
Exercise Condition Sensing in Smart Leg Extension Machine


Abstract
:1. Introduction
2. Materials and Methods
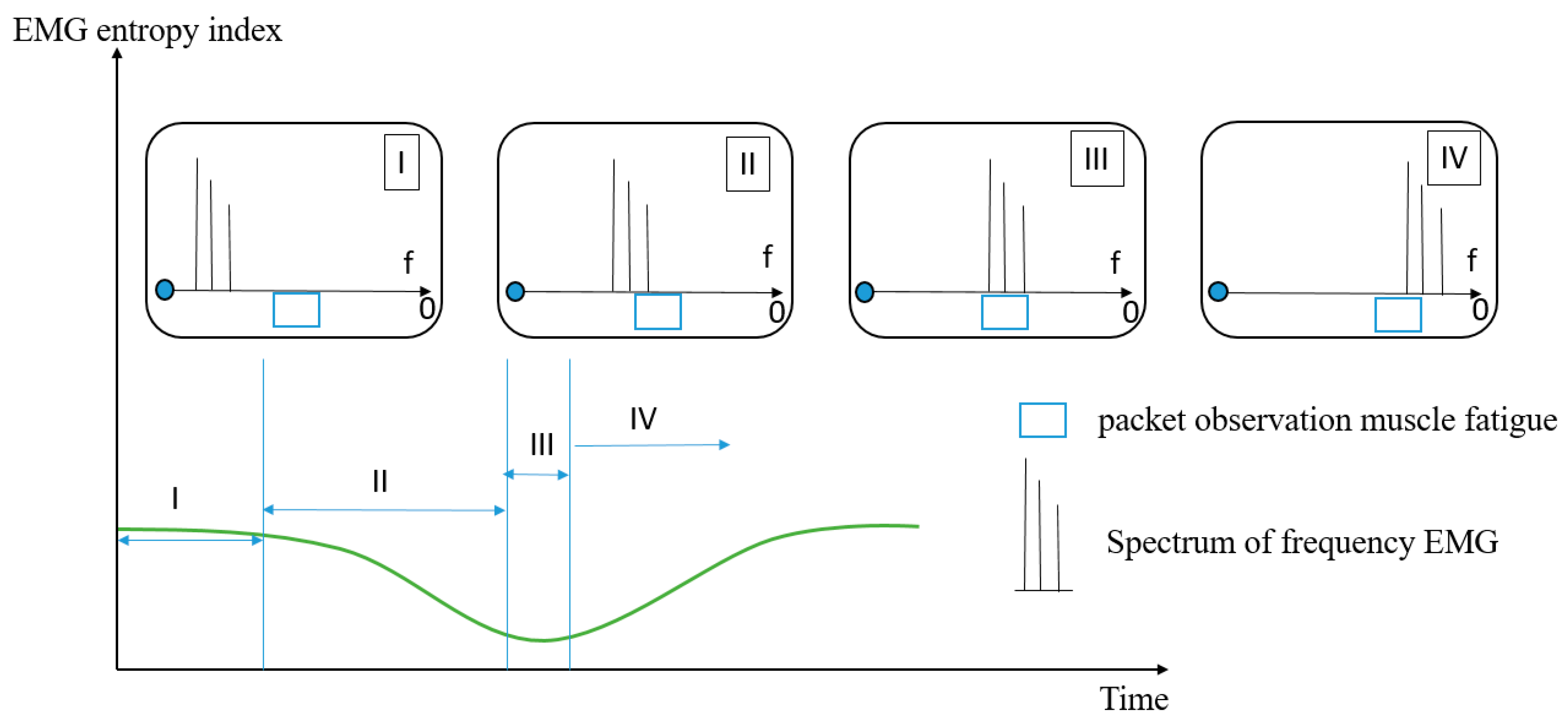
2.1. Muscle Model and Condition Sensing
2.2. Evaluating the Real-Time Index Condition Extension
2.2.1. Participants
2.2.2. Wavelet Packet Transform and Wavelet Entropy
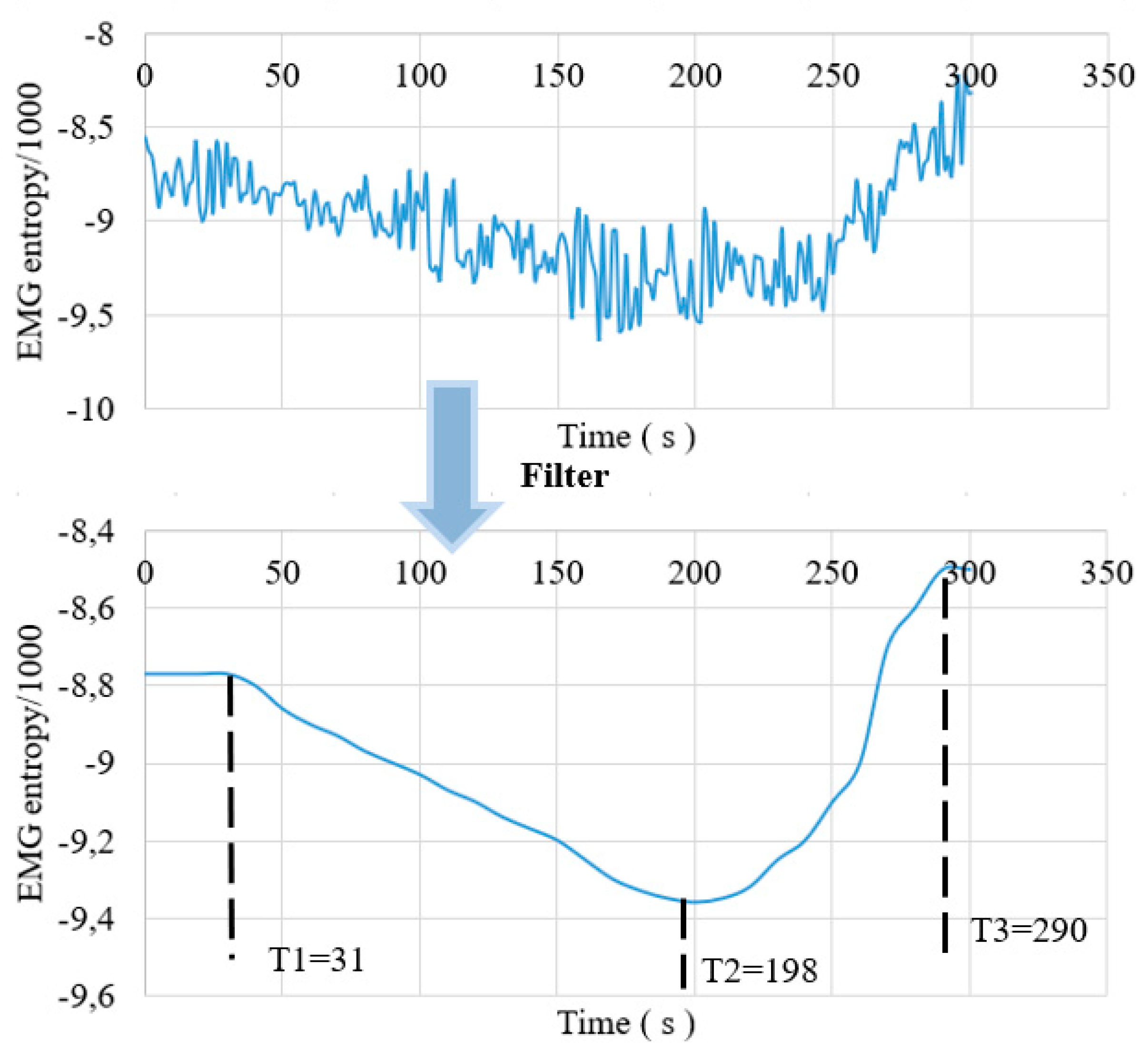
2.2.3. Data Processing
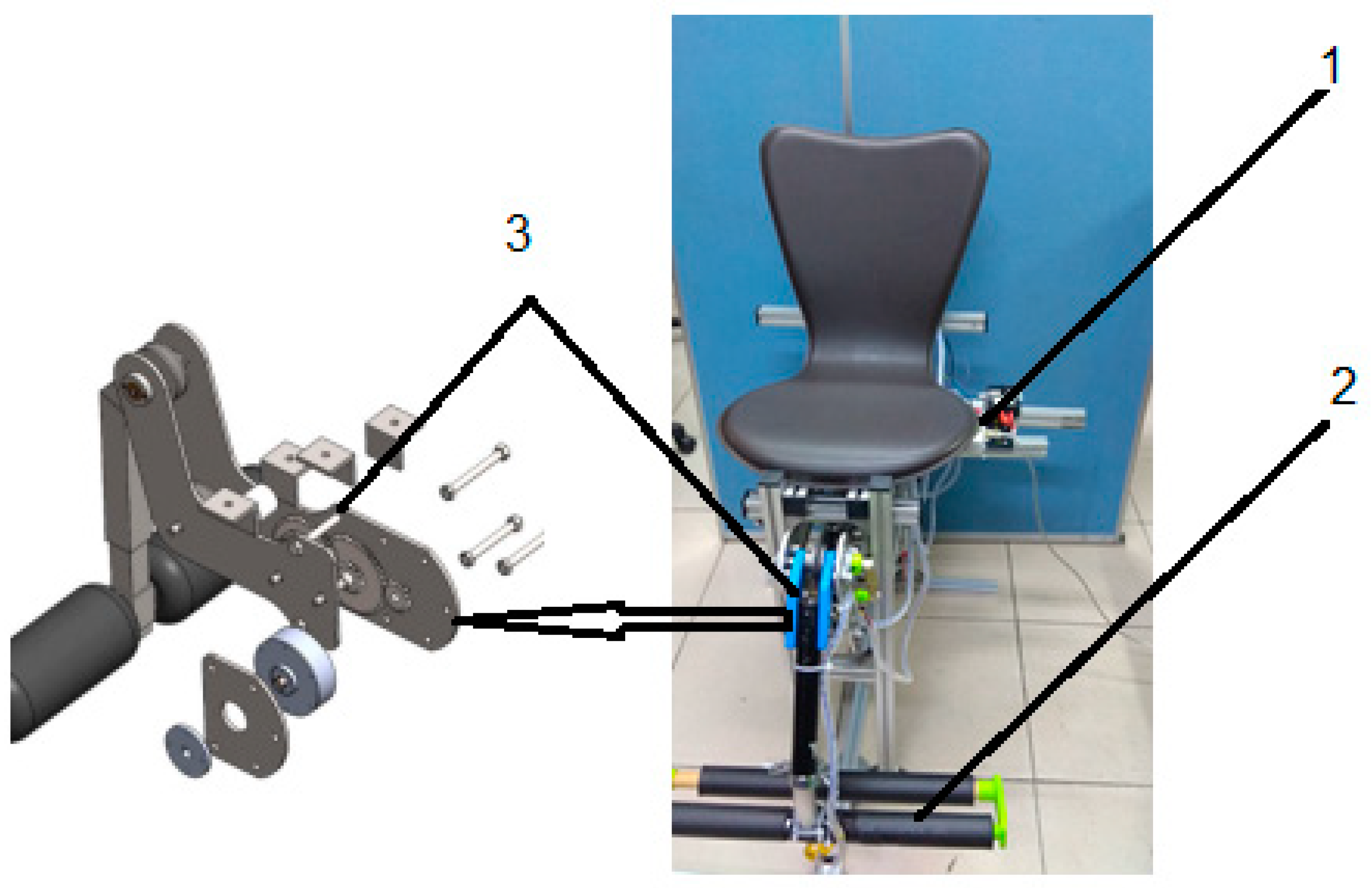
2.2.4. Hardware Design
2.2.5. Acceleration and Entropy Detection Analysis
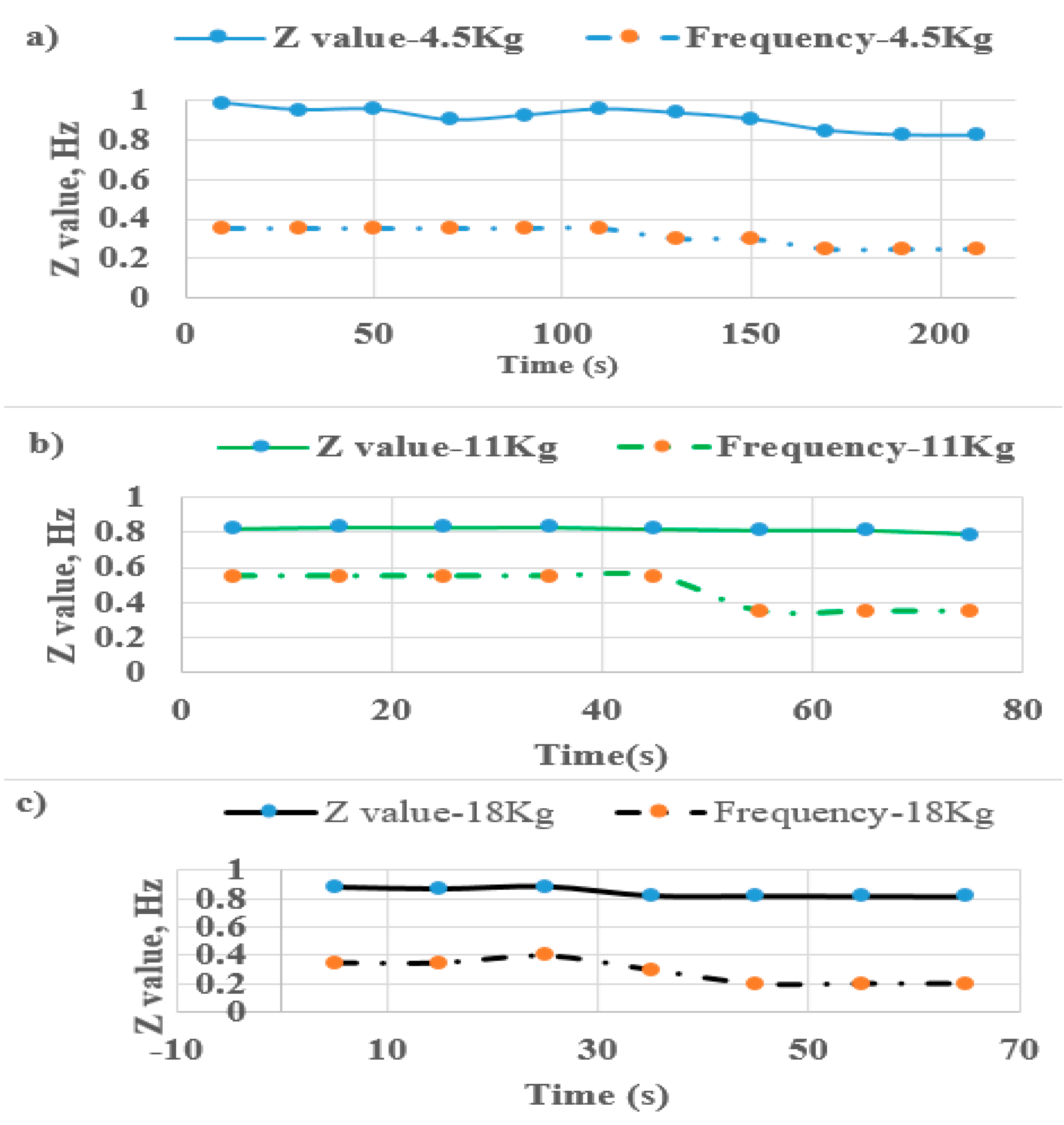
2.2.6. Detection and Analysis of Entropy Values under Different Loads
3. Results and Discussion
3.1. Observation Results
3.2. Statistical Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Shiao, Y.; Santillan, E. A Smart variable-resistance leg extension machine using magneto-rheological technology. Automation 2018, 4–8. [Google Scholar]
- Buckner, S.L.; Dankel, S.J.; Mattocks, K.T.; Jessee, M.B. The problem of muscle hypertrophy: Revisited. Muscle Nerve 2016, 54, 1012–1014. [Google Scholar] [CrossRef] [PubMed]
- Brentano, M.A.; Umpierre, D.; Santos, L.P.; Lopes, A.L.; Radaelli, R.; Pinto, R.S.; Kruel, L.F.M. Muscle damage and muscle activity induced by strength training super-sets in physically active men. J. Strength Cond. Res. 2017, 31, 1847–1858. [Google Scholar] [CrossRef] [PubMed]
- Schoenfeld, B.J. Does exercise-induced muscle damage play a role in skeletal muscle hypertrophy? J. Strength Cond. Res. 2012, 26, 1441–1453. [Google Scholar] [CrossRef]
