
Optimization of Joint Decision of Transport Mode and Path in Multi-Mode Freight Transportation Network


Abstract
:1. Introduction
2. Literature Review
3. Methodology
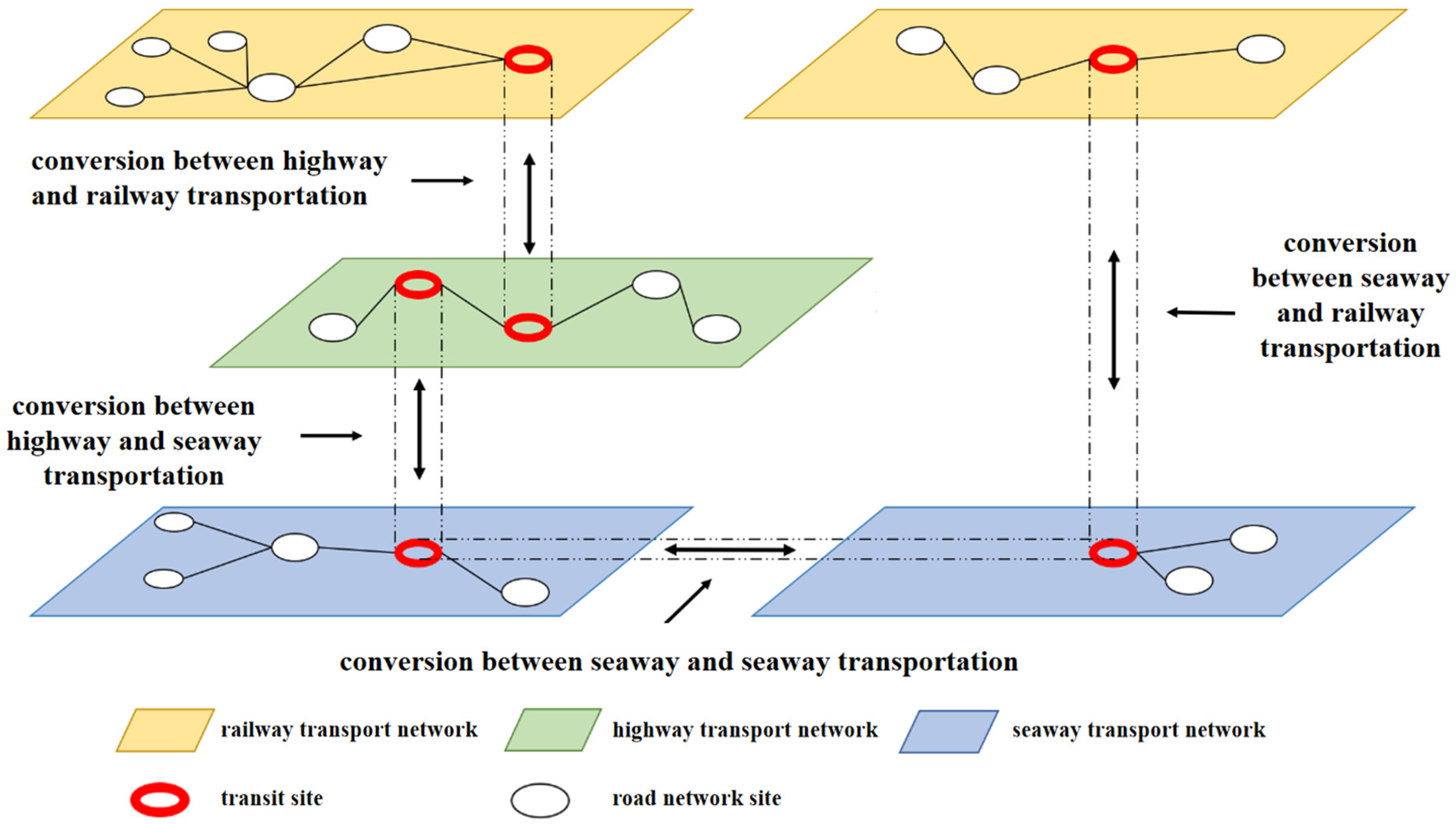
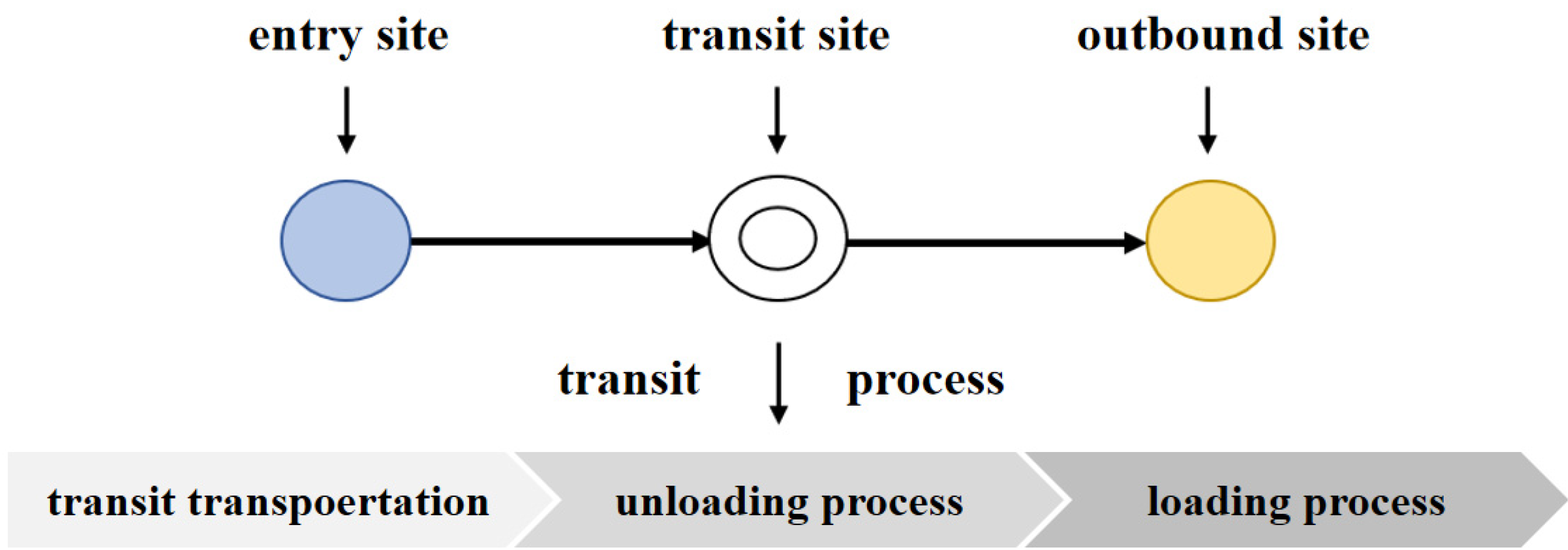
3.1. Construction of Multi-Mode Transportation Network
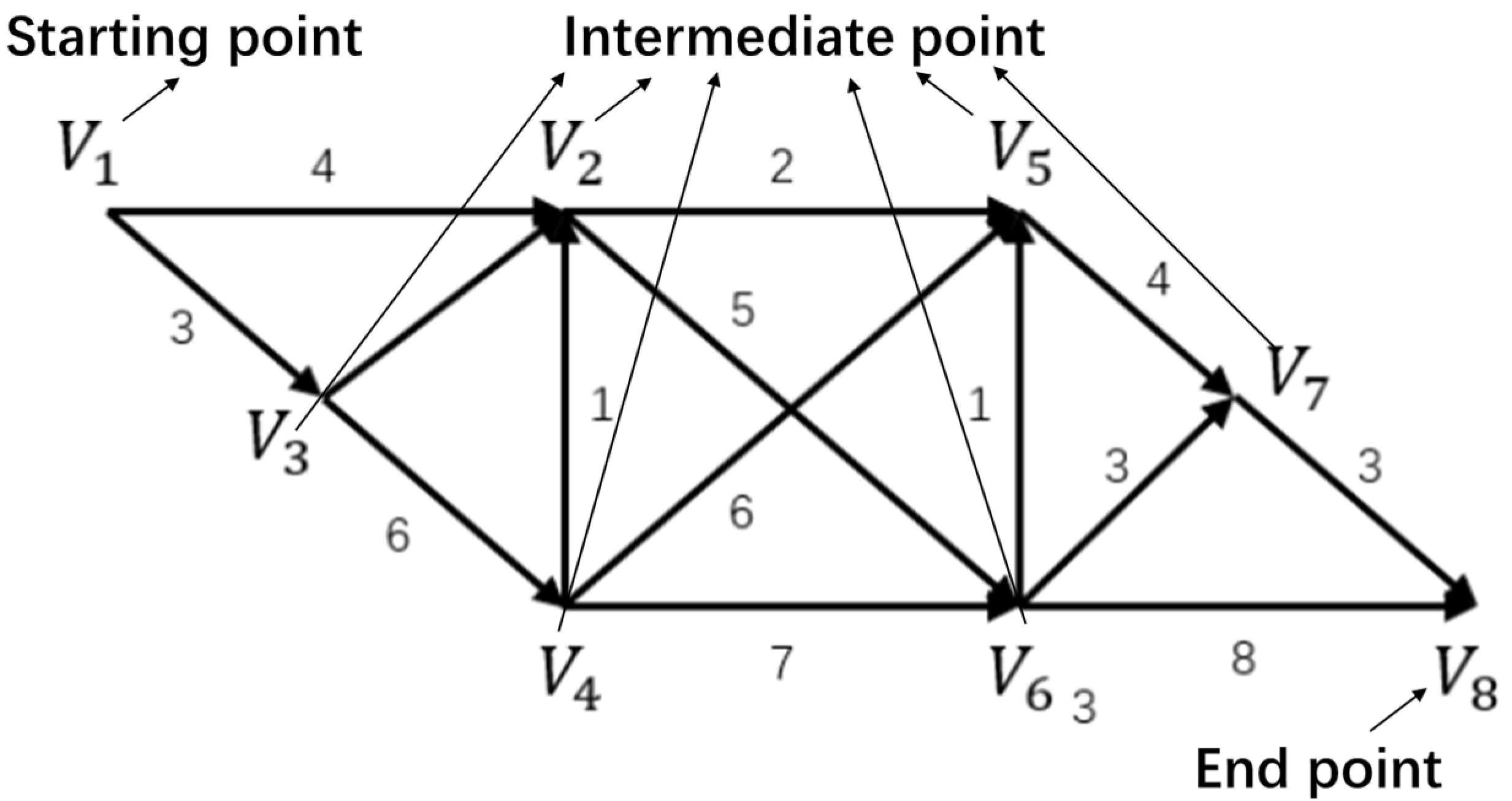
3.2. Dijkstra Algorithm for the Shortest Path Problem
- dij—distance (weight) from Vi to Vj;
- T(j)—the T label obtained at the point Vj before the k-round labeling.
- Tl—V1 nonadjacent points Vi obtained with T number.
3.3. Multi-Objective Optimization Algorithm for Solving Optimal Path
4. Experimental Design
4.1. Transportation Plan Model
4.1.1. Model Assumptions
- Only one mode of transportation can be selected between two transfer stations.
- Goods can only be transported in batches without disassembly and assembly between nodes.
- There are resource constraints such as transportation time, transportation cost, maximum risk, personnel, and equipment in the whole transportation process.
- Considering the changes in various indicators under time-varying conditions (which means parameter values can be different in a different time), plans are made under typical scenarios.
- The maintenance of personnel and equipment between two means of transport is not considered.
- The number and characteristics of vehicles are not considered.
- Because the loading and unloading risk is much smaller than the transportation risk, the loading and unloading risk will not be considered when calculating the total transportation risk.
- It is assumed that the goods will be loaded and unloaded immediately after arriving at the transfer site. The following transportation section is carried out directly after loading and unloading, without intermediate waiting time.
4.1.2. Notation
4.1.3. Model Building
5. Analysis of Optimization of Transportation Plan in Multi-Mode
5.1. Results of Case Study
5.1.1. Determination of Total Objective Function by Analytic Hierarchy Process
- (1)
- Transport risk function (R).
