
Estimation of Knee Extension Force Using Mechanomyography Signals Based on GRA and ICS-SVR



Abstract
:1. Introduction
- (1)
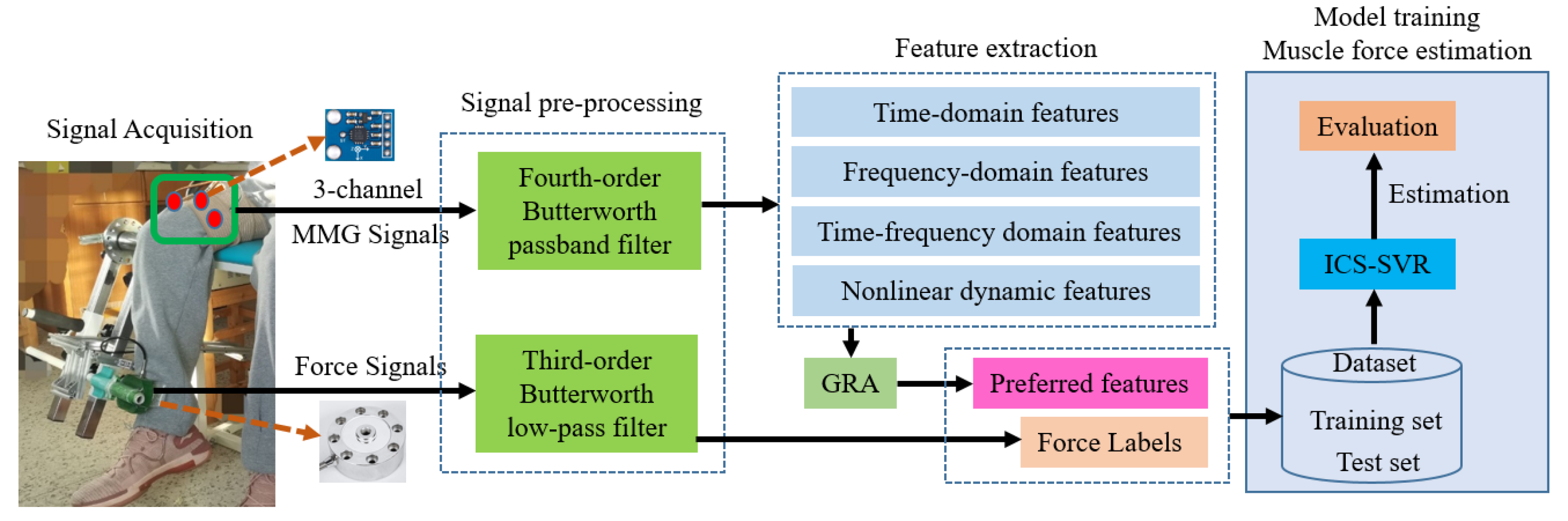
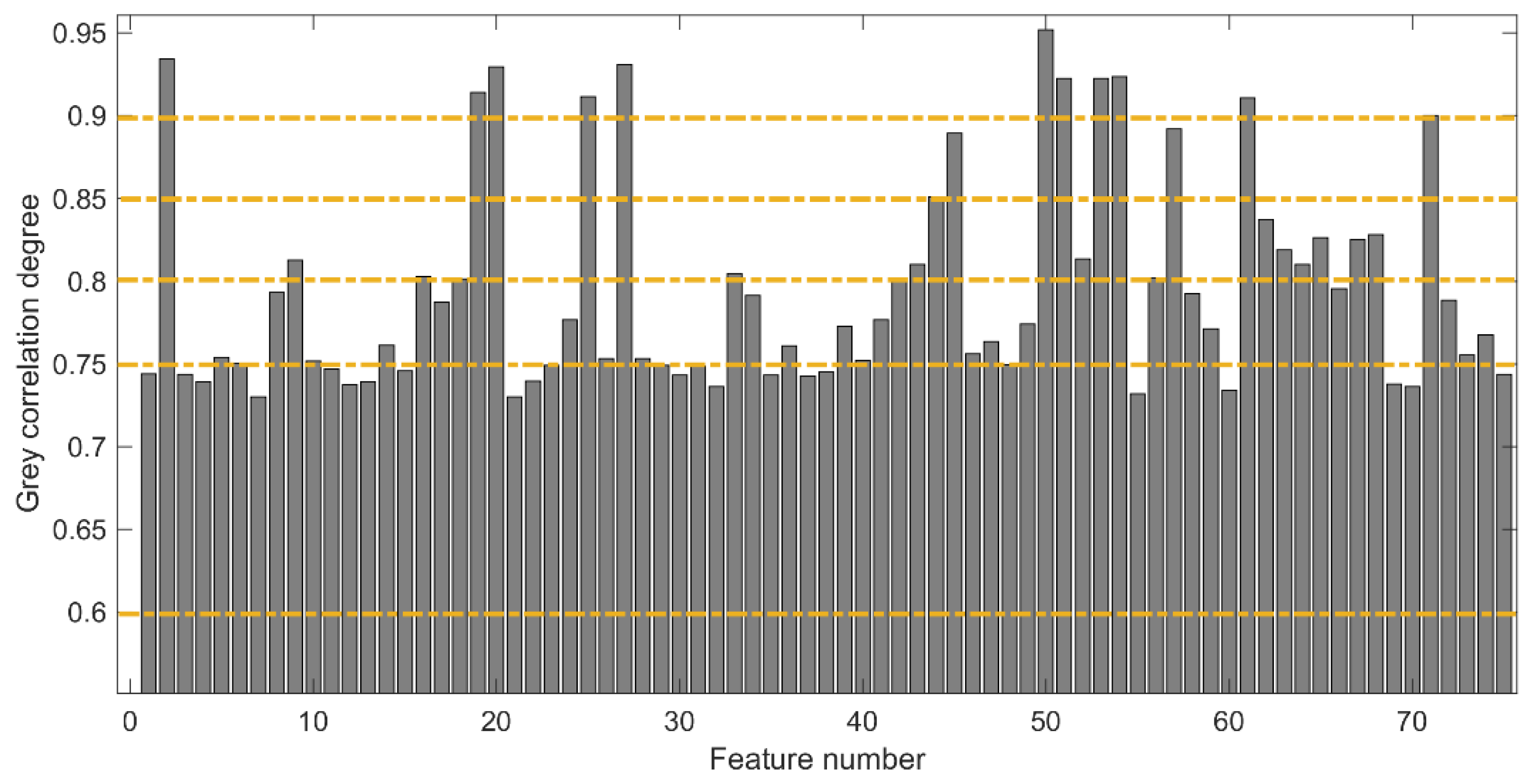
- In this paper, the features reflecting muscle activity were fully considered to avoid the limitations of a single category of features and conventional features. We extracted time-domain features, frequency-domain features, and time–frequency-domain features from MMG signals, as well as nonlinear dynamics features. In order to obtain effective features that are highly correlated with muscle force, GRA was employed for effective feature selection, aiming to achieve high accuracy muscle force estimation using these effective features reflecting muscle activity.
