
Force and Torque Characterization in the Actuation of a Walking-Assistance, Cable-Driven Exosuit

 , , , and
, , , and 
Abstract
:1. Introduction
2. Materials and Methods
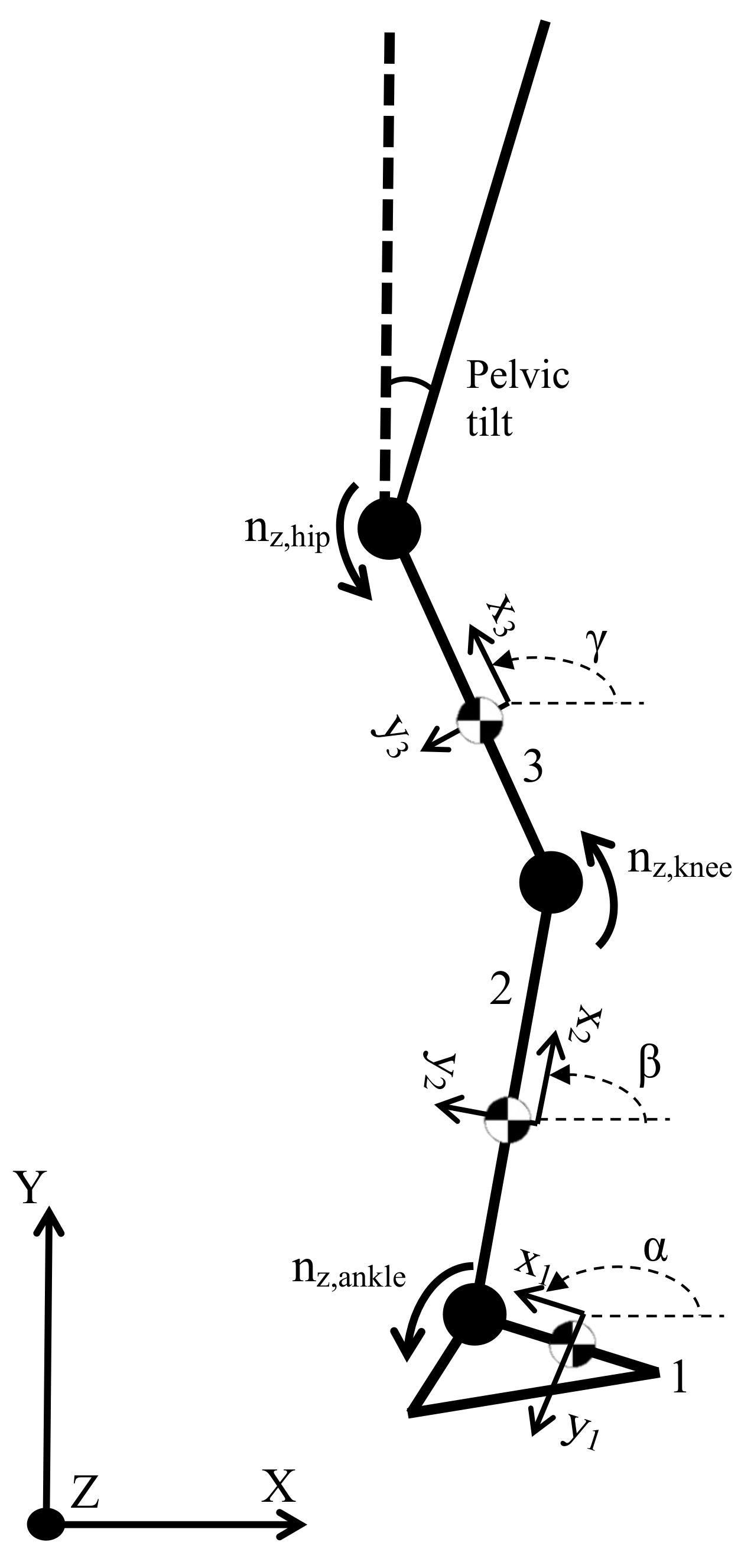
2.1. An Inverse Dynamics Model for Human Gait
- Segment 1, foot:In (4), represents the angular acceleration of the foot segment around its center of gravity with respect to the fixed i axis of the global reference frame, while is the Euler angle i of segment j. The ground contact force is referred to as and the force and torque at joint j (a for ankle, k for knee, and h for hip) are and , respectively. COM stands for the center of mass and vectors are described such that their subindex is their origin; , for instance, is a vector from the foot’s COM to the application point of the ground contact force.
