
Single LED, Single PD-Based Adaptive Bayesian Tracking Method

Abstract
:1. Introduction
- All LED signals must satisfy the line-of-sight (LOS) condition based on the element’s field of view (FOV) to receive multiple LED-PD signal information [1].
- -
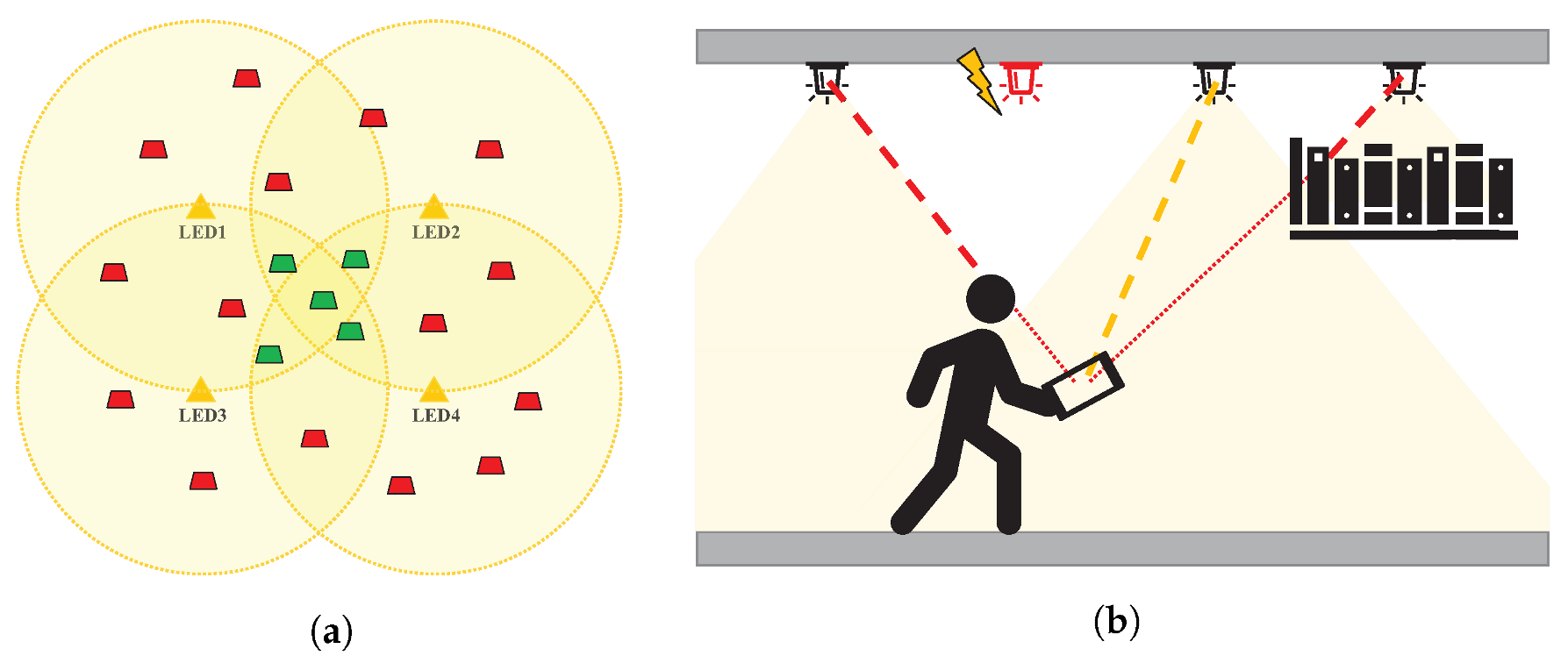
- In Figure 1a, the area in which an optical signal can be stably received from each LED is fairly large (yellow circles ), while the area in which multiple signal-based positioning can be performed is quite limited (green trapezoids). Even if one or more signals can be stably received in the remaining area, positioning them is structurally impossible (red trapezoids).
- -
- LOS may not be guaranteed in various indoor and outdoor environments due to unexpected obstacles, user shadows, and extreme situations such as element failure (Figure 1b). If positioning is performed based on a single optical signal, the resulting area of positioning can be very wide.