- Hornsby, W.G.; Gentles, J.A.; Guy, H.; Michael, S.; Samuel, B.; Scott, D.; Zachary, B.; Takashi, A.; Jeremy, L. What is the impact of muscle hypertrophy on strength and sport performance? Strength Cond. J. 2018, 40, 99–111. [Google Scholar] [CrossRef]
- Schoenfeld, B.J. The mechanisms of muscle hypertrophy and their application to resistance training. Strength Cond. J. 2010, 24, 2857–2874. [Google Scholar] [CrossRef]
- Shiao, Y.N.; Ngoc, A.; Lai, C.H. Optimal design of a new multipole bilayer magnetorheological brake. Smart Mater. Struct. 2016, 25, 115015. [Google Scholar] [CrossRef]
- Shiao, Y.; Nguyen, Q.A. Development of a multi-pole magnetorheological brake. Smart Mater. Struct. 2013, 22, 6. [Google Scholar] [CrossRef]
- Shiao, Y.; Chang, T.; Lai, C. Gait identification by inertial sensors for control of adaptive knee orthosis device. Sens. Mater. 2017, 29, 1657. [Google Scholar]
- Faude, O.; Kindermann, W.; Meyer, T. Lactate threshold concepts how valid are they? CNS Drugs 2007, 21, 885–900. [Google Scholar]
- Poole, D.C.; Barstow, T.J.; Mcdonough, P.; Jones, A.M. Control of oxygen uptake during exercis. Med. Sci. Sports Exerc. 2008, 40, 462–474. [Google Scholar] [CrossRef] [PubMed]
- Haseler, L.J.; Kindig, C.A.; Richardson, R.S.; Hogan, M.C. The role of oxygen in determining phosphocreatine onset kinetics in exercising humans. J. Physiol. 2004, 558, 985–992. [Google Scholar] [CrossRef] [PubMed]