- Segment 2, shank or leg lower segment:
- Segment 3, thigh or leg upper segment:
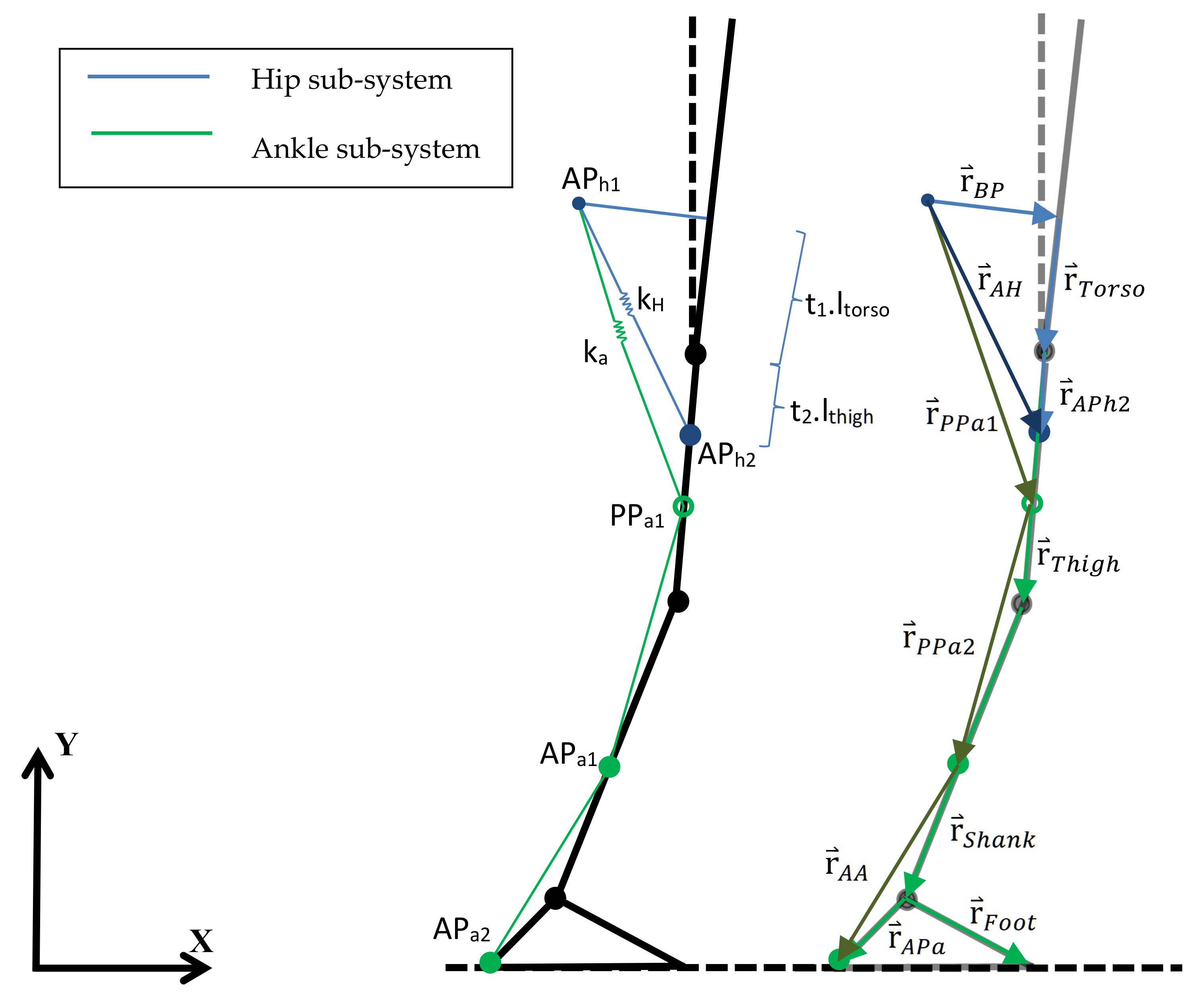
2.2. Approach to the Design of a Lower-Limb Assistance Exosuit
3. Results and Discussion
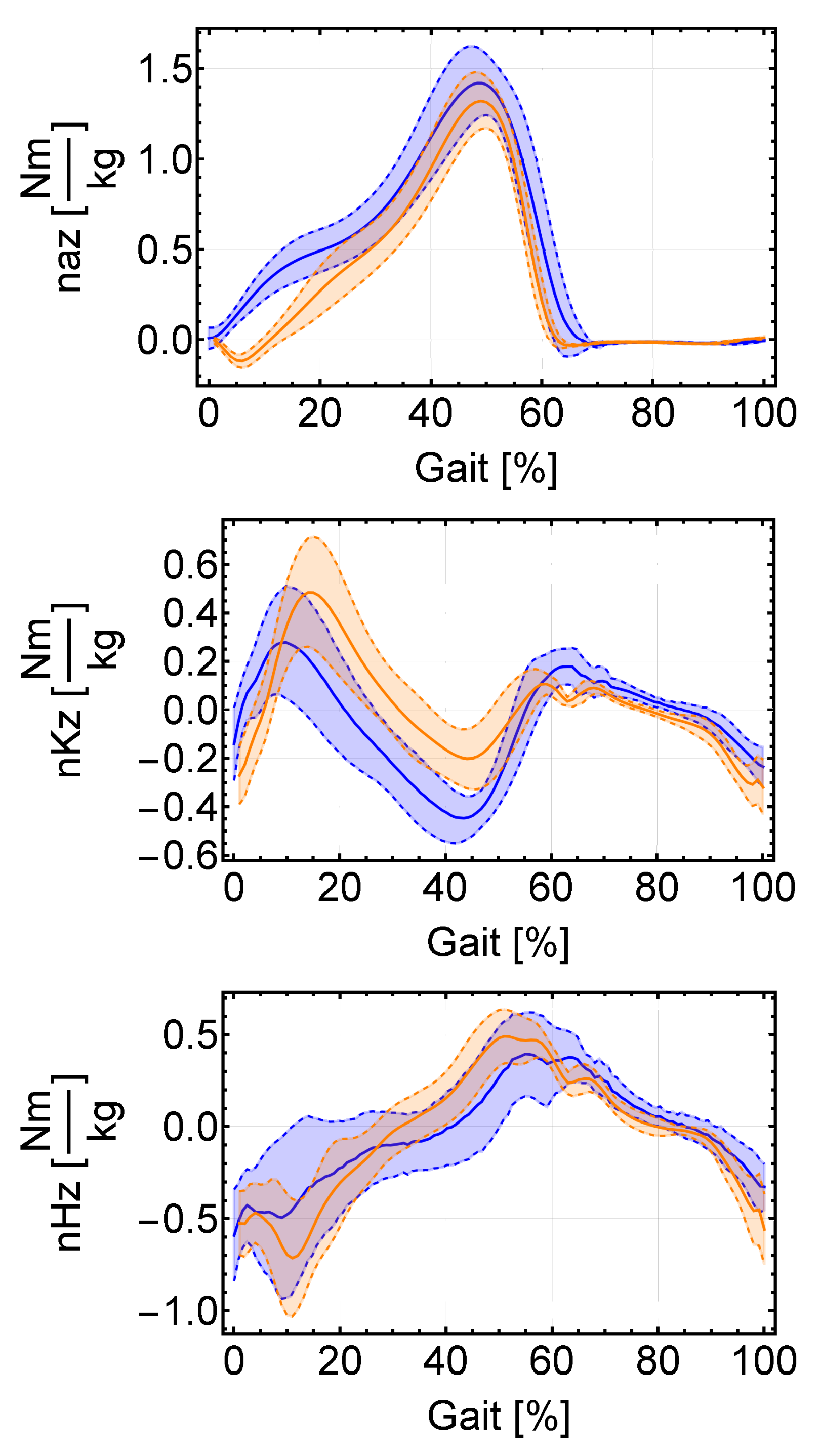
3.1. Inverse Dynamics Results
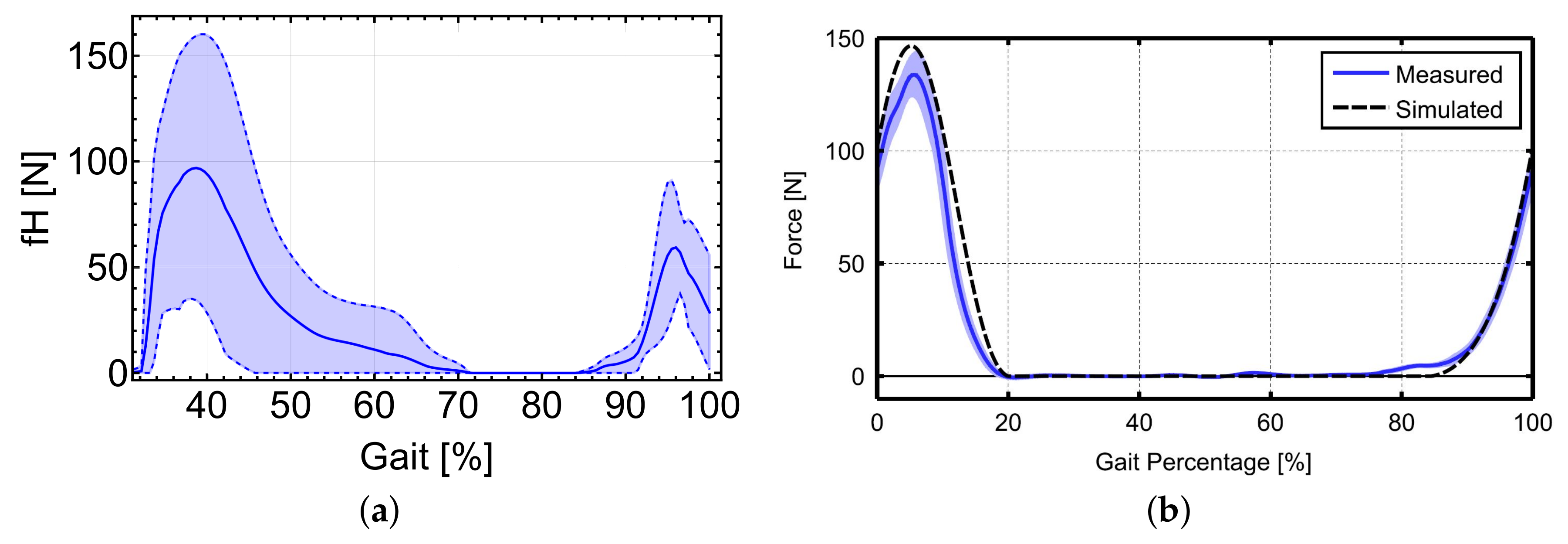
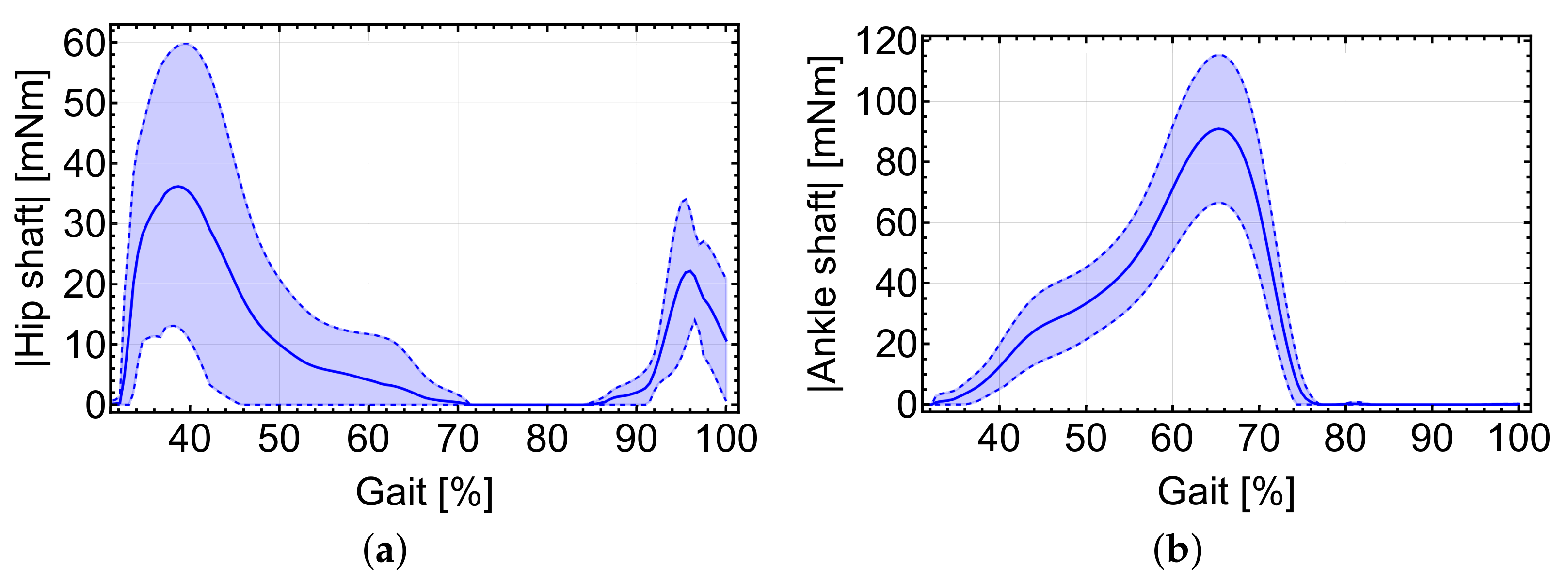
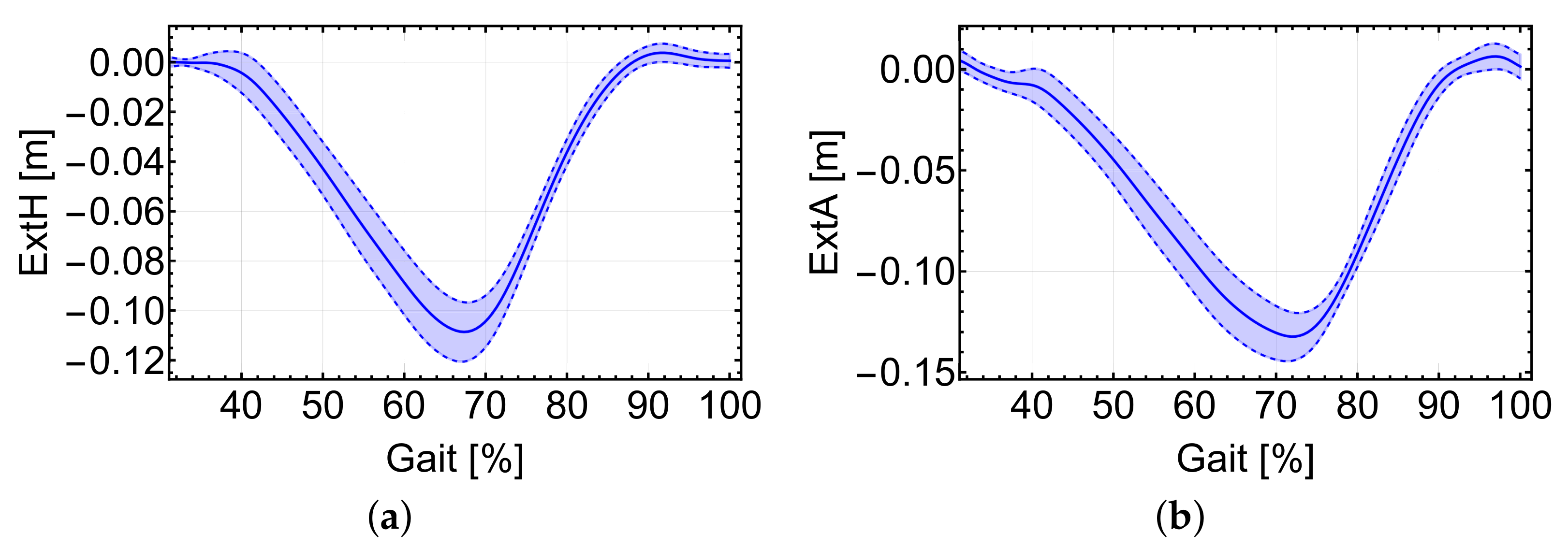
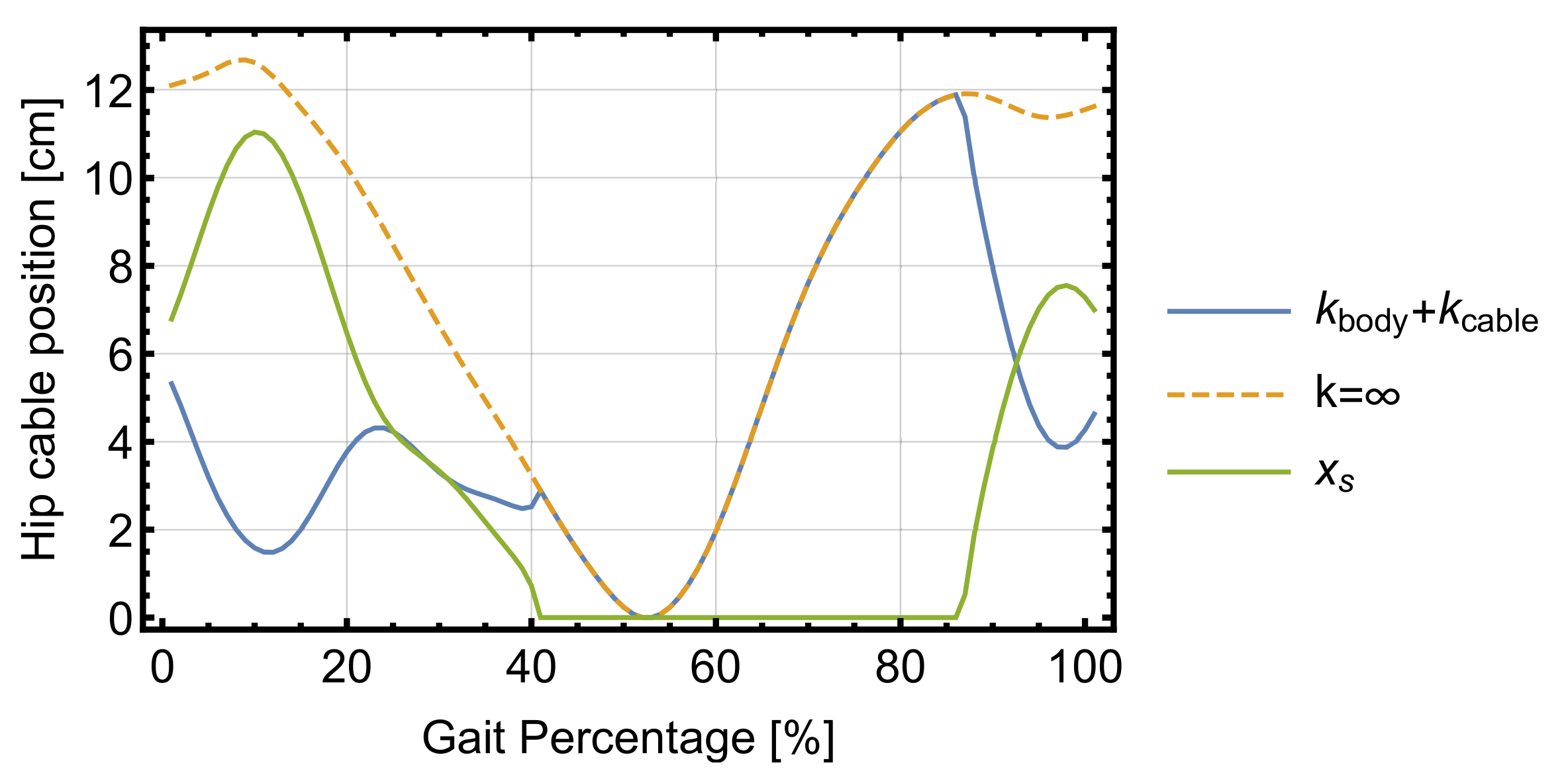
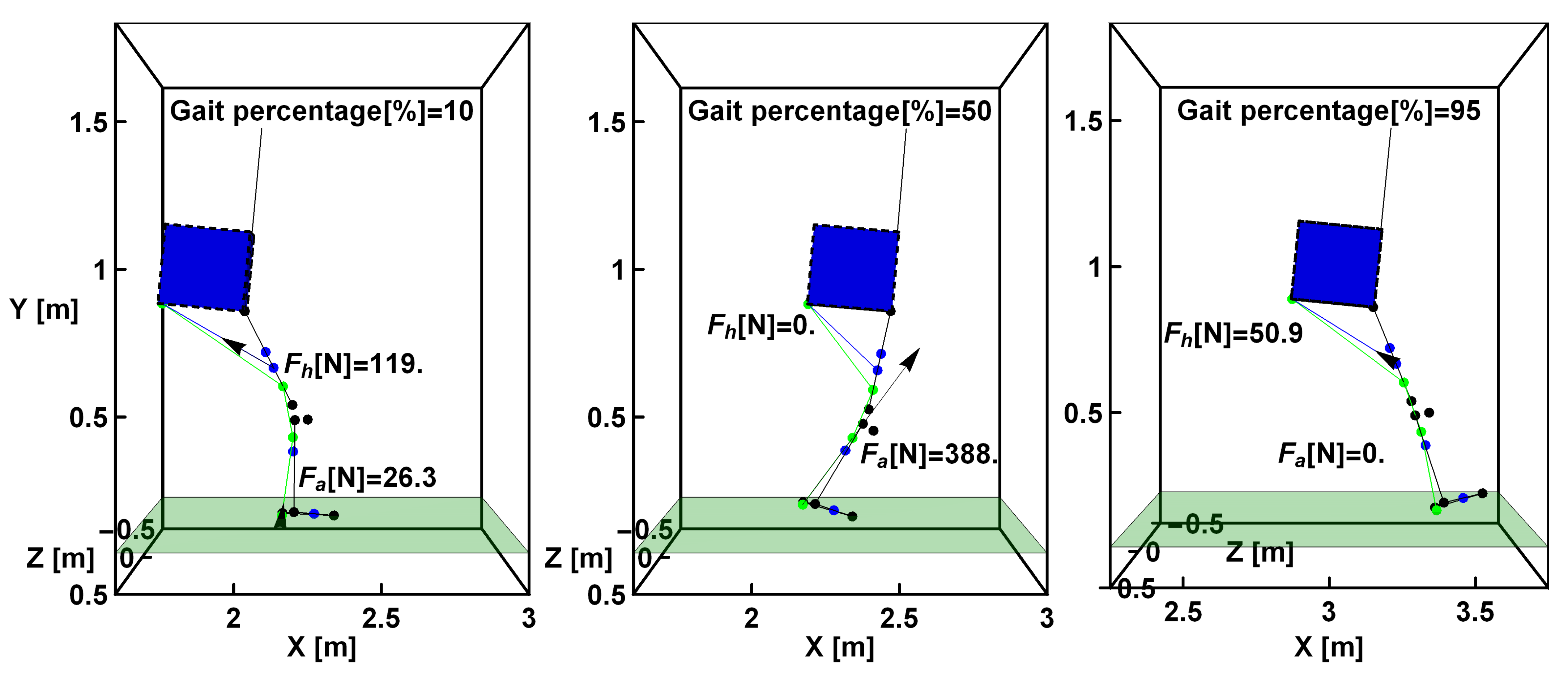
3.2. Motor Torque in a Wearable Exosuit
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Quinlivan, B.; Asbeck, A.; Wagner, D.; Ranzani, T.; Russo, S.; Walsh, C. Force Transfer Characterization of a Soft Exosuit for Gait Assistance. In Proceedings of the 39th Mechanisms and Robotics Conference. American Society of Mechanical Engineers, Boston, MA, USA, 2–5 August 2015; Volume 5A. [Google Scholar] [CrossRef] [Green Version]
- Natali, C.; Poliero, T.; Sposito, M.; Graf, E.; Bauer, C.; Pauli, C.; Bottenberg, E.; Eyto, A.; O’Sullivan, L.; Hidalgo, A.; et al. Design and Evaluation of a Soft Assistive Lower Limb Exoskeleton. Robotica 2019, 37, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Wei, W.; Qu, Z.; Wang, W.; Zhang, P.; Hao, F. Design on the bowden cable-driven upper limb soft exoskeleton. Appl. Bionics Biomech. 