
Proposal of an Alpine Skiing Kinematic Analysis with the Aid of Miniaturized Monitoring Sensors, a Pilot Study



Abstract
:1. Introduction
2. Materials and Methods
2.1. Measurements
2.2. Data Analysis
- 1.
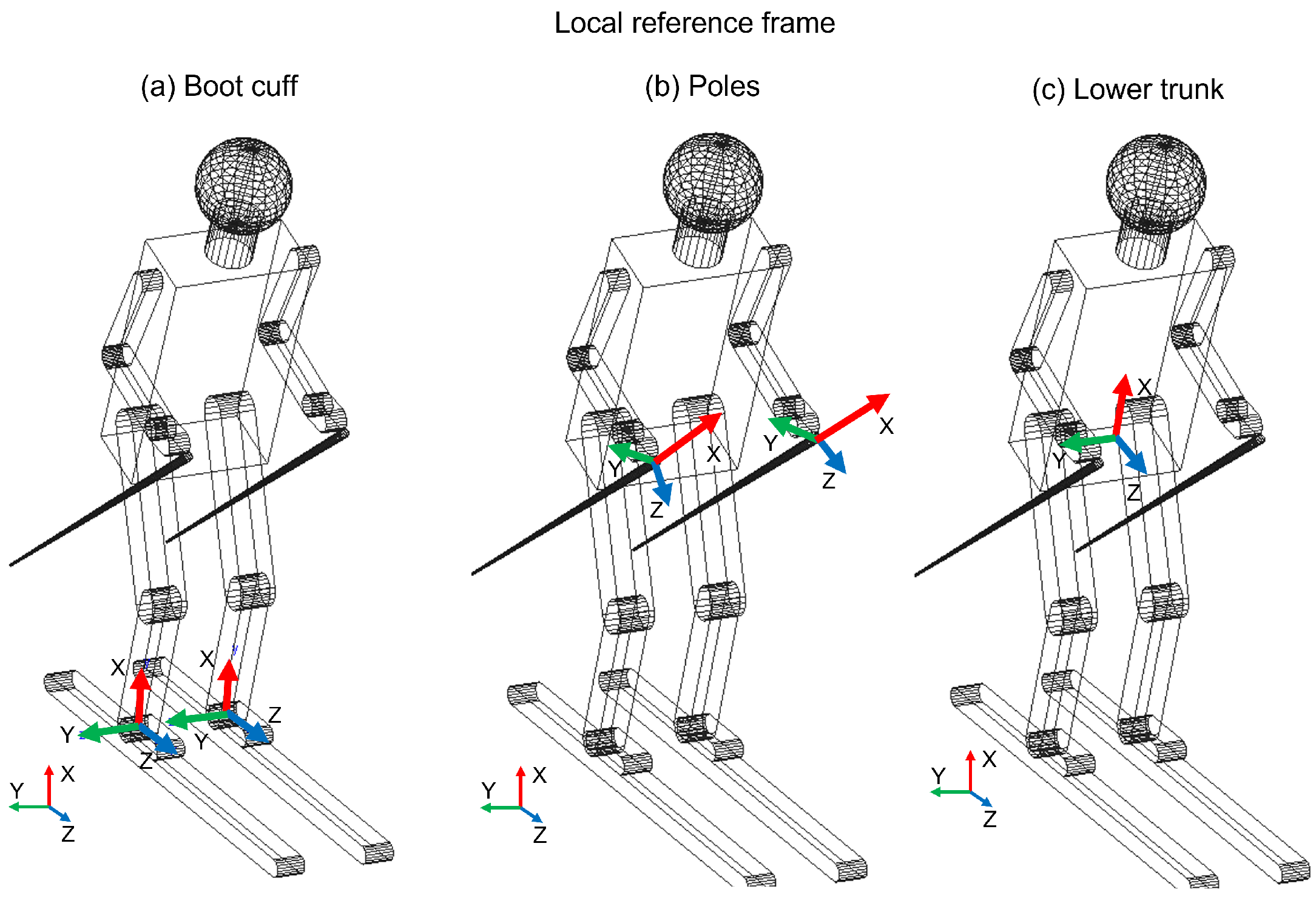
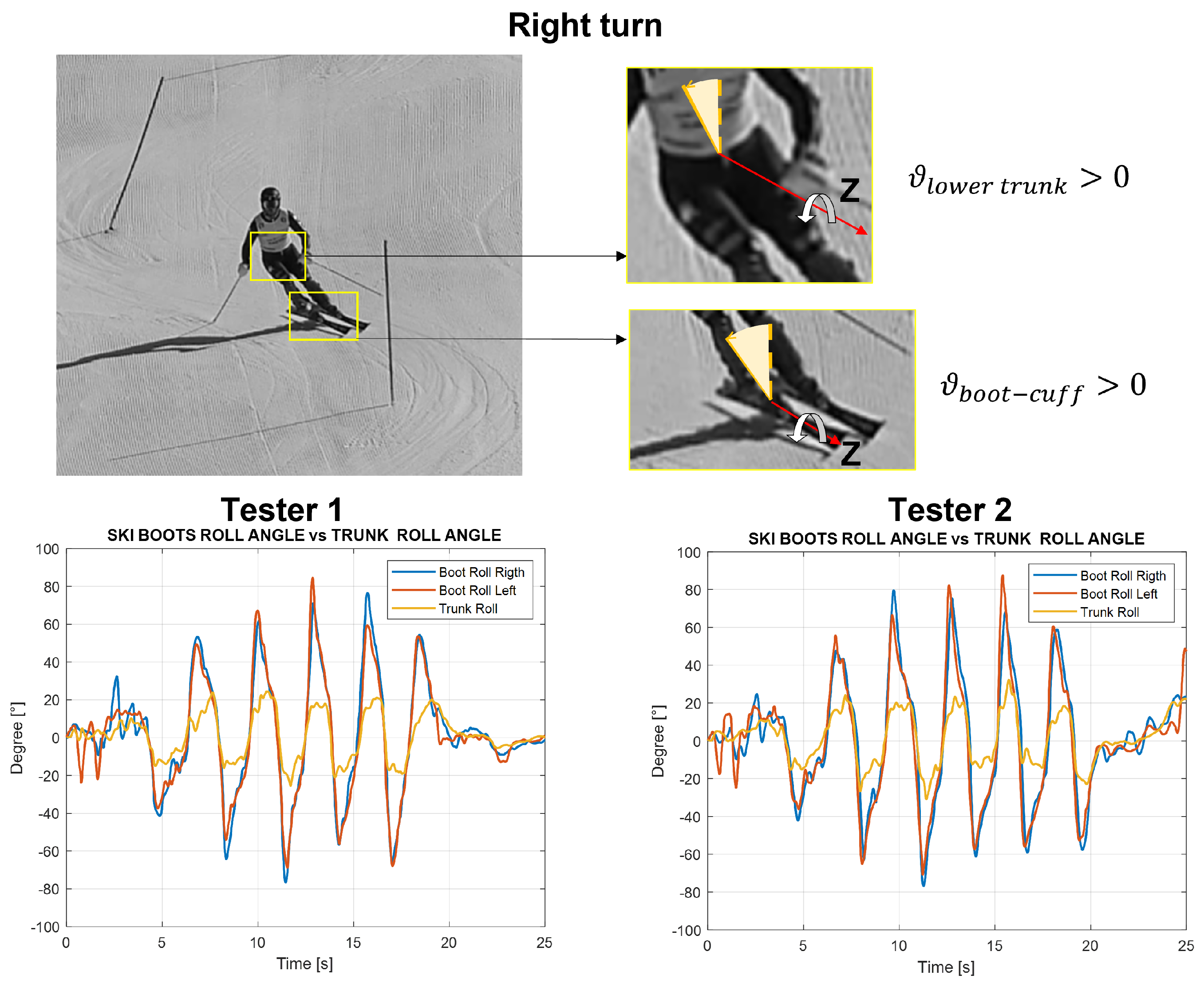
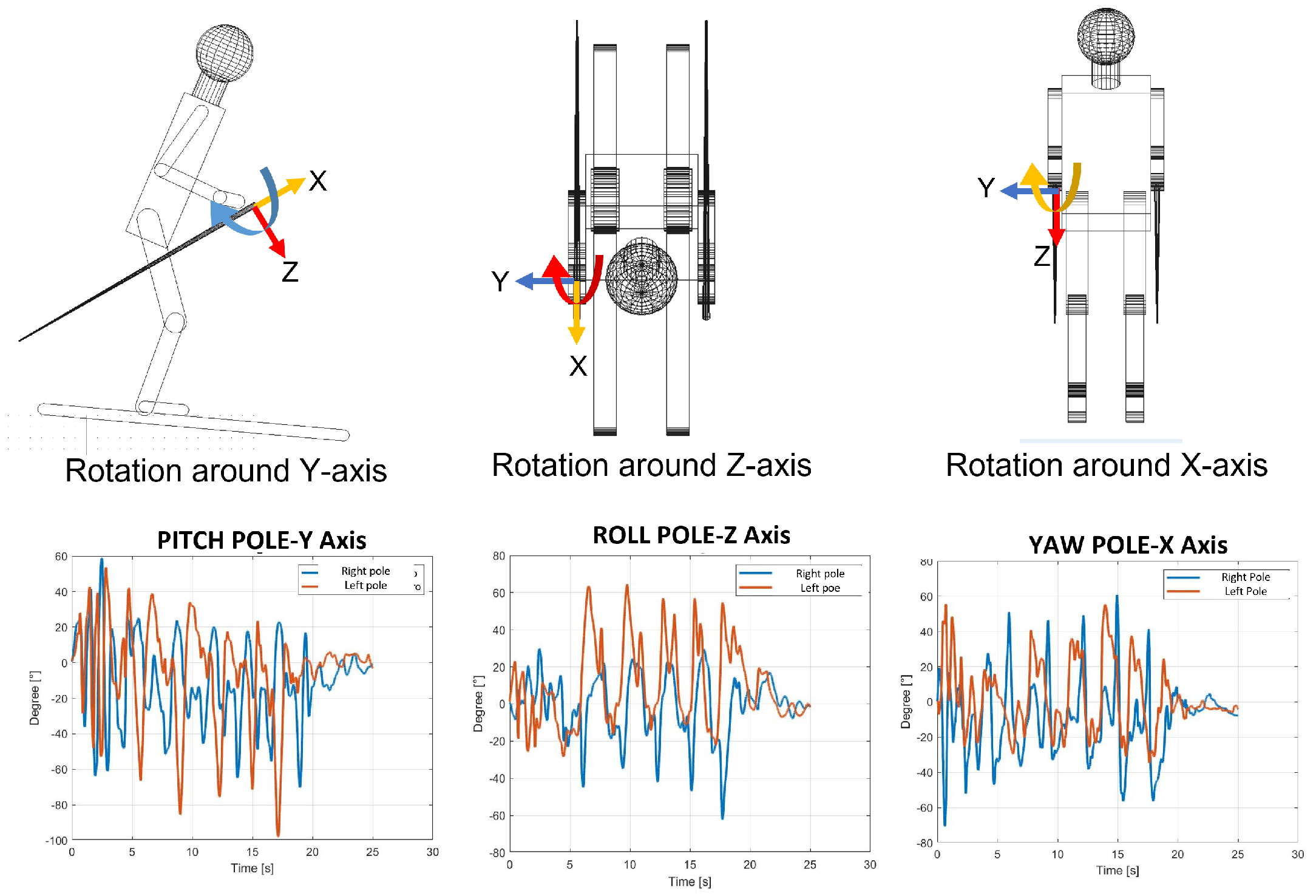
- The lateral inclination of the boot cuff and the lower trunk, shown in Figure 3, was evaluated with the roll. This represents the typical movement of the