- When the radiation and incident angles exceed the FOV of each element, the error in the received signal gain increases exponentially [5]. Even if the FOV is adjusted to handle this problem, a large FOV results in poor accuracy owing to ambient or reflective light [6], whereas a small FOV results in the PD not receiving LED signals correctly [7].
- There can be issues with LED management and reliability. Depending on the device characteristics, the junction temperature of an LED may change due to the driving current, ambient temperature, and self-heating. The main wavelength, signal efficiency, and characteristics of the LED may change according to changes in temperature [8,9,10]. LED signal power may degrade over time, creating error directionality and adversely affecting overall positioning accuracy [1,11].
- Multiple PD-based VLP methods [18,19,20,21,22,23] have been developed to produce multiple LED-to-PD signals in a single-LED environment. These studies include a method using a horizontal PD arrangement spaced at arbitrary intervals [18,19], a method using angular diversity detectors [20,21], and a method combining the two methods [22,23]. However, these methods require bulky receiving devices, and it is difficult to secure the viewing angle for all PDs.
- There exist a few recent studies exploiting a single LED signal. Image sensor arrays can capture the geometrical features of a single LED signal for complete identification [24,25]. However, such devices typically have limited scan rates (30–60 Hz) for the entire sensor array. It is difficult to increase the modulation frequency and extend signal bandwidths. This further limits the noise immunity of VLP systems. Li et al. employed a special LED lamp for VLP, although this required additional small luminescent beacons [26].
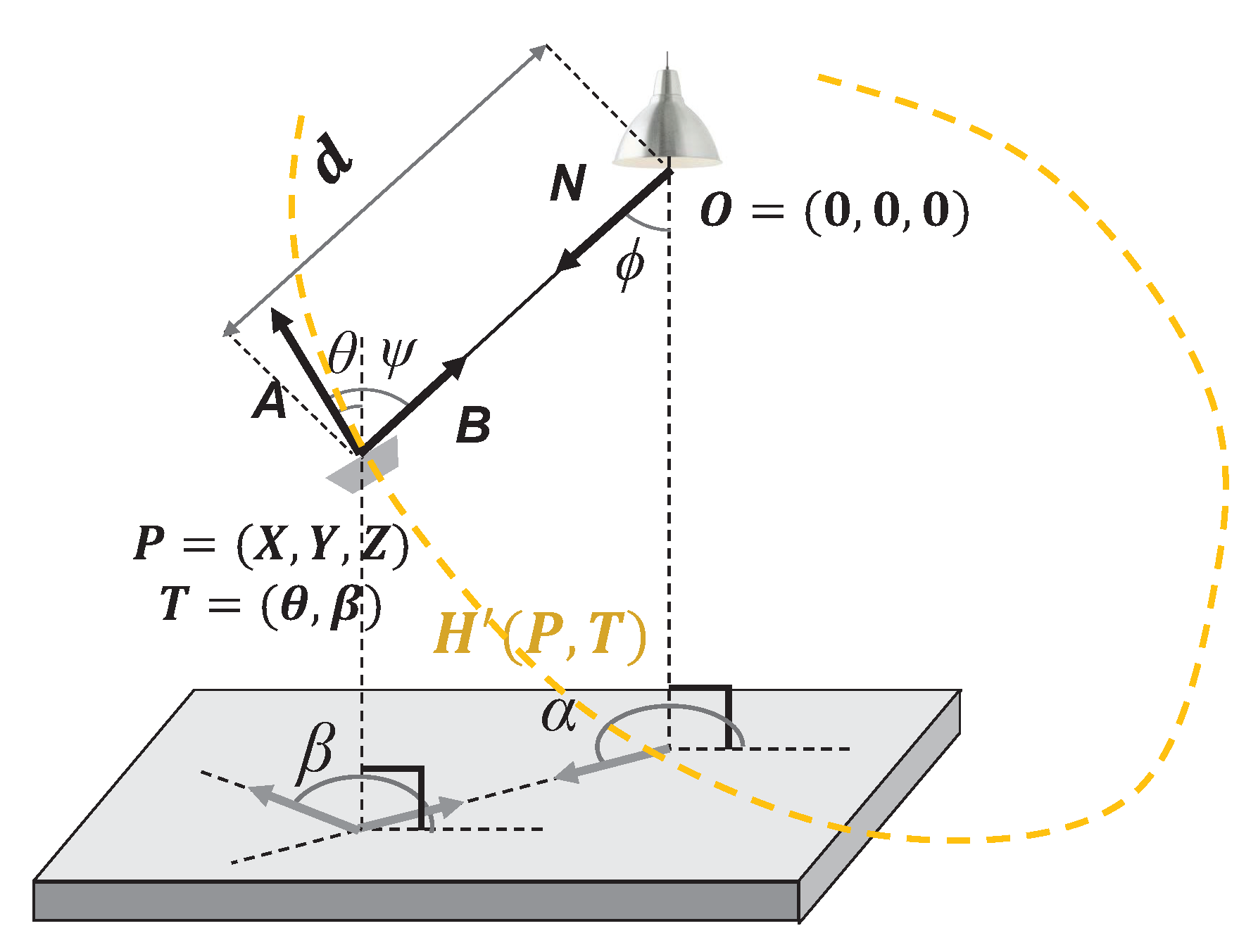
- The general positioning environment, where the receiver and transmitter are not facing each other in parallel and the height is not limited, has not been sufficiently studied [2,6,27]. Because the optical signal pattern includes the cosine of the incidence angle () and the radiation angle (), the calculation becomes very complicated when the receiver is not horizontal. The effect of the X- and Y-axis movements is greater than the effect of the Z-axis