatronic systems, electric rotary actuators find extensive use.
A rotary solenoid is more suitable for small rotations and low torque applications than a costly and complex control circuitry stepper motor. It comprises an electromagnetic coil operated on a DC supply, rotor, and torsion spring. The change in supply polarity is easily handled in the direction of rotation, providing a meager angle rotational movement around a fixed axis (usually ⩽
). Typical rotary solenoids have bi-stable positions that do not require power to hold either end position, minimizing energy consumption. It can drive camera shutters and mirror deflections, fluid/gas valves, the actuation of indicating instruments, application areas such as the packaging industry, medical devices, apparatus construction, and food technology for interlocking purposes. Rotary-to-linear actuators (also called electro-mechanical linear actuators) comprises electric motors and mechanical transmission elements. The rotational motion converts into linear motion using mechanical transmission elements, such as the ball and screw mechanism, the lead screw mechanism, the rack and pinion mechanism, the belt and pulley mechanism, and rigid chains. Such elements slow down electric rotations, thereby increasing torque such that the load on the transmission part moves smoothly. The ball and screw are made out of a cylinder to allow the re-circulation of the balls, causing linear movement, but are used for distinct purposes and are not interchangeable [
37].
Unlike rotary to linear ones, direct linear motion actuators have no transmission elements and provide high accuracy, resolution, and speed. There are various types, viz., iron core linear motors, U-channel linear motors, linear shaft motors, voice coil motors, linear motion solenoids, screw-type linear piezoelectric actuators [
38], and electromagnetic clutches. The stator and forcer (called rotor), with a permanent magnet and electromagnetic coils, respectively, create linear force. However, the iron core brings cogging and eddy currents, heat, magnetic saturation, and lateral forces. U-channel direct linear motor eliminates such disadvantages, providing increased force through an additional permanent magnet on the opposite side for a double-sided configuration, with electromagnetic coils in an epoxy-mounted non-ferrous forcer aluminum plate. The absence of a magnetic core eliminates cogging, but reduces heat dissipation, and a double-sided configuration increases cost. Although they do not generate the same forces as an iron core motor and U-channel linear motors, they do not have to deal with the additional issues with that design. Voice coil actuators, working on the principle of Lorentz force, are a direct drive mechanism that allows for excellent fine-positioning over small movements.
An electromagnetic device called a “Linear Solenoid” turns electrical energy into a mechanical pushing or pulling force or motion for rapid ON and OFF operation and mainly comprises an electromagnetic coil, a plunger (armature), and a spring. When the coil energizes, the spring is compressed for the valve to open, and when the coil de-energizes, the spring moves downward to close the valve and control fluid/airflow as a solenoid valve. However, the disadvantages are that there are only two available positions, i.e., fully open or closed, generating a limited linear force for electrically opening doors and latches. Electric (also called electromagnetic) clutches have an electric actuation between two rotational gears (drive/input and driven/output) for mechanical transmission of torque through linear motion, i.e., operate electrically and transmit torque mechanically. The passage of a current through the clutch coil makes it an electromagnet producing magnetic lines of flux [
39]. Although mainly used in biogas automation [
20], clutches are also used in conveyor drives, packaging machinery, and factory automation. Apart from linear and rotary motion, the new spherical motion actuators [
26] are multi-degree-of-freedom voice coil devices with a spherical-shaped stator, two coils, a ball-shaped rotor, and multiple permanent magnets (a plurality of magnets) [
40] applied to robot eyes, joints, and solar trees.
This comprehensive literature survey focuses exclusively on renewable applications with electrical actuators. Particular actuators find a place in multiple renewable energy systems, while others have only specific or limited usage. Furthermore, there are certain advantages and disadvantages (provided subsequently in each Section) concerning actuator motion. We also suggest some alternative solutions for conventional actuators. However, the overall advantages of electric actuators against non-electrical actuators (such as hydraulic and pneumatic) are given as follows:
- (i)
Lower response time: Electrical actuators are directly driven without auxiliary accessories, unlike hydraulic actuators, which comprise motors, hydraulic tanks, controlling valve pipes, and cylinders, and hence are fast operating.
