
Integrated Navigation Algorithm Based on Multiple Fading Factors Kalman Filter


Abstract
:1. Introduction
2. Integrated INS/GNSS Navigation System
2.1. Mathematical Error Model of INS/GNSS Integrated Navigation System
2.2. KF Algorithm
3. The Proposed Method with Both Adaptivity and Robustness
3.1. Basic Theories of Fading Filtering
3.2. Multiple Fading Factors Kalman Filter
3.3. An Improved Model Anomaly Judgment Basis
4. Experiments and Discussion
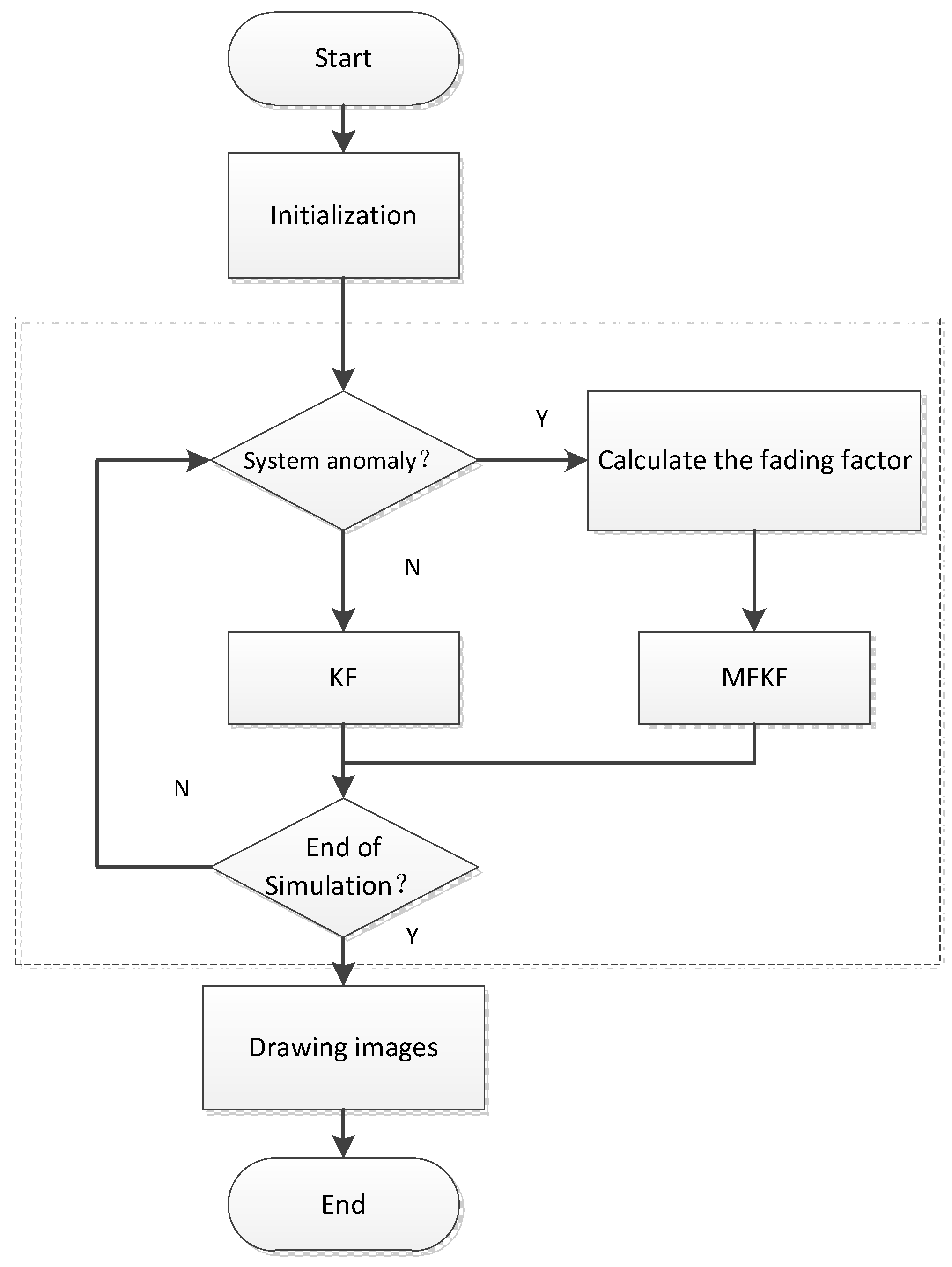
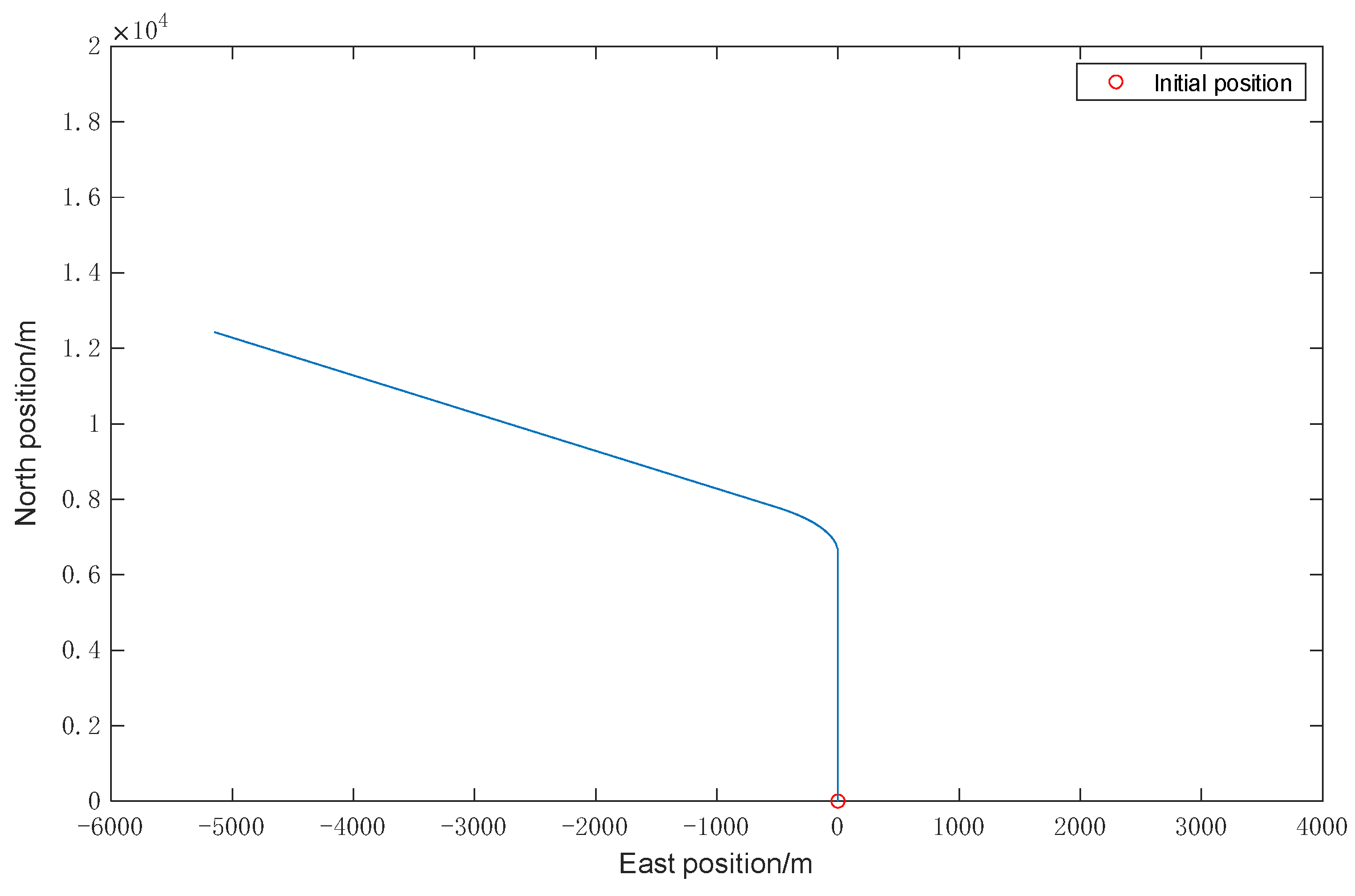
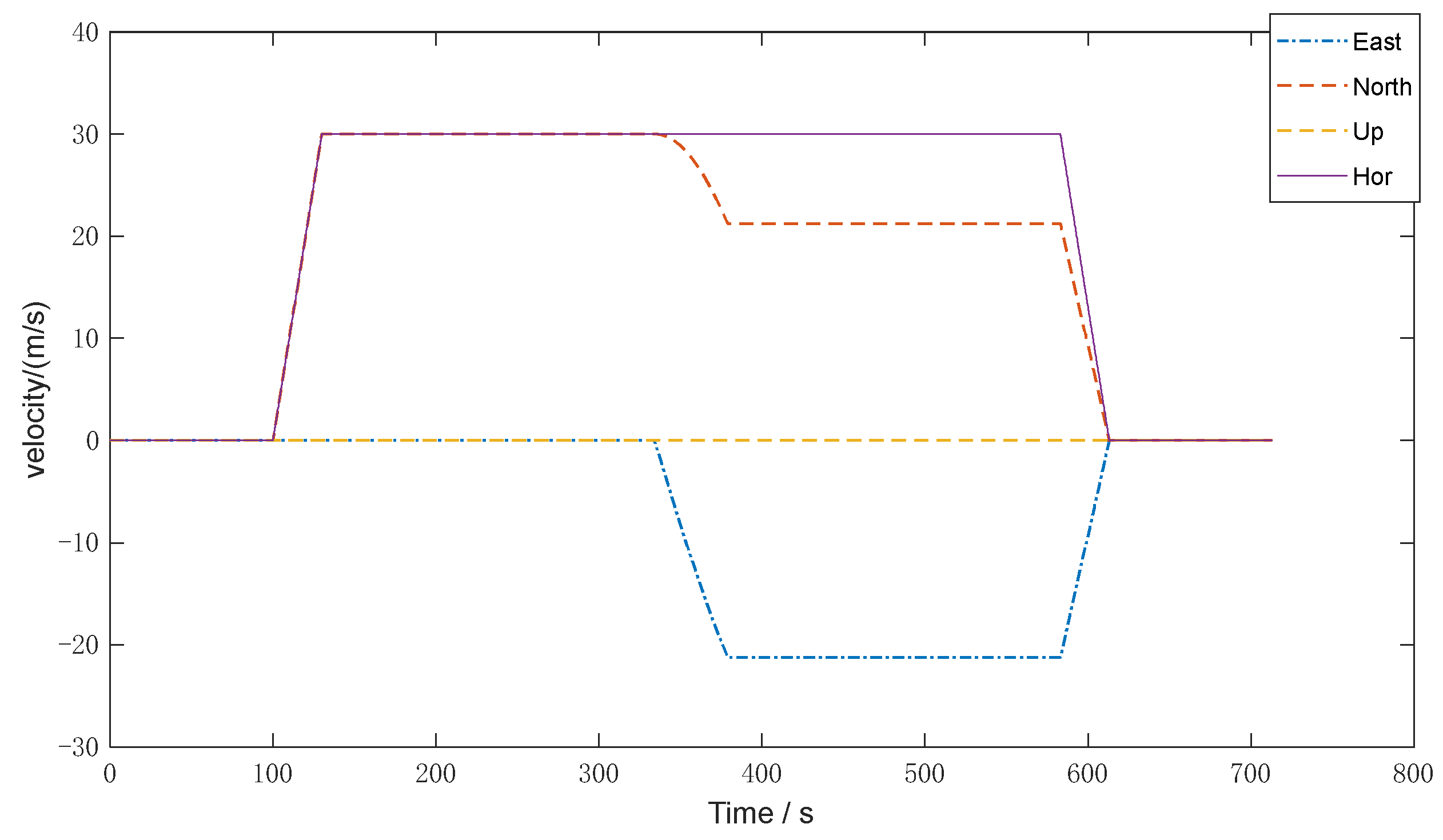
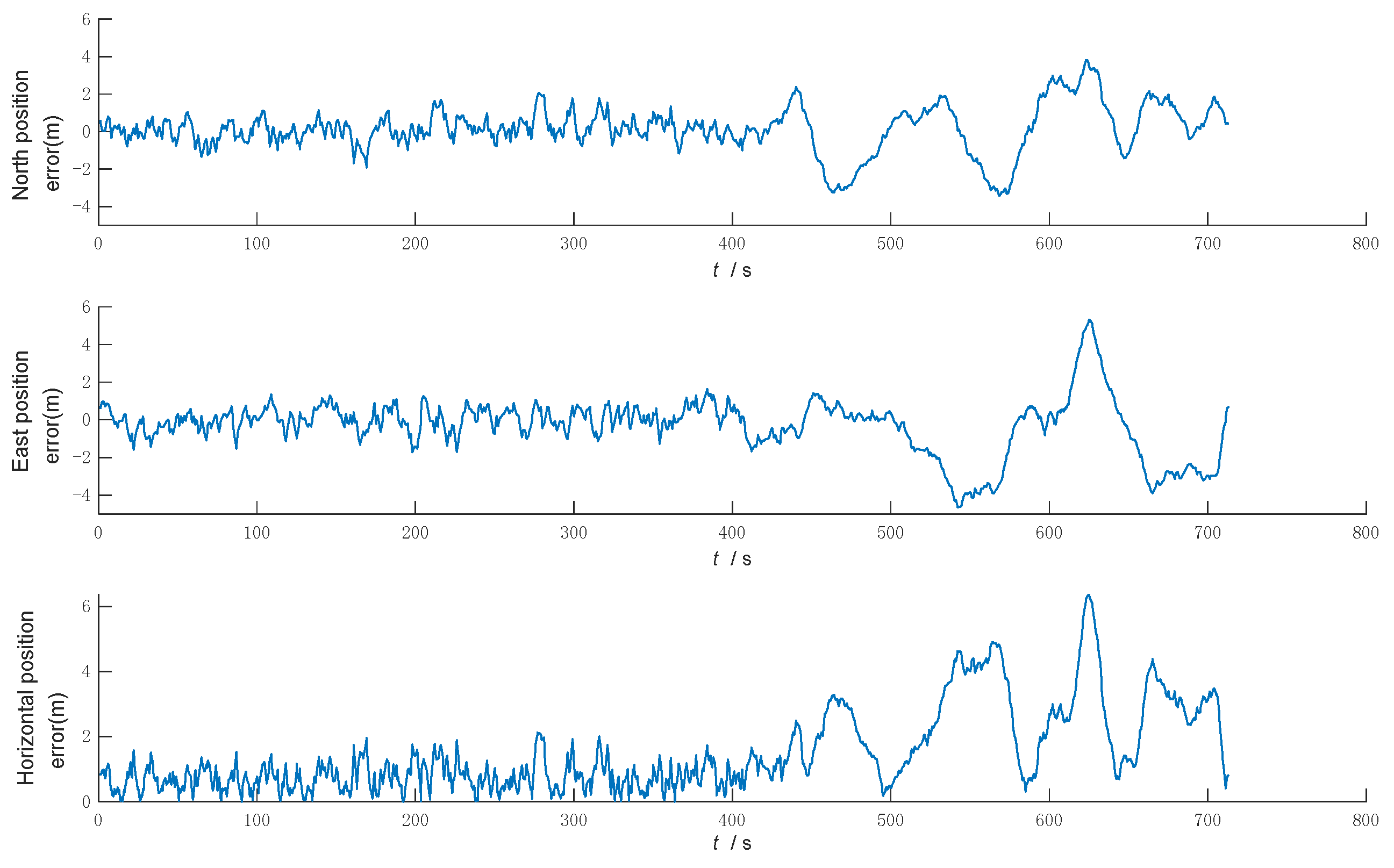
4.1. Simulation Experiments
4.2. Actual Data Verification
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jin, X.B.; Robertjeremiah, R.; Su, T.L.; Bai, J.L.; Kong, J.L. The New Trend of State Estimation: From Model-Driven to Hybrid-Driven Methods. Sensors 2021, 21, 2085. [Google Scholar] [CrossRef] [PubMed]
- Niu, Q.J.; Zhang, C.; Su, D.H. Research on SINS/GPS Integrated Navigation Kalman Filter Algorithm. Ordnance Ind. Autom. 2015, 34, 38–41. [Google Scholar]
- Gu, M.X.; Liu, W.; Hu, Y.; Xie, Z.; Zhao, J.X.; Wang, S.Z. A Loosely Coupled GNSS/SINS Integrated Navigation System Assisted by Gyroscope and Vialog. Aerosp. Control 2021, 39, 8–14. [Google Scholar]
