
ARG-Mask RCNN: An Infrared Insulator Fault-Detection Network Based on Improved Mask RCNN


Abstract
:1. Introduction
- (1)
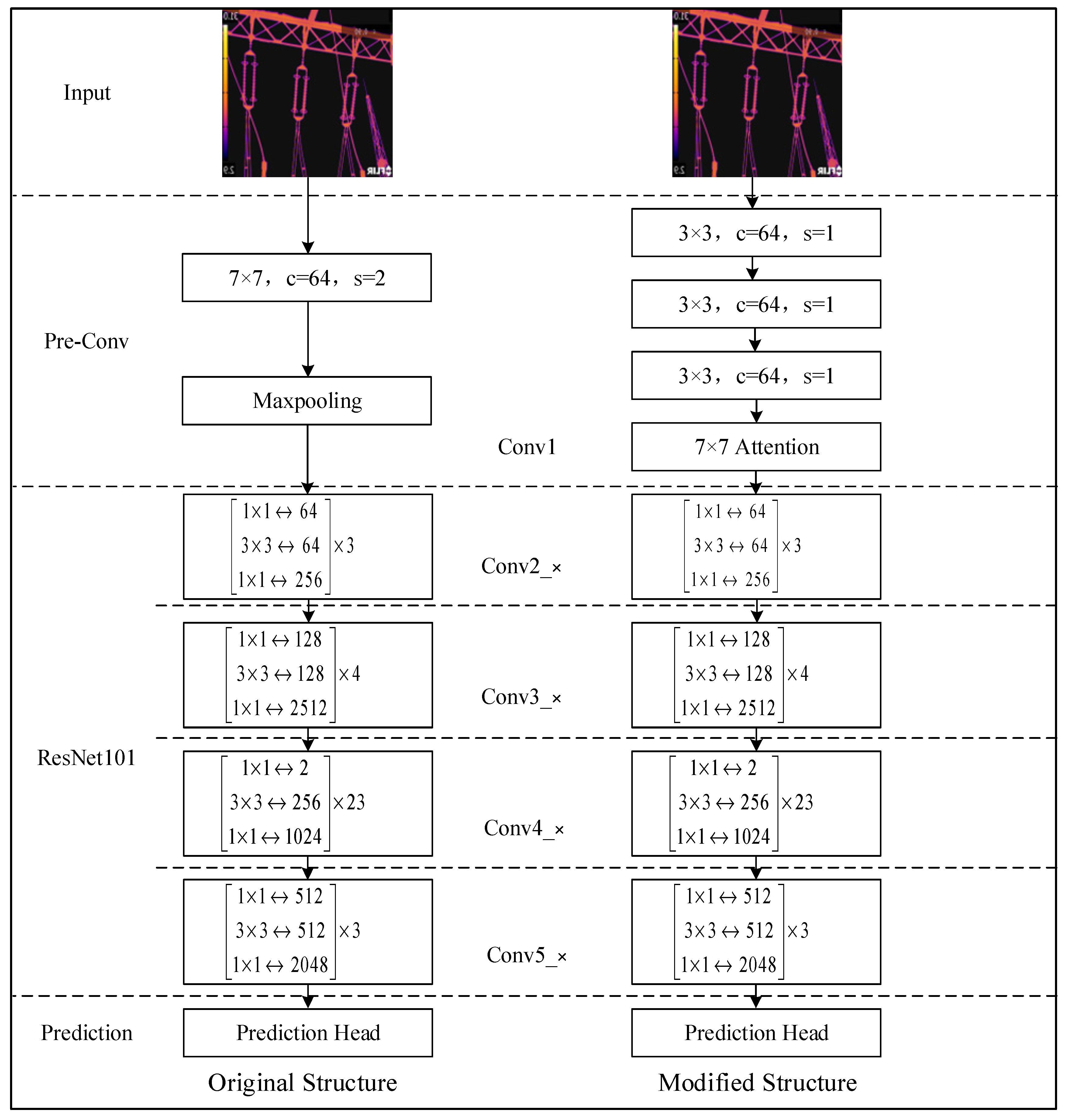
- A new backbone network is proposed to improve the capability of fault feature extraction.
- (2)
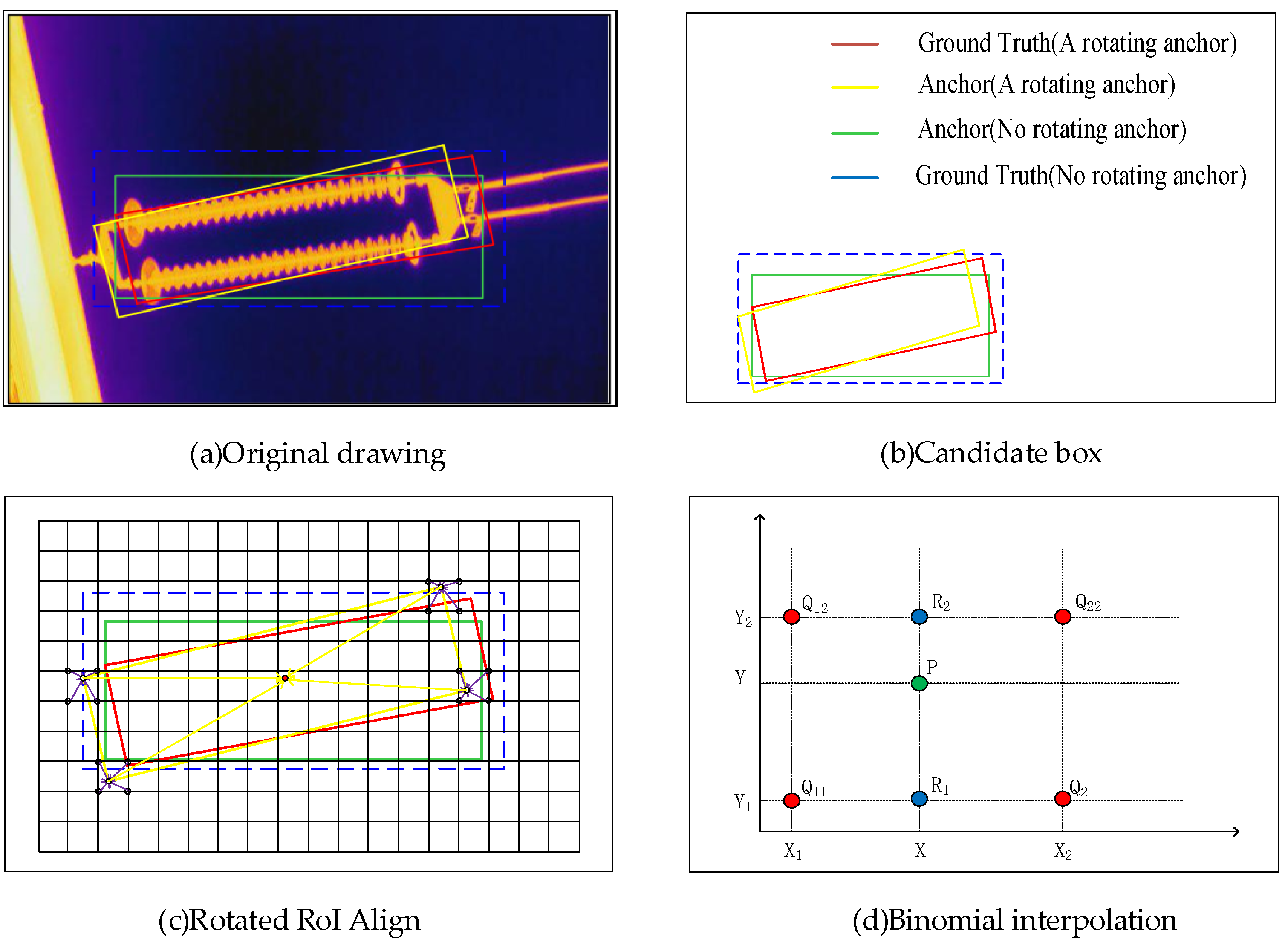
- A rotated anchor box is proposed to reduce the extraneous background in the prediction box.