2018, 1925694. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Asbeck, A.T.; Schmidt, K.; Galiana, I.; Wagner, D.; Walsh, C.J. Multi-joint soft exosuit for gait assistance. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Schmidt, K.; Walsh, C.J. Soft exosuit for hip assistance. Robot. Auton. Syst. 2015, 73, 102–110. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Cappello, L.; Khanh, D.B.; Yen, S.C.; Masia, L. Modelling and design of a synergy-based actuator for a tendon-driven soft robotic glove. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 1213–1219. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Cappello, L.; Binh, K.D.; Antuvan, C.W.; Masia, L. Preliminary design and control of a soft exosuit for assisting elbow movements and hand grasping in activities of daily living. J. Rehabil. Assist. Technol. Eng. 2017, 4, 2055668316680315. [Google Scholar] [CrossRef] [PubMed]
- In, H.; Lee, H.; Jeong, U.; Kang, B.B.; Cho, K.J. Feasibility study of a slack enabling actuator for actuating tendon-driven soft wearable robot without pretension. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 25–30 June 2015; pp. 1229–1234. [Google Scholar] [CrossRef]
- Bae, J.; Kong, K.; Tomizuka, M. Real-time estimation of lower extremity joint torques in normal gait. IFAC Proc. Vol. 2009, 42, 443–448. [Google Scholar] [CrossRef]
- Ren, L.; Jones, K.J.; Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J. Biomech. 2008, 41, 2750–2759. [Google Scholar] [CrossRef] [PubMed]
- Blajer, W.; Dziewiecki, K.; Mazur, Z. Multibody modelling of human body for the inverse dynamics analysis of sagittal plane movements. Multibody Syst. Dyn. 2007, 18, 217–232. [Google Scholar] [CrossRef]
- McGrath, M.; Howard, D.; Baker, R. A Lagrange-based generalised formulation for the equations of motion of simple walking models. J. Biomech. 2017, 55, 139–143. [Google Scholar] [CrossRef] [PubMed]
- Mann, P. Lagrangian and Hamiltonian Dynamics; Press, Oxford University: Oxford, UK, 2018. [Google Scholar] [CrossRef]
- Moreira, P.; Lugrís, U.; Cuadrado, J.; Flores, P. Biomechanical models for human gait analyses using inverse dynamics formulation. In Proceedings of the 5º Congreso Nacional de Biomecánica, Espinho, Portugal, 6–9 February 2013. [Google Scholar]