- (2)
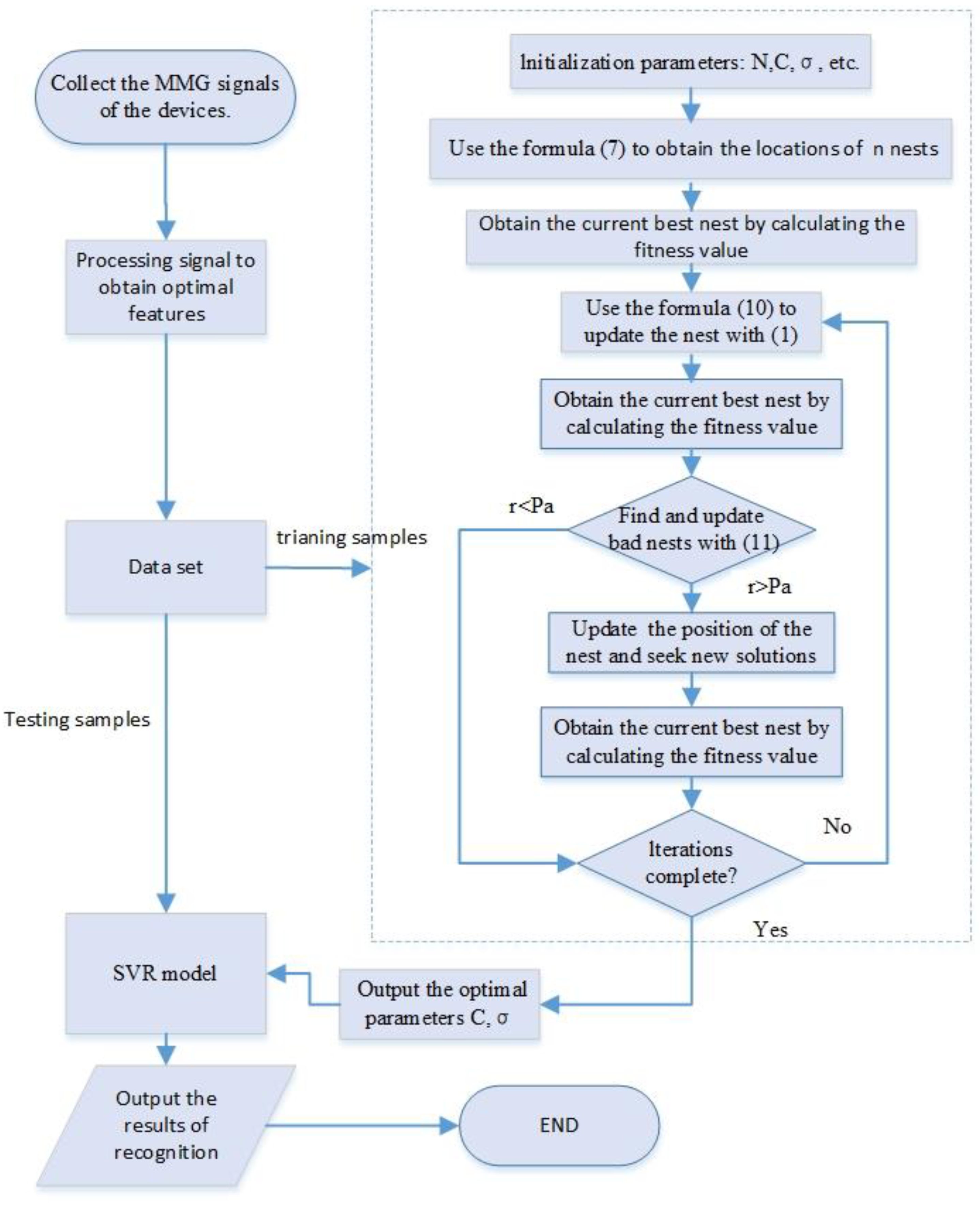
- In this paper, muscle force estimation was based on the SVR model, whose performance depends entirely on critical parameters (C, σ). The cuckoo search (CS) algorithm can optimize the SVR parameters due to the advantages of fast convergence, few parameters, and easy implementation. To obtain better optimization performance, we improved the CS algorithm using a chaotic Tent initialization population and adaptive control parameters. Compared with other optimization algorithms, the optimal global minimum and optimal convergence performance of ICS were obtained in test benchmark functions.