- ①
- Use a pre-decided relative weight scale to construct judgment matrix A:
- ②
- Hierarchical single sorting to determine the weight vector. The maximum eigenvalue of the matrix and its corresponding eigenvector can be obtained as:λ = 4.1154
- ③
- Consistency test.
- (2)
- Transport time function (C).
- (3)
- Transportation cost function (C).
- (4)
- Total objective function.
- (5)
- Constraints.
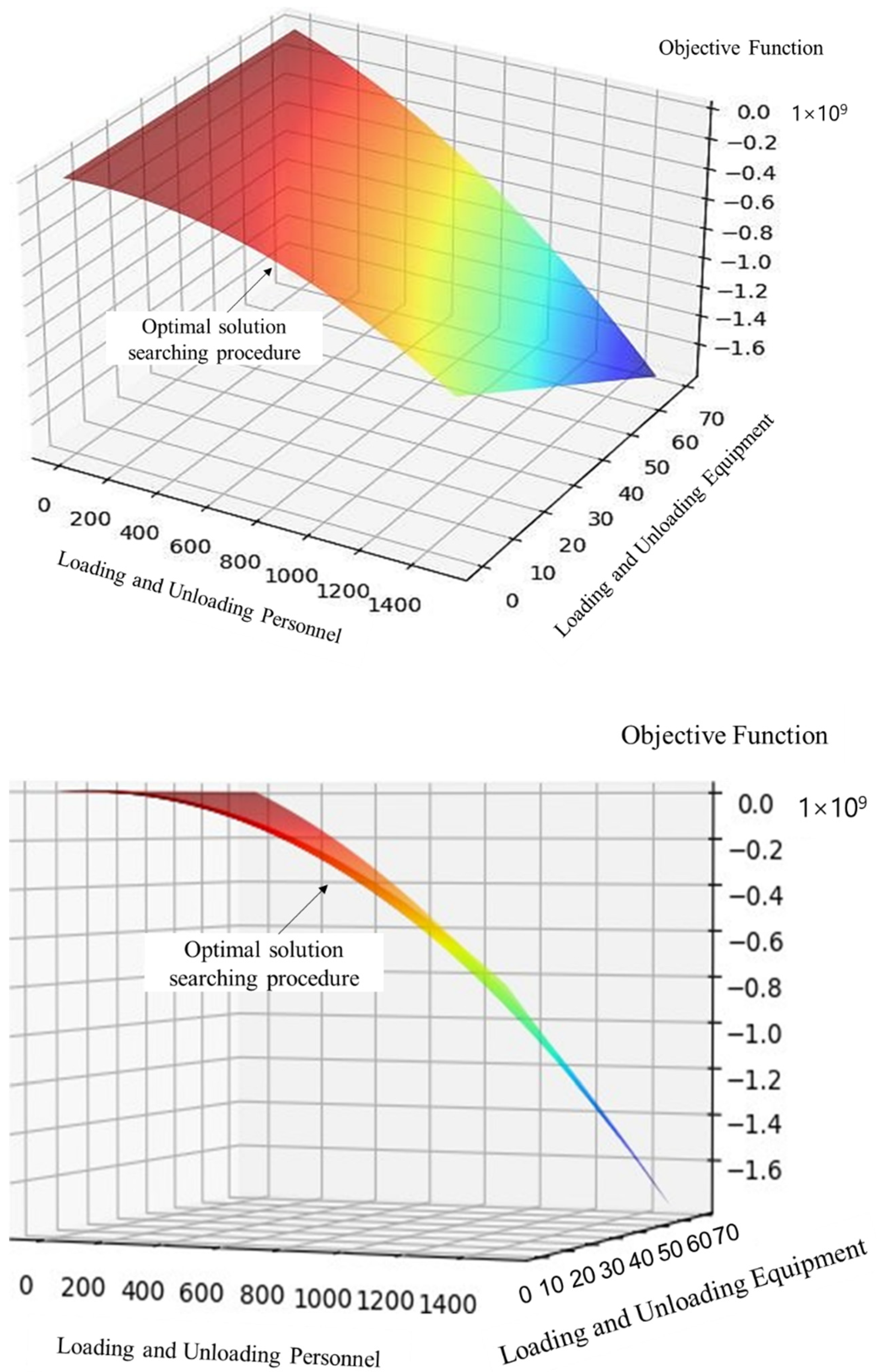
5.1.2. Gradient Descent Method for Solving Transportation Plan
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Beuthe, M.; Jourquin, B.; Urbain, N. Estimating freight transport price elasticity in multi-mode studies: A review and additional results from a multi-modal network model. Transp. Rev. 2014, 34, 626–644. [Google Scholar] [CrossRef]
- Crainic, T.G.; Rousseau, J.M. Multicommodity, multimode freight transportation: A general modeling and algorithmic framework for the service network design problem. Transp. Res. Part B Methodol. 1986, 20, 225–242. [Google Scholar] [CrossRef]
- Kalašová, A.; Kapusta, J.; Toman, P. A model of transatlantic intermodal freight transportation between the European continent and the United States. NAŠE MORE Znan. Časopis More Pomor. 2016, 63, 5–15. [Google Scholar] [CrossRef]
- Kazemi, Y.; Szmerekovsk, J. Modeling downstream petroleum supply chain: The importance of multi-mode transportation to strategic planning. Transp. Res. Part E Logist. Transp. Rev. 2015, 83, 111–125. [Google Scholar] [CrossRef]
- Shen, Q.; Chen, H.; Chu, F.; Zhou, M. Multi-mode transportation planning of crude oil via Greedy Randomized Adaptive Search and Path Relinking. Trans. Inst. Meas. Control. 2011, 33, 456–475. [Google Scholar] [CrossRef]
- Liu, E.; Wang, J. Bi-objective Optimization of Emergency Dispatching and Routing for Multi-mode Network Using Ant Colony Algorithm. In Proceedings of the 2020 IEEE 5th International Conference on Intelligent Transportation Engineering (ICITE), Beijing, China, 11–13 September 2020; IEEE: Piscataway, NJ, USA; pp. 513–517. [Google Scholar]
- Wang, C.; Lan, H.; Saldanha-da-Gama, F.; Chen, Y. On Optimizing a Multi-Mode Last-Mile Parcel Delivery System with Vans, Truck and Drone. Electronics 2021, 10, 2510. [Google Scholar] [CrossRef]
- Watanabe, T.; Shibata, M.; Suzuki, T. Evaluation of interregional transportation network considering multi-mode route alternatives. Asian Transp. Stud. 2016, 4, 210–227. [Google Scholar]
- Shunying, Z.; Yongfei, Y.; Hong, W.; Shangbin, L. An optimal transit path algorithm based on the terminal walking time judgment and multi-mode transit schedules. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11–12 May 2010; IEEE: Piscataway, NJ, USA, 2010; Volume 1, pp. 623–627. [Google Scholar]
- Zhang, J.; Guo, Y. Research on an optimal allocation mode of multi-modal transport network. J. Railw. 2020, 4, 114–116. [Google Scholar]