skier and can also be considered as an index of the athlete’s abilities. The rotation of the pole around the z axis represents the rotation of the pole in the traversal plane, as is visible in Figure 4.
- 2.
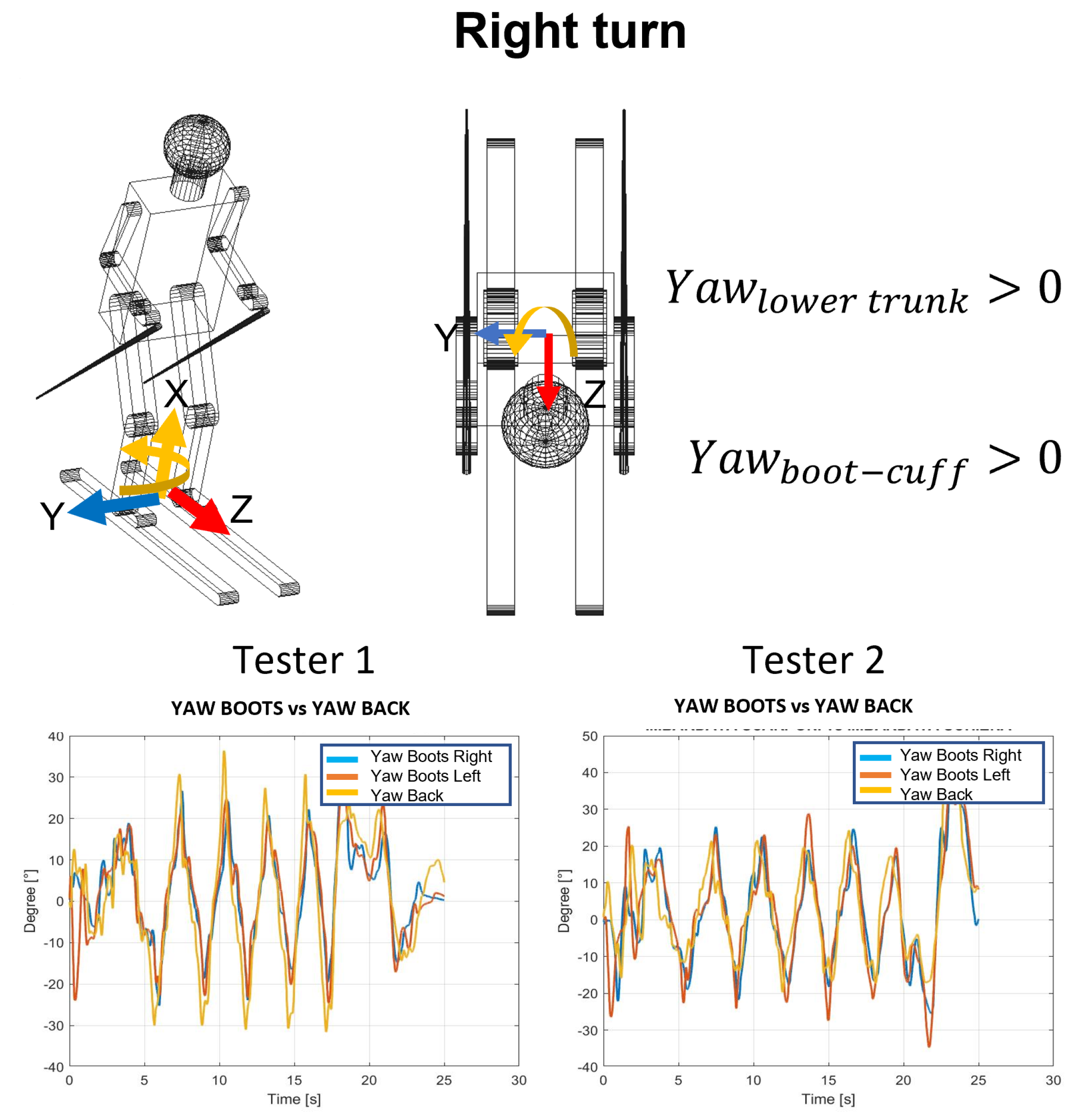
- The yaw angle for boot cuff and lower trunk represents the direction of the ski boot and skies during the ski run and it is directly connected with the trajectory performed. The rotation of the pole around the x axis is expressed by the yaw.