- (3)
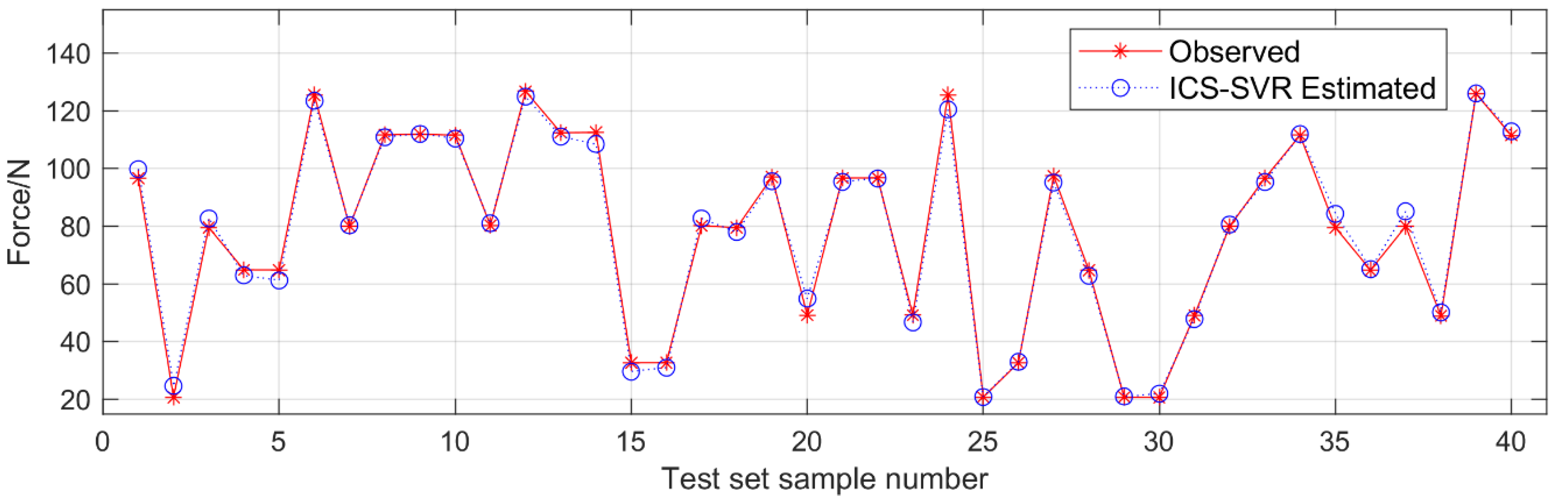
- In this paper, combining the advantages of GRA and ICS-SVR, we designed an MMG–force scheme to effectively obtain muscle activity features and accurately perform muscle force estimation.
2. ICS-SVR
2.1. SVR
2.2. Cuckoo Search Algorithm
- (1)
- Each cuckoo lays one egg in a randomly selected host nest at a time.
- (2)
- Following the survival of the fittest principle, a strong surviving egg among all the host nests is inherited by the next generation.
- (3)
- For a fixed number of host nests, the probability of the intruder egg being found by the host bird is Pa ∈ [0, 1].
2.3. Improved Cuckoo Search Algorithm
2.3.1. Initial Population Chaoticization
2.3.2. Adaptive Control Parameters
2.4. Architecture of the ICS-SVR Model
2.5. Gray Correlation Analysis
2.6. Performance of the Models
3. Signal Acquisition and Preprocessing
3.1. Experimental Procedure and Signal Processing
3.2. Feature Extraction
3.3. Data Normalization
4. Experiments and Results
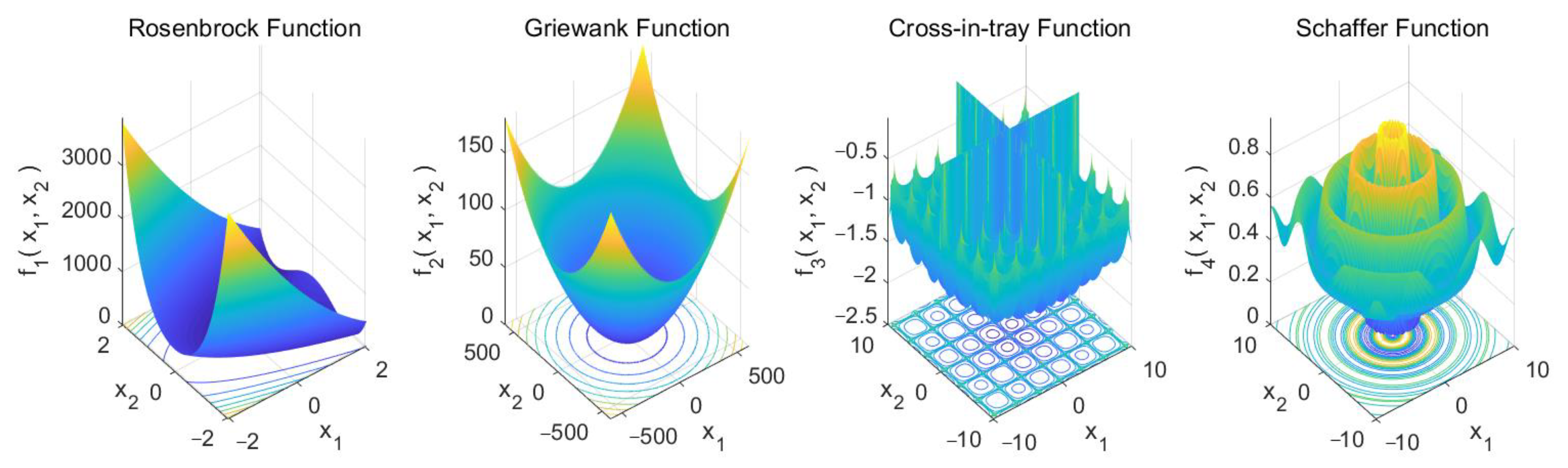
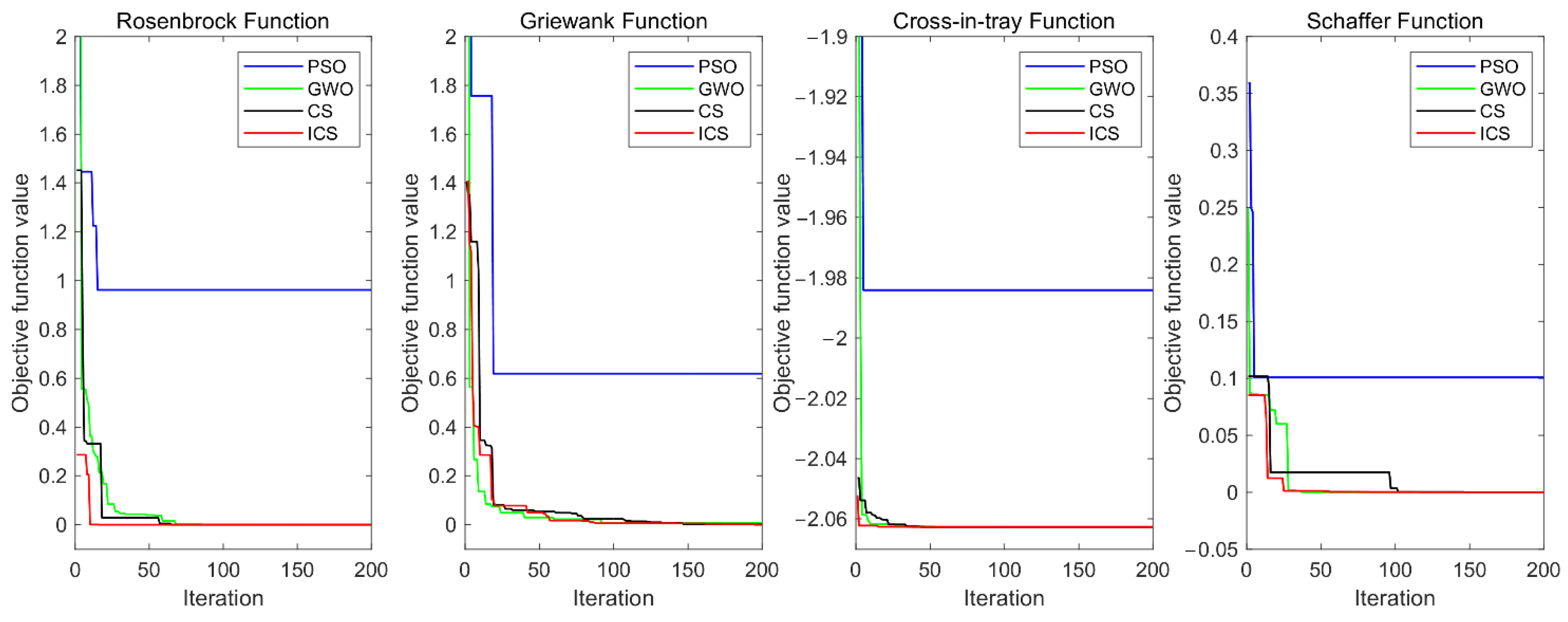
4.1. Performance Analysis of ICS Algorithm
- (1)
- Rosenbrock function:
- (2)
- Griewank function:
- (3)
- Cross-in-tray function:
- (4)
- Schaffer function:
4.2. Feature Combination Sequence Selection with GRA
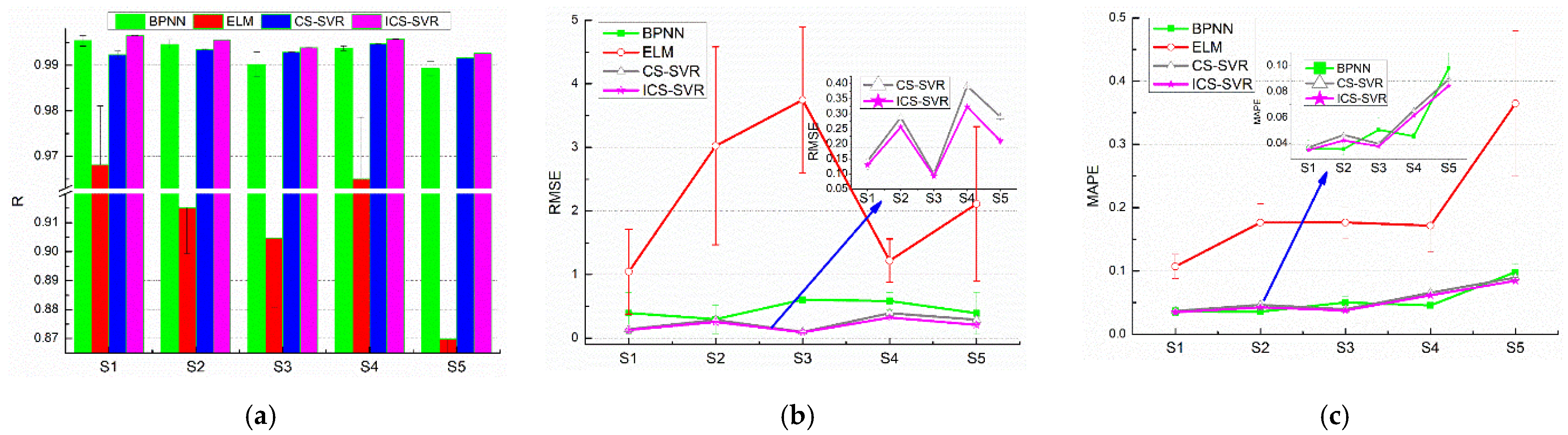
4.3. Comparative Performance of the Proposed Model with Classical Machine Learning Models
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rohlén, R.; Stålberg, E.; Stöverud, K.; Yu, J.; Grönlund, C. A Method for Identification of Mechanical Response of Motor Units in Skeletal Muscle Voluntary Contractions Using Ultrafast Ultrasound Imaging—Simulations and Experimental Tests. IEEE Access 2020, 8, 50299–50311. [Google Scholar] [CrossRef]
- Hou, J.; Sun, Y.; Sun, L.; Pan, B.; Huang, Z.; Wu, J.; Zhang, Z. A Pilot Study of Individual Muscle Force Prediction during Elbow Flexion and Extension in the Neurorehabilitation Field. Sensors 2016, 16, 2018. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, B.; Yang, C.; Xie, Q. Human-machine interfaces based on EMG and Kinect applied to teleoperation of a mobile humanoid robot. In Proceedings of the 10th World Congress on Intelligent Control and Automation (WCICA), Beijing, China, 6–8 July 2012; pp. 3903–3908. [Google Scholar]
- Ehrsson, H.H.; Fagergren, A.; Jonsson, T.; Westling, G.; Johansson, R.S.; Forssberg, H. Cortical activity in precision- versus power-grip tasks: An fMRI study. J. Neurophysiol. 2000, 83, 528–536. [Google Scholar] [CrossRef] [PubMed]
- Uwamahoro, R.; Sundaraj, K.; Subramaniam, I.D. Assessment of muscle activity using electrical stimulation and mechanomyography: A systematic review. Biomed. Eng. Online 2021, 20, 1. [Google Scholar] [CrossRef]
- Lenzi, T.; De Rossi, S.M.M.; Vitiello, N.; Carrozza, M.C. Intention-based EMG control for powered exoskeletons. IEEE Trans. Biomed. Eng. 2012, 59, 2180–2190. [Google Scholar] [CrossRef]