- (3)
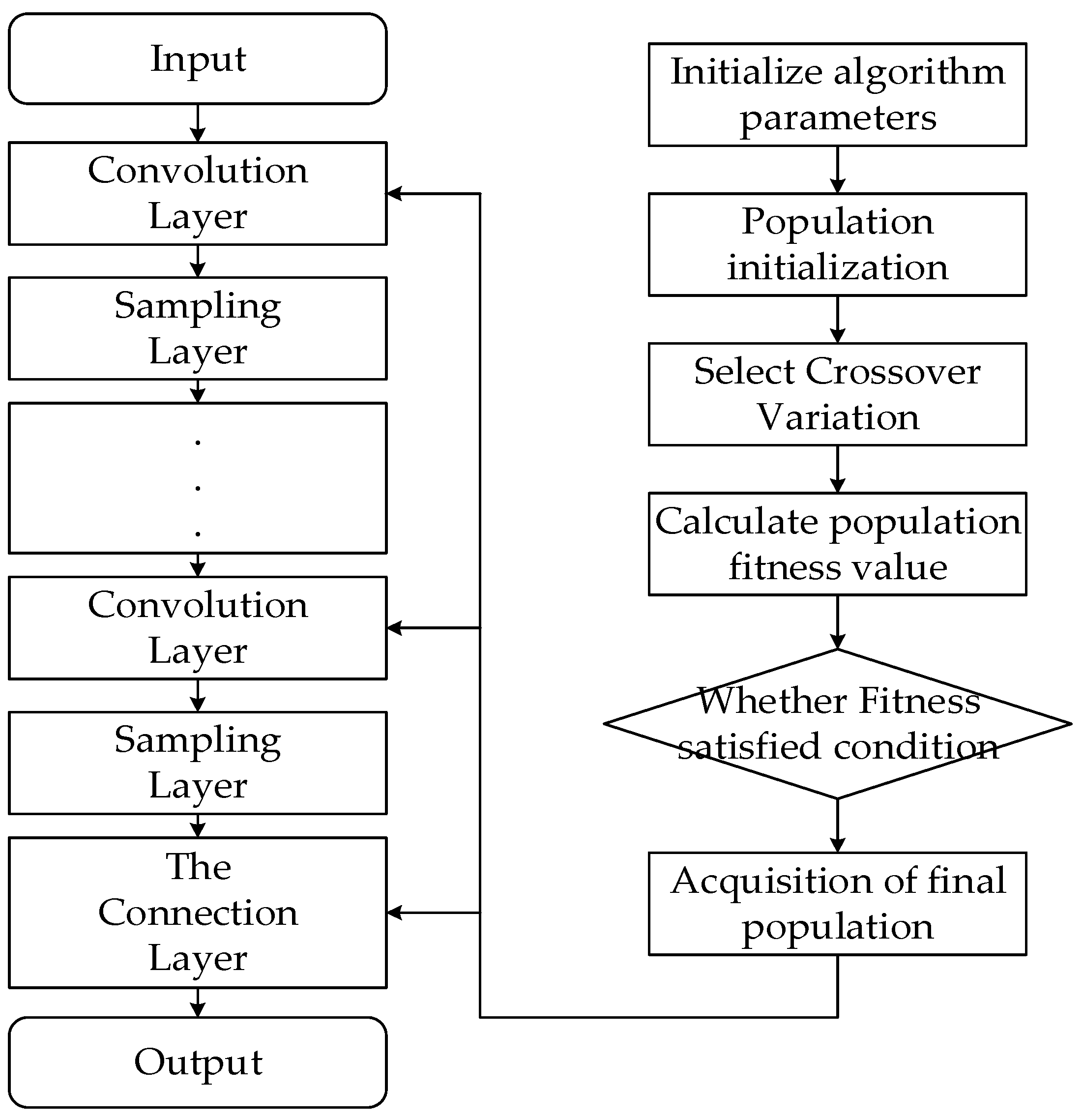
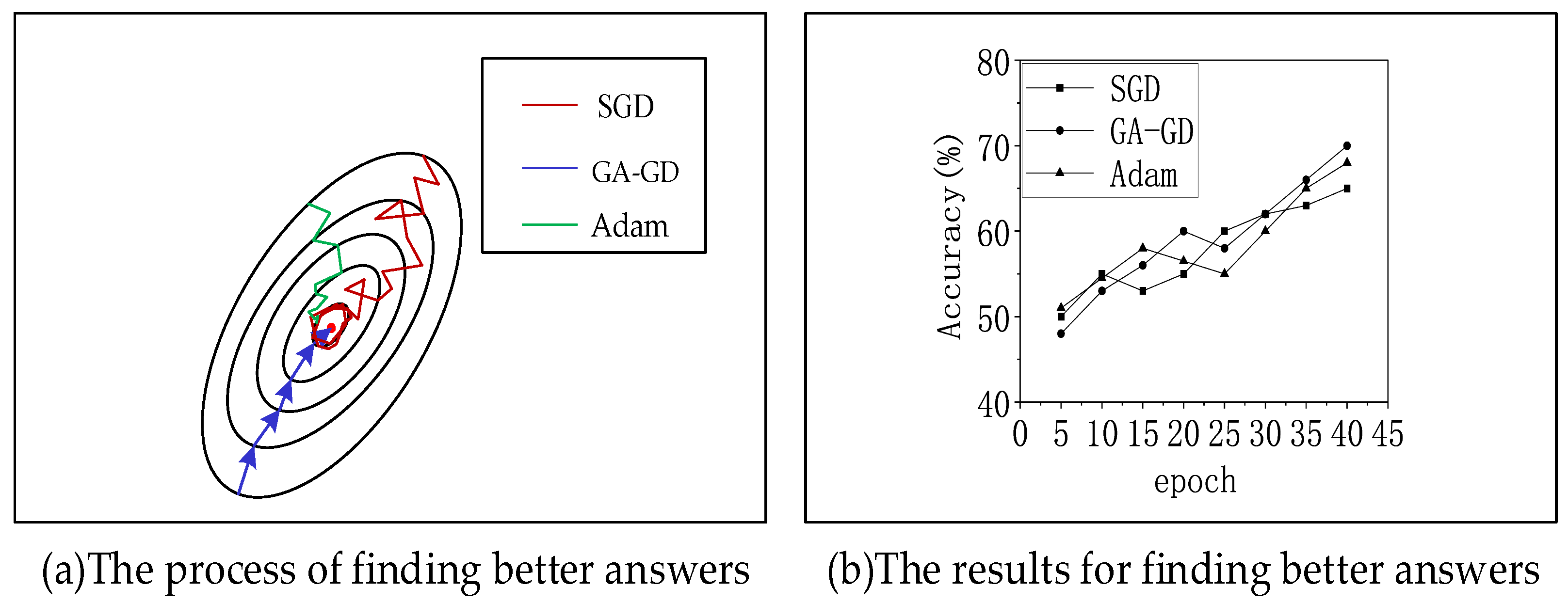
- The genetic algorithm combined with the gradient descent method is proposed to optimize the parameters so that the model is as close to the global optimal solution as possible, and the detection accuracy of the model is improved.
- (4)
- By comparing with several optimal insulator fault-identification algorithms, the superiority of the proposed method is confirmed.
2. Related Work
2.1. Data Sources
- (1)
- Compared with other fault-diagnosis data, infrared imaging data has the following outstanding characteristics. (I) The data collection is convenient, and the work efficiency is high. It only takes a few hours to complete the collection of a large amount of data with the drone. (II) During the actual inspection, it can be obtained without touching the equipment to avoid product damage caused by improper operation during inspection. (III) A variety of typical faults can be detected, and the location of the faulty insulator sheet and the degree of damage can be located. (IV) Infrared light can detect the internal characteristics of the equipment when it is running. The location of the fault can be identified by the color of the light, which is related to its fault principle, while it is difficult to find faults caused by cracks and internal defects with visible light.