- 3.
- With the pitch angle, we measure an angle of a moving part of the ski boot with different stiffness regarding discipline and type of boots. The lower trunk indicates inversion or eversion. In [35], pitch angles varying up to 10° were experimentally observed. This variation changes based on the type of ski boots and on the level of the skier. For agonist skiers, such as the ones tested during the work presented in this paper, the pitch angle variation is reduced. So, in this work, due to the high level of the skier and to the comparison developed, this parameter was neglected. This consideration is not applicable for the poles because their local reference frame is decoupled from the slope and the pitch can be evaluated.
3. Results
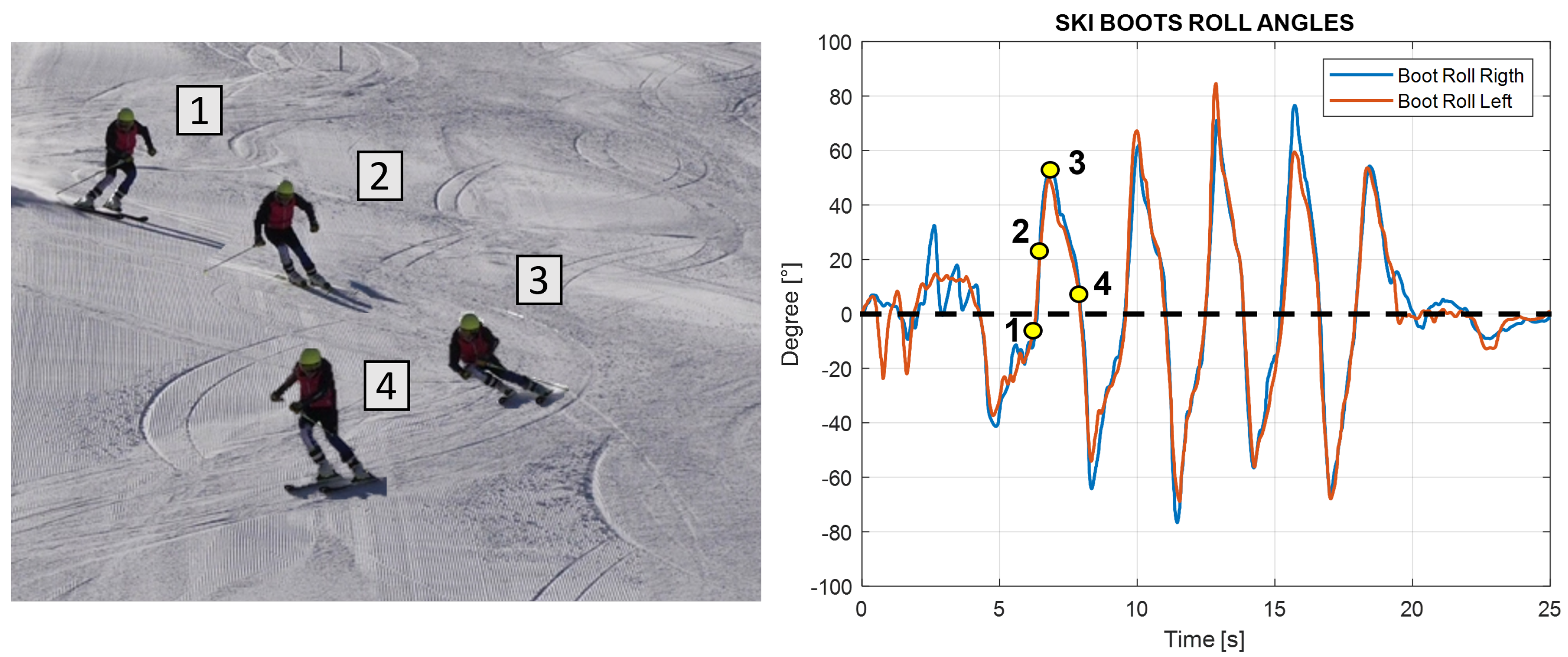
- Turn definition: The beginning and the end of the turn can be defined starting from the edge change visible in the boot roll angle graph. The peaks in this graph represent the maximum lateral inclination of the ski boot during a turn; this occurs in the central phase of the turn when the roll curve change sign corresponds to the edge change and corresponds to the start of the consecutive turn. Hence, each turn can be calculated using zero as a reference, as shown in Figure 7 below.
- Average time of turns: For each turn, it is possible to compute the time from the start of the turn and its end and compute the average for all of them. This time can be computed considering the starting point when the boot cuff yaw angle is at a maximum, which indicates the edge change as the start of a turn. This yaw angle theoretically should coincide with the zero of the roll angle of the boot cuff. The turns are easily visible in the roll angle graph. The angle value oscillates around the zero mean value; the peaks instead represent the maximum inclination of the skier during the turn. Around the zero value, the ski boot has no inclination and the skier is between two turns; at the peak values, the skier is in the middle of the turn. To know the finish time, the number of peaks in the roll angles plot is counted and compared with the number of gates to validate it.