movement, and it is relatively difficult to accurately estimate the height of the receiver. In our previous study [2], we investigated the existing problems with conventional VLP studies and analyzed in detail the reasons that these problems were difficult to solve. However, in [28], a new statistical model for device orientation was established based on the observation results of several participants using a smartphone. The authors showed that an average polar angle of with a standard deviation of occurred during walking activities.

- By requiring only one pair of optical signals, most of the fatal problems of conventional multi-source VLPs are solved. Because the proposed method requires the stable reception of only one signal, the operational coverage is very wide (Figure 1a, red trapezoids) and there are few restrictions due to obstacles (Figure 1b). Furthermore, by combining the INS results, positioning can be maintained even in a region where optical signals are blocked.
- The proposed method can effectively adjust the initial distribution of the particle filter using the optical signal intensity information. We propose an index called “particle reliability” which evaluates the overall particle behavior. Through this index, the number of particles is flexibly adjusted; thus, the calculation burden of the particle filter is reduced. Online tracking is guaranteed for a nonlinear system with non-Gaussian noise by effectively reducing the computational cost of the particle filter.
- Based on the absolute position of the LED signal, the system itself can estimate its own position even if it does not have any previous state information. The proposed algorithm corrects the long-term cumulative error of the INS based on the continuity of optical positioning.
2. Optical Model Representation in Cartesian Coordinate System
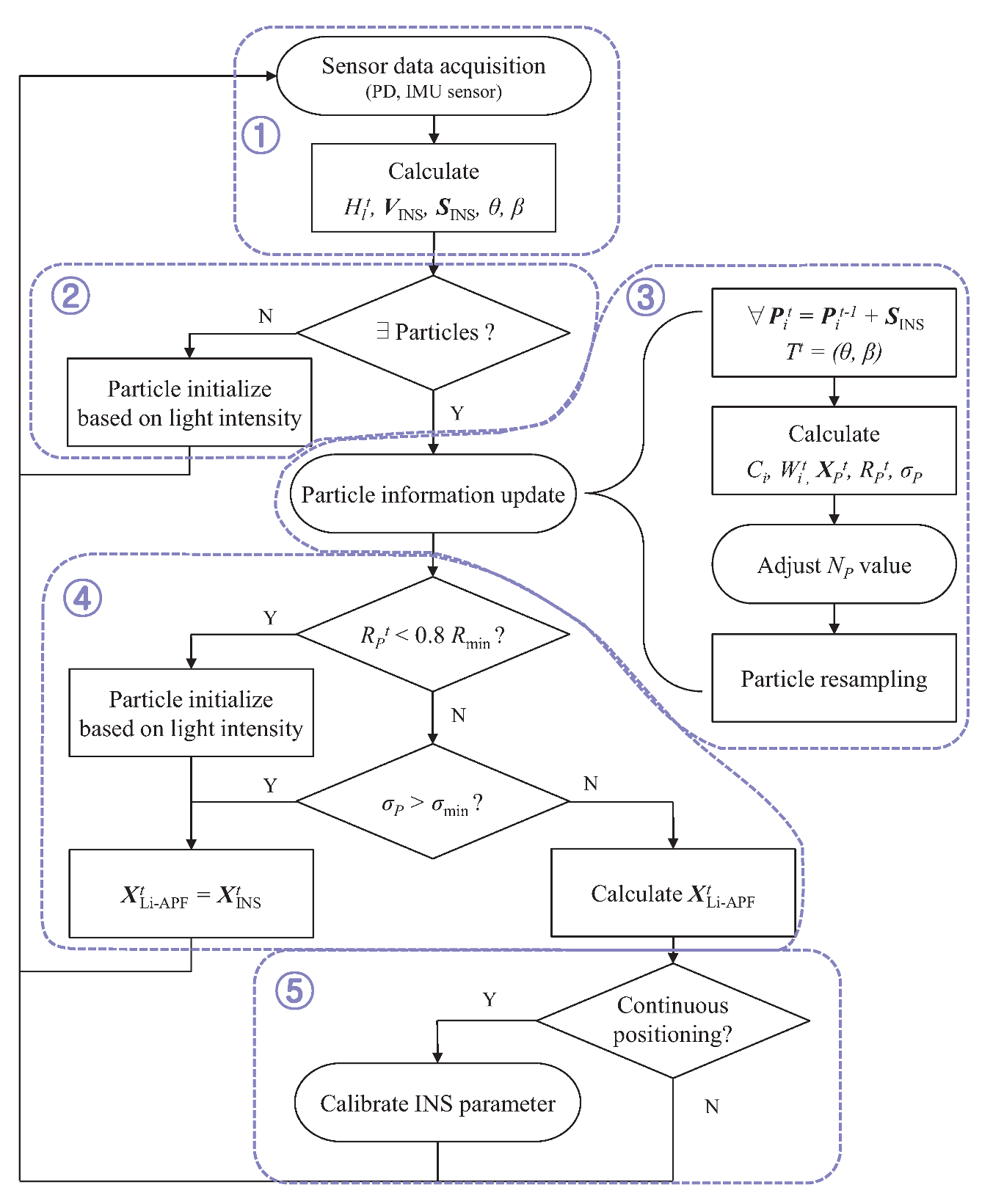
3. Single Visible Light Signal-Based Tracking Algorithm
3.1. Sensor Data Acquisition and Analysis Process
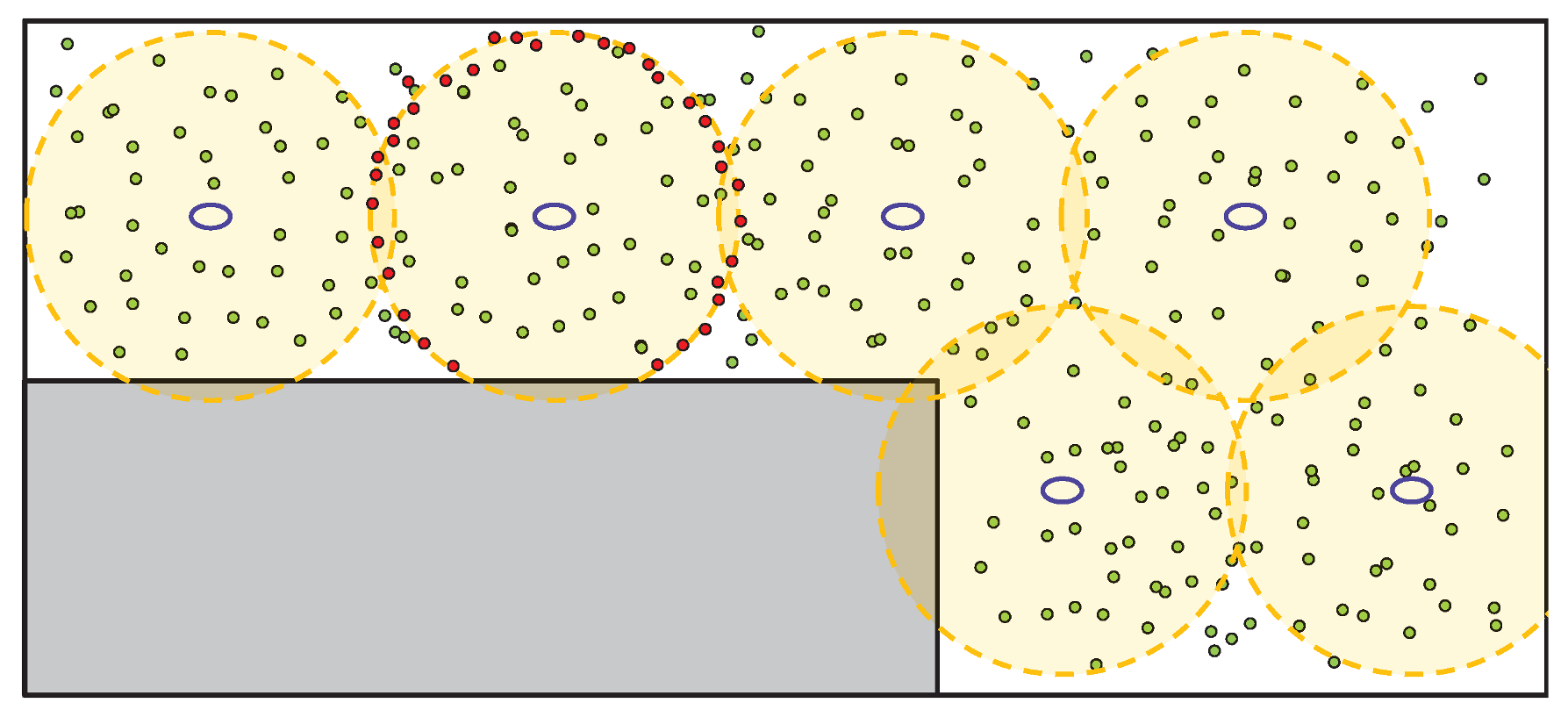
3.2. Particle Initialization Process
3.3. Particle Updating Process
3.4. Decision through Weighted Average with INS
3.5. INS Calibration Using Particle Information
4. Particle Update Simulation
5. Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, D.; Park, J.K.; Kim, J.T. High-Efficient and Low-Cost Biased Multilevel Modulation Technique for IM/DD-Based VLP Systems. IEEE Access 2020, 8, 218954–218965. [Google Scholar] [CrossRef]
- Kim, D.; Park, J.K.; Kim, J.T. Three-dimensional VLC positioning system model and method considering receiver tilt. IEEE Access 2019, 7, 132205–132216. [Google Scholar] [CrossRef]
- Chuang, Y.C.; Li, Z.Q.; Hsu, C.W.; Liu, Y.; Chow, C.W. Visible light communication and positioning using positioning cells and machine learning algorithms. Opt. Express 2019, 27, 16377–16383. [Google Scholar] [CrossRef] [PubMed]
- Cai, Y.; Guan, W.; Wu, Y.; Xie, C.; Chen, Y.; Fang, L. Indoor high precision three-dimensional positioning system based on visible light communication using particle swarm optimization. IEEE Photonics J. 2017, 9, 1–20. [Google Scholar] [CrossRef]
- Lin, B.; Tang, X.; Ghassemlooy, Z.; Lin, C.; Li, Y. Experimental demonstration of an indoor VLC positioning system based on OFDMA. IEEE Photonics J. 2017, 9, 1–9. [Google Scholar] [CrossRef]
- Kim, H.S.; Kim, D.R.; Yang, S.H.; Son, Y.H.; Han, S.K. An indoor visible light communication positioning system using a RF carrier allocation technique. J. Light. Technol. 2012, 31, 134–144. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Lee, D.H.; Lee, S.Y.; Shim, J.I.; Seong, T.Y.; Amano, H. Effects of Current, Temperature, and Chip Size on the Performance of AlGaInP-Based Red Micro-Light-Emitting Diodes with Different Contact Schemes. ECS J. Solid State Sci. Technol. 2021, 10, 095001. [Google Scholar] [CrossRef]
- Ishii, R.; Koyama, Y.; Funato, M.; Kawakami, Y. Microscopic origin of thermal droop in blue-emitting InGaN/GaN quantum wells studied by temperature-dependent microphotoluminescence spectroscopy. Opt. Express 2021, 29, 22847–22854. [Google Scholar] [CrossRef]
- Mesleh, R.; Elgala, H.; Little, T.D. On the performance degradation of optical wireless OFDM communication systems due to changes in the LED junction temperature. In Proceedings of the International Conference on Telecommunications (ICT), Casablanca, Morocco, 6–8 May 2013; pp. 1–5. [Google Scholar]
- Chhajed, S.; Xi, Y.; Li, Y.L.; Gessmann, T.; Schubert, E.F. Influence of junction temperature on chromaticity and color-rendering properties of trichromatic white-light sources based on light-emitting diodes. J. Appl. Phys. 2005, 97, 54506. [Google Scholar] [CrossRef]