- Hogan, M.C.; Arthur, P.G.; Bebout, D.E.; Hochachka, P.W.; Wagner, P.D. Role of O2 in regulating tissue respiration in dog muscle working in situ. J. Appl. Physiol. 1992, 73, 728–736. [Google Scholar] [CrossRef] [PubMed]
- Wilson, D.; Ereciictska, M.; Drown, C.; Silver, A.L. Effect of oxwen tension on cellular energetics. Am. J. Physiol. 1977, 233, C135–C140. [Google Scholar] [CrossRef]
- Myint, C.Z.; Barsoum, N.; Ing, W.K. Design a medicine device for blood oxygen concentration and heart beat rate. Signal Process. 2010, 1, 68–71. [Google Scholar]
- Costa, C.D.; Polus, B.; Cosic, I.; Kumar, D.K.; Abdul-latif, A.A. Power changes of EEG signals associated with muscle fatigue: The root mean square analysis of EEG bands. In Proceedings of the 2004 Intelligent Sensors, Sensor Networks and Information Processing Conference, Melbourne, Australia, 14–17 December 2004; pp. 531–534. [Google Scholar]
- Top, E. The effect of fatigue exercise on the electromyogram (EMG) and balance performance of individuals with mental disability. Biomed. Res. 2017, 28, 620–624. [Google Scholar]
- Cao, L.; Wang, Y.; Hao, D.; Rong, Y.; Yang, L.; Zhang, S.; Zheng, D. Effects of force load, muscle fatigue, and magnetic stimulation on surface electromyography during side arm lateral raise task: A preliminary study with healthy subjects. Biomed. Res. Int. 2017, 2017, 8943850. [Google Scholar] [CrossRef]
