
Reconstructing Synergy-Based Hand Grasp Kinematics from Electroencephalographic Signals



Abstract
:1. Introduction
2. Materials and Methods
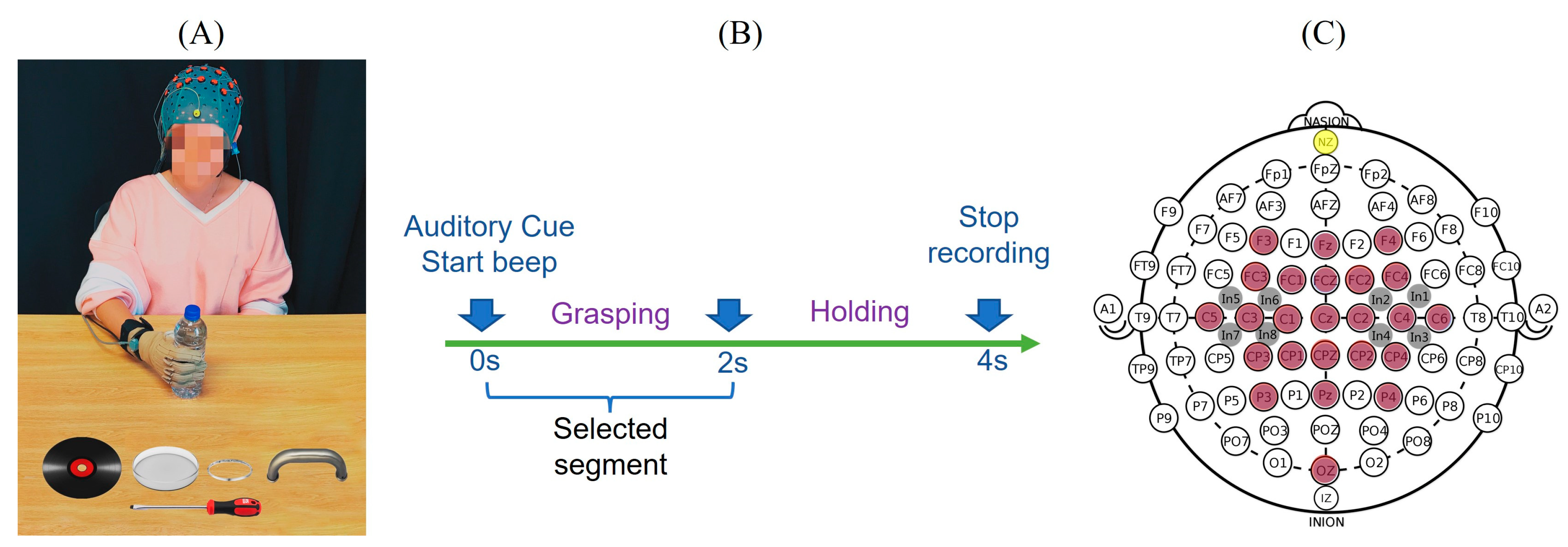
2.1. Experimental Protocol
2.2. Data Collection
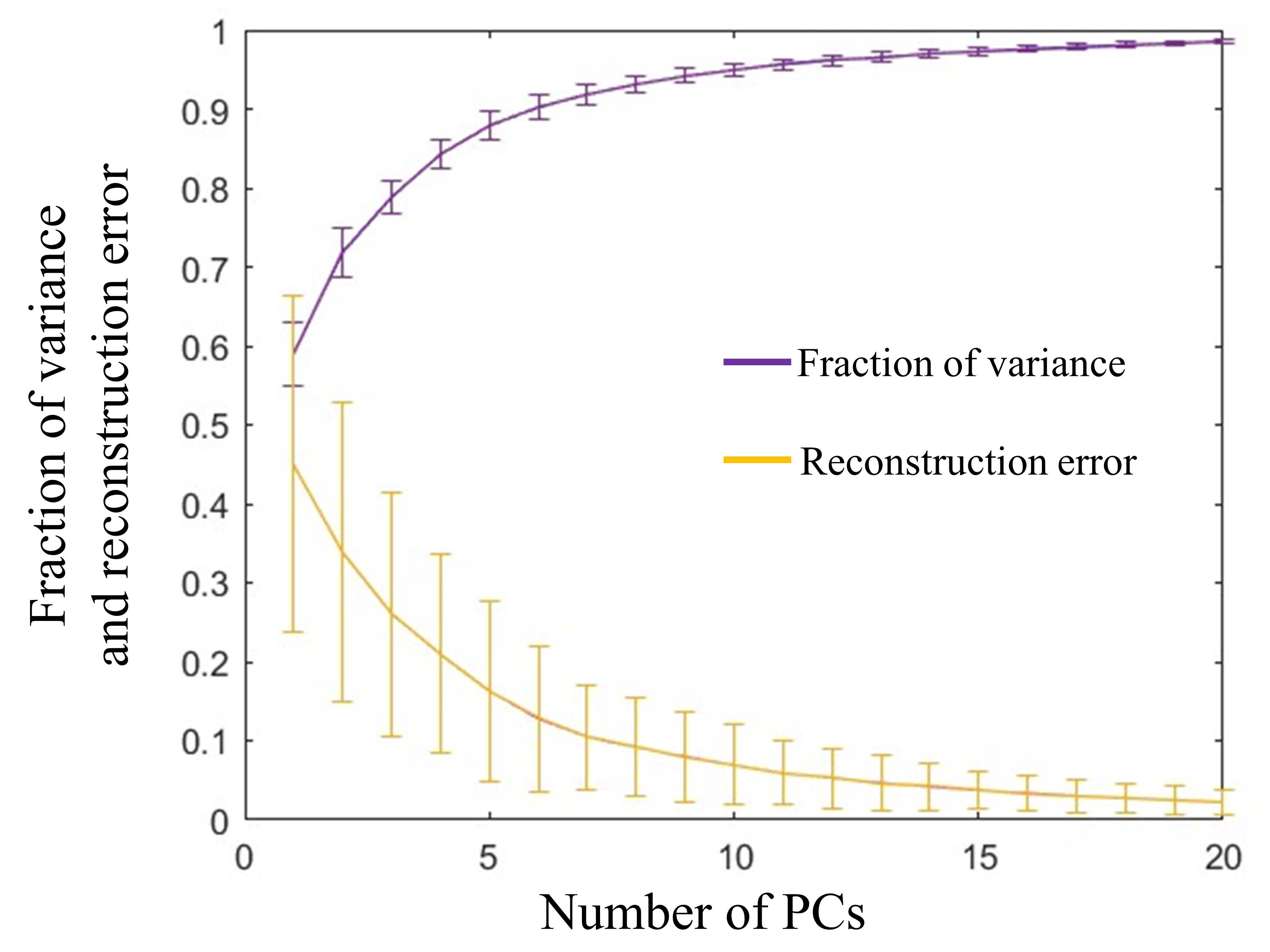
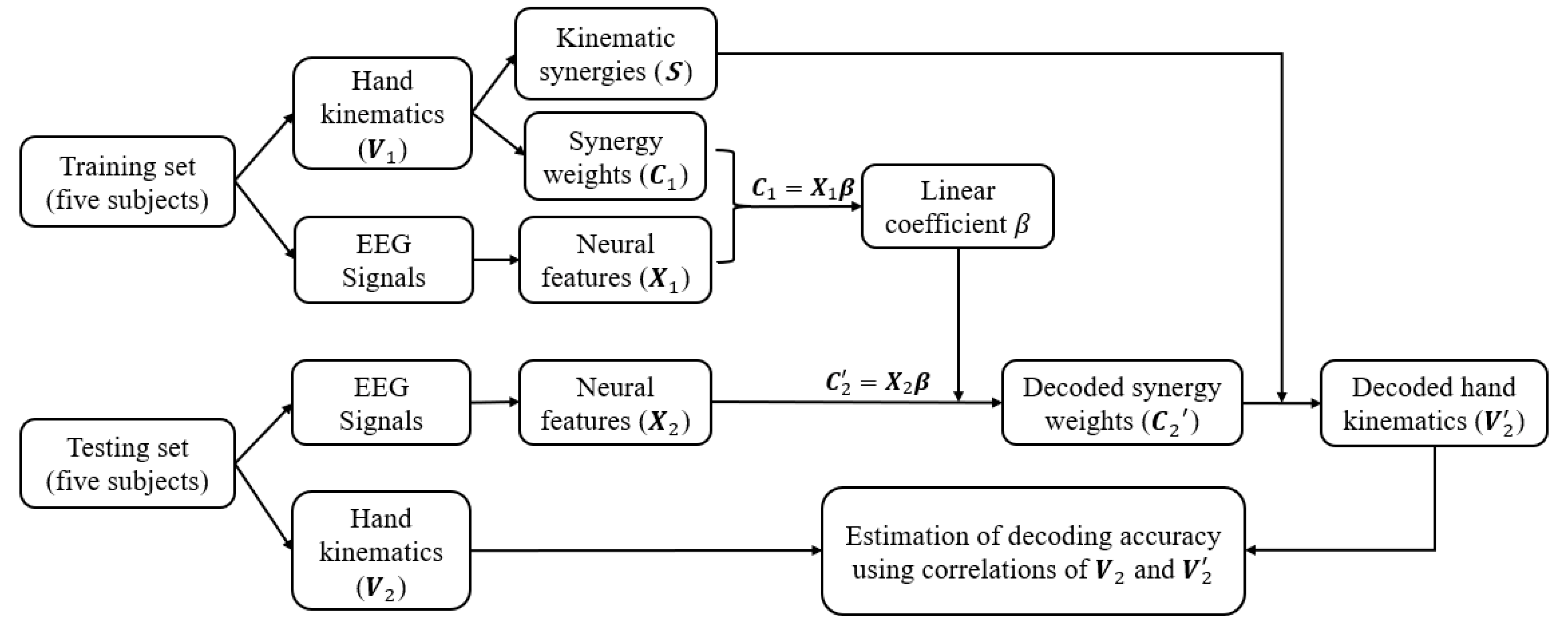
2.3. Derivation of Hand Kinematic Synergies
2.4. Extraction of Neural Features
2.5. Cortical Correlates of Kinematic Synergies
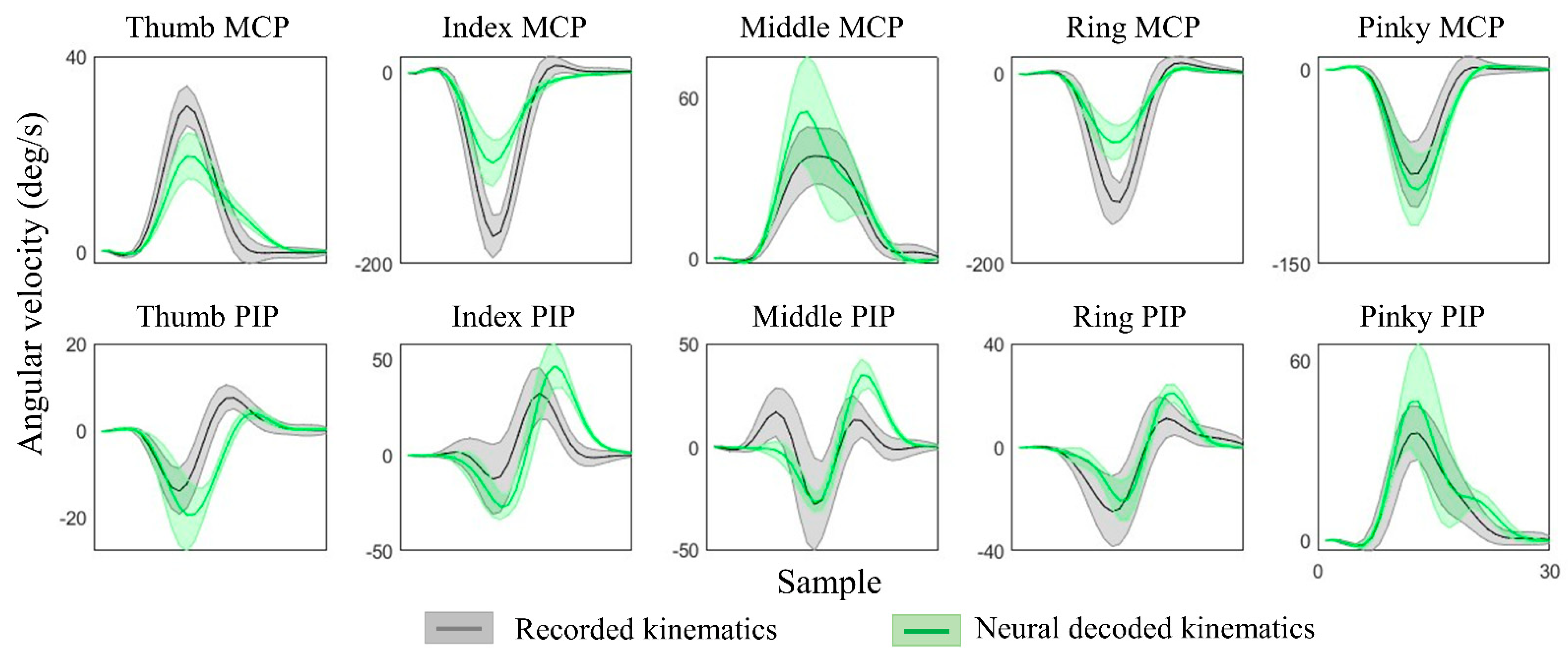
3. Results
4. Discussion
4.1. Movement Decoding from EEG
4.2. Neural Representations of Synergies
4.3. Relevance to Individuals with Stroke
4.4. Limitations and Future Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tsao, C.W.; Aday, A.W.; Almarzooq, Z.I.; Alonso, A.; Beaton, A.Z.; Bittencourt, M.S.; Boehme, A.K.; Buxton, A.E.; Carson, A.P.; Commodore-Mensah, Y.; et al. Heart Disease and Stroke Statistics-2022 Update: A Report From the American Heart Association. Circulation 2022, 145, e153–e639. [Google Scholar] [CrossRef]
- Burns, M.K.; Pei, D.; Vinjamuri, R. Myoelectric Control of a Soft Hand Exoskeleton Using Kinematic Synergies. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 1351–1361. [Google Scholar] [CrossRef]
- Santello, M.; Bianchi, M.; Gabiccini, M.; Ricciardi, E.; Salvietti, G.; Prattichizzo, D.; Ernst, M.; Moscatelli, A.; Jörntell, H.; Kappers, A.M.L.; et al. Hand Synergies: Integration of Robotics and Neuroscience for Understanding the Control of Biological and Artificial Hands. Phys. Life Rev. 2016, 17, 1–23. [Google Scholar] [CrossRef]
- Vinjamuri, R.; Weber, D.J.; Mao, Z.; Collinger, J.L.; Degenhart, A.D.; Kelly, J.W.; Boninger, M.L.; Tyler-kabara, E.C.; Wang, W. Toward Synergy-Based Brain-Machine Interfaces. IEEE Trans. Inf. Technol. Biomed. 2011, 15, 726–736. [Google Scholar] [CrossRef] [PubMed]