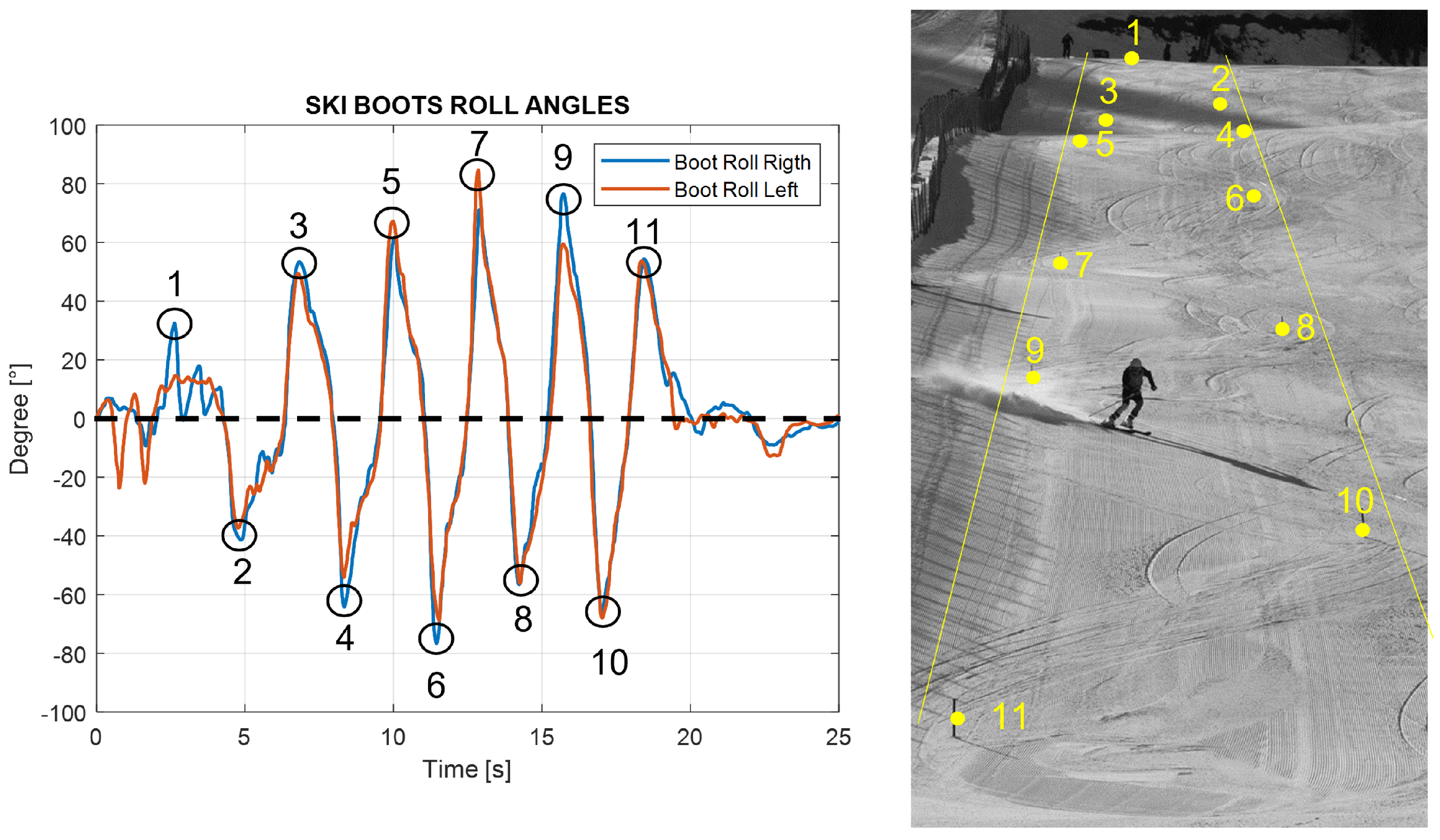
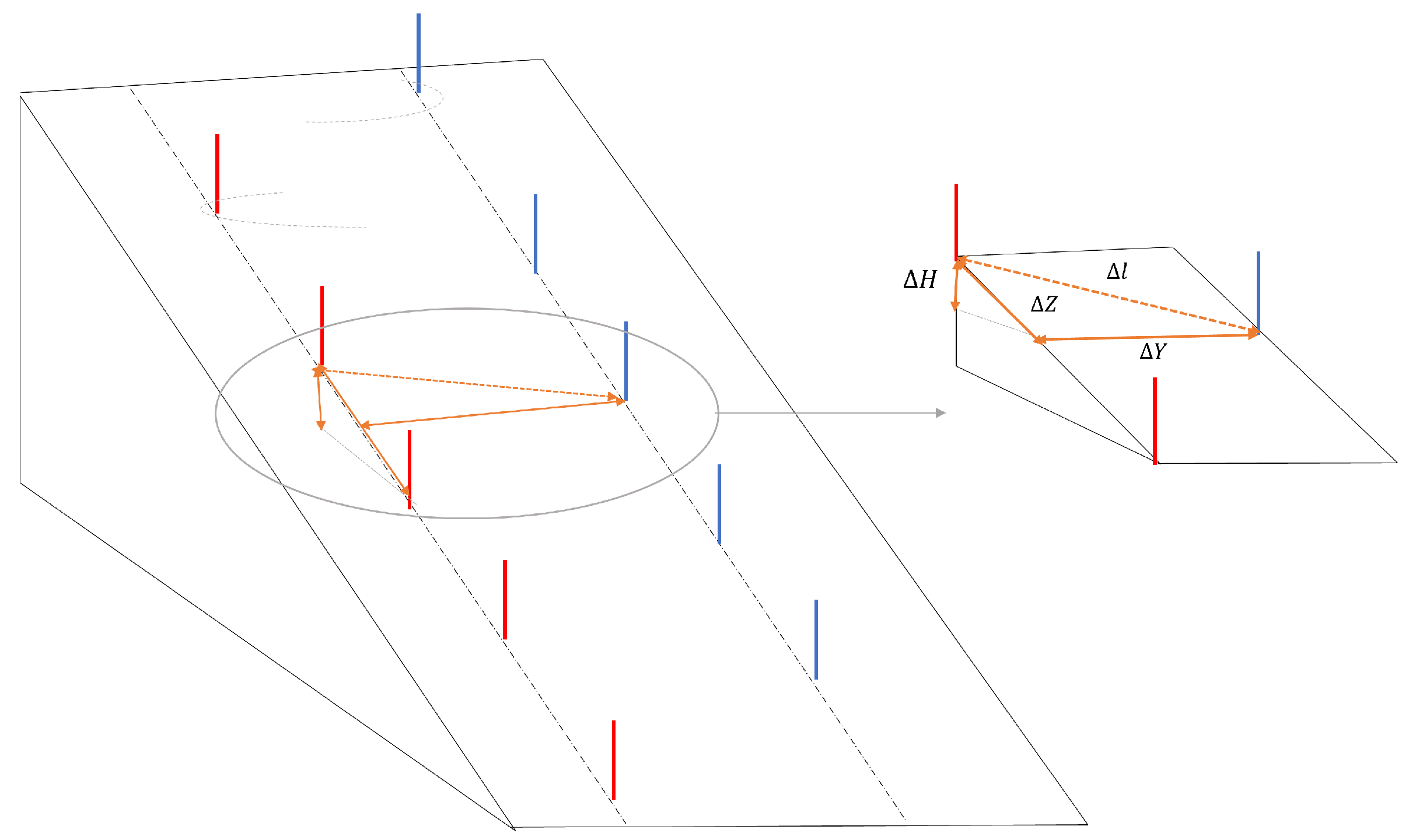
- Number of turns: Counting the peaks from the roll angle graph, the number of turns performed is obtained. The procedure is shown in Figure 8, where on the left the counting peaks and on the right the same turns shown in the ski slope are visible.