- Villa-Parra, A.C.; Delisle-Rodriguez, D.; López-Delis, A.; Bastos-Filho, T.; Sagaró, R.; Frizera-Neto, A. Towards a robotic knee exoskeleton control based on human motion intention through EEG and sEMG signals. Procedia Manuf. 2015, 3, 1379–1386. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Fang, L.; Zhang, Q.; Xiong, C. Simultaneous estimation of joint angle and interaction force towards sEMG-driven human-robot interaction during constrained tasks. Neurocomputing 2022, 484, 38–45. [Google Scholar] [CrossRef]
- Staudenmann, D.; Roeleveld, K.; Stegeman, D.F.; van Dieën, J.H. Methodological aspects of SEMG recordings for force estimation—A tutorial and review. J. Electromyogr. Kinesiol. 2010, 20, 375–387. [Google Scholar] [CrossRef]
- Islam, M.A.; Sundaraj, K.; Ahmad, R.B.; Ahamed, N.U. Mechanomyogram for muscle function assessment: A review. PLoS ONE 2013, 8, e58902. [Google Scholar] [CrossRef]
- Peng, L.; Hou, Z.G.; Kasabov, N.; Hu, J.; Peng, L.; Wang, W.Q. sEMG-based torque estimation for robot-assisted lower limb rehabilitation. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015; pp. 1–5. [Google Scholar]
- Wang, K.; Zhang, X.; Ota, J.; Huang, Y. Development of a SEMG-Handgrip Force Model Based on Cross Model Selection. IEEE Sens. J. 2019, 19, 1829–1838. [Google Scholar] [CrossRef]
- Song, R.; Tong, K.Y. Using recurrent artificial neural network model to estimate voluntary elbow torque in dynamic situations. Med. Biol. Eng. Comput. 2005, 43, 473–480. [Google Scholar] [CrossRef] [PubMed]
- Asheghabadi, A.S.; Moqadam, S.B.; Xu, J. Multichannel Finger Pattern Recognition Using Single-Site Mechanomyography. IEEE Sens. J. 2021, 21, 8184–8193. [Google Scholar] [CrossRef]
- Vidovic, M.M.C.; Hwang, H.J.; Amsüss, S.; Hahne, J.M.; Farina, D.; Müller, K.R. Improving the Robustness of Myoelectric Pattern Recognition for Upper Limb Prostheses by Covariate Shift Adaptation. IEEE Trans. Neural Syst. Rehabil. 2016, 24, 961–970. [Google Scholar] [CrossRef] [PubMed]
- Oster, G.; Jaffe, J.S. Low frequency sounds from sustained contraction of human skeletal muscle. Biophys. J. 1980, 30, 119–127. [Google Scholar] [CrossRef] [Green Version]
- Talib, I.; Sundaraj, K.; Lam, C.K. Choice of mechanomyography sensors for diverse types of muscle activities. IJEECE 2018, 10, 79–82. [Google Scholar]
- Beck, T.W.; Housh, T.J.; Johnson, G.O.; Weir, J.P.; Cramer, J.T.; Coburn, J.W.; Malek, M.H. Mechanomyographic amplitude and mean power frequency versus torque relationships during isokinetic and isometric muscle actions of the biceps brachii. J. Electromyogr. Kinesiol. 2004, 14, 555–564. [Google Scholar] [CrossRef]
- Beck, T.W.; Housh, T.J.; Johnson, G.O.; Cramer, J.T.; Weir, J.P.; Coburn, J.W.; Malek, M.H. Does the frequency content of the surface mechanomyographic signal reflect motor unit firing rates? A brief review. J. Electromyogr. Kinesiol. 2007, 17, 1–13. [Google Scholar] [CrossRef]