- Bernstein, N.; Bernstein, N.; Bernstein, N. The Co-Ordination and Regulation of Movements; Elsevier: Amsterdam, The Netherlands, 1967. [Google Scholar]
- Santello, M.; Baud-bovy, G.; Jörntell, H. Neural Bases of Hand Synergies. Front. Comput. Neurosci. 2013, 7, 23. [Google Scholar] [CrossRef] [PubMed]
- Tresch, M.C.; Saltiel, P.; Bizzi, E. The Construction of Movement by the Spinal Cord. Nat. Neurosci. 1999, 2, 162–167. [Google Scholar] [CrossRef] [PubMed]
- Gentner, R.; Classen, J. Modular Organization of Finger Movements by the Human Central Nervous System. Neuron 2006, 52, 731–742. [Google Scholar] [CrossRef]
- Pistohl, T.; Schulze-bonhage, A.; Aertsen, A.; Mehring, C.; Ball, T. Decoding Natural Grasp Types from Human ECoG. Neuroimage 2012, 59, 248–260. [Google Scholar] [CrossRef]
- Agashe, H.A.; Paek, A.Y.; Zhang, Y.; Contreras-Vidal, J.L. Global Cortical Activity Predicts Shape of Hand during Grasping. Front. Neurosci. 2015, 9, 121. [Google Scholar] [CrossRef]
- Leo, A.; Handjaras, G.; Bianchi, M.; Marino, H.; Gabiccini, M.; Guidi, A.; Scilingo, E.P.; Pietrini, P.; Bicchi, A.; Santello, M.; et al. A Synergy-Based Hand Control Is Encoded in Human Motor Cortical Areas. eLife 2016, 5, e13420. [Google Scholar] [CrossRef]
- Hirano, M.; Funase, K. Reorganization of Finger Covariation Patterns Represented in the Corticospinal System by Learning of a Novel Movement Irrelevant to Common Daily Movements. J. Neurophysiol. 2019, 122, 2458–2467. [Google Scholar] [CrossRef]
- Yoshimura, N.; Tsuda, H.; Kawase, T.; Kambara, H. Decoding Finger Movement in Humans Using Synergy of EEG Cortical Current Signals. Sci. Rep. 2017, 7, 11382. [Google Scholar] [CrossRef]
- Jarrassé, N.; Proietti, T.; Crocher, V.; Robertson, J.; Sahbani, A.; Morel, G.; Roby-Brami, A.; Ronsse, R.; Sahbani, A.; Morel, G. Robotic Exoskeletons: A Perspective for the Rehabilitation of Arm Coordination in Stroke Patients. Front. Hum. Neurosci 2014, 8, 947. [Google Scholar] [CrossRef]