- The average roll angle for ski boots and for the back: Computing the maximum inclination of the roll angle values, the average lateral inclinations of the skiers during each turn is obtained.
- The average yaw peak angle for ski boots and for the back: The yaw angle values oscillate around zero. The zero position represents the ski orientation alongside the slope; the maximum inclination represents the ski oriented with this angle with respect to the slope. So, in Figure 10, the peaks represent the end of each turn, and the zeros represent the central phase of the turn. In Table 6, the average values of yaw angles are reported.
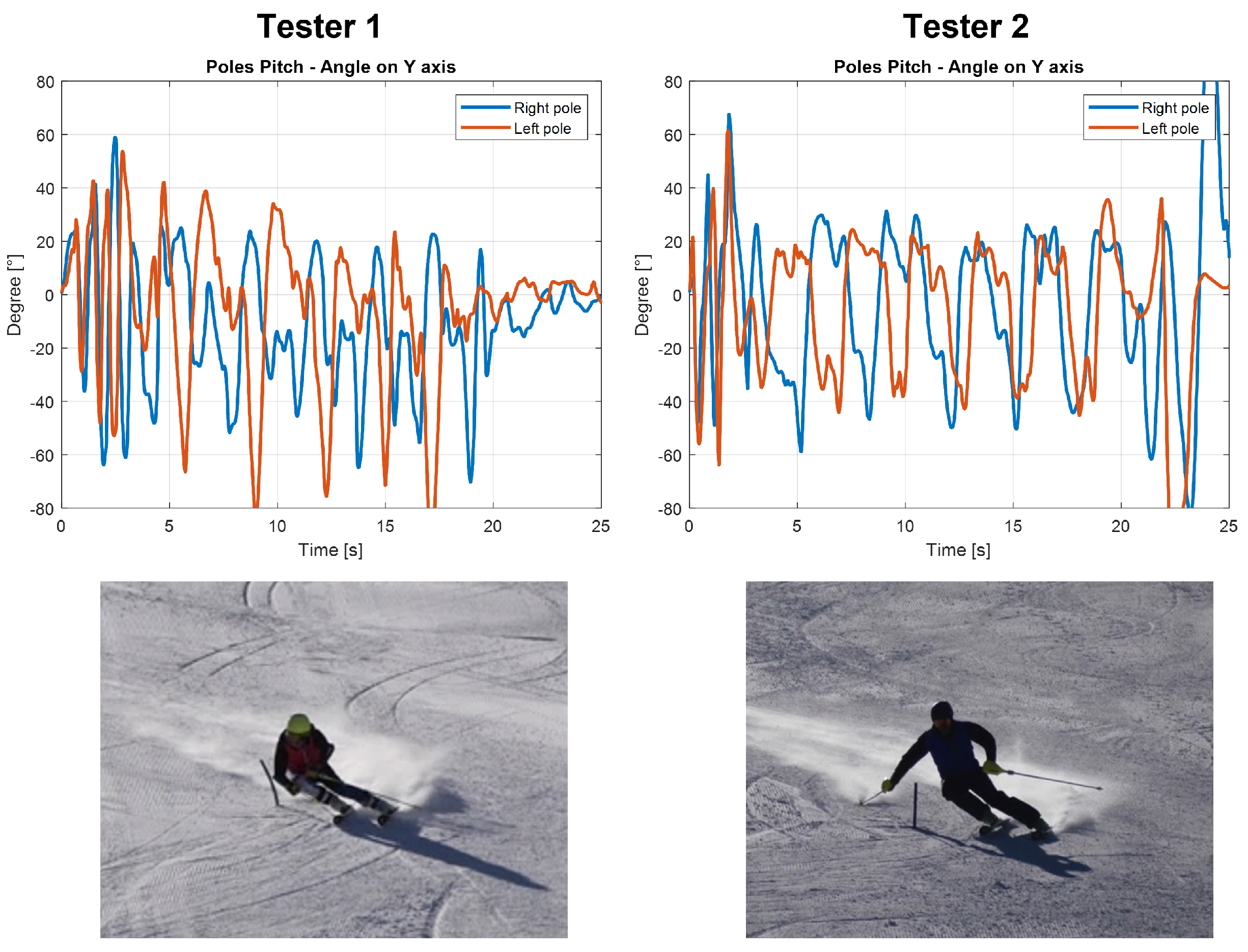
- The average angles for poles: The poles’ orientation became an interesting parameter to understand the correct posture during the ski run. From the angles computed, it is possible to observe the three different movements of the poles. In Figure 11, these movements are shown with the three rotations of the poles. The roll angle of the poles should remain very similar to the lower trunk roll angle because it shows athletes that perform with their arms and poles close to their body, keeping a correct posture. The yaw angle highlights the movement of the poles following the direction of the skies. At the end, the pitch angle emphasizes the understanding of the tendency to approach the gate with arms, which represents imbalanced behavior in the athletes.