- Barnett, C.; Kippers, V.; Turner, P. Effects of variations of the bench press exercise on the EMG activity of five shoulder muscles. J. Strength Cond. Res. 1995, 9, 222–227. [Google Scholar]
- Avila-Mireles, E.J.; Ruiz-Sánchez, F.J.; García-Salazar, O. EMG patterns induced in upper limb by haptic guidance for diagnosis and treatment evaluation. In Proceedings of the 2015 12th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 28–30 October 2015. [Google Scholar]
- Triwiyanto, T.; Wahyunggoro, O.; Nugroho, H.A.; Herianto, H. Muscle fatigue compensation of the electromyography signal for elbow joint angle estimation using adaptive feature. Comput. Electr. Eng. 2018, 71, 284–293. [Google Scholar] [CrossRef]
- Subasi, A.; Kiymik, M.K. Muscle fatigue detection in EMG using time-frequency methods, ICA and neural networks. J. Med. Syst. 2010, 34, 777–785. [Google Scholar] [CrossRef]
- Shair, E.F.; Ahmad, S.A.; Marhaban, M.H.; Tamrin, S.B.M.; Abdullah, A.R. EMG processing based measures of fatigue assessment during manual lifting. Biomed. Res. Int. 2017, 2017, 3937254. [Google Scholar] [CrossRef] [PubMed]
- Press, P.; Zajac, E.; Gordon, E. Musculoskeletal model of the human lower extremity: The effect of muscle, tendon, and moment arm on the moment angle relationship of musculotendon actuators at the hip, knee, and ankle. Biomechanics 1990, 23, 157–169. [Google Scholar]