- Roh, J.; Rymer, W.Z.; Perreault, E.J.; Yoo, S.B.; Beer, R.F. Alterations in Upper Limb Muscle Synergy Structure in Chronic Stroke Survivors. J. Neurophysiol. 2013, 109, 768–781. [Google Scholar] [CrossRef]
- Furui, A.; Eto, S.; Nakagaki, K.; Shimada, K.; Nakamura, G.; Masuda, A.; Chin, T.; Tsuji, T. A Myoelectric Prosthetic Hand with Muscle Synergy–Based Motion Determination and Impedance Model–Based Biomimetic Control. Sci. Robot. 2019, 4, eaaw6339. [Google Scholar] [CrossRef]
- Sanchez-Reyes, L.M.; Rodriguez-Resendiz, J.; Avecilla-Ramirez, G.N.; Garcia-Gomar, M.L.; Robles-Ocampo, J.B. Impact of EEG Parameters Detecting Dementia Diseases: A Systematic Review. IEEE Access 2021, 9, 78060–78074. [Google Scholar] [CrossRef]
- Schwarz, A.; Ofner, P.; Pereira, J.; Sburlea, A.I.; Müller-Putz, G.R. Decoding Natural Reach-and-Grasp Actions from Human EEG. J. Neural Eng. 2018, 15, 016005. [Google Scholar] [CrossRef]
- Muller-Putz, G.R.; Ofner, P.; Pereira, J.; Pinegger, A.; Schwarz, A.; Zube, M.; Eck, U.; Hessing, B.; Schneiders, M.; Rupp, R. Applying Intuitive EEG-Controlled Grasp Neuroprostheses in Individuals with Spinal Cord Injury: Preliminary Results from the MoreGrasp Clinical Feasibility Study. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 5949–5955. [Google Scholar] [CrossRef]
- Frolov, A.A.; Mokienko, O.; Lyukmanov, R.; Biryukova, E.; Kotov, S.; Turbina, L.; Nadareyshvily, G.; Bushkova, Y. Post-Stroke Rehabilitation Training with a Motor-Imagery-Based Brain-Computer Interface (BCI)-Controlled Hand Exoskeleton: A Randomized Controlled Multicenter Trial. Front. Neurosci. 2017, 11, 400. [Google Scholar] [CrossRef]
- Mane, R.; Chouhan, T.; Guan, C. BCI for Stroke Rehabilitation: Motor and Beyond. J. Neural Eng. 2020, 17, 041001. [Google Scholar] [CrossRef]