- (2)
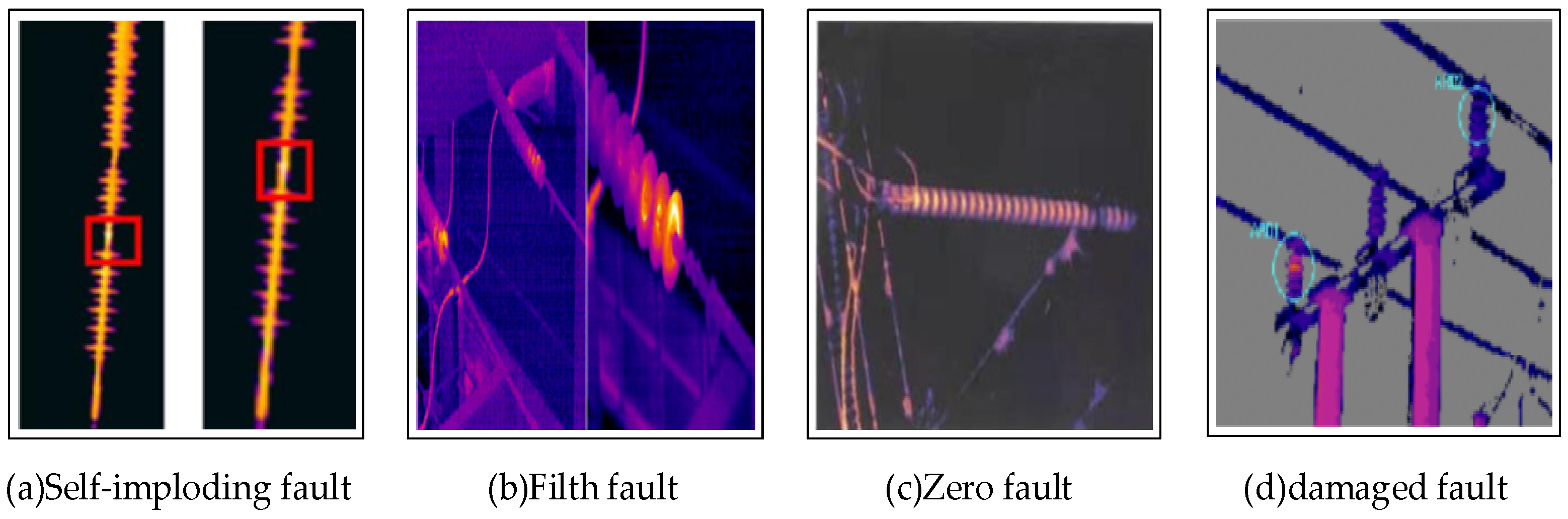
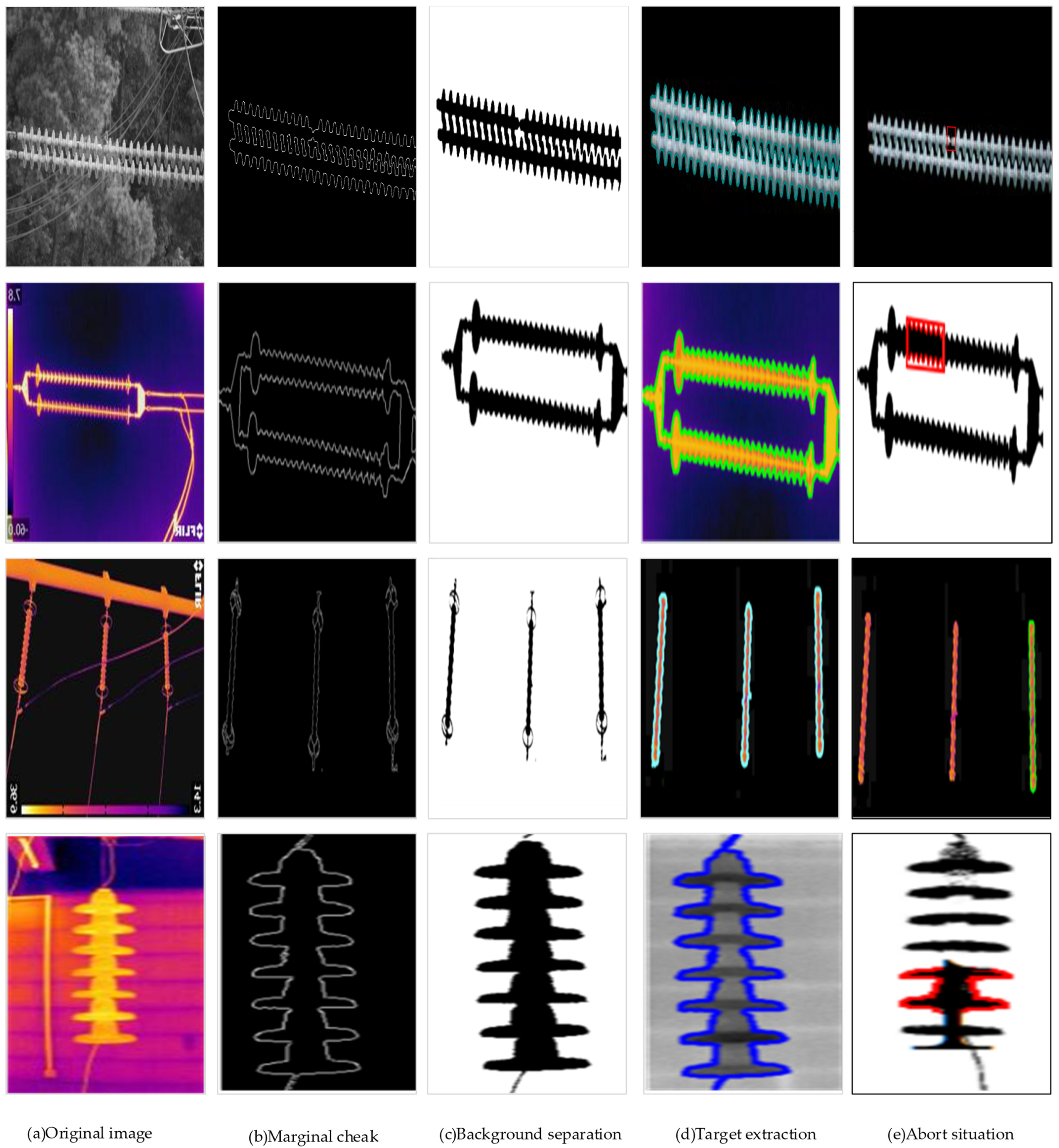
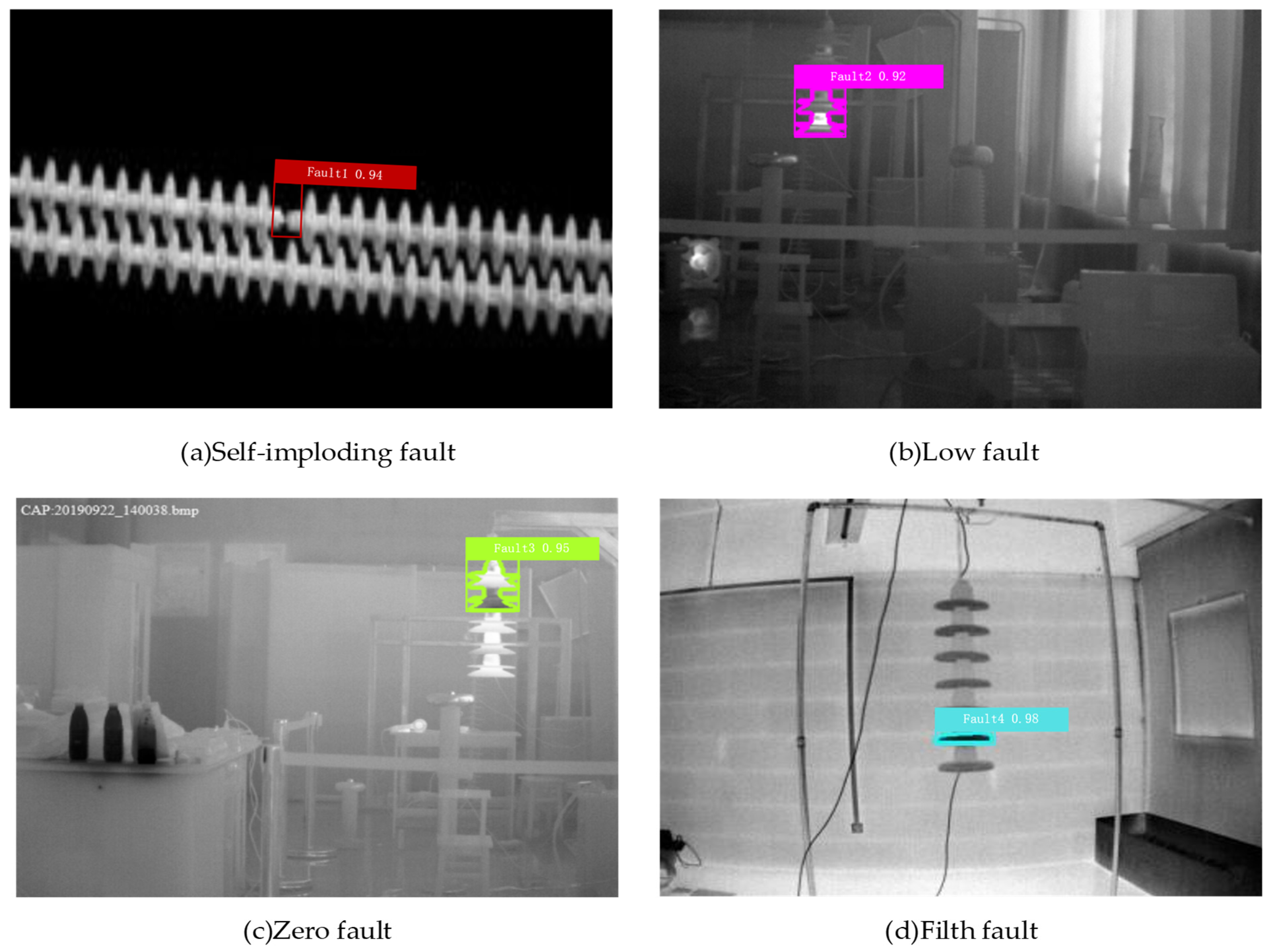
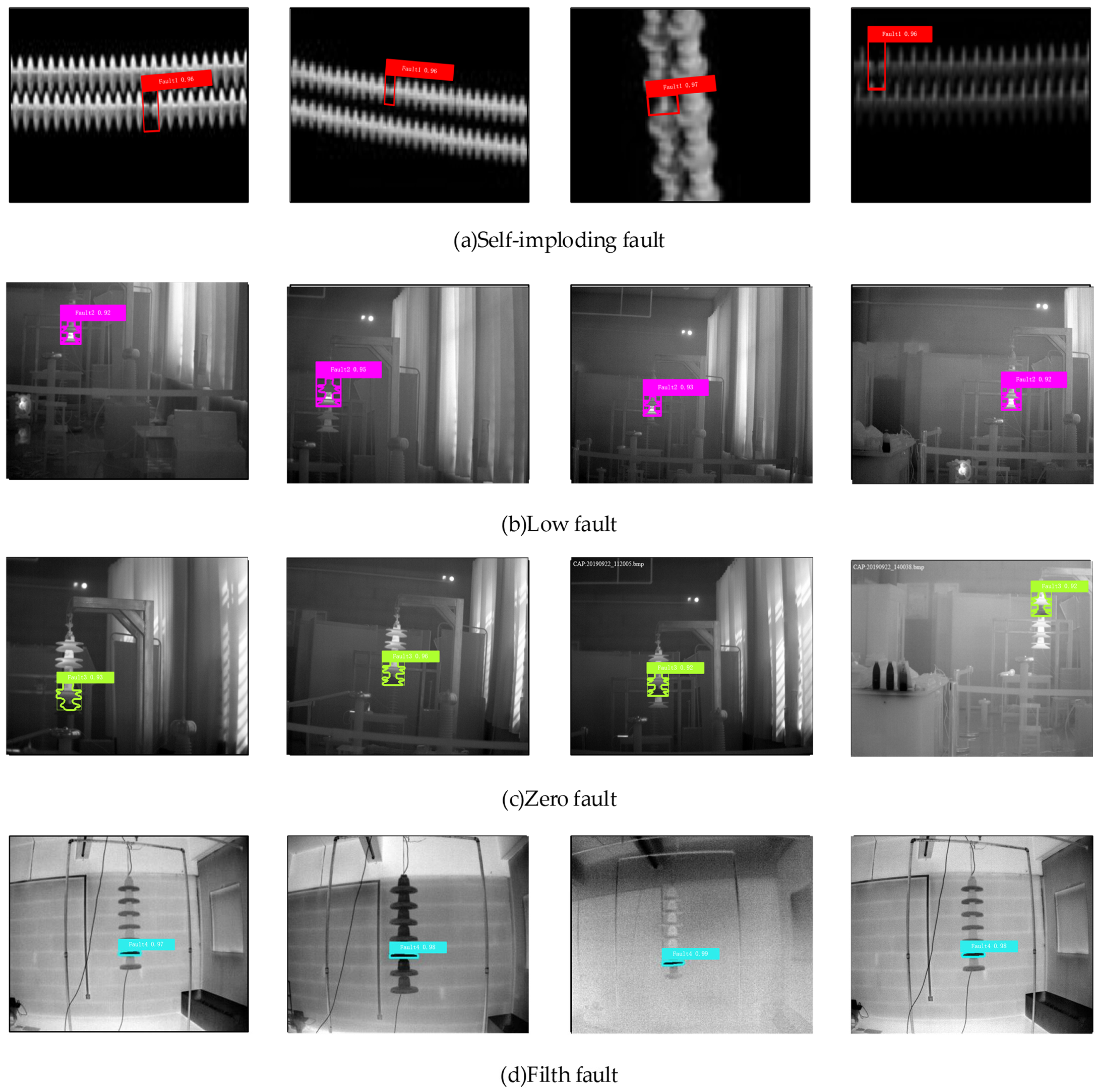
- To detect a variety of different faults of insulators, it is necessary to determine which type of fault is caused when the data set is marked. The quality of the data set will directly affect the identification of faulty insulators. To avoid confusion and the inability to identify different fault types, the following will introduce the characteristics of four typical infrared faults in detail.
- (3)
- When collecting data on insulators outdoors, to accurately reflect the temperature of each insulator, the following points should be noted. (I) Weather conditions—avoid collecting in bad weather such as strong wind, strong light, rain, and snow, which will cause the detected device temperature to be inaccurate. (II) The collection time should be selected as early as possible in the morning or the evening when the surface temperature of the insulator is in a relatively stable state. (III) The measurement position should cover the overall map of the insulator string as much as possible. If it is the first measurement, it should keep a certain distance from the equipment to avoid damage to the equipment caused by operation errors.