- Sherwood, L. Introduction to Human Physiology, 8th ed.; Thomson Brooks/Cole: Pacific Grove, CA, USA, 2012. [Google Scholar]
- Uliam, H.; deAzevedo, F.M.; Takahashi, L.S.O.; Moraes, E.; Filho, R.F.N.; Alves, N. The relationship between electromyography and muscle force. In EMG Methods for Evaluating Muscle and Nerve Function; Schwartz, M., Ed.; IntechOpen: Rijeka, Croatia, 2012. [Google Scholar]
- Huang, S.; Ferris, D.P. Muscle activation patterns during walking from transtibial amputees recorded within the residual limb-prosthetic interface. J. Neuroeng. Rehabil. 2012, 9, 55. [Google Scholar] [CrossRef] [PubMed]
- Ament, W.; Verkerke, G. Exercise and fatigue. Sport. Med. 2009, 39, 389–422. [Google Scholar] [CrossRef] [PubMed]
- Wan, J.J.; Qin, Z.; Wang, P.Y.; Sun, Y.; Liu, X. Muscle fatigue: General understanding and treatment. Exp. Mol. Med. 2017, 49, e384. [Google Scholar] [CrossRef]
- Gaesser, G.A.; Poole, D.C. The slow component of oxygen uptake kinetics in humans. Exerc. Sport Sci. Rev. 1996, 24, 35–70. [Google Scholar] [CrossRef]
- Merlo, A.; Campanini, I. Technical aspects of surface electromyography for clinicians. Open Rehabil. J. 2014, 3, 98–109. [Google Scholar] [CrossRef]
- Kallenberg, L.A.C.; Schulte, E.; Disselhorst-Klug, C.; Hermens, H.J. Myoelectric manifestations of fatigue at low contraction levels in subjects with and without chronic pain. J. Electromyogr. Kinesiol 2007, 17, 264–274. [Google Scholar] [CrossRef]