- (ii)
Lightweight: Compared to non-electrical actuators, electric actuators are lightweight and easy to install, with no adverse effect on system performance. The cost of overall installation and material is reduced [
15,
41].
- (iii)
Precision control: The low tolerances compared to non-electrical actuators such as gear backlash, slack, and inherent flex provide highly precise positioning [
42].
- (iv)
Compact in size: Electric actuators are compact due to their direct electromagnetic energy conversion system, and they are designed for any space and physical size [
26].
- (v)
Clean: Electrical actuators are a clean source of energy with no chance of leaking or dirty work areas [
43].
- (vi)
IoT compatible: Motion and position are easily measurable due to inbuilt rotation sensors, and encoders and easily transfer to an IoT environment [
44,
45].
The paper’s structure is as follows.
Section 2 reviews various types of electric actuators in different solar system applications such as solar tracking, furnace, heater, and solar panel cleaning.
Section 3 presents a brief review of electric actuators used in wind applications, especially miniature rooftop wind turbines and wave energy applications. Then,
Section 4 reviews actuators used in bioenergy applications, including agriculture and irrigation.
Section 5 presents important performance parameters of actuators and evolution. Finally,
Section 6 presents the conclusions and future direction.
3. Actuators in Wind Applications
A relatively low wind speed (<5 m/s) makes the deployment of conventional wind turbines in residential areas non-productive. Therefore, new topologies of generators are needed to operate favorably in such low wind speed regimes for adequate energy capture [
17]. Usually, wind-direction-oriented turbines are more efficient vis-à-vis turbines operating in winds from any direction. In addition, such small wind turbines favorably orient with a rear rudder as an effective brake for damage mitigation at high speeds. In addition, two actuators protect from higher speeds beyond a threshold voltage via unipolar control—the first is a limited-angle torque (LAT) actuator (called ON-OFF bipolar actuator) used on a 2.5 kW wind turbine with a nominal wind speed of 500 RPM (shown in
Figure 9). The second is a stepper motor actuator with a reduction gear (i.e., rotary actuator) [
82]. The actuator comprises a permanent magnet rotor mounted on two bearings—the rotor movement is limited by two dead-end pins mounted on one of the steel plates. Stator poles (with two windings connected in series) mounted on supports of the same steel type fixed to the plates’ ends together form a rigid assembly.
The nominal coil operating voltage is
V, and the threshold voltage is
V and
V. The comparator circuit measures and compares the input voltage to preset values, e.g.,
= 190 V and
= 210 V. Because the actuator does not take action between these voltage levels, the system restricts the LAT oscillation at high speed using two comparator values. On reaching the threshold voltage (high generator speed), the rotor moves between two stationary locations, furling the wind turbine. A circular torsion spring placed on the rotor shaft causes the return of the rotor to the initial position after the wind turbine deceleration. The nacelle and tail align with the wind direction for wind speeds below a certain level. As shown in
Figure 9, the LAT actuator mounted on a tail is activated when the voltage exceeds the threshold, causing the tail to rotate perpendicular to the rest of the wind turbine [
42]. With the nacelle no longer aligned in the wind direction, the blades are not driven efficiently, ensuring speed reduction. Upon the restoration of regular wind speeds, when the windings receive a reverse polarity voltage, the actuator rotor returns from
to
. The detection levels are adjusted to accommodate different applications and dynamics. The angular displacement solenoid actuators [
83] using springs provide torque at a specific desired position despite no electrical current passing through the motor. A solenoid actuator is used as an ON–OFF bipolar actuator in place of LAT. A similar controlling operation has been done with the stepper motor-based actuator. Instead of two coils as LAT, two different comparison and control circuits and one angular moment element play an important role.
Table 4 shows a comparison of actuators based on selected parameters. Such actuators are restricted to the system within rated power.