- Bartur, G.; Pratt, H.; Soroker, N. Changes in Mu and Beta Amplitude of the EEG during Upper Limb Movement Correlate with Motor Impairment and Structural Damage in Subacute Stroke. Clin. Neurophysiol. 2019, 130, 1644–1651. [Google Scholar] [CrossRef]
- Shiner, C.T.; Tang, H.; Johnson, B.W.; McNulty, P.A. Cortical Beta Oscillations and Motor Thresholds Differ across the Spectrum of Post-Stroke Motor Impairment, a Preliminary MEG and TMS Study. Brain Res. 2015, 1629, 26–37. [Google Scholar] [CrossRef]
- Giovanni, A.; Capone, F.; di Biase, L.; Ferreri, F.; Florio, L.; Guerra, A.; Marano, M.; Paolucci, M.; Ranieri, F.; Salomone, G.; et al. Oscillatory Activities in Neurological Disorders of Elderly: Biomarkers to Target for Neuromodulation. Front. Aging Neurosci. 2017, 9, 189. [Google Scholar] [CrossRef]
- Spüler, M.; López-Larraz, E.; Ramos-Murguialday, A. On the Design of EEG-Based Movement Decoders for Completely Paralyzed Stroke Patients. J. Neuroeng. Rehabil. 2018, 15, 110. [Google Scholar] [CrossRef]
- Agashe, H.A.; Paek, A.Y.; Contreras-Vidal, J.L. Multisession, Noninvasive Closed-Loop Neuroprosthetic Control of Grasping by Upper Limb Amputees, 1st ed.; Elsevier B.V.: Amsterdam, The Netherlands, 2016; Volume 228. [Google Scholar]
- Korik, A.; Sosnik, R.; Siddique, N.; Coyle, D. Decoding Imagined 3D Hand Movement Trajectories From EEG: Evidence to Support the Use of Mu, Beta, and Low Gamma Oscillations. Front. Neurosci. 2018, 12, 130. [Google Scholar] [CrossRef]
- Korik, A.; Sosnik, R.; Siddique, N.; Coyle, D. Imagined 3D Hand Movement Trajectory Decoding from Sensorimotor EEG Rhythms. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 4591–4596. [Google Scholar] [CrossRef]
- Kobler, R.J.; Almeida, I.; Sburlea, A.I.; Müller-Putz, G.R. Using Machine Learning to Reveal the Population Vector from EEG Signals. J. Neural Eng. 2020, 17, 026002. [Google Scholar] [CrossRef]