- Wang, F.F.; Su, T.L.; Jin, X.B.; Zheng, Y.Y.; Kong, J.L.; Bai, Y.T. Indoor Tracking by RFID Fusion with IMU Data. Asian J. Control 2018, 21, 1768–1777. [Google Scholar] [CrossRef]
- Shirehjini, A.A.N.; Shirmohammadi, S. Improving Accuracy and Robustness in HF-RFID-Based Indoor Positioning with Kalman Filtering and Tukey Smoothing. IEEE Trans. Instrum. Meas. 2020, 69, 9190–9202. [Google Scholar] [CrossRef]
- Xu, D.J.; He, R.; SHEN, F.; Gai, M. Adaptive fading Kalman filter based on innovation covariance. Syst. Eng. Electron. 2011, 33, 2696–2699. [Google Scholar]
- Al-Shabi, M.; Gadsden, S.A.; Habibi, S.R. Kalman filtering strategies utilizing the chattering effects of the smooth variable structure filter. Signal Process. 2013, 93, 420–431. [Google Scholar] [CrossRef]
- Awin, O.A. Application of Extended Kalman Filter Algorithm in SDINS/GPS Integrated Inertial Navigation System. Appl. Mech. Mater. 2013, 367, 528–535. [Google Scholar] [CrossRef]
- Gu, P.; Jing, Z.; Wu, L. Adaptive fading factor unscented Kalman filter with application to target tracking. Aerosp. Syst. 2020, 4, 1–6. [Google Scholar]