- Cui, L.; Tang, Y.; Jia, H.; Luo, J.; Gnade, B. Analysis of the multichannel WDM-VLC communication system. J. Light. Technol. 2016, 34, 5627–5634. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, H.; Zhao, X.; Lu, F.; Zhao, X.; Shao, X. Experimental demonstration of a two-path parallel scheme for m-QAM-OFDM transmission through a turbulent-air-water channel in optical wireless communications. Opt. Express 2019, 27, 6672–6688. [Google Scholar] [CrossRef]
- Azhar, A.H.; Tran, T.; O’brien, D. A gigabit/s indoor wireless transmission using MIMO-OFDM visible-light communications. IEEE Photonics Technol. Lett. 2012, 25, 171–174. [Google Scholar] [CrossRef]
- Jung, S.Y.; Kwon, D.H.; Yang, S.H.; Han, S.K. Reduction of inter-cell interference in asynchronous multi-cellular VLC by using OFDMA-based cell partitioning. In Proceedings of the 18th International Conference on Transparent Optical Networks (ICTON), Trento, Italy, 10–14 July 2016; pp. 1–4. [Google Scholar]
- Zhou, K.; Gong, C.; Gao, Q.; Xu, Z. Inter-cell interference coordination for multi-color visible light communication networks. In Proceedings of the IEEE Global Conference on Signal and Information Processing (GlobalSIP), Washington, DC, USA, 7–9 December 2016; pp. 6–10. [Google Scholar]
- Maheepala, M.; Kouzani, A.Z.; Joordens, M.A. Light-based indoor positioning systems: A review. IEEE Sens. J. 2020, 20, 3971–3995. [Google Scholar] [CrossRef]
- Yang, S.; Jung, E.; Han, S. Indoor location estimation based on LED visible light communication using multiple optical receivers. IEEE Commun. Lett. 2013, 17, 1834–1837. [Google Scholar] [CrossRef]
- Steendam, H.; Wang, T.Q.; Armstring, J. Theoretical lower bound for indoor visible light positioning using received signal strength measurements and an aperture-based receiver. J. Light. Technol. 2016, 35, 309–319. [Google Scholar] [CrossRef]
- Yang, S.H.; Kim, H.S.; Son, Y.H.; Han, S.K. Three-dimensional visible light indoor localization using AOA and RSS with multiple optical receivers. J. Light. Technol. 2014, 32, 2480–2485. [Google Scholar] [CrossRef]
- Mmbaga, P.F.; Thompson, J.; Haas, H. Performance analysis of indoor diffuse VLC MIMO channels using angular diversity detectors. J. Light. Technol. 2015, 34, 1254–1266. [Google Scholar] [CrossRef]