- Kong, K.; Tomizuka, M. A gait monitoring system based on air pressure sensors embedded in a shoe. IEEE/ASME Trans. Mechatronics 2009, 14, 358–370. [Google Scholar] [CrossRef]
- Lee, Y.; Kim, Y.; Lee, J.; Lee, M.; Choi, B.; Kim, J.; Park, Y.J.; Choi, J. Biomechanical Design of a Novel Flexible Exoskeleton for Lower Extremities. IEEE/ASME Trans. Mechatronics 2017, 22, 2058–2069. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Rossi, S.M.M.D.; Holt, K.G.; Walsh, C.J. A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Cappello, L.; Binh, D.K.; Yen, S.C.; Masia, L. Design and preliminary characterization of a soft wearable exoskeleton for upper limb. In Proceedings of the 6th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Annese, E.; Canesi, M.; Kodiyan, A.; Bicchi, A.; Micera, S.; Ajoudani, A.; Masia, L. Design and Validation of a Modular One-To-Many Actuator for a Soft Wearable Exosuit. Front. Neurorobot. 2019, 13, 39. [Google Scholar] [CrossRef]
- Fang, Q.; Li, G.; Xu, T.; Zhao, J.; Cai, H.; Zhu, Y. A Simplified Inverse Dynamics Modelling Method for a Novel Rehabilitation Exoskeleton with Parallel Joints and Its Application to Trajectory Tracking. Math. Probl. Eng. 2019, 2019, 1–10. [Google Scholar] [CrossRef]
- Perry, J.; Burnfield, J. Gait Analysis: Normal and Pathological Function; Slack Incorporated: West Deptford, NJ, USA, 2010. [Google Scholar]
- Borowski, A.; Metz, A.; Sergi, F. Dynamic model of a cable-conduit actuation for interaction with non-passive environments. In Proceedings of the 2018 IEEE Haptics Symposium (HAPTICS), San Francisco, CA, USA, 25–28 March 2018. [CrossRef]
- Letier, P.; Schiele, A.; Avraam, M.; Horodinca, M.; Preumont, A. Bowden cable actuator for torque-feedback in haptic applications. In Proceedings of the IEEE International Workshop on Intelligent Robots and Systems (IROS), Beijing, China, 10–13 October 2006. [Google Scholar] [CrossRef]
- Fukuchi, C.A.; Fukuchi, R.K.; Duarte, M. A public dataset of overground and treadmill walking kinematics and kinetics in healthy individuals. PeerJ 2018, 6, e4640. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Winter, D.A. Biomechanics and Motor Control of Human Movement; John Wiley and Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Delp, S.L.; Loan, J.P.; Hoy, M.G.; Zajac, F.E.; Topp, E.L.; Rosen, J.M. An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures. IEEE Trans. Biomed. Eng. 1990, 37, 757–767. [Google Scholar] [CrossRef] [PubMed]
- Fukuchi, R.K.; Fukuchi, C.A.; Duarte, M. A public dataset of running biomechanics and the effects of running speed on lower extremity kinematics and kinetics. PeerJ 2017, 5, e3298. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kristianslund, E.; Krosshaug, T.; van der Bogert, A.J. Effect of low pass filtering on joint moments from inverse dynamics: Implications for injury prevention. J. Biomech. 2012, 45, 666–671. [Google Scholar] [CrossRef] [PubMed] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hip Sub-System | Ankle Sub-System | |
|---|---|---|
| Max. continuous torque [Nm] | 4 | 4 |
| Max. continuous torque at the motor shaft [mNm] | 95.6 | 95.6 |
| Transmission ratio [-] | 1:33 | 1:79 |
| Pulley radius [m] | 0.0126 | 0.019 |
| t1 [-] | 0 | 0 |
| t2 [-] | 0.6 | 0.8 |
| t3 [-] | - | 0.3 |
| Backpack length [m] | 0.32 | 0.32 |