- Chang, Y.; Wang, Y.; Shen, Y.; Ji, C. A new fuzzy strong tracking cubature Kalman filter for INS/GNSS. GPS Solut. 2021, 25, 1–15. [Google Scholar] [CrossRef]
- Jin, X.B.; Zhang, J.S.; Kong, J.L. A Reversible Automatic Selection Normalization (RASN) Deep Network for Predicting in the Smart Agriculture System. Agronomy 2022, 12, 591. [Google Scholar] [CrossRef]
- Kong, J.L.; Wang, H.X.; Wang, X.Y. Multi-stream hybrid architecture based on cross-level fusion strategy for fine-grained crop species recognition in precision agriculture. Comput. Electron. Agric. 2021, 185, 106134. [Google Scholar] [CrossRef]
- Zhao, S.; Shmaliy, Y.S.; Ahn, C.K.; Zhao, C.H. Probabilistic Monitoring of Correlated Sensors for Nonlinear Processes in State-Space. IEEE Trans. Ind. Electron. 2019, 67, 2294–2303. [Google Scholar] [CrossRef]
- Sarkka, S.; Nummenmaa, A. Recursive Noise Adaptive Kalman Filtering by Variational Bayesian Approximations. IEEE Trans. Autom. Control 2009, 54, 596–600. [Google Scholar] [CrossRef]
- Niu, Z.Z.; Li, S.L.; Wang, Q.Q.; Ren, H.F. Improved Sage-Husa Filter for Precision Airdrop Integrated Navigation System. Sci. Technol. Eng. 2012, 12, 6395–6400. [Google Scholar]