3.1. Results Interpretation
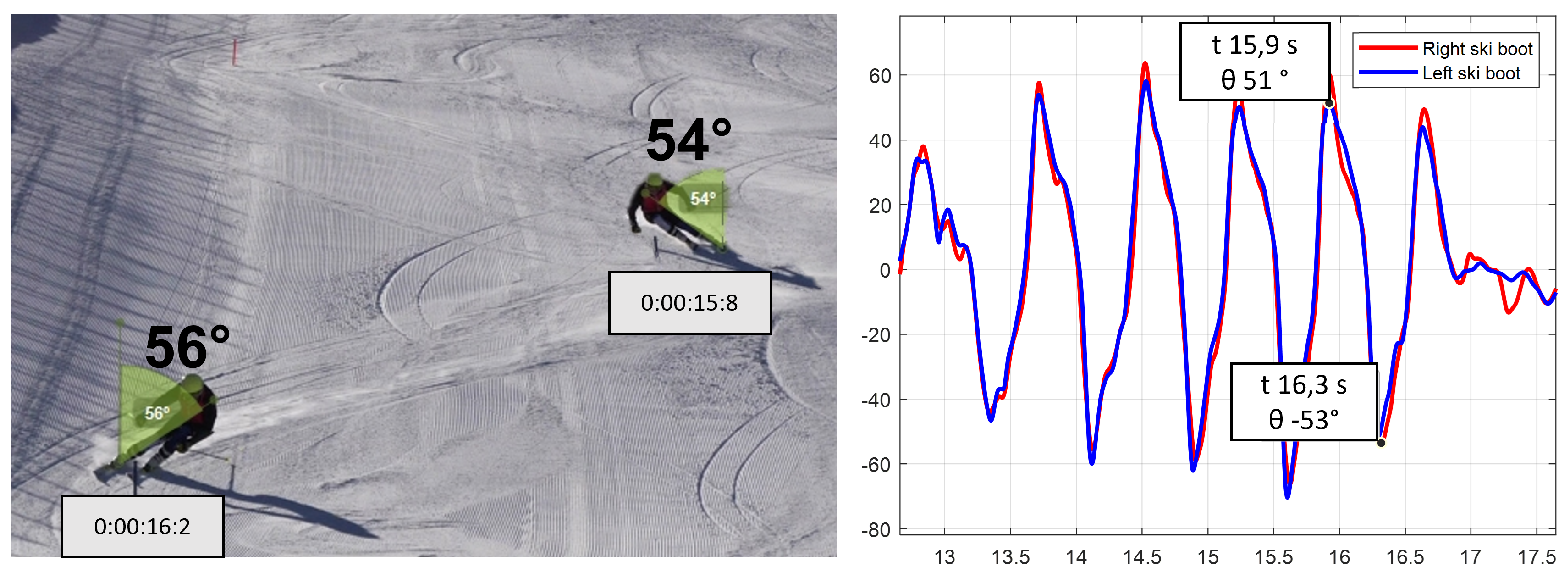
3.2. Comparison of Video and IMU Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aroganam, G.; Manivannan, N.; Harrison, D. Review on Wearable Technology Sensors Used in Consumer Sport Applications. Sensors 2019, 19, 1983. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chardonnens, J.; Favre, J.; Cuendet, F.; Gremion, G.; Aminian, K. A system to measure the kinematics during the entire ski jump sequence using inertial sensors. J. Biomech. 2013, 46, 56–62. [Google Scholar] [CrossRef] [PubMed]
- Balloch, A.S.; Meghji, M.; Newton, R.U.; Hart, N.H.; Weber, J.A.; Ahmad, I.; Habibi, D. Assessment of a Novel Algorithm to Determine Change-of-Direction Angles While Running Using Inertial Sensors. J. Strength Cond. Res. 2020, 34, 134–144. [Google Scholar] [CrossRef] [PubMed]
- Rawashdeh, S.A.; Rafeldt, D.A.; Uhl, T.L. Wearable IMU for Shoulder Injury Prevention in Overhead Sports. Sensors 2016, 16, 1847. [Google Scholar] [CrossRef] [Green Version]
- Arlotti, J.; Carroll, W.; Afifi, Y.; Talegaonkar, P.; Albuquerque, L.; Burch, R.; Ball, J.; Chander, H.; Petway, A. Benefits of IMU-based Wearables in Sports Medicine: Narrative Review. Int. J. Kinesiol. Sports Sci. 2022, 10, 36–43. [Google Scholar] [CrossRef]
- Tedesco, S.; Alfieri, D.; Perez-Valero, E.; Komaris, D.-S.; Jordan, L.; Belcastro, M.; Barton, J.; Hennessy, L.; O’Flynn, B. A Wearable System for the Estimation of Performance-Related Metrics during Running and Jumping Tasks. Appl. Sci. 2021, 11, 5258. [Google Scholar] [CrossRef]
- Komaris, D.S.; Tarfali, G.; O’Flynn, B.; Tedesco, S. Unsupervised IMU-based evaluation of at-home exercise programmes: A feasibility study. BMC Sports Sci. Med. Rehabil. 2022, 14, 28. [Google Scholar] [CrossRef]
- Mocera, F.; Aquilino, G.; Somà, A. Nordic walking performance analysis with an integrated monitoring system. Sensors 2018, 18, 1505. [Google Scholar] [CrossRef] [Green Version]
- Sands, W.A.; Kavanaugh, A.A.; Murray, S.R.; McNeal, J.R.; Jemni, M. Modern Techniques and Technologies Applied to Training and Performance Monitoring. Int. J. Sports Physiol. Perform. 2017, 12, 263–272. [Google Scholar] [CrossRef] [Green Version]
- Thornton, H.; Delaney, J.; Duthie, G.; Dascombe, B. Developing Athlete Monitoring Systems in Team Sports: Data Analysis and Visualization. Int. J. Sports Physiol. Perform. 2019, 14, 698–705. [Google Scholar] [CrossRef]
- Kiernan, D.; Hawkins, D.A.; Manoukian, M.A.C.; McKallip, M.; Oelsner, L.; Caskey, C.F.; Coolbaugh, C.L. Accelerometer-based prediction of running injury in National Collegiate Athletic Association track athletes. J. Biomech. 2018, 17, 201–209. [Google Scholar] [CrossRef] [PubMed]
- Mooney, R.; Corley, G.; Godfrey, A.; Quinlan, L.; OLaighin, G. Inertial Sensor Technology for Elite Swimming Performance Analysis: A Systematic Review. Sensors 2016, 16, 18. [Google Scholar] [CrossRef] [Green Version]
- Hamidi Rad, M.; Gremeaux, V.; Massé, F.; Dadashi, F.; Aminian, K. SmartSwim, a Novel IMU-Based Coaching Assistance. Sensors 2022, 22, 3356. [Google Scholar] [CrossRef] [PubMed]
- Benson, L.C.; Räisänen, A.M.; Clermont, C.A.; Ferber, R. Is This the Real Life, or Is This Just Laboratory? A Scoping Review of IMU-Based Running Gait Analysis. Sensors 2022, 22, 1722. [Google Scholar] [CrossRef]