- Yu, X.; Wang, J.; Lu, H. Single LED-based indoor positioning system using multiple photodetectors. IEEE Photonics J. 2018, 10, 1–8. [Google Scholar] [CrossRef]
- Han, W.; Wang, J.; Lu, H.; Chen, D. Visible light indoor positioning via an iterative algorithm based on an M5 model tree. Appl. Opt. 2020, 59, 10194–10200. [Google Scholar] [CrossRef]
- Cheng, H.; Xiao, C.; Ji, Y.; Ni, J.; Wang, T. A Single LED Visible Light Positioning System Based on Geometric Features and CMOS Camera. IEEE Photonics Technol. Lett. 2020, 32, 1097–1100. [Google Scholar] [CrossRef]
- Zhang, R.; Zhong, W.D.; Kemao, Q.; Zhang, S. A Single LED Positioning System Based on Circle Projection. IEEE Photonics J. 2017, 9, 7905209. [Google Scholar] [CrossRef]
- Li, H.; Huang, H.; Xu, Y.; Wei, Z.; Yuan, S.; Lin, P.; Chen, Z. A Fast and High-Accuracy Real-Time Visible Light Positioning System Based on Single LED Lamp with a Beacon. IEEE Photonics J. 2020, 12, 1–12. [Google Scholar] [CrossRef]
- Karunatilaka, D.; Zafar, F.; Kalavally, V.; Parthiban, R. LED based indoor visible light communications: State of the art. IEEE Commun. Surv. Tutor. 2015, 17, 1649–1678. [Google Scholar] [CrossRef]
- Soltani, M.D.; Purwita, A.A.; Zeng, Z.; Haas, H.; Safari, M. Modeling the random orientation of mobile devices: Measurement, analysis and LiFi use case. IEEE Trans. Commun. 2018, 67, 2157–2172. [Google Scholar] [CrossRef]
- Farrell, J.; Barth, M. The Global Positioning System and Inertial Navigation; Mcgraw-Hill: New York, NY, USA, 1999. [Google Scholar]
- Savage, P.G. Strapdown inertial navigation integration algorithm design part 1: Attitude algorithms. J. Guid. Control. Dyn. 1998, 21, 19–28. [Google Scholar] [CrossRef]
- Kahn, J.M.; Barry, J.R. Wireless infrared communications. Proc. IEEE 1997, 85, 265–298. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter |
|---|---|
| The intensity of the received optical signal of the l-th channel previous and current. | |
| The reference (strongest) received optical signal strength previous and current. | |
| The instantaneous speed and unit time movement of the sensor. | |
| Vertical and horizontal tilt of the device. | |
| An ideal signal strength calculated according to a parameter. | |
| The initial reference optical signal strength, position and tilt of the i-th particle. | |