- Su, X.; Wan, Y.H.; Xie, B. Adaptive Estimation Kalman Filtering with Fading Factor for Attitude Determination in Integrated Navigation System. J. Syst. Simul. 2012, 24, 1669–1673. [Google Scholar]
- Liu, Y.; Fan, X.; Chen, L.; Jian, W.; Liang, L.; Ding, D. An innovative information fusion method with adaptive Kalman filter for integrated INS/GNSS navigation of autonomous vehicles. Mech. Syst. Signal Process. 2017, 100, 605–616. [Google Scholar] [CrossRef] [Green Version]
- Chang, G. Kalman filter with both adaptivity and robustness. J. Process Control 2014, 24, 81–87. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, S.B.; Zhang, Q.Z. Adaptive Estimation of Multiple Fading Factors for GPS/INS Integrated Navigation Systems. Sensors 2017, 17, 1254. [Google Scholar] [CrossRef] [Green Version]
- Zha, F.; Guo, S.; Li, F. An improved nonlinear Filter based on adaptive fading factor Applied in alignment of SINS. Optik 2019, 184, 165–176. [Google Scholar] [CrossRef]
- Ma, L.; Li, X.M. Improved Algorithmof Adaptive Fading Kalman Filtering Based on GPS/INS Integrated Navigation. Sci. Technol. Eng. 2013, 13, 9973–9977. [Google Scholar]
- Yang, Y.X.; Gao, W.G. Comparison of two fading filters and adaptively robust filter. Geomat. Inf. Sci. Wuhan Univ. 2007, 10, 200–203. [Google Scholar] [CrossRef]