- Wei, H.; Li, J.; Liu, N. An algorithm for solving the shortest path of multi-modal transport in time-varying network. China Manag. Sci. 2006, 4, 56–63. [Google Scholar]
- Yin, S.; Tiezhu, L. Research on the method of international multi-modal transport path selection. Transp. Syst. Eng. Inf. 2006, 2, 95–98. [Google Scholar]
- Fulu, W.; Pan, L.; Zhibin, L. Optimization method of dangerous goods transportation path based on value at risk. Traffic Inf. Saf. 2020, 38, 23–29. [Google Scholar]
- Longhai, Y.; Shi, A.; Kejun, M. Freight network allocation model based on nonlinear bilevel programming. Highw. Transp. Sci. Technol. 2007, 24, 109–112. [Google Scholar]
- Lozano, A.; Storchi, G. Shortest viable path algorithm in multi-modal networks. Transp. Res. Part A 2001, 35, 225–241. [Google Scholar]
- Huo, C.; Ruichun, H.; Changxi, M. Multi-objective optimization of vehicle routing problem for dangerous goods transportation. Chin. J. Saf. Sci. 2015, 25, 84–90. [Google Scholar]
- Zhang, M.; Wang, N. Research on path optimization of dangerous goods transportation vehicles for major accidents avoidance. Oper. Res. Manag. 2018, 8, 1–9. [Google Scholar]
- Li, S.; Liu, Y. Study on multi-objective path optimization of road transportation of dangerous goods. Logist. Dep. Technol. 2019, 42, 118–121. [Google Scholar]
- Qiong, C.; Jingrong, C.; Xia, W.; Ji, Z. Multi-objective optimization of path selection for dangerous goods transportation. Logist. Technol. 2020, 43, 59–62. [Google Scholar]
- Liu, Y.; Xu, S.; Cai, C. Research on logistics vehicle path optimization under partial combined transportation strategy. Oper. Res. Manag. 2018, 27, 10–19. [Google Scholar]
- Zhang, L. Research on the Design Model and Algorithm of Road Dangerous Goods Transportation Network; Lanzhou Jiaotong University: Lanzhou, China, 2013. [Google Scholar]
- Hartlage, R.B. Rough-Cut Capacity Planning in Multimodal Freight Transportation Networks; Dissertations & Theses-Gradworks; ProQuest Dissertations Publishing: Ann Arbor, MI, USA, 2012. [Google Scholar]
- Yang, Y.; Feng, X. Study on the calculation of transport capacity of integrated express freight service network. J. Transp. Eng. Inf. 2016, 14, 58–62. [Google Scholar]
- Boussedjra, M.; Bloch, C.; EI Moudni, A. An exact method to find the international shortest path (ISP). IEEE Int. Conf. Netw. Sens. Control. 2004, 2, 1075–1080. [Google Scholar]
- Garrido, R.A.; Bronfman, A.C. Equity and social acceptability in multiple hazardous materials routing through urban areas. Transp. Res. Part A Policy Pract. 2017, 102, 244–260. [Google Scholar] [CrossRef]
- Fan, T.; Chiang, W.C.; Russell, R. Modeling urban hazmat transportation with road closure consideration. Transp. Res. Part D Transp. Environ. 2015, 35, 104–115. [Google Scholar] [CrossRef]
- Waluś, K.J.; Polasik, J.; Mielniczuk, J.; Warguła, Ł. Experimental tests of vehicle body accelerations at selected road and rail crossings. MATEC Web Conf. 2019, 254, 04002-1–04002-7. [Google Scholar] [CrossRef]