| Trajectory points | 0 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez Jorge, D.; Bermejo García, J.; Jayakumar, A.; Lorente Moreno, R.; Agujetas Ortiz, R.; Romero Sánchez, F. Force and Torque Characterization in the Actuation of a Walking-Assistance, Cable-Driven Exosuit. Sensors 2022, 22, 4309. https://doi.org/10.3390/s22114309
Rodríguez Jorge D, Bermejo García J, Jayakumar A, Lorente Moreno R, Agujetas Ortiz R, Romero Sánchez F. Force and Torque Characterization in the Actuation of a Walking-Assistance, Cable-Driven Exosuit. Sensors. 2022; 22(11):4309. https://doi.org/10.3390/s22114309
Chicago/Turabian StyleRodríguez Jorge, Daniel, Javier Bermejo García, Ashwin Jayakumar, Rafael Lorente Moreno, Rafael Agujetas Ortiz, and Francisco Romero Sánchez. 2022. "Force and Torque Characterization in the Actuation of a Walking-Assistance, Cable-Driven Exosuit" Sensors 22, no. 11: 4309. https://doi.org/10.3390/s22114309
APA StyleRodríguez Jorge, D., Bermejo García, J., Jayakumar, A., Lorente Moreno, R., Agujetas Ortiz, R., & Romero Sánchez, F. (2022). Force and Torque Characterization in the Actuation of a Walking-Assistance, Cable-Driven Exosuit. Sensors, 22(11), 4309. https://doi.org/10.3390/s22114309