- Xue, H.J.; Guo, X.S.; Zhou, S.F. SINS initial alignment method based on adaptive multiple fading factors Kalman filter. Syst. Eng. Electron. 2017, 39, 620–626. [Google Scholar]
- Pan, C.; Gao, J.X.; Li, Z.K.; Qian, N.J.; Li, F.C. Multiple fading factors-based strong tracking variational Bayesian adaptive Kalman filter. Measurement 2021, 176, 109139. [Google Scholar] [CrossRef]
- Gao, W.X.; Miao, L.J.; Ni, M.L. Multiple Fading Factors Kalman Filter for SINS Static Alignment Application. Chin. J. Aeronaut. 2011, 24, 476–483. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Li, J.C.; Ben, Y.Y.; Yang, X.L. Adaptive Kalman filter based on multiple fading factors. Syst. Eng. Electron. 2014, 36, 1405–1409. [Google Scholar]
- Wang, J.; Chen, X.; Yang, P. Adaptive H-infinite kalman filter based on multiple fading factors and its application in unmanned underwater vehicle. ISA Trans. 2021, 108, 295–304. [Google Scholar] [CrossRef]
- Guo, S.L.; Wu, M.; Xu, J.N.; Li, J.S. Adaptive Fading Kalman Filter and Its Application in SINS Initial Alignment. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 1667–1672. [Google Scholar]