Wave power is a predictable renewable energy source that can create more electricity than wind and solar combined. Wave energy absorption from ocean waves varying in time scales and produced by wind action indirectly from solar energy [
1] is a hydrodynamic process resulting in radiation wave phenomena. However, the conversion of wave kinetic energy into smooth electric energy is difficult due to the low frequency of wave motion (~0.1 Hz), random wave, and high-force oscillations [
84]. A “smart” oscillating-body device, also called a heaving buoy, that travels freely up and down with the rise and fall of the waves converts wave motion into linear motion for the power-generation system [
18]. Linear motion is created by reacting an oscillating buoy against a fixed reference frame called deeply submerged reaction mass, as shown in
Figure 10, and it is stationary due to its heavy mass.
The reaction mass connected to the seabed through the rope ensures a fixed floated position in the sea. A linear actuator placed between the floated buoy and submerged reaction mass transfers the relative motion of these two through a rod connected between translator and floated buoy. A device called power takeoff (PTO) helps the rod’s linear motion (up and down) to convert into usable power [
19]. A piston pump device (such as a hydraulic drive or mechanical drive), air or water turbines, rotating electrical generator, or linear electrical generator can serve as a power takeoff device (PTO) [
2]. The piston pump supplies high-pressure water to a hydraulic turbine [
1], where linear motion converts into rotating motion through water turbines placed onshore. When a rotating electrical generator is available as a PTO, the actuator first converts the linear motion into rotational motion so that the rotating generator generates electricity. For offshore systems, the rotating generator is in the PTO itself.
Figure 10 shows the enlarged view of the cross-section of a linear generator that generates electrical power through linear actuation. It has two dead-end stop springs and stator electromagnetic coils placed in the peripheral of the cylindrical body of the actuator. A translator with a solid permanent magnet providing magnetic flux inside the generator can freely move if vertically placed at the center. The relative motion of the buoy and the reaction mass is directly transferred through the rod to the translator for electricity generation through linear motion and the principle of electromagnetic induction.
Actuators used in wave energy conversion (WEC) systems are categorized into oscillating water columns (OWCs) and oscillating body systems or wave-activated body systems.
Figure 10 shows the second category along with a linear PTO mechanism. This type of motion conversion system (actuator) and PTO device is essential in the perspective of wave power conversion efficiency. Aderinto et al. [
85] explained detailed PTO types, scales, and efficiencies, among which were the efficiencies of five different combinations of actuators and PTO devices, and the results of their numerical simulation with computational fluid dynamics (CFD) are shown in
Table 5. The direct-drive linear generator system with an oscillating buoy shows 95% efficiency, which is the highest compared to others. Except for linear generators, all other PTOs have losses in their motion conversion process, but in linear generators, no motion conversion is required and, therefore, comes with higher efficiency.
Rahman et al. [
86] reported that PTOs, which are also built of piezoelectric actuators, are used to produce a significant quantity of electrical power from the ocean. Therefore, energy converters can be used to power applications that function in the ocean, such as various electrical sensing elements, floating harbors, robotics, etc. Wave energy converters (WECs) can improve their energy conversion efficiency by including several types of piezoelectric materials. Experiments reveal that by straining the material with a pressure of
kPa at a frequency of 20 Hz,
W electric power with
V may be obtained using this technology.
Next, we discuss actuators used in bio energy-related systems such as agriculture, solar irrigation, biogas, biomass, etc.
4. Actuators in Bioenergy Applications
Huo et al. present a distributed control system and communication topology for safe and automatic (start/stop) regulation of biogas driven appliances such as a rice cooker, stove, and water heater, etc., configured with a ZigBee endpoint to control the relevant actuators and transmit the data [
20]. For example, a biogas rice cooker typically consists of cooking and warming switches for a three-stage operation: (1) heating with both switches pressed; (2) warm stage with cook switch lifted through a step-motor if cooking is over; and (3) the turn-off stage, with both switches lifted. The step-motor rotates at a fixed angle as commanded to press or elevate the switch. A single standard biogas stove with switches and gears controlled by a Knob’s rotation angle comes with a step-motor, an ignition circuit, and an electromagnetic clutch to turn the knob on when the rotational power of the step-motor passes through the clutch to the gear and manually when the clutch is out of power. The mechanical structure of the biogas water heater is similar to the rice cooker. Biomass (grate) combustion being a reasonable alternative to fossil fuels, it is expected to be a significant player in a sustainable future [
88] and can fire a wide range of fuels of varying moisture contents, requiring less fuel preparation and handling [
89].