- Islam, M.A.; Sundaraj, K.; Ahmad, R.B.; Ahamed, N.U.; Ali, M.A. Mechanomyography Sensor Development, Related Signal Processing, and Applications: A Systematic Review. IEEE Sens. J. 2013, 13, 2499–2516. [Google Scholar] [CrossRef]
- Wu, H.; Wang, D.; Huang, Q.; Gao, L. Real-time continuous recognition of knee motion using multi-channel mechanomyography signals detected on clothes. J. Electromyogr. Kinesiol. 2018, 38, 94–102. [Google Scholar] [CrossRef]
- Naeem, J.; Hamzaid, N.A.; Islam, M.A.; Azman, A.W.; Bijak, M. Mechanomyography-based muscle fatigue detection during electrically elicited cycling in patients with spinal cord injury. Med. Biol. Eng. Comput. 2019, 57, 1199–1211. [Google Scholar] [CrossRef]
- Hondo, N.; Tsuji, T. Torque Estimation of Knee Flexion and Extension Movements From a Mechanomyogram of the Femoral Muscle. IEEE Trans. Neural. Syst. Rehabil. Eng. 2022, 30, 1120–1126. [Google Scholar] [CrossRef] [PubMed]
- Ibitoye, M.O.; Hamzaid, N.A.; Abdul Wahab, A.K.; Hasnan, N.; Olatunji, S.O.; Davis, G.M. Estimation of Electrically-Evoked Knee Torque from Mechanomyography Using Support Vector Regression. Sensors 2016, 16, 1115. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Youn, W.; Kim, J. Estimation of elbow flexion force during isometric muscle contraction from mechanomyography and electromyography. Med. Biol. Eng. Comput. 2010, 48, 1149–1157. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Youn, W.; Kim, J. Feasibility of using an artificial neural network model to estimate the elbow flexion force from mechanomyography. J. Neurosci. Methods 2011, 194, 386–393. [Google Scholar] [CrossRef]
- Lei, K.F.; Cheng, S.C.; Lee, M.Y.; Lin, W.Y. Measurement and estimation of muscle contraction strength using mechanomyography based on artificial neural network algorithm. Biomed. Eng. Appl. Basis Commun. 2013, 25, 1350020. [Google Scholar] [CrossRef]
- Akataki, K.; Mita, K.; Watakabe, M.; Itoh, K. Mechanomyogram and force relationship during voluntary isometric ramp contractions of the biceps brachii muscle. Eur. J. Appl. Physiol. 2001, 84, 19–25. [Google Scholar] [CrossRef]
- Beck, T.W.; Housh, T.J.; Johnson, G.O.; Weir, J.P.; Cramer, J.T.; Coburn, J.W.; Malek, M.H. Mechanomyographic and electromyographic time and frequency domain responses during submaximal to maximal isokinetic muscle actions of the biceps brachii. Eur. J. Appl. Physiol. 2004, 92, 352–359. [Google Scholar] [CrossRef]
- Xie, H.B.; Guo, J.Y.; Zheng, Y.P. Uncovering chaotic structure in mechanomyography signals of fatigue biceps brachii muscle. J. Biomech. 2010, 43, 1224–1226. [Google Scholar] [CrossRef]
- Li, C.; Ren, J.; Huang, H.; Wang, B.; Zhu, Y.; Hu, H. PCA and deep learning based myoelectric grasping control of a prosthetic hand. Biomed. Eng. Online 2018, 17, 107. [Google Scholar] [CrossRef] [Green Version]