- Repnik, E.; Puh, U.; Goljar, N.; Munih, M.; Mihelj, M. Using Inertial Measurement Units and Electromyography to Quantify Movement during Action Research Arm Test Execution. Sensors 2018, 18, 2767. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Taborri, J.; Keogh, J.; Kos, A.; Santuz, A.; Umek, A.; Urbanczyk, C.; van der Kruk, E.; Rossi, S. Sport Biomechanics Applications Using Inertial, Force, and EMG Sensors: A Literature Overview. Appl. Bionics Biomech. 2020, 2020, 1176–2322. [Google Scholar] [CrossRef] [PubMed]
- Adesida, Y.; Papi, E.; McGregor, A.H. Exploring the Role of Wearable Technology in Sport Kinematics and Kinetics: A Systematic Review. Sensors 2019, 19, 1597. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Russo, C.; Mocera, F.; Somà, A. MEMS sensors for sport engineer applications. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1038, 012056. [Google Scholar] [CrossRef]
- Bruzzo, J.; Perkins, N.C.; Mikkola, A. Embedded inertial measurement unit reveals pole lean angle for cross-country skiing. Sports Eng. 2020, 23, 6. [Google Scholar] [CrossRef] [Green Version]
- Sulheim, S.; Ekeland, A.; Bahr, R. Self-estimation of ability among skiers and snowboarders in alpine skiing resorts. Knee Surg. Sports Traumatol. Arthrosc. 2007, 15, 665–670. [Google Scholar] [CrossRef] [PubMed]
- Kondo, A.; Doki, H.; Hirose, K. Motion analysis and joint angle measurement of skier gliding on the actual snow field using inertial sensors. Procedia Eng. 2013, 60, 307–312. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Kim, K.; Kim, Y.H. Motion Analysis in Lower Extremity Joints During Ski Carving Turns Using Wearable Inertial Sensors and Plantar Pressure Sensors. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017. [Google Scholar]
- Snyder, C.; Martínez, A.; Jahnel, R.; Roe, J.; Stöggl, T. Connected skiing: Motion quality quantification in alpine skiing. Sensors 2021, 21, 3779. [Google Scholar] [CrossRef] [PubMed]
- Martínez, A.; Brunauer, R.; Venek, V.; Snyder, C.; Jahnel, R.; Buchecker, M.; Thorwartl, C.; Stöggl, T. Development and Validation of a Gyroscope-Based Turn Detection Algorithm for Alpine Skiing in the Field. Front. Sports Act. Living 2019, 1, 18. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Matsumura, S.; Ohta, K.; Yamamoto, S.I.; Koike, Y.; Kimura, T. Comfortable and convenient turning skill assessment for alpine skiers using imu and plantar pressure distribution sensors. Sensors 2021, 21, 834. [Google Scholar] [CrossRef] [PubMed]
- Bon, I.; Očić, M.; Cigrovski, V.; Rupčić, T.; Knjaz, D. What Are Kinematic and Kinetic Differences between Short and Parallel Turn in Alpine Skiing? Int. J. Environ. Res. Public Health 2021, 18, 3029. [Google Scholar] [CrossRef]
- Martínez, A.; Jahnel, R.; Buchecker, M.; Snyder, J.; Brunauer, R.; Stöggl, T. Development of an automatic alpine skiing turn detection algorithm based on a simple sensor setup. Sensors 2021, 19, 902. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martínez, A.; Snyder, C.; Moore, S.R.; Stöggl, T. A Comprehensive Comparison and Validation of Published Methods to Detect Turn Switch during Alpine Skiing. Sensors 2022, 21, 2573. [Google Scholar] [CrossRef] [PubMed]
- Jølstad, P.A.; Reid, R.C.; Gjevestad, J.G.; Gilgien, M. Validity of the AdMos, Advanced Sport Instruments, GNSS Sensor for Use in Alpine Skiing. Remote Sens. 2022, 14, 22. [Google Scholar] [CrossRef]
- Fasel, B.; Gilgien, M.; Sporri, J.; Aminian, K. A New Training Assessment Method for Alpine Ski Racing: Estimating Center of Mass Trajectory by Fusing Inertial Sensors with Periodically Available Position Anchor Points. Front. Physiol. 2018, 9, 1203. [Google Scholar] [CrossRef]
- Qi, J.; Li, D.; Zhang, C.; Wang, Y. Alpine Skiing Tracking Method Based on Deep Learning and Correlation Filter. IEEE Access 2022, 10, 39248–39260. [Google Scholar] [CrossRef]