2.2. Mask RCNN Network
2.2.1. Network Model
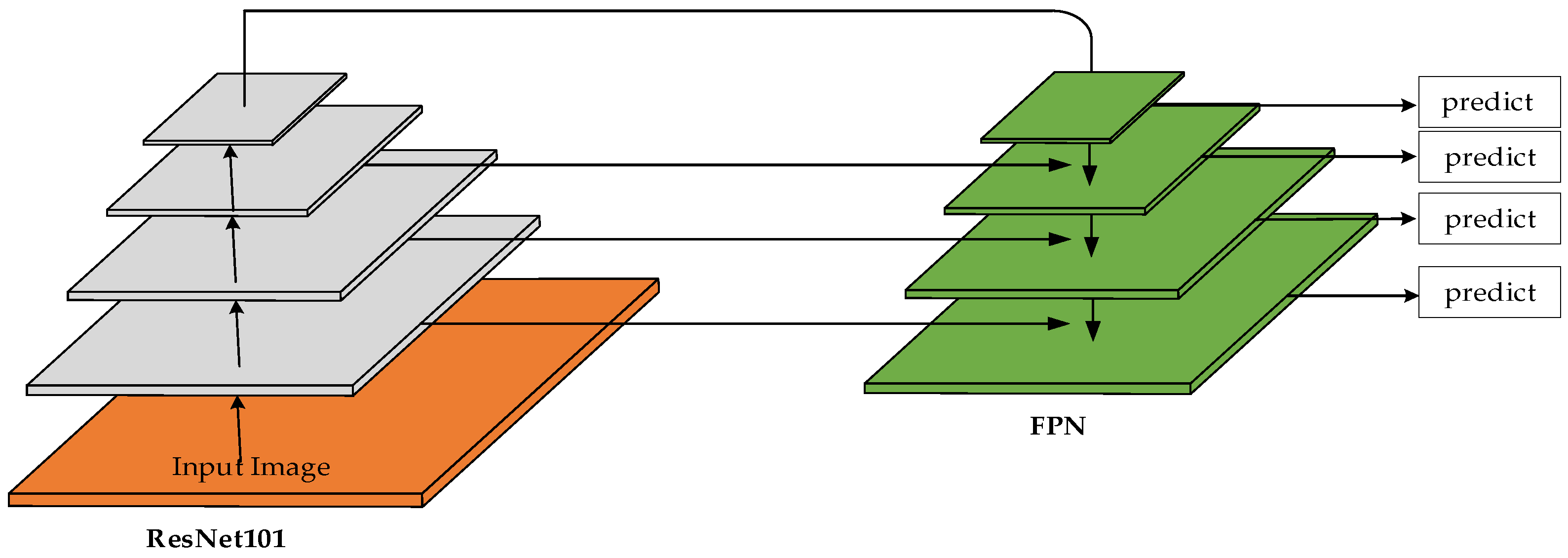
- Backbone network
- Pixel Prediction (Mask Prediction)
- Region of Interest Align (RoI Align)
2.2.2. Loss Function
- Classification parameters:
- Cross entropy loss function:
- Regression parameters:
- SmoothL1 Loss error function:
3. ARG-Mask RCNN Algorithm
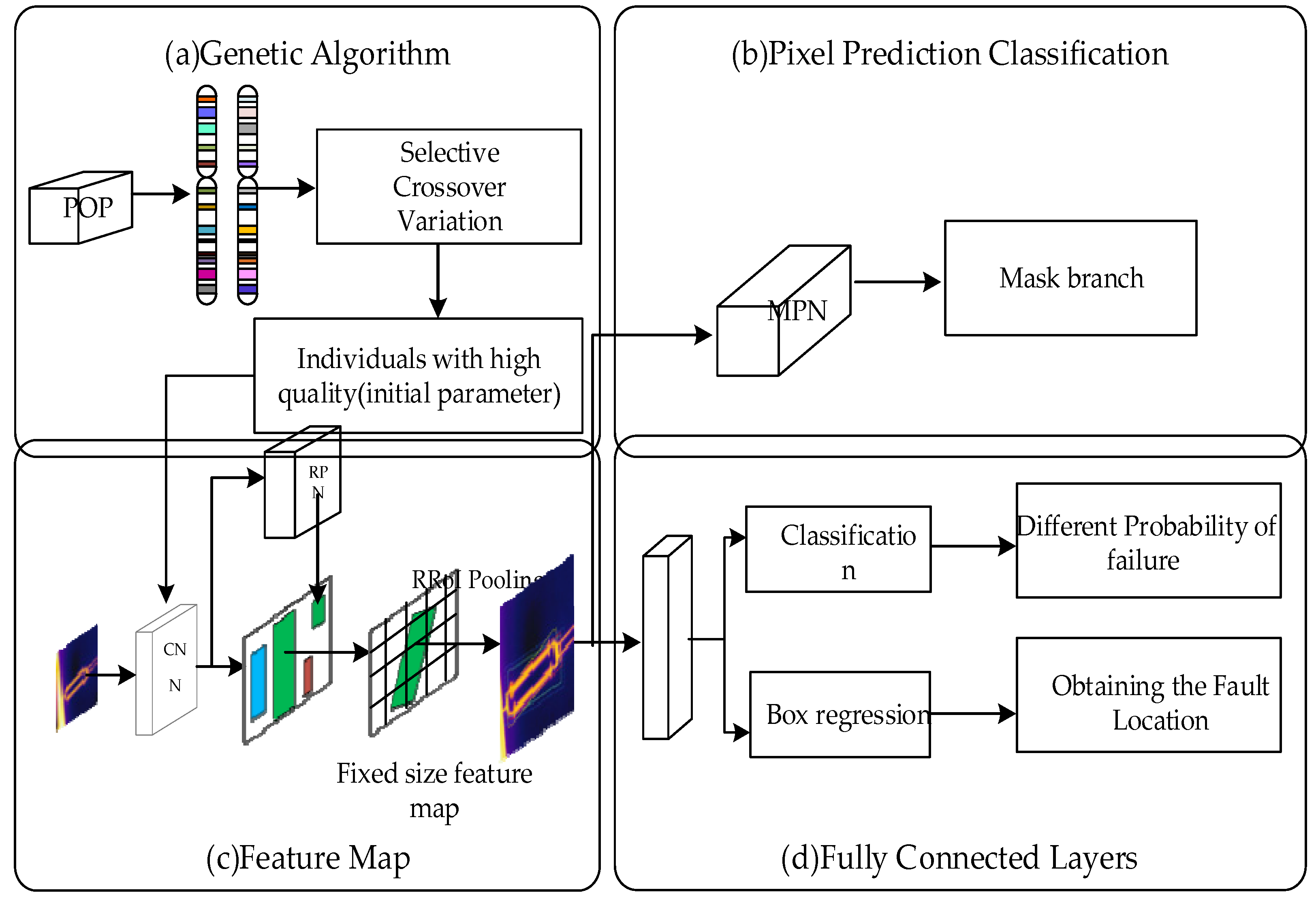
3.1. ARG-Mask RCNN Overall Model Framework
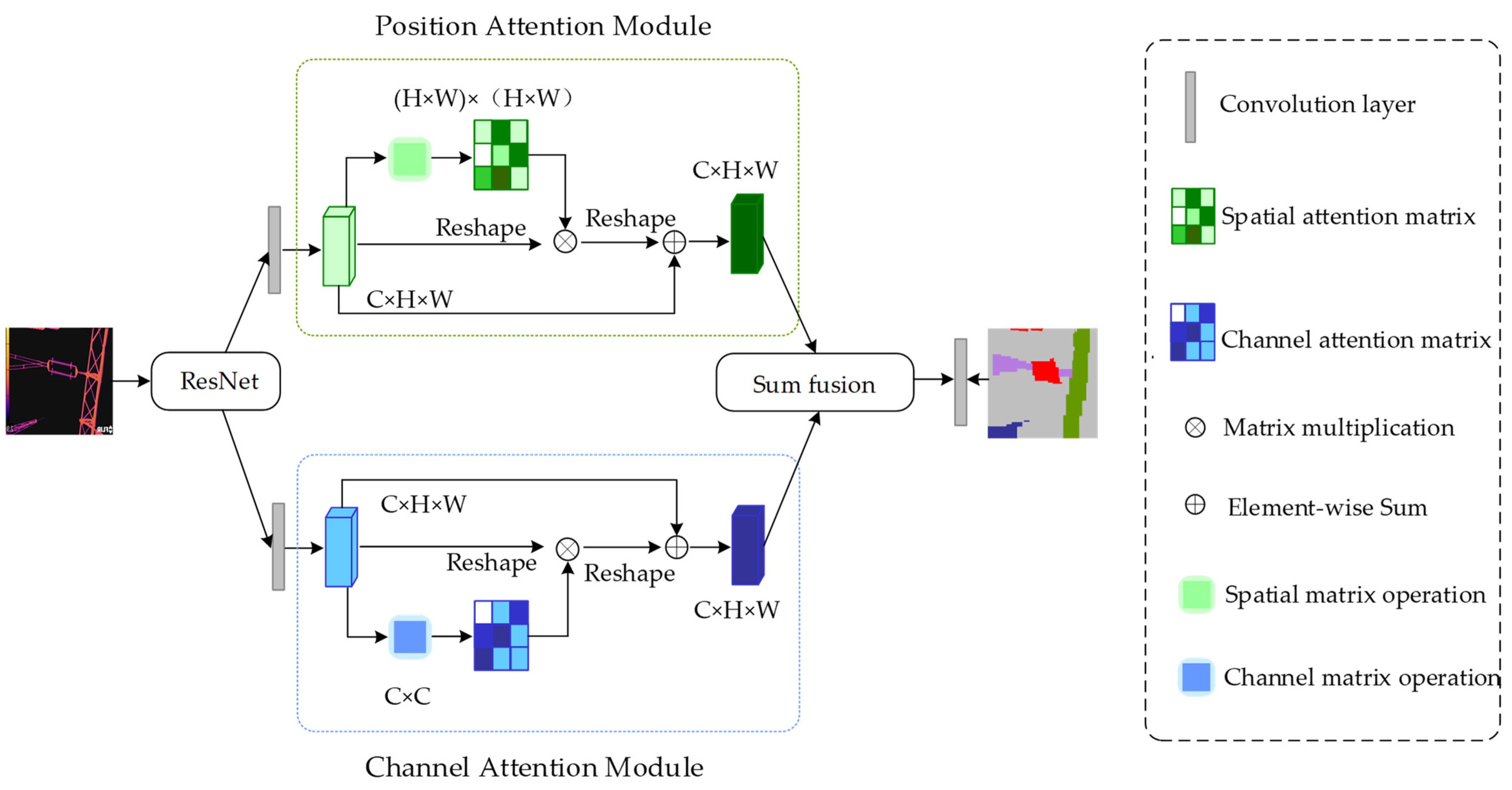
3.2. ARG-Mask RCNN Backbone Network
3.3. ARG-Mask RCNN Loss Function
3.4. ARG-Mask RCNN Parameter Update
3.5. ARG-Mask RCNN Algorithm Implementation Steps
4. Simulation Experiment
4.1. Experimental Environment
4.2. Experimental Results and Analysis
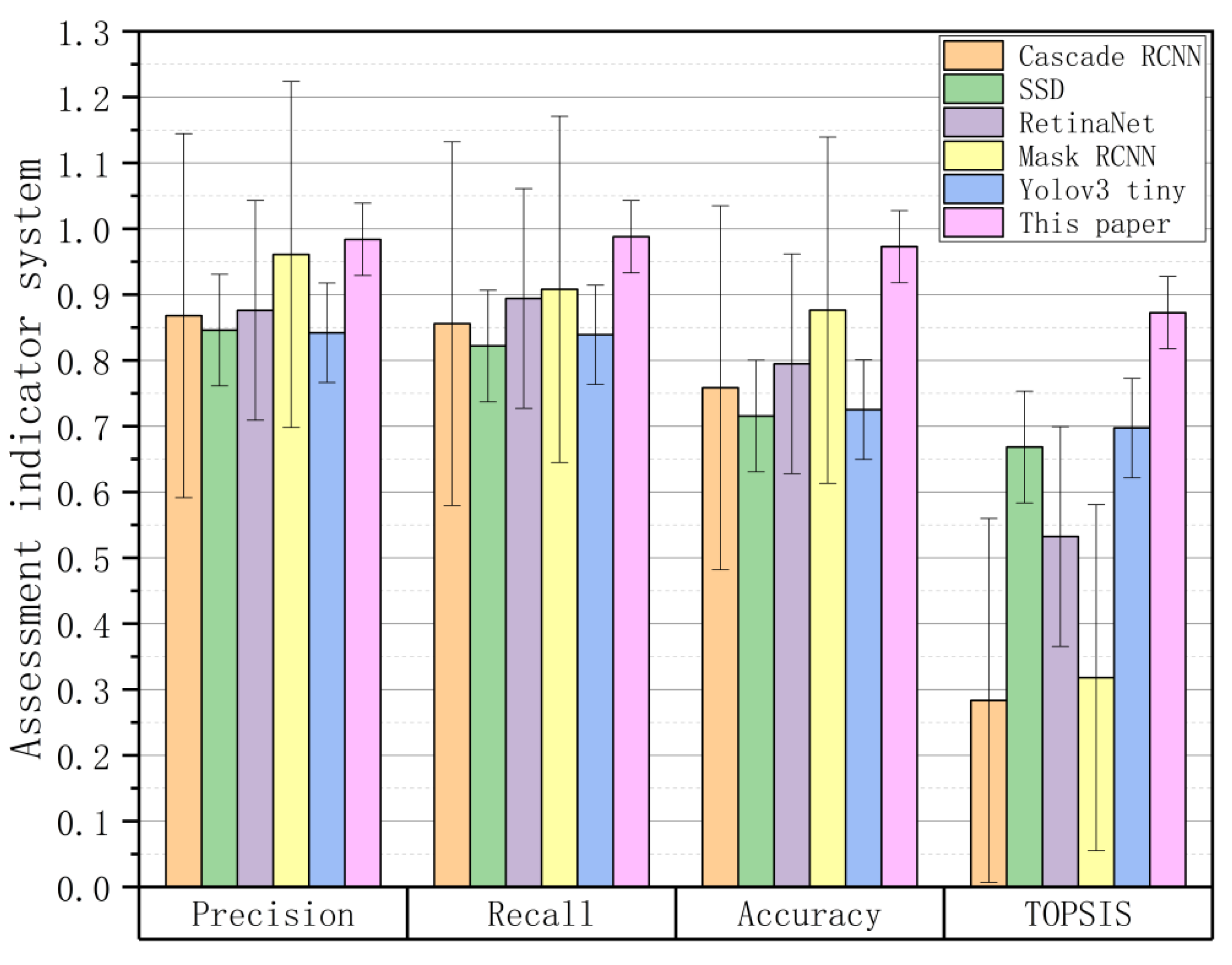
4.3. ARG-Mask RCNN Performance Test
5. Discussion and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lammers, W.M.; Collopy, M.W. Effectiveness of avian predator perch deterrents on electric transmission lines. J. Wildl. Manag. 2007, 71, 2752–2758. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, X.; Jia, J.; Liu, X. A recognition technology of transmission lines conductor break and surface damage based on aerial image. IEEE Access 2019, 7, 59022–59036. [Google Scholar] [CrossRef]
- Liu, Y.; Ji, X.; Pei, S.; Ma, Z.; Zhang, G.; Lin, Y.; Chen, Y. Research on automatic location and recognition of insulators in substation based on YOLOv3. High Volt. 2020, 5, 62–68. [Google Scholar] [CrossRef]
- Amin, M.; Amin, S.; Ali, M. Monitoring of leakage current for composite insulators and electrical devices. Rev. Adv. Mater. Sci 2009, 21, 75–89. [Google Scholar]
- McDermid, W.; Grant, D.; Glodjo, A.; Bromley, J. Analysis of converter transformer failures and application of periodic on-line partial discharge measurements. In Proceedings of the Electrical Insulation Conference and Electrical Manufacturing and Coil Winding Conference (Cat. No. 01CH37264), Cincinnati, OH, USA, 18 October 2001; IEEE: Piscataway, NJ, USA, 2001; pp. 577–582. [Google Scholar]
- Yuan, C.; Xie, C.; Li, L.; Zhang, F.; Gubanski, S.M. Ultrasonic phased array detection of internal defects in composite insulators. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 525–531. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, N.; Wang, L. Localization of multiple insulators by orientation angle detection and binary shape prior knowledge. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 3421–3428. [Google Scholar] [CrossRef]
- Altaf, M.; Akram, T.; Khan, M.A.; Iqbal, M.; Ch, M.M.I.; Hsu, C.-H. A New Statistical Features Based Approach for Bearing Fault Diagnosis Using Vibration Signals. Sensors 2022, 22, 2012. [Google Scholar] [CrossRef]
- Henao, H.; Capolino, G.-A.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in fault diagnosis for electrical machines: A review of diagnostic techniques. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Deng, H.; He, Z.; Chen, L. Ultrasonic guided wave-based detection of composite insulator debonding. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 3586–3593. [Google Scholar] [CrossRef]
- Ji, Y.; Tao, X.; Jianjun, T.; Lan, X.; Zhan-long, Z. Online detection system for contaminated insulators based on ultra-violet pulse method. In Proceedings of the 2007 Annual Report-Conference on Electrical Insulation and Dielectric Phenomena, Vancouver, BC, Canada, 14–17 October 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 558–561. [Google Scholar]