Agriculture wastes (most common are wood chips and sugarcane bagasse) are the primary fuel source for biomass furnaces. These biomass grates require actuators to operate an intermittent ash removal system. Biomass-fired power plants are cogeneration facilities producing heat for process heating and electricity generation, driven by electric valve actuators for feedwater treatment, steam generation, turbine injection, flue gas cleaning, and process heating. In addition, electromagnetic actuator systems robustly driven by an induction servo motor drive (rotary actuator) are used in agricultural applications [
21]. Sontake et al. [
90] present a review of solar PV powered water pumping system with a linear actuator as shown in
Figure 11a. The system comprises a piston-type pump, a two-phase variable-reluctance linear stepper motor that works as a linear actuator, a reservoir, a pulley, and a counterweight. The enlarged view of the linear actuator provides the linear vertical motion to the piston-type pump. The solar PV array provides power supply to the control unit, converting it to a two-phase supply using converters and fed to the linear stepper motor. Due to the two-phase supply, electromagnetic coils A and B energized alternately to create downward linear motion.
For creating an upward motion, the controller changes the sequence of the excitation supply of the electromagnetic coil. Still, there is a need for a more significant up-stroke to lift water, so a counterweight is helpful. Aliyu et al. [
29] present an optimized design for a solar water pumping system, as shown in
Figure 11b, which shows a cross-section view of the cylindrical actuator, comprising an electromagnetic coil, a piston, a piston chamber, an inlet valve, an outlet valve, and a piston return spring, which provide restoring force (not shown). The inlet valve is submerged in the water by a water tank. The electromagnetic coil excited by the PV panel supply sets up a solid magnetic attractive force, causing the piston to move upwards. With the coil excitation removed, the piston returns due to the restoring force of a spring. The piston’s vertical linear (up–down) movement happens due to the magnetic field and the return-spring. On the upward stroke of the piston, water in the inlet and piston chamber is expelled towards the outlet valve into the rising main. The piston drops downward at the end of the up-stroke, closes the outlet valve, and fills water into the piston chamber via the inlet valve. Due to the non-returning valve arrangements, water flow never returns once it enters the piston chamber, providing an efficient water pumping arrangement.
Talavera et al. discussed agro-industrial and environmental fields where remote actuator devices such as valves, pumps, humidifiers to maintain consistent humidity, relay, and alarms, among others, are in use [
22] to optimize the usage of water by scheduling irrigation timings and proportions, fertilizers, and pesticides as per the state of the crop, the growth cycle, and based on available information from weather prediction systems or an on-site wireless network of sensors and actuators over an IoT platform to control the state of the process for irrigation, fertilizers, pesticides, illumination, and access control. Elsewhere, Yoo et al. describe an automated agriculture system based on an interconnected actuator network for monitoring the growth of greenhouses plants, which depend on ambient light, temperature, and humidity, through controlled illumination via a relay actuator [
91]. If an agricultural intrusion is detected, the proposed system-generates alarms in the farmer’s house [
92]. Localized (drip or trickle) irrigation applies water at low pressure (<2 bar) to a small area of the soil surface, sometimes only part of the root zone, and is widely adopted in greenhouse vegetables [
93], through hardware components such as pumps, valve actuators, sensors, pipes, tubing, and emitters. A scheme of a localized irrigation system with two-way latch-type solenoid valves with limited stroke length, two ports of water flow (inlet and outlet), and two switching states (open or closed) to start/stop the controlled water flow, which is usually in open condition so that the valve closes on power failure [
23,
94], is shown in
Figure 12.
Generally, latch-type actuators operate on a direct current (DC) supply. The selection criteria for such actuators depend on the pipe connection size, operating voltage, seal material, pressure, temperature, bore size, and more. When the coil receives supply, it becomes energized, and the movable plunger changes its state (ON or OFF).