- Úbeda, A.; Hortal, E.; Iáñez, E.; Perez-Vidal, C.; Azorín, J.M. Assessing Movement Factors in Upper Limb Kinematics Decoding from EEG Signals. PLoS ONE 2015, 10, e0128456. [Google Scholar] [CrossRef]
- Mondini, V.; Kobler, R.J.; Sburlea, A.I.; Müller-Putz, G.R. Continuous Low-Frequency EEG Decoding of Arm Movement for Closed-Loop, Natural Control of a Robotic Arm. J. Neural Eng. 2020, 17, 046031. [Google Scholar] [CrossRef]
- Pei, D.; Patel, V.; Burns, M.; Chandramouli, R.; Vinjamuri, R. Neural Decoding of Synergy-Based Hand Movements Using Electroencephalography. IEEE Access 2019, 7, 18155–18163. [Google Scholar] [CrossRef]
- Patel, V.; Burns, M.; Pei, D.; Vinjamuri, R. Decoding Synergy-Based Hand Movements Using Electroencephalography. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 4816–4819. [Google Scholar]
- Schalk, G.; McFarland, D.J.; Hinterberger, T.; Birbaumer, N.; Wolpaw, J.R. BCI2000: A General-Purpose Brain-Computer Interface (BCI) System. IEEE Trans. Biomed. Eng. 2004, 51, 1034–1043. [Google Scholar] [CrossRef]
- Vinjamuri, R.; Mao, Z.; Sclabassi, R.J.; Diagnostics, C.; Sun, M. Time-Varying Synergies in Velocity Profiles of Finger Joints of the Hand during Reach and Grasp. In Proceedings of the The 29th Annual International Conference of the IEEE EMBS, Lyon, France, 22–26 August 2007; pp. 4846–4849. [Google Scholar]
- Torres-Oviedo, G.; Ting, L.H. Subject-Specific Muscle Synergies in Human Balance Control Are Consistent across Different Biomechanical Contexts. J. Neurophysiol. 2010, 103, 3084–3098. [Google Scholar] [CrossRef] [PubMed]
- D’Avella, A.; Bizzi, E. Shared and Specific Muscle Synergies in Natural Motor Behaviors. Proc. Natl. Acad. Sci. USA 2005, 102, 3076–3081. [Google Scholar] [CrossRef] [PubMed]
- Agashe, H.; Contreras-Vidal, J.L. Reconstructing Hand Kinematics During Reach to Grasp Movements from Electroencephalographic (EEG) Signals. In Proceedings of the 33rd Annual International Conference of the IEEE EMBS, Boston, MA, USA, 30 August–3 September 2011; pp. 5444–5447. [Google Scholar]