- Chen, Q.; Xie, S.; He, X. Neural-Network-Based Adaptive Singularity-Free Fixed-Time Attitude Tracking Control for Spacecrafts. IEEE Trans. Cybern. 2020, 51, 5032–5045. [Google Scholar] [CrossRef]
- Wang, S.; Na, J. Parameter Estimation and Adaptive Control for Servo Mechanisms with Friction Compensation. IEEE Trans. Ind. Inform. 2020, 16, 6816–6825. [Google Scholar] [CrossRef]
- Gao, X.; Sun, B.; Hu, X.; Zhu, K. Echo State Network for Extended State Observer and Sliding Mode Control of Vehicle Drive Motor with Unknown Hysteresis Nonlinearity. Math. Probl. Eng. 2020, 2020, 2534038. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.B.; Gong, W.T.; Kong, J.L. A Planar Flow-Based Variational Auto-Encoder Prediction Model for Time Series Data. Mathematics 2022, 10, 610. [Google Scholar] [CrossRef]
- Yan, G.M.; Deng, Y. Review on Practical Kalman Filtering Techniques in Traditional Integrated Navigation System. Navig. Position. Timing 2020, 7, 50–64. [Google Scholar]
- Xue, W.T.; Zhang, B.; Li, S.J. Application of New Information Adaptive Kalman Filter in Integrated Navigation. GNSS World China 2014, 4, 8–11. [Google Scholar]
- Xu, G.Y.; Wang, Z.; Wang, Z.Q. GPS/INS position integrated navigation based on adaptive Kalman filter. Electron. Des. Eng. 2017, 25, 100–103. [Google Scholar]