- Cheng, L.; Wang, L.; Mei, H.; Guan, Z.; Zhang, F. Research of nondestructive methods to test defects hidden within composite insulators based on THz time-domain spectroscopy technology. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 2126–2133. [Google Scholar] [CrossRef]
- Tong, K.; Wu, Y.; Zhou, F. Recent advances in small object detection based on deep learning: A review. Image Vis. Comput. 2020, 97, 103910. [Google Scholar] [CrossRef]
- Farzaneh, M.; Baker, A.C.; Bernstorf, R.A.; Burnhan, J.T.; Cherney, E.A.; Chisholm, W.A.; Gorur, R.S.; Grisham, T.; Gutman, I.; Rolfseng, L. Selection of line insulators with respect to ice and Snow—Part I: Context and stresses. IEEE Trans. Power Deliv. 2007, 22, 2289–2296. [Google Scholar] [CrossRef]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6154–6162. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Liu, X.; Li, Y.; Shuang, F.; Gao, F.; Zhou, X.; Chen, X. Issd: Improved ssd for insulator and spacer online detection based on uav system. Sensors 2020, 20, 6961. [Google Scholar] [CrossRef]
- Tan, M.; Chen, B.; Pang, R.; Vasudevan, V.; Sandler, M.; Howard, A.; Le, Q.V. Mnasnet: Platform-aware neural architecture search for mobile. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 2820–2828. [Google Scholar]
- Wen, Q.; Luo, Z.; Chen, R.; Yang, Y.; Li, G. Deep learning approaches on defect detection in high resolution aerial images of insulators. Sensors 2021, 21, 1033. [Google Scholar] [CrossRef]
- Liu, J.; Jia, R.; Li, W.; Ma, F.; Abdullah, H.M.; Ma, H.; Mohamed, M.A. High precision detection algorithm based on improved RetinaNet for defect recognition of transmission lines. Energy Rep. 2020, 6, 2430–2440. [Google Scholar] [CrossRef]
- Arthur, D.; Vassilvitskii, S. k-Means++: The Advantages of Careful Seeding; Stanford University: Stanford, CA, USA, 2006. [Google Scholar]
- Liu, C.; Wu, Y.; Liu, J.; Han, J. MTI-YOLO: A light-weight and real-time deep neural network for insulator detection in complex aerial images. Energies 2021, 14, 1426. [Google Scholar] [CrossRef]
- Wang, B.; Dong, M.; Ren, M.; Wu, Z.; Guo, C.; Zhuang, T.; Pischler, O.; Xie, J. Automatic fault diagnosis of infrared insulator images based on image instance segmentation and temperature analysis. IEEE Trans. Instrum. Meas. 2020, 69, 5345–5355. [Google Scholar] [CrossRef]
- Kirillov, A.; Girshick, R.; He, K.; Dollár, P. Panoptic feature pyramid networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 6399–6408. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Fu, J.; Liu, J.; Tian, H.; Li, Y.; Bao, Y.; Fang, Z.; Lu, H. Dual attention network for scene segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3146–3154. [Google Scholar]
- Sastry, K.; Goldberg, D.; Kendall, G. Genetic algorithms. In Search Methodologies; Springer: Berlin/Heidelberg, Germany, 2005; pp. 97–125. [Google Scholar]
- Bottou, L. Stochastic gradient descent tricks. In Neural Networks: Tricks of the Trade; Springer: Berlin/Heidelberg, Germany, 2012; pp. 421–436. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Abhishree, T.; Latha, J.; Manikantan, K.; Ramachandran, S. Face recognition using Gabor filter based feature extraction with anisotropic diffusion as a pre-processing technique. Procedia Comput. Sci. 2015, 45, 312–321. [Google Scholar] [CrossRef] [Green Version]