- Antelis, J.M.; Montesano, L.; Ramos-murguialday, A.; Birbaumer, N.; Minguez, J. On the Usage of Linear Regression Models to Reconstruct Limb Kinematics from Low Frequency EEG Signals. PLoS ONE 2013, 8, e61976. [Google Scholar] [CrossRef]
- Acharya, S.; Fifer, M.S.; Benz, H.L.; Crone, N.E.; Thakor, N. V Electrocorticographic Amplitude Predicts Finger Positions during Slow Grasping Motions of the Hand. J. Neural Eng. 2010, 7, 046002. [Google Scholar] [CrossRef] [PubMed]
- Nachev, P.; Kennard, C.; Husain, M. Functional Role of the Supplementary and Pre-Supplementary Motor Areas. Nat. Rev. Neurosci. 2008, 9, 856–869. [Google Scholar] [CrossRef]
- Overduin, S.A.; d’Avella, A.; Roh, J.; Bizzi, E. Modulation of Muscle Synergy Recruitment in Primate Grasping. J. Neurosci. 2008, 28, 880–892. [Google Scholar] [CrossRef]
- Mason, C.R.; Theverapperuma, L.S.; Hendrix, C.M.; Ebner, T.J. Monkey Hand Postural Synergies during Reach-to-Grasp in the Absence of Vision of the Hand and Object. J. Neurophysiol. 2004, 91, 2826–2837. [Google Scholar] [CrossRef]
- Holdefer, R.N.; Miller, L.E. Primary Motor Cortical Neurons Encode Functional Muscle Synergies. Exp. Brain Res. 2002, 146, 233–243. [Google Scholar] [CrossRef]
- Mollazadeh, M.; Aggarwal, V.; Thakor, N.V.; Schieber, M.H. Principal Components of Hand Kinematics and Neurophysiological Signals in Motor Cortex during Reach to Grasp Movements. J. Neurophysiol. 2014, 112, 1857–1870. [Google Scholar] [CrossRef]
- Townsend, B.R.; Subasi, E.; Scherberger, H. Grasp Movement Decoding from Premotor and Parietal Cortex. J. Neurosci. 2011, 31, 14386–14398. [Google Scholar] [CrossRef]
- Desmurget, M.; Richard, N.; Harquel, S.; Baraduc, P.; Szathmari, A.; Mottolese, C.; Sirigu, A. Neural Representations of Ethologically Relevant Hand/Mouth Synergies in the Human Precentral Gyrus. Proc. Natl. Acad. Sci. USA 2014, 111, 5718–5722. [Google Scholar] [CrossRef]