- Polasik, J.; Waluś, K.J. Analysis of the force during overcoming the roadblock—The preliminary experimental test. Transp. Probl. 2016, 11, 113–120. [Google Scholar] [CrossRef] [Green Version]
- Klockiewicz, Z.; Ślaski, G.; Spadło, M. Simulation Study of the Method of Random Kinematic Road Excitation’s Reconstruction Based on Suspension Dynamic Responses with Signal Disruptions. Vib. Phys. Syst. 2019, 30, 2019. [Google Scholar]
- Jun Zhu, J.; Khajepour, A.; Spike, J.; Chen, S.-K.; Moshchuk, N. An integrated vehicle velocity and tire—Road friction estimation based on a half-car model. Int. J. Veh. Auton. Syst. 2016, 13, 114–139. [Google Scholar] [CrossRef]
- Dižo, J.; Blatnický, M.; Sága, M.; Harušinec, J.; Gerlici, J.; Legutko, S. Development of a New System for Attaching the Wheels of the Front Axle in the Cross-Country Vehicle. Symmetry 2020, 12, 1156. [Google Scholar] [CrossRef]
- Evtukov, S.; Golov, E. Adhesion of car tires to the road surface during reconstruction of road accidents. E3S Web Conf. 2020, 164, 03022. [Google Scholar] [CrossRef]
- Liu, X.; Cao, Q.; Wang, H.; Chen, J.; Huang, X. Evaluation of Vehicle Braking Performance on Wet Pavement Surface using an Integrated Tire-Vehicle Modeling Approach, Journal of Transportation Research Record. Transp. Res. Board 2019, 2673, 295–307. [Google Scholar] [CrossRef]
- Baumann, R. Measuring Vehicle Dynamice with a Gyro Based System, Vehicle Dynamics & Simulation; Society of Automotive Engineers, Inc.: Warrendale, PA, USA, 2003; pp. 9–15. [Google Scholar]
- Sharifzadeh, M.; Timpone, F.; Farnam, A.; Senatore, A.; Akbari, A. Tire-Road Adherence Conditions Estimation for Intelligent Vehicle Safety Applications. In Advances in Italian Mechanism Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Kulikowski, K.; Szpica, D. Determination of directional stiffnesses of vehicles ’tires under a static load operation. Maint. Reliab. 2014, 16, 66–72. [Google Scholar]
- Dabrowski, K.; Ślaski, G. Method and algorithm of automatic estimation of road surface type for variable damping control. IOP Conf. Ser. Mater. Sci. Eng. 2016, 148, 2016. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Yau, K.K.; Zhang, X.; Li, Y. Traffic accidents involving fatigue driving and their extent of casualties. Accid. Anal. Prev. 2016, 87, 34–42. [Google Scholar] [CrossRef]
- Rosyidi, L.; Pradityo, H.P.; Gunawan, D.; Sari, R.F. Timebase dynamic weight for Dijkstra Algorithm implementation in route planning software. In Proceedings of the 2014 International Conference on Intelligent Green Building and Smart Grid (IGBSG), Taipei, Taiwan, 23–25 April 2014; IEEE: Piscataway, NJ, USA; pp. 1–4. [Google Scholar]