- Ruiz-García, I.; Navarro-Marchal, I.; Ocaña-Wilhelmi, J.; Palma, A.J.; Gómez-López, P.J.; Buchecker, M.; Carvajal, M.A. Development and evaluation of a low-drift inertial sensor-based system for analysis of alpine skiing performance. Sensors 2021, 21, 2480. [Google Scholar] [CrossRef] [PubMed]
- Available online: https://mbientlab.com (accessed on 25 April 2022).
- Yu, G.; Jang, Y.J.; Kim, J.; Kim, J.H.; Kim, H.Y.; Kim, K.; Panday, S. Potential of IMU Sensors in Performance Analysis of Professional Alpine Skiers. Sensors 2016, 16, 463. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Petrone, N.; Marcolin, G.; Panizzolo, F.A. The effect of boot stiffness on field and laboratory flexural behavior of alpine ski boots. Sports Eng. 2013, 16, 265–280. [Google Scholar] [CrossRef]
- Gui, P.; Tang, L.; Mukhopadhyay, S. MEMS based IMU for tilting measurement: Comparison of complementary and kalman filter based data fusion. In Proceedings of the IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 2004–2009. [Google Scholar]
- Ariffin, N.H.; Arsad, N.; Bais, B. Low cost MEMS gyroscope and accelerometer implementation without Kalman Filter for angle estimation. In Proceedings of the International Conference on Advances in Electrical, Electronic and Systems Engineering (ICAEES), Putrajaya, Malaysia, 14–16 November 2016; pp. 77–82. [Google Scholar]
- Panizzolo, F.A.; Marcolin, G.; Petrone, N. Comparative evaluation of two skiing simulators as functional training devices for recreational skiers. J. Sports Sci. Med. 2013, 12, 151–158. [Google Scholar] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
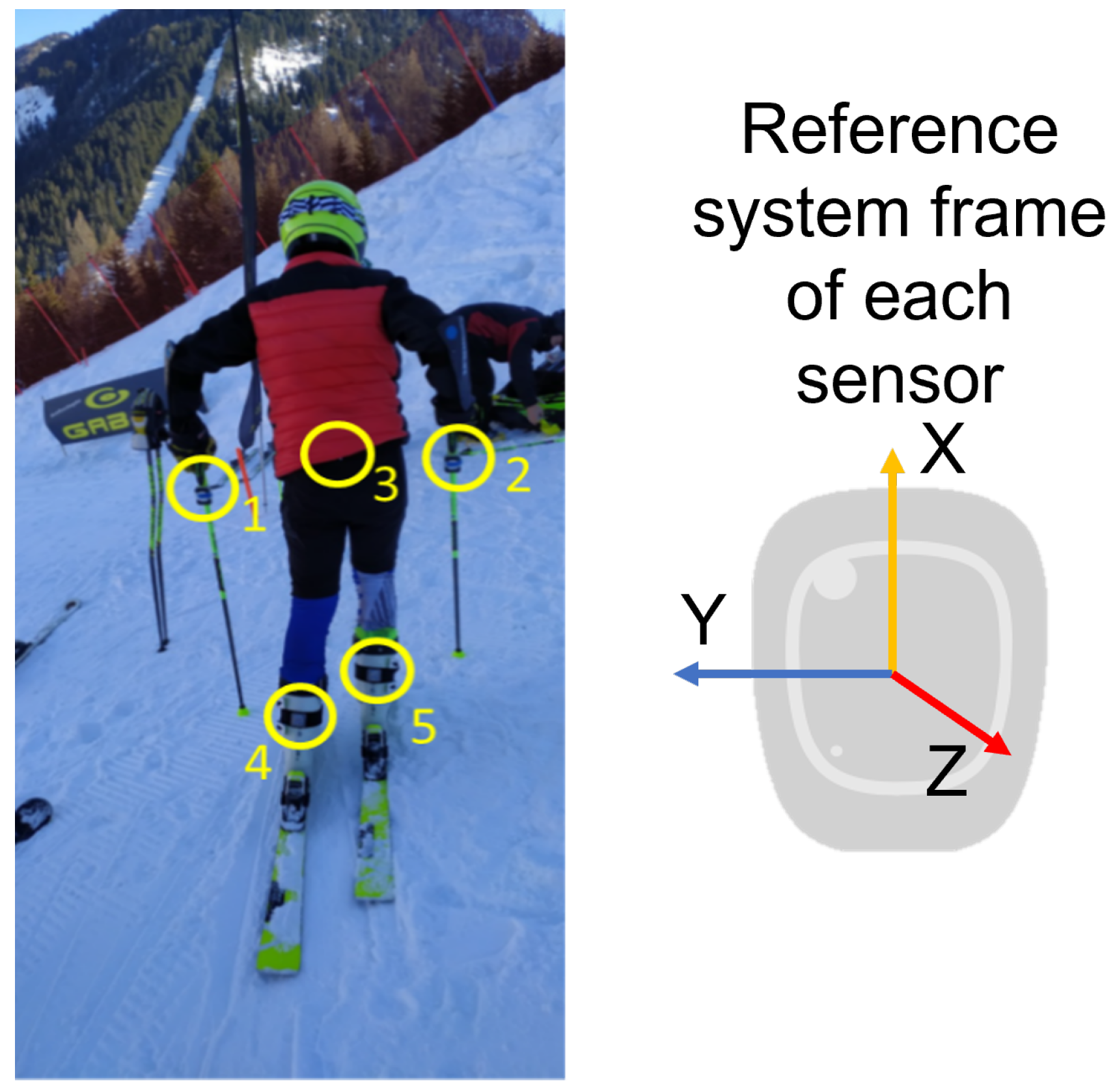
| Number | Name |
|---|---|
| 1 | Left pole |
| 2 | Right pole |
| 3 | Lower trunk |
| 4 | Left boot cuff |
| 5 | Right boot cuff |
| Description | Min | Max | Units |
|---|---|---|---|
| Measurement range | ±2 | ±16 | g |
| Resolution | 2048 | 16,384 | counts/g |
| Description | Min | Max | Units |
|---|---|---|---|
| Measurement range | ±125 | ±2000 | °/s |
| Resolution | 16 | 262 | counts/° |
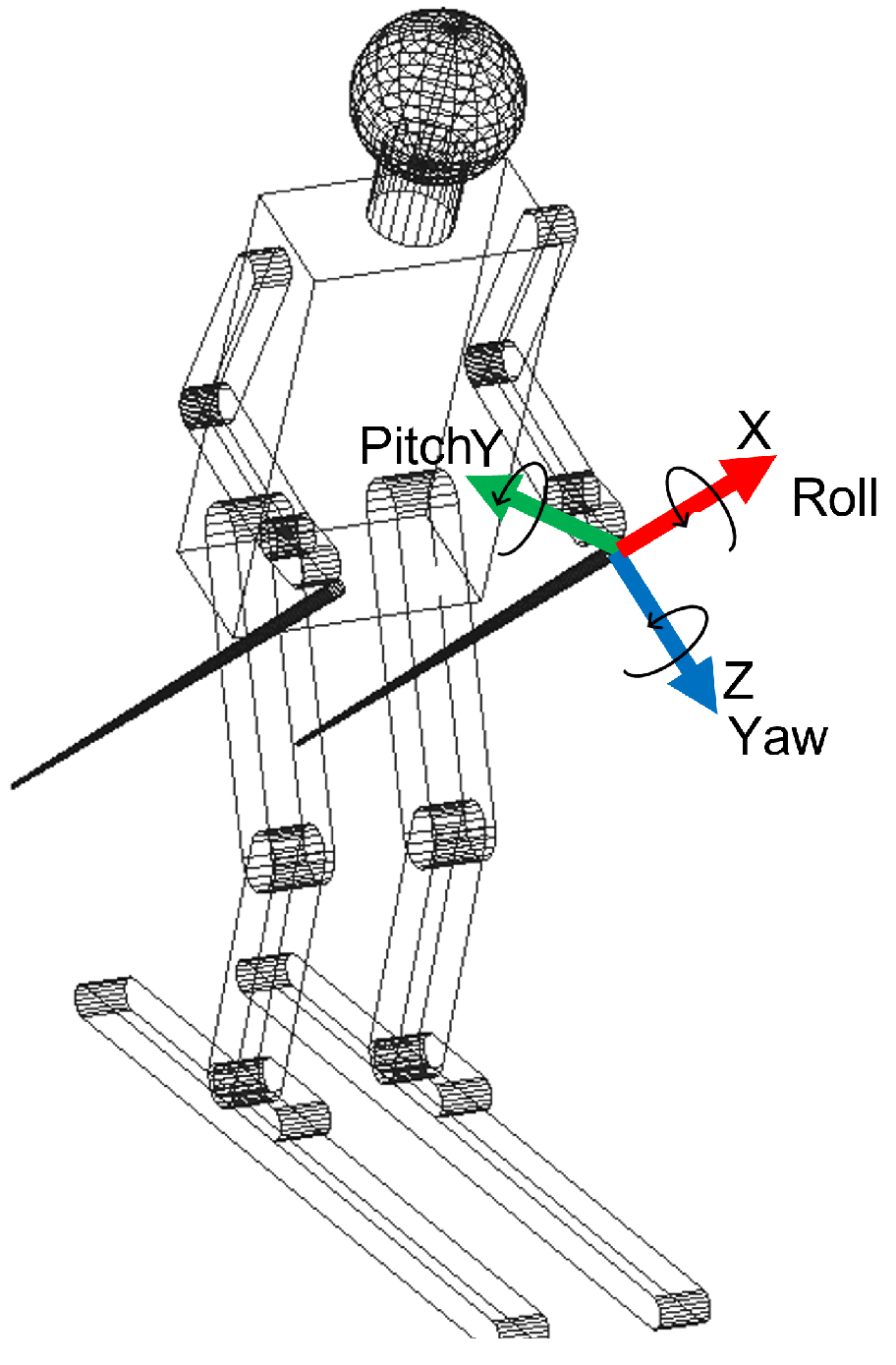
| Angles | Description |
|---|---|
| Roll or Lateral Inclination | Rotation around the z axis |
| Yaw or turn | Around the x axis |
| Pitch or flex | Rotation around the y axis |
| Tester | Av. Ski Boot Roll Peak Angles | Av. Back Roll Peak Angles |
|---|---|---|
| 1 | 62° | 23° |
| 2 | 63° | 21° |
| Tester | Av. Ski Boot Yaw Angles | Av. Back Yaw Angles |
|---|---|---|
| 1 | 22° | 29° |
| 2 | 21° | 29° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Russo, C.; Puppo, E.; Roati, S.; Somà, A. Proposal of an Alpine Skiing Kinematic Analysis with the Aid of Miniaturized Monitoring Sensors, a Pilot Study. Sensors 2022, 22, 4286. https://doi.org/10.3390/s22114286
Russo C, Puppo E, Roati S, Somà A. Proposal of an Alpine Skiing Kinematic Analysis with the Aid of Miniaturized Monitoring Sensors, a Pilot Study. Sensors. 2022; 22(11):4286. https://doi.org/10.3390/s22114286
Chicago/Turabian StyleRusso, Caterina, Elena Puppo, Stefania Roati, and Aurelio Somà. 2022. "Proposal of an Alpine Skiing Kinematic Analysis with the Aid of Miniaturized Monitoring Sensors, a Pilot Study" Sensors 22, no. 11: 4286. https://doi.org/10.3390/s22114286
APA StyleRusso, C., Puppo, E., Roati, S., & Somà, A. (2022). Proposal of an Alpine Skiing Kinematic Analysis with the Aid of Miniaturized Monitoring Sensors, a Pilot Study. Sensors, 22(11), 4286. https://doi.org/10.3390/s22114286