- Perez, M.; Rothwell, J.C. Distinct Influence of Hand Posture on Cortical Activity during Human Grasping. J. Neurosci. 2015, 35, 4882–4889. [Google Scholar] [CrossRef]
- Rana, M.; Yani, M.S.; Asavasopon, S.; Fisher, B.E.; Kutch, J.J. Brain Connectivity Associated with Muscle Synergies in Humans. J. Neurosci. 2015, 35, 14708–14716. [Google Scholar] [CrossRef]
- Tagliabue, M.; Ciancio, A.L.; Brochier, T.; Eskiizmirliler, S.; Maier, M.A. Differences between Kinematic Synergies and Muscle Synergies during Two-Digit Grasping. Front. Hum. Neurosci. 2015, 9, 165. [Google Scholar] [CrossRef]
- Yuan, K.; Chen, C.; Wang, X.; Chu, W.C.W.; Tong, R.K.Y. Bci Training Effects on Chronic Stroke Correlate with Functional Reorganization in Motor-Related Regions: A Concurrent Eeg and Fmri Study. Brain Sci. 2021, 11, 1–16. [Google Scholar] [CrossRef]
- Lopez-Larraz, E.; Ray, A.M.; Figueiredo, T.C.; Bibian, C.; Birbaumer, N.; Ramos-Murguialday, A. Stroke Lesion Location Influences the Decoding of Movement Intention from EEG. In Proceedings of the 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jeju, Korea, 11–15 July 2017; 2017; 2017, pp. 3065–3068. [Google Scholar] [CrossRef]
- Bönstrup, M.; Krawinkel, L.; Schulz, R.; Cheng, B.; Feldheim, J.; Thomalla, G.; Cohen, L.G.; Gerloff, C. Low-Frequency Brain Oscillations Track Motor Recovery in Human Stroke. Ann. Neurol. 2019, 86, 853–865. [Google Scholar] [CrossRef]
- Antelis, J.M.; Montesano, L.; Ramos-Murguialday, A.; Birbaumer, N.; Minguez, J. Decoding Upper Limb Movement Attempt From EEG Measurements of the Contralesional Motor Cortex in Chronic Stroke Patients. IEEE Trans. Biomed. Eng. 2017, 64, 99–111. [Google Scholar] [CrossRef]
