
Ultra-Wideband Communication and Sensor Fusion Platform for the Purpose of Multi-Perspective Localization


Abstract
:1. Introduction
- Localization of system nodes relative to each other and the local environment.
- Sensor fusion of all 3D sensors available from each system in the network.
- 3D world simulation and mapping of the below points:
- -
- Display of nodes within system range relative to one another.
- -
- Display distance relative to each node to object(s).
- -
- Display multilateration of distance information from sensor fusion algorithm.
- If practical, robot operating system (ROS) deployment for easier development and off-system high-processing-power data analysis.
- -
- A testing environment that was 5 m in length by 5 m in width by 2.5 m in height.
- -
- Manipulatable objects with measured positions.
- -
- Assumption of no other UWB communication present within the test space.
2. Literature Review
2.1. Ultra-Wideband Communications and Its Context in Localization
- The high data rate provided by large bandwidth.
- Ranging data combined with communications data.
- Signal penetration through obstacles using total frequency allocation.
- Low power signals that have superior performance in multipath.
- Low complexity and cost hardware for the RF components.
2.2. Simultaneous Localization and Mapping (SLAM)
2.3. UWB in the Context of Robot Platforms Used for Localizations and Mapping
3. Methodologies
3.1. Design