- Subasi, A.; Gursoy, M.I. EEG signal classification using PCA, ICA, LDA and support vector machines. Expert Syst. Appl. 2010, 37, 8659–8666. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, S.; Xue, Y. An improved multiple birth support vector machine for pattern classification. Neurocomputing 2017, 225, 119–128. [Google Scholar] [CrossRef]
- Hua, X.; Ding, S. Weighted least squares projection twin support vector machines with local information. Neurocomputing 2015, 160, 228–237. [Google Scholar] [CrossRef]
- Yi, J.H.; Xu, W.H.; Chen, Y.T. Novel back propagation optimization by Cuckoo Search algorithm. Sci. World J. 2014, 2014, 878262. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Yin, T.; Lei, C.; Zhang, Y.; Wang, Y.; Liu, J. Prediction of lower limb joint angle using sEMG based on GA-GRNN. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 1894–1899. [Google Scholar]
- Wu, Q.; Zhao, X. Traffic time series prediction based on CS and SVR. In Proceedings of the Chinese Control and Decision Conference (CCDC), Shenyang, China, 9 July 2018; pp. 3427–3432. [Google Scholar]
- Yang, Y.; Zhang, M.; Dai, Y. A Fuzzy Comprehensive CS-SVR Model-based health status evaluation of radar. PLoS ONE 2019, 14, e0213833. [Google Scholar] [CrossRef] [Green Version]
- Bo, J.; Li, S.; Ma, P.; Zhu, Y.; Zhang, Y. Research on Early Warning Mechanism and Model of Liver Cancer Rehabilitation Based on CS-SVM. J. Healthc. Eng. 2021, 12, 6658776. [Google Scholar]
- Yang, X.; Deb, S. Cuckoo search: Recent advances and applications. Neural Comput. Appl. 2014, 24, 169–174. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Zhang, R.; Wang, Y.; Zhu, Z.; Zhang, J. Color difference classification based on optimization support vector machine of improved grey wolf algorithm. Optik 2018, 170, 17–29. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Cuckoo search via Levy flights. In Proceedings of the World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Sheng, Z.; Wang, J.; Zhou, S.; Zhou, B. Parameter estimation for chaotic systems using a hybrid adaptive cuckoo search with simulated annealing algorithm. Chaos 2014, 24, 013133. [Google Scholar] [CrossRef]
- Du, X.; Wang, J.; Jegatheesan, V.; Shi, G. Parameter estimation of activated sludge process based on an improved cuckoo search algorithm. Bioresour. Technol. 2018, 249, 447–456. [Google Scholar] [CrossRef]
- Alves, N.; Chau, T. Classification of the mechanomyogram: Its potential as a multifunction access pathway. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Minneapolis, MN, USA, 13 November 2009; pp. 2951–2954. [Google Scholar]
- Deng, J.L. Control problems of grey systems. Syst. Control Lett. 1982, 1, 288–294. [Google Scholar]