- Chen, C.C.; Lee, S.H.; Wang, W.J.; Lin, Y.C.; Su, M.C. EEG-Based Motor Network Biomarkers for Identifying Target Patients with Stroke for Upper Limb Rehabilitation and Its Construct Validity. PLoS ONE 2017, 12, e0178822. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint angular velocities | |
| Matrix of joint angular velocities | |
| Synergy weights | |
| Matrix of synergy weights | |
| Kinematic synergies | |
| Matrix of kinematic synergies | |
| Matrix of neural features | |
| Regression coefficients | |
| Neural independency density of the synergy |
| Subject 1 | Subject 2 | Subject 3 | Subject 4 | Subject 5 | |
|---|---|---|---|---|---|
| Task 1 | 72.0 ± 8.0% | 65.1 ± 11.2% | 56.7 ± 20.5% | 69.2 ± 8.2% | 79.4 ± 7.1% |
| Task 2 | 84.4 ± 9.3% | 74.1 ± 10.0% | 77.5 ± 6.2% | 77.7 ± 9.3% | 74.1 ± 12.8% |
| Task 3 | 89.9 ± 6.3% | 83.7 ± 14.8% | 80.9 ± 13.2% | 84.5 ± 10.4% | 78.7 ± 9.3% |
| Task 4 | 75.5 ± 6.4% | 59.3 ± 12.9% | 75.1 ± 7.5% | 72.2 ± 9.8% | 64.6 ± 15.4% |
| Task 5 | 84.3 ± 7.0% | 82.2 ± 7.2% | 82.1 ± 8.7% | 70.5 ± 10.3% | 79.8 ± 7.1% |
| Task 6 | 77.4 ± 6.6% | 81.0 ± 6.4% | 80.1 ± 7.7% | 73.7 ± 7.4% | 80.8 ± 8.1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pei, D.; Olikkal, P.; Adali, T.; Vinjamuri, R. Reconstructing Synergy-Based Hand Grasp Kinematics from Electroencephalographic Signals. Sensors 2022, 22, 5349. https://doi.org/10.3390/s22145349
Pei D, Olikkal P, Adali T, Vinjamuri R. Reconstructing Synergy-Based Hand Grasp Kinematics from Electroencephalographic Signals. Sensors. 2022; 22(14):5349. https://doi.org/10.3390/s22145349
Chicago/Turabian StylePei, Dingyi, Parthan Olikkal, Tülay Adali, and Ramana Vinjamuri. 2022. "Reconstructing Synergy-Based Hand Grasp Kinematics from Electroencephalographic Signals" Sensors 22, no. 14: 5349. https://doi.org/10.3390/s22145349
APA StylePei, D., Olikkal, P., Adali, T., & Vinjamuri, R. (2022). Reconstructing Synergy-Based Hand Grasp Kinematics from Electroencephalographic Signals. Sensors, 22(14), 5349. https://doi.org/10.3390/s22145349