There are many other renewable energy sources not covered in this manuscript that also deploy electric actuators. For example, the direct utilization of geothermal heat energy extracted in the form of liquid or air using a ground heat pump system and utilized as warm or hot water (in the winter season) and vice versa in the summer season, which is clean and safe, is also helpful for electricity generation and mineral production [
95]. The water circulating loops of the ground heat pump system consists of centrifugal pumps and flow controlling actuators [
96].
5. Important Performance Parameters of Actuators and Evolution
Some major performance parameters, their specifications, and applications are shown in
Table 6, which gives a summary of the actuators’ major parameters/specifications. Some of the papers do not mention specifications, so only the parameters are provided. The actuators’ drive range determines the size of the feasible solar tracking region [
49] (i.e., stroke length). In addition, the maximum rated load, maximum speed, continuous power, and system backlash are all vital performance criteria to consider when selecting linear actuators [
97].
A motor, gears, and switches make up an electric rotary actuator. In some applications, the motor speed is an important parameter, e.g., the minimum shutter traveling time is required to operate mechanical shutters of the solar furnace system. There is no significant external load on shutters except for its weight. Some applications require more significant torque than the speed of the operation: in solar tracking applications, the solar panel weight is there; in a biomass grate boiler system, a rotary valve operates against fluid pressure. In such cases, the actuator gear ratio plays a significant role. A gear train is used in electric actuators to increase motor torque and control the actuator’s output speed. Therefore, the actuator torque and range of motion should be considered while choosing an electric rotary actuator. In computerized numerical control machines where precise motion control is essential, servo motors are suitable due to low inertia, enabling quick start and stop options. In addition, a servo amplifier can modify torque and speed effortlessly.
Figure 5 has already shown a schematic diagram of an electric valve actuator that can control water circulation rate. However, some advantages, disadvantages, and their limitations are given in
Table 7.
Overheating protection is available to prevent major breakdowns. Piezoelectric actuators are a new class of actuators for active mechanical system control. Piezoelectric materials have been adapted to applications that require just small quantities of displacement, such as solar panel dust cleaning, despite the magnitudes of piezoelectric voltages, motions, or forces being modest and often requiring amplification. Therefore, the displacement, pressure, resonant frequency, and voltage applied to piezoelectric actuators are vital characteristics. Limited-angle torque actuators are especially used to protect small windmills against over-speeding. They work on a predefined voltage rating of the coil called the threshold actuator coil voltage. Therefore, the voltage and rotation angles are essential.
The electric actuator, initially only a motor with a set of gears and some mechanical torque limit switches enclosed in a box, was later coupled with some auxiliary components such as position feedback switches and over-temperature (thermostat) and over-speed protection, heater, and breather control. After that, electric actuator design improved in various hazardous locations such as oil fields, chemical plants, or gas pipelines, etc. The development of non-intrusive setups combining new and more effective electronic controls with communication protocols was the next step in increasing commissioning capabilities [
98]. Wireless actuators are simple to use, implement, and commission these days. They provide both communication and diagnostics while obviating the need for costly wiring and installation [
99]. Pneumatic actuators have long been used to control valves in power plants. The use of electric control-valve actuator technology allows for energy efficiency [
66]. There are different actuators designed for the power sector, but electric actuators provide solutions for reducing energy waste in renewable energy-producing systems efficiently [
100]. Next-generation actuators will develop with new wireless communication technologies such as the Internet of Things (IoT), 5G, and intelligent robots, which are also expected to empower the fourth industrial revolution. For instance, Blanco et al. [
101] discusses a wireless actuator network used to create an IoT-based intelligent system, called smart actuators, which accomplishes a reduction in overall energy consumption at a given time by optimizing the functioning of devices and equipment in the IoT [
102]. In addition, Llaria et al. [
103] apply wireless actuators [
104] for intelligent management techniques in a microgrid environment. Junior et al. [
105] describe sensors used for management of energy generated by distributed renewable plants.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}