- Chao, Y. A developed Dijkstra algorithm and simulation of urban path search. In Proceedings of the 2010 5th International Conference on Computer Science & Education, Hefei, China, 24–27 August 2010; IEEE: Piscataway, NJ, USA; pp. 1164–1167. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basic Item | Basic Parameter |
|---|---|
| Total amount of single freight | 10 t |
| Unit container capacity | 1 t |
| Cost of special container | 1 million/a |
| Transportation/loading and unloading personnel wages | 1000 yuan/day |
| Highway and seaway replacement equipment | 50,000/set |
| Highway and railway replacement equipment | 40,000/set |
| Highway loading/unloading equipment | 20,000/set |
| The speed of large container ships on the sea | 36~52 km/h |
| The speed of freight cars on the highway | 60~100 km/h |
| The speed of freight trains | 70~100 km/h |
| Unit cost of highway transportation | 0.6 t/km |
| Unit cost of seaway transportation | 0.08 t/km |
| Unit cost of railway transportation | 0.15 t/km |
| Highway transportation mileage 1 | 415 km |
| Highway transportation mileage 2 | 845 km |
| seaway transportation mileage | 2263 km |
| Railway transportation mileage | 1491 km |
| Result Item | Gradient Descent | Fuzzy Eclectic Planning | Improvement | |
|---|---|---|---|---|
| time | 70 day | 76 day | 7.89% | |
| Personnel | Loading and unloading personnel | 1280 people | 1548 people | 17.31% |
| Transportation personnel | 120 people | 134 people | 10.45% | |
| Cost | 7.702 million | 8.912 million | 13.58% | |
| Loading and unloading equipment | 70 sets | 76 sets | 7.89% | |
| Result Item | Specific Item | Specific Data | |
|---|---|---|---|
| time | Daya Bay nuclear power plant (starting point loading) | 1 day | |
| Daya Bay nuclear power plant—Baofeng Wharf of Yangjiang (road transportation) | 6 day | ||
| Baofeng Wharf of Yangjiang (conversion between highway and seaway transportation) | 1 day | ||
| Baofeng Wharf of Yangjiang—No.8 wharf of Qingdao port (seaway transportation) | 25 day | ||
| No.8 wharf of Qingdao port (conversion between highway and seaway transportation) | 1 day | ||
| No.8 wharf of Qingdao port—Taiyuan station (highway transportation) | 19 day | ||
| Taiyuan station (conversion between highway and railway transportation) | 1 day | ||
| Taiyuan station—Jiuquan station (railway transportation) | 15 day | ||
| Jiuquan station (terminal unloading) | 1 day | ||
| personnel | Loading and unloading personnel | Daya Bay nuclear power plant (starting point loading) | 256 people |
| Baofeng Wharf of Yangjiang (conversion between highway and seaway transportation) | 256 people | ||
| No.8 wharf of Qingdao port (conversion between highway and seaway transportation) | 256 people | ||
| Taiyuan station (conversion between highway and railway transportation) | 256 people | ||
| Jiuquan station (terminal unloading) | 256 people | ||
| Transportation personnel | Daya Bay nuclear power plant—Baofeng Wharf of Yangjiang (road transportation) | 10 people | |