- Wang, H.; Wang, L.; Yang, L.; Shi, X.; Wen, Z.; Dong, X. Exploring the relationship between the dielectric properties and viability of human normal hepatic tissues from 10 Hz to 100 MHz based on grey relational analysis and BP neural network. Comput. Biol. Med. 2021, 134, 104494. [Google Scholar] [CrossRef] [PubMed]
- Zuniga, J.M.; Housh, T.J.; Camic, C.L.; Hendrix, C.R.; Mielke, M.; Schmidt, R.J.; Johnson, G.O. The effects of accelerometer placement on mechanomyographic amplitude and mean power frequency during cycle ergometry. J. Electromyogr. Kinesiol. 2010, 20, 719–725. [Google Scholar] [CrossRef] [PubMed]
- Torres, A.; Fiz, J.A.; Jane, R.; Laciar, E.; Galdiz, J.B.; Gea, J.; Morera, J. Rényi entropy and Lempel-Ziv complexity of mechanomyographic recordings of diaphragm muscle as indexes of respiratory effort. In Proceedings of the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 2112–2115. [Google Scholar]
- Lima, C.A.M.; Coelho, A.L.V.; Madeo, R.C.B.; Peres, S.M. Classification of electromyography signals using relevance vector machines and fractal dimension. Neural Comput. Appl. 2016, 27, 791–804. [Google Scholar] [CrossRef]
- Li, P.; Karmakar, C.; Yan, C.; Palaniswami, M.; Liu, C. Classification of 5-S Epileptic EEG Recordings Using Distribution Entropy and Sample Entropy. Front. Physiol. 2016, 7, 136. [Google Scholar] [CrossRef] [Green Version]
- Xue, Y.; Ji, X.; Zhou, D.; Li, J.; Ju, Z. SEMG-Based Human In-Hand Motion Recognition Using Nonlinear Time Series Analysis and Random Forest. IEEE Access 2019, 7, 176448–176457. [Google Scholar] [CrossRef]
- Chen, X.; Chen, J.; Liang, J.; Li, Y.; Courtney, C.A.; Yang, Y. Entropy-Based Surface Electromyogram Feature Extraction for Knee Osteoarthritis Classification. IEEE Access 2019, 7, 164144–164151. [Google Scholar] [CrossRef]
- Cuong-Le, T.; Hoang-Le, M.; Samir, K.; Magd, A.W.; Minh, T.T.; Seyedali, M. A novel version of Cuckoo search algorithm for solving optimization problems. Expert Syst. Appl. 2021, 186, 115669. [Google Scholar] [CrossRef]
- Jamil, M.; Yang, X.S. A Literature Survey of Benchmark Functions for Global Optimization Problems. Mathematics 2013, 4, 150–194. [Google Scholar]
- Artemiadis, P.K.; Kyriakopoulos, K.J. EMG-Based Control of a Robot Arm Using Low-Dimensional Embeddings. IEEE Trans. Rob. 2010, 26, 393–398. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter |
|---|---|
| PSO | c1 = c2 = 1, k = 0.5, wV = 0.9, wP = 0.9 |
| GWO | r1, r2 ∈ (0, 1), a ∈ (0, 2) |
| CS | |
| ICS |
| Test Function | Algorithm | Optimal Solution | Worst Solution | Average Solution | SD |
|---|---|---|---|---|---|
| Rosenbrock function | PSO | 0.0142 | 3.9689 | 1.0774 | 1.0380 |
| GWO | 4.377 × 10−7 | 2.503 × 10−4 | 2.383 × 10−5 | 4.341 × 10−5 | |
| CS | 1.389 × 10−13 | 3.605 × 10−4 | 7.822 × 10−6 | 5.093 × 10−5 | |
| ICS | 1.816 × 10−13 | 9.313 × 10−7 | 4.922 × 10−8 | 1.541 × 10−7 | |
| Griewank function | PSO | 0.3838 | 13.0372 | 1.7129 | 1.8178 |