- Naeije, M.; Zorn, H. Relation between EMG power spectrum shifts and muscle fibre action potential conduction velocity changes during local muscular fatigue in man. Eur. J. Appl. Physiol. Occup. Physiol. 1982, 50, 23–33. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Domain | Method |
|---|---|
| Frequency domain | FFT Autoregressive method Eigenvector |
| Time-frequency domain | Short-time Fourier transform Wavelet transform Wavelet packet |
| Time domain | RMS Mean |
| S/N | Name | Age | Gender |
|---|---|---|---|
| 1 | A | 24 | Male |
| 2 | B | 26 | Male |
| 3 | C | 23 | Male |
| 4 | D | 25 | Male |
| 5 | E | 23 | Male |
| α = 0.05 | Standard Deviation of EMG Entropy = 0.000891 | ||||||
|---|---|---|---|---|---|---|---|
| Standard Deviation Time of Muscle Fatigue = 2 | |||||||
| Subject | EMG Entropy of No-Fatigue | Time of Muscle Fatigue under 4.5 kg (s) | Time of Muscle Fatigue under 11 kg (s) | Time of Muscle Fatigue under 18 kg (s) | EMG Entropy of Muscle Fatigue at 4.5 kg | EMG Entropy of Muscle Fatigue at 11 kg | EMG Entropy of Muscle Fatigue at 18 kg |
| A | −1 | 198 | 100 | 30 | −1.06727 | −1.10180 | −1.03953 |
| B | −1 | 120 | 65 | 32 | −1.06147 | −1.06024 | −1.06977 |
| C | −1 | 140 | 90 | 60 | −1.02911 | −1.08497 | −1.04079 |
| D | −1 | 165 | 70 | 50 | −1.01779 | −1.08025 | −1.04706 |
| E | −1 | 160 | 99 | 55 | −1.04201 | −1.12961 | −1.09091 |
| p-value (no-fatigue–muscle fatigue) at same load | 0.009713 | 0.001418 | 0.002182 | ||||