- Mao, Q.; Hu, F.; Hao, Q. Deep learning for intelligent wireless networks: A comprehensive survey. IEEE Commun. Surv. Tutor. 2018, 20, 2595–2621. [Google Scholar] [CrossRef]
- Herdade, S.; Kappeler, A.; Boakye, K.; Soares, J. Image captioning: Transforming objects into words. Adv. Neural Inf. Processing Syst. 2019, 32. [Google Scholar]
- Issac, J.; Wüthrich, M.; Cifuentes, C.G.; Bohg, J.; Trimpe, S.; Schaal, S. Depth-based object tracking using a robust gaussian filter. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 6–21 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 608–615. [Google Scholar]
- Xuan, L.; Hong, Z. An improved canny edge detection algorithm. In Proceedings of the 2017 8th IEEE International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 24–26 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 275–278. [Google Scholar]
- Tao, X.; Zhang, D.; Wang, Z.; Liu, X.; Zhang, H.; Xu, D. Detection of power line insulator defects using aerial images analyzed with convolutional neural networks. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 1486–1498. [Google Scholar] [CrossRef]
- Zhang, Z.; Huang, S.; Li, Y.; Li, H.; Hao, H. Image Detection of Insulator Defects Based on Morphological Processing and Deep Learning. Energies 2022, 15, 2465. [Google Scholar] [CrossRef]
- Zhou, T.; Tulsiani, S.; Sun, W.; Malik, J.; Efros, A.A. View synthesis by appearance flow. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016; pp. 286–301. [Google Scholar]
- Lasko, T.A.; Bhagwat, J.G.; Zou, K.H.; Ohno-Machado, L. The use of receiver operating characteristic curves in biomedical informatics. J. Biomed. Inform. 2005, 38, 404–415. [Google Scholar] [CrossRef] [Green Version]
- Al-Bashiri, H.; Abdulgabber, M.A.; Romli, A.; Kahtan, H. An improved memory-based collaborative filtering method based on the TOPSIS technique. PLoS ONE 2018, 13, e0204434. [Google Scholar] [CrossRef]
- Koslowsky, B.; Jacob, H.; Eliakim, R.; Adler, S. PillCam ESO in esophageal studies: Improved diagnostic yield of 14 frames per second (fps) compared with 4 fps. Endoscopy 2006, 38, 27–30. [Google Scholar] [CrossRef]
- Li, G.; Alcala, C.F.; Qin, S.J.; Zhou, D. Generalized reconstruction-based contributions for output-relevant fault diagnosis with application to the Tennessee Eastman process. IEEE Trans. Control. Syst. Technol. 2010, 19, 1114–1127. [Google Scholar] [CrossRef]
- Wang, J.; Fu, P.; Gao, R.X. Machine vision intelligence for product defect inspection based on deep learning and Hough transform. J. Manuf. Syst. 2019, 51, 52–60. [Google Scholar] [CrossRef]
- Lin, A.; Liu, Y.; Zhang, L. Mushroom Detection and Positioning Method Based on Neural Network. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1174–1178. [Google Scholar]
- Mao, H.; Netravali, R.; Alizadeh, M. Neural adaptive video streaming with pensieve. In Proceedings of the Conference of the ACM Special Interest Group on Data Communication, Los Angeles, CA, USA, 21–25 August 2017; pp. 197–210. [Google Scholar]