| Baofeng Wharf of Yangjiang—No.8 wharf of Qingdao port (seaway transportation) | 50 people | ||
| No.8 wharf of Qingdao port—Taiyuan station (highway transportation) | 10 people | ||
| Taiyuan station—Jiuquan station (railway transportation) | 50people | ||
| cost | Personnel cost | 3.53 million | |
| Container cost | 2 million | ||
| Equipment cost | 2.16 million | ||
| Transportation cost | 12,000 | ||
| Transportation tool | Truck | 10 vehicles | |
| Vessel | 1 ship | ||
| Train | 10 sections | ||
| Loading and unloading equipment | Daya Bay nuclear power plant (starting point loading) | 12 sets | |
| Baofeng Wharf of Yangjiang (conversion between highway and seaway transportation) | 12 sets | ||
| No.8 wharf of Qingdao port (conversion between highway and seaway transportation) | 12 sets | ||
| Taiyuan station (conversion between highway and railway transportation) | 12 sets | ||
| Jiuquan station (terminal unloading) | 12 sets | ||
| Time | Transportation Matters | Loading and Unloading Equipment | Loading and Unloading Personnel | Transportation Personnel | Transportation Tool |
|---|---|---|---|---|---|
| 1.2–1.3 | Daya Bay nuclear power plant (starting point loading) | 12 sets | 256 people | ||
| 1.3–1.9 | Daya Bay nuclear power plant—Baofeng Wharf of Yangjiang (road transportation) | 10 people | 5 vehicles | ||
| 1.9–1.10 | Baofeng Wharf of Yangjiang (conversion between highway and seaway transportation) | 12 sets | 256 people | ||
| 1.10–2.5 | Baofeng Wharf of Yangjiang—No.8 wharf of Qingdao port (seaway transportation) | 50 people | 1 ship | ||
| 2.5–2.6 | No.8 wharf of Qingdao port (conversion between highway and seaway transportation) | 12 sets | 256 people | ||
| 2.6–2.25 | No.8 wharf of Qingdao port—Taiyuan station (highway transportation) | 10 people | 5 vehicles | ||
| 2.25–2.26 | Taiyuan station (conversion between highway and railway transportation) | 12 sets | 256 people | ||
| 2.26–3.13 | Taiyuan station—Jiuquan station (railway transportation) | 50 people | 10 sections | ||
| 3.13–3.14 | Jiuquan station (terminal unloading) | 12 sets | 256 people |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Wang, S. Optimization of Joint Decision of Transport Mode and Path in Multi-Mode Freight Transportation Network. Sensors 2022, 22, 4887. https://doi.org/10.3390/s22134887
Lu Y, Wang S. Optimization of Joint Decision of Transport Mode and Path in Multi-Mode Freight Transportation Network. Sensors. 2022; 22(13):4887. https://doi.org/10.3390/s22134887
Chicago/Turabian StyleLu, Yang, and Shuaiqi Wang. 2022. "Optimization of Joint Decision of Transport Mode and Path in Multi-Mode Freight Transportation Network" Sensors 22, no. 13: 4887. https://doi.org/10.3390/s22134887
APA StyleLu, Y., & Wang, S. (2022). Optimization of Joint Decision of Transport Mode and Path in Multi-Mode Freight Transportation Network. Sensors, 22(13), 4887. https://doi.org/10.3390/s22134887