| α = 0.05 | Standard Deviation Frequency = 0.01 Hz | |||||
|---|---|---|---|---|---|---|
| Subject | Frequency Non-Fatigue of Machine under 4.5 kg (Hz) | Frequency Non-Fatigue of Machine under 11 kg (Hz) | Frequency Non-Fatigue of Machine under 18 kg (Hz) | Frequency Fatigue of Machine at 4.5 kg (Hz) | Frequency Fatigue of Machine at 11 kg (Hz) | Frequency Fatigue of Machine at 18 kg (Hz) |
| A | 0.35 | 0.55 | 0.35 | 0.25000 | 0.35000 | 0.20000 |
| B | 0.35 | 0.55 | 0.50 | 0.15000 | 0.20000 | 0.15000 |
| C | 0.55 | 0.35 | 0.35 | 0.18000 | 0.20000 | 0.20000 |
| D | 0.56 | 0.58 | 0.45 | 0.24000 | 0.10000 | 0.30000 |
| E | 0.62 | 0.60 | 0.40 | 0.19000 | 0.20000 | 0.20000 |
| p-value (no-fatigue–muscle fatigue) at same load | 0.00885 | 0.00689 | 0.00668 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shiao, Y.; Hoang, T. Exercise Condition Sensing in Smart Leg Extension Machine. Sensors 2022, 22, 6336. https://doi.org/10.3390/s22176336
Shiao Y, Hoang T. Exercise Condition Sensing in Smart Leg Extension Machine. Sensors. 2022; 22(17):6336. https://doi.org/10.3390/s22176336
Chicago/Turabian StyleShiao, Yaojung, and Thang Hoang. 2022. "Exercise Condition Sensing in Smart Leg Extension Machine" Sensors 22, no. 17: 6336. https://doi.org/10.3390/s22176336
APA StyleShiao, Y., & Hoang, T. (2022). Exercise Condition Sensing in Smart Leg Extension Machine. Sensors, 22(17), 6336. https://doi.org/10.3390/s22176336