- Xu, L.; Chow, M.-Y. A classification approach for power distribution systems fault cause identification. IEEE Trans. Power Syst. 2006, 21, 53–60. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Jiang, Q. A robust and high-precision automatic reading algorithm of pointer meters based on machine vision. Meas. Sci. Technol. 2018, 30, 015401. [Google Scholar] [CrossRef]
- Ling, Z.; Zhang, D.; Qiu, R.C.; Jin, Z.; Zhang, Y.; He, X.; Liu, H. An accurate and real-time method of self-blast glass insulator location based on faster R-CNN and U-net with aerial images. CSEE J. Power Energy Syst. 2019, 5, 474–482. [Google Scholar]
- Guo, C.; Ren, M.; Xia, C.; Dong, M.; Wang, B. Fault diagnosis of power equipment based on infrared image analysis. In Proceedings of the 2020 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 25–27 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 659–663. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Model or Parameter Value |
|---|---|
| Central Processing Unit (CPU) | Intel i5-7300HQ |
| RAM/GB | 128 |
| Graphics Processing Unit (GPU) | An RTX 3080Ti |
| Operating System | Window 10 |
| Software Environment | Anaconda3, Cuda11.3, Python3.7 |
| Development Tools | Pycharm |
| Deep Learning Libraries | PyTorch |
| Parameter | Value |
|---|---|
| weight decay | 0.0001 |
| learning rate | 0.001 |
| number of iterations | 100 |
| number of training rounds | 60 |
| Method | Backbone | True Positive (TP) | False Positive (FP) | False Negative (FN) | True Negative (TN) | Precision | Recall |
|---|---|---|---|---|---|---|---|
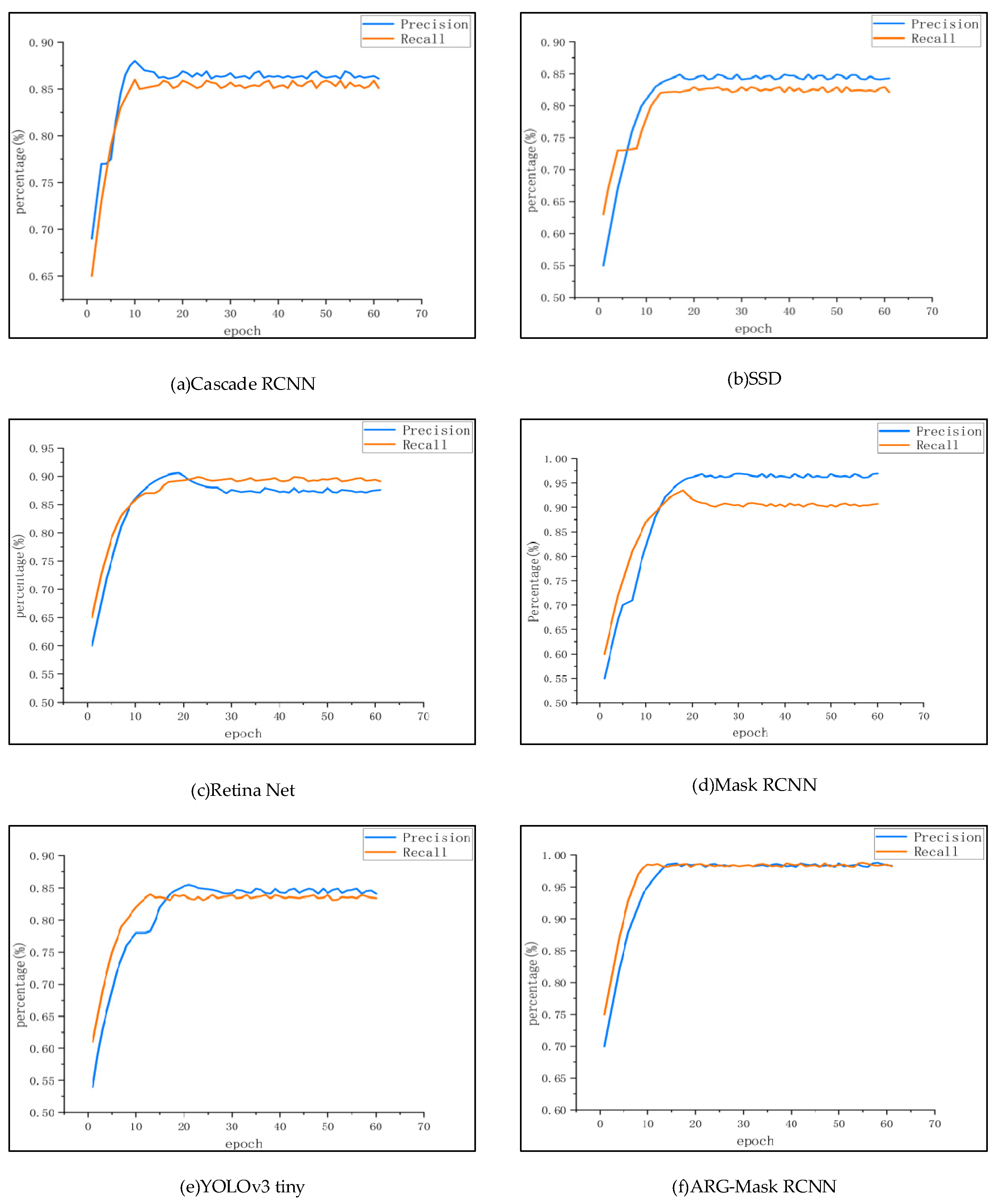
| Cascade RCNN | ResNet-101 + FPN | 125 | 19 | 21 | 0 | 0.868 | 0.856 |
| SSD | VGG-16 | 231 | 42 | 50 | 0 | 0.846 | 0.822 |
| Retina Net | ResNet-101 + FPN | 254 | 36 | 30 | 0 | 0.876 | 0.894 |
| Mask RCNN | ResNet-101 + FPN | 268 | 11 | 27 | 0 | 0.961 | 0.908 |
| Yolov3 tiny | DarkNet-53 | 354 | 66 | 68 | 0 | 0.842 | 0.839 |
| ARG-Mask RCNN | Improved ResNet-101 + FPN | 316 | 5 | 4 | 0 | 0.984 | 0.988 |
| Class | Cascade RCNN | SSD | Retina Net | Mask RCNN | YOLOv3 Tiny | ARG-Mask RCNN |
|---|---|---|---|---|---|---|
| Self-imploding fault (%) | 76.96 | 72.63 | 79.69 | 87.65 | 73.42 | 97.66 |
| Low fault (%) | 67.32 | 64.38 | 81.47 | 86.12 | 74.38 | 96.82 |
| Zero fault (%) | 75.31 | 75.59 | 79.46 | 82.73 | 73.91 | 95.46 |
| Filth fault (%) | 83.81 | 73.64 | 77.34 | 94.02 | 68.33 | 99.18 |
| Mean Accuracy (%) | 75.85 | 71.56 | 79.49 | 87.63 | 72.51 | 97.28 |
| FPS | 1.84 | 5.97 | 4.56 | 3.27 | 6.41 | 5.75 |
| Times | 0.54 | 0.17 | 0.22 | 0.31 | 0.16 | 0.17 |
| TOPSIS | 0.2834 | 0.6684 | 0.5324 | 0.2180 | 0.6973 | 0.8725 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, M.; Wang, J.; Li, B. ARG-Mask RCNN: An Infrared Insulator Fault-Detection Network Based on Improved Mask RCNN. Sensors 2022, 22, 4720. https://doi.org/10.3390/s22134720
Zhou M, Wang J, Li B. ARG-Mask RCNN: An Infrared Insulator Fault-Detection Network Based on Improved Mask RCNN. Sensors. 2022; 22(13):4720. https://doi.org/10.3390/s22134720
Chicago/Turabian StyleZhou, Ming, Jue Wang, and Bo Li. 2022. "ARG-Mask RCNN: An Infrared Insulator Fault-Detection Network Based on Improved Mask RCNN" Sensors 22, no. 13: 4720. https://doi.org/10.3390/s22134720
APA StyleZhou, M., Wang, J., & Li, B. (2022). ARG-Mask RCNN: An Infrared Insulator Fault-Detection Network Based on Improved Mask RCNN. Sensors, 22(13), 4720. https://doi.org/10.3390/s22134720