- Jeong, J.; Cho, Y.; Shin, Y.S.; Roh, H.; Kim, A. Complex urban dataset with multi-level sensors from highly diverse urban environments. Int. J. Robot. Res. 2019, 38, 642–657. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMU Parameter | Value |
|---|---|
| INS out frequency | 100 Hz |
| Gyro bias | 1°/h |
| Gyro angle random walk | 5°/sqrt (h) |
| Accelerometer bias | 50 μg |
| Algorithm | Error Mean (m) | Error Standard Deviation (m) | ||||
|---|---|---|---|---|---|---|
| North | East | Horizontal | North | East | Horizontal | |
| KF | 1.02 | 0.89 | 1.50 | 1.14 | 0.86 | 1.28 |
| MFKF | 0.66 | 0.64 | 1.02 | 0.55 | 0.50 | 0.59 |
| AMFKF | 0.59 | 0.54 | 0.89 | 0.46 | 0.45 | 0.51 |
| MEMS Parameter | Value |
|---|---|
| INS out frequency | 100 Hz |
| Gyro bias | 10°/h |
| Gyro angle random walk | 5°/sqrt (h) |
| Accelerometer range | ±5 g |
| Accelerometer bias | 1 mg |
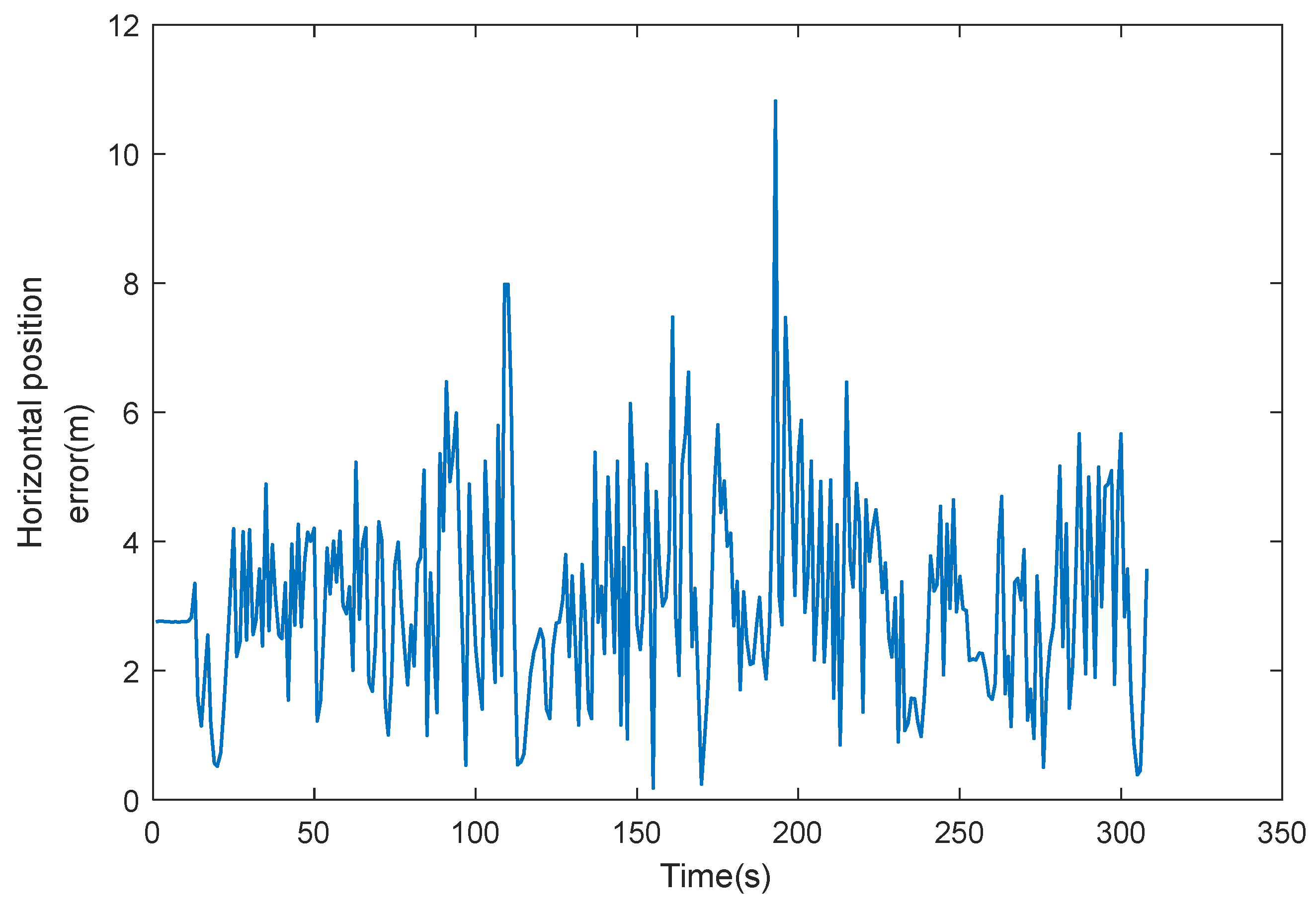
| Statistics | Position Error (m) | ||
|---|---|---|---|
| North | East | Horizontal | |
| Mean | 2.19 | 1.78 | 3.10 |
| Max | 10.68 | 5.39 | 10.82 |
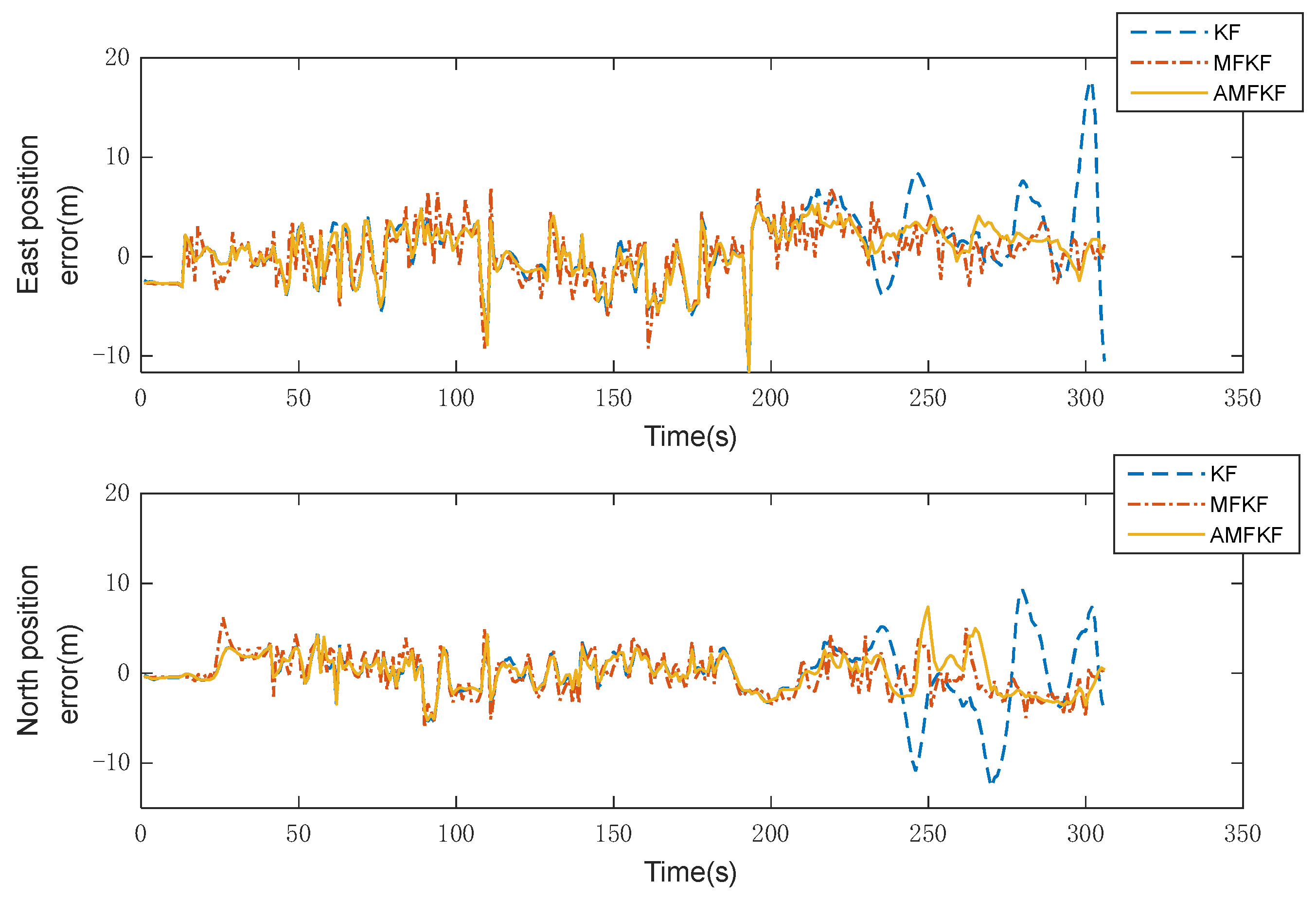
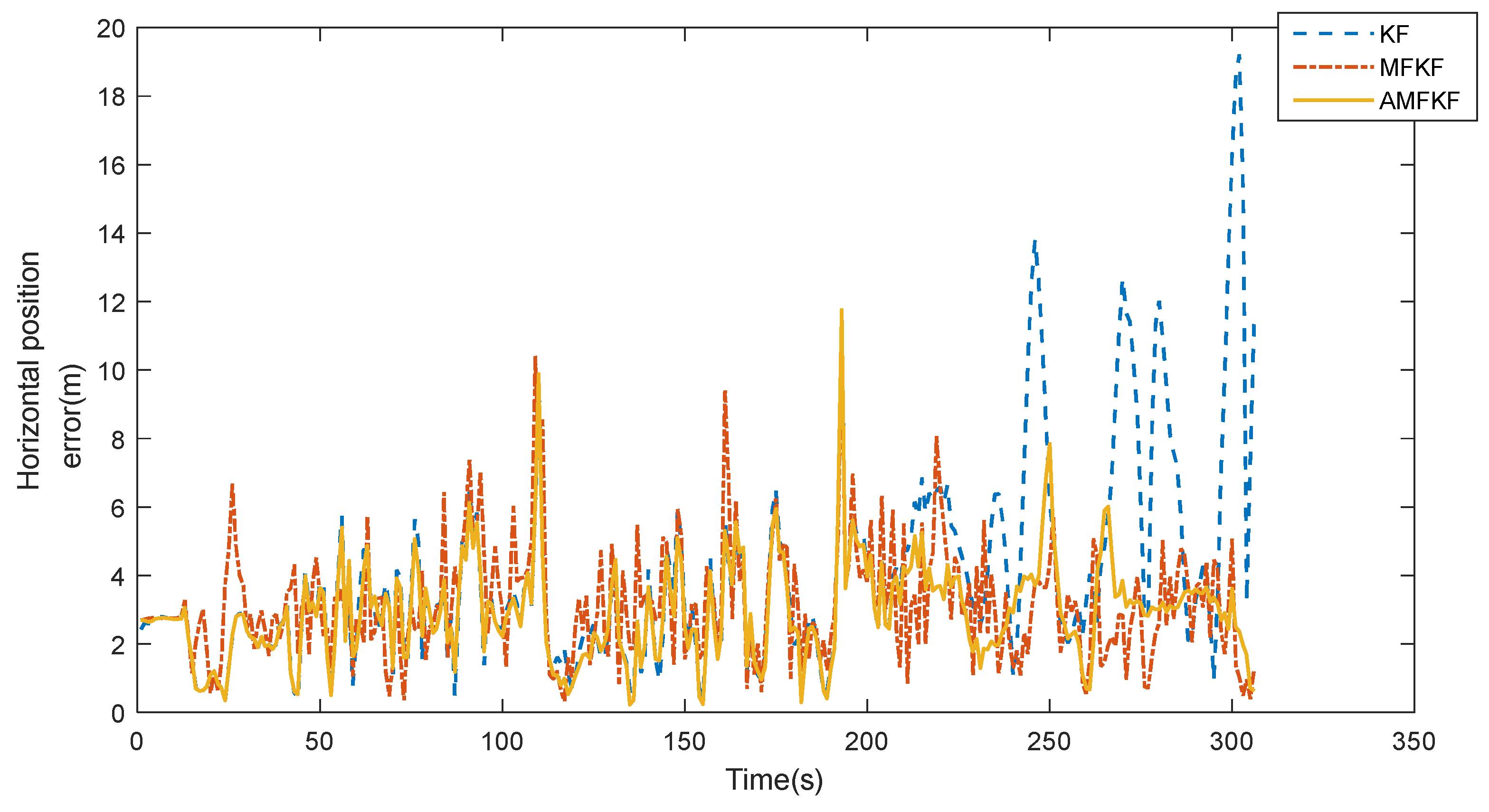