| GWO | 0 | 0.0271 | 0.0054 | 0.0056 | |
| CS | 9.678 × 10−7 | 0.0089 | 0.0044 | 0.0031 | |
| ICS | 2.618 × 10−6 | 0.0081 | 0.0025 | 0.0029 | |
| Cross-in-tray function | PSO | −2.0622 | −1.8755 | −2.0260 | 0.0438 |
| GWO | −2.0626 | −2.0626 | −2.0626 | 1.257 × 10−7 | |
| CS | −2.0626 | −2.0626 | −2.0626 | 6.519 × 10−11 | |
| ICS | −2.0626 | −2.0626 | −2.0626 | 3.352 × 10−11 | |
| Schaffer function | PSO | 0.0113 | 0.2443 | 0.0940 | 0.0391 |
| GWO | 0 | 0.0851 | 0.0204 | 0.0367 | |
| CS | 4.749 × 10−7 | 0.0851 | 0.0019 | 0.0120 | |
| ICS | 2.113 × 10−9 | 0.0085 | 6.824 × 10−4 | 0.0016 |
| Combination | RMSE | MAPE | R |
|---|---|---|---|
| Feature combination A | 0.1768 | 0.0405 | 0.9963 |
| Feature combination B | 0.7493 | 0.0377 | 0.9954 |
| Feature combination C | 0.1611 | 0.0416 | 0.9946 |
| Feature combination D | 0.1319 | 0.0349 | 0.9966 |
| Feature combination E | 0.4282 | 0.0327 | 0.9957 |
| Combination | RMSE ± SD | MAPE ± SD | R ± SD |
|---|---|---|---|
| Feature combination A | 0.7511 ± 0.7645 | 0.0550 ± 0.0120 | 0.9937 ± 0.0042 |
| Feature combination B | 0.6012 ± 0.3840 | 0.0604 ± 0.0190 | 0.9912 ± 0.0046 |
| Feature combination C | 0.6706 ± 0.5202 | 0.0649 ± 0.0241 | 0.9920 ± 0.0026 |
| Feature combination D | 0.2761± 0.2396 | 0.0522± 0.0208 | 0.9949± 0.0016 |
| Feature combination E | 0.8214 ± 0.6718 | 0.0644 ± 0.0464 | 0.9916 ± 0.0059 |
| Model | RMSE | MAPE | R |
|---|---|---|---|
| BPNN | 0.3952 ± 0.3246 | 0.0361 ± 0.0064 | 0.9954 ± 0.0012 |
| ELM | 1.0464 ± 0.6673 | 0.1071 ± 0.0190 | 0.9681 ± 0.0130 |
| CS-SVR | 0.1424 ± 0.0274 | 0.0358 ± 0.0026 | 0.9923 ± 0.0008 |
| ICS-SVR | 0.1295±0.0021 | 0.0349±8.06 × 10−6 | 0.9966±1.38 × 10−6 |
| Model | RMSE | MAPE | R |
|---|---|---|---|
| BPNN | 0.4706 ± 0.1299 | 0.0575 ± 0.0241 | 0.9919 ± 0.0022 |
| ELM | 2.5252 ± 0.9507 | 0.2223 ± 0.0822 | 0.9137 ± 0.0341 |
| CS-SVR | 0.2673 ± 0.1061 | 0.0603 ± 0.0193 | 0.9932 ± 0.0011 |
| ICS-SVR | 0.2205±0.0840 | 0.0565±0.0185 | 0.9945±0.0013 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Gao, L.; Lu, W.; Wang, D.; Cao, H.; Zhang, G. Estimation of Knee Extension Force Using Mechanomyography Signals Based on GRA and ICS-SVR. Sensors 2022, 22, 4651. https://doi.org/10.3390/s22124651
Li Z, Gao L, Lu W, Wang D, Cao H, Zhang G. Estimation of Knee Extension Force Using Mechanomyography Signals Based on GRA and ICS-SVR. Sensors. 2022; 22(12):4651. https://doi.org/10.3390/s22124651
Chicago/Turabian StyleLi, Zebin, Lifu Gao, Wei Lu, Daqing Wang, Huibin Cao, and Gang Zhang. 2022. "Estimation of Knee Extension Force Using Mechanomyography Signals Based on GRA and ICS-SVR" Sensors 22, no. 12: 4651. https://doi.org/10.3390/s22124651
APA StyleLi, Z., Gao, L., Lu, W., Wang, D., Cao, H., & Zhang, G. (2022). Estimation of Knee Extension Force Using Mechanomyography Signals Based on GRA and ICS-SVR. Sensors, 22(12), 4651. https://doi.org/10.3390/s22124651