| Initialization value of particle weight. | |
| The position of the i-th particle previous and current. | |
| The tilt of the particles previous and current. | |
| The cost function value of the i-th particle. | |
| Weights of the i-th particles previous and current. | |
| Normalized current weight. | |
| Reliability of particles previous and current. | |
| Weighted deviation of the particle angles. | |
| The virtual position of the previous and current device. | |
| The virtual reference position of the previous and current device. | |
| The virtual position errors and generalization values of the previous | |
| and current reference device. | |
| The reference cost function value calculated through the virtual device position. | |
| The reference reliability calculated through the reference cost function value. | |
| The reference minimum weighted deviation of the particle angles. | |
| Total number of particles. | |
| The results of the particle positioning previous and current. | |
| The result of the INS positioning previous and current. | |
| The result of the Li-APF positioning previous and current. |
| Environment | Average Error [cm] | |||
|---|---|---|---|---|
| (Place/Tilt) | INS | Particle | Li-APF | |
| Classroom | Pose-1 () | 122.526 | 25.454 | 12.515 |
| Pose-2 () | 365.746 | 27.578 | 14.367 | |
| Pose-3 () | 527.970 | 18.141 | 8.569 | |
| Corridor | Pose-1 () | 153.775 | 19.210 | 10.222 |
| Pose-2 () | 203.258 | 22.890 | 11.014 | |
| Pose-3 () | 607.655 | 17.332 | 8.658 | |
| Average | 330.155 | 21.634 | 10.891 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Park, J.K.; Kim, J.T. Single LED, Single PD-Based Adaptive Bayesian Tracking Method. Sensors 2022, 22, 6488. https://doi.org/10.3390/s22176488
Kim D, Park JK, Kim JT. Single LED, Single PD-Based Adaptive Bayesian Tracking Method. Sensors. 2022; 22(17):6488. https://doi.org/10.3390/s22176488
Chicago/Turabian StyleKim, Duckyong, Jong Kang Park, and Jong Tae Kim. 2022. "Single LED, Single PD-Based Adaptive Bayesian Tracking Method" Sensors 22, no. 17: 6488. https://doi.org/10.3390/s22176488
APA StyleKim, D., Park, J. K., & Kim, J. T. (2022). Single LED, Single PD-Based Adaptive Bayesian Tracking Method. Sensors, 22(17), 6488. https://doi.org/10.3390/s22176488