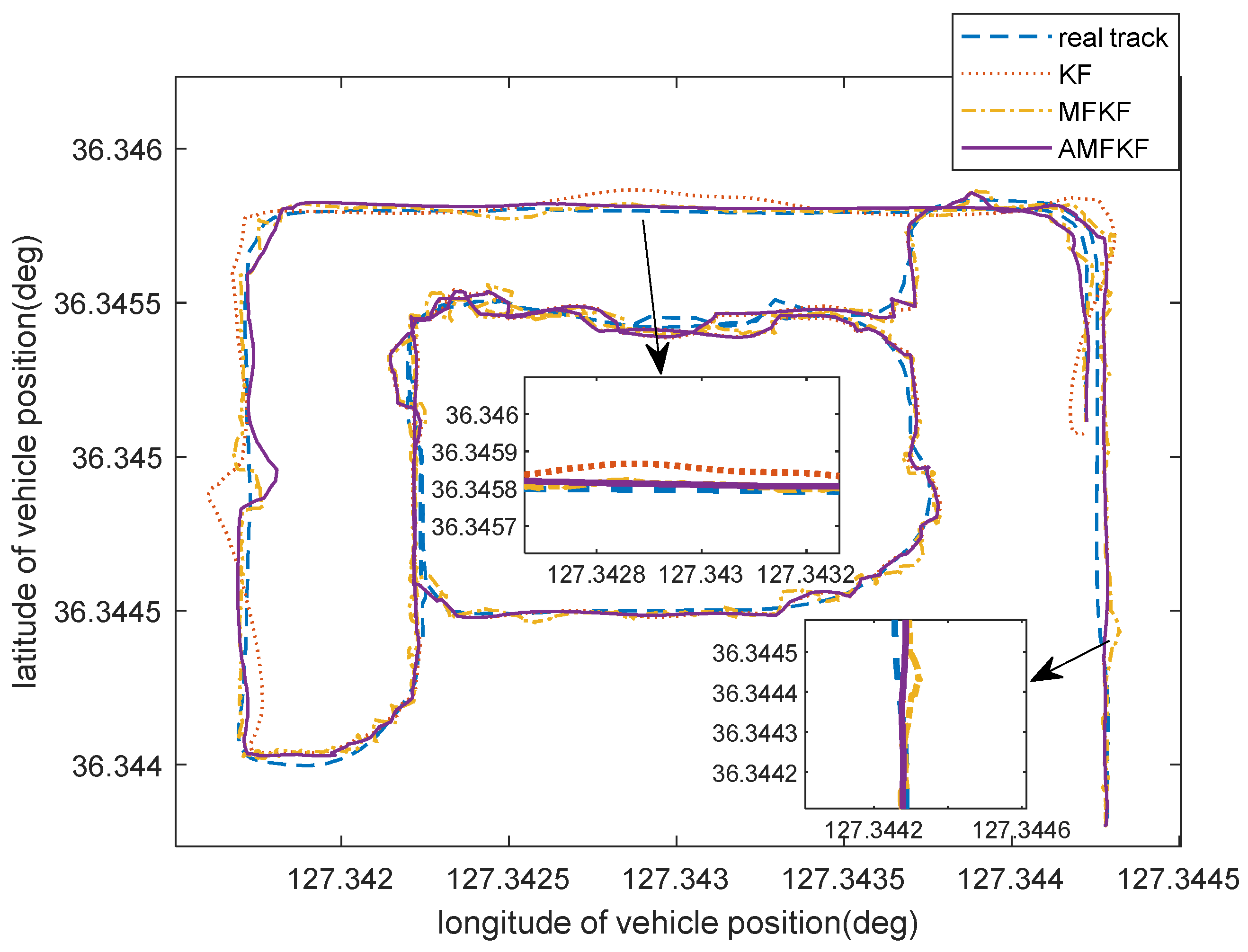
| Algorithm | Position Error (m) | Error Standard Deviation (m) | ||||
|---|---|---|---|---|---|---|
| North | East | Horizontal | North | East | Horizontal | |
| KF | 2.83 | 2.26 | 3.99 | 2.64 | 2.26 | 3.05 |
| MFKF | 2.22 | 1.84 | 3.17 | 1.75 | 1.25 | 1.69 |
| AMFKF | 2.15 | 1.58 | 2.93 | 1.50 | 1.19 | 1.49 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Zhang, Z.; Liu, S.; Yan, X.; Yang, C. Integrated Navigation Algorithm Based on Multiple Fading Factors Kalman Filter. Sensors 2022, 22, 5081. https://doi.org/10.3390/s22145081
Sun B, Zhang Z, Liu S, Yan X, Yang C. Integrated Navigation Algorithm Based on Multiple Fading Factors Kalman Filter. Sensors. 2022; 22(14):5081. https://doi.org/10.3390/s22145081
Chicago/Turabian StyleSun, Bo, Zhenwei Zhang, Shicai Liu, Xiaobing Yan, and Chengxu Yang. 2022. "Integrated Navigation Algorithm Based on Multiple Fading Factors Kalman Filter" Sensors 22, no. 14: 5081. https://doi.org/10.3390/s22145081
APA StyleSun, B., Zhang, Z., Liu, S., Yan, X., & Yang, C. (2022). Integrated Navigation Algorithm Based on Multiple Fading Factors Kalman Filter. Sensors, 22(14), 5081. https://doi.org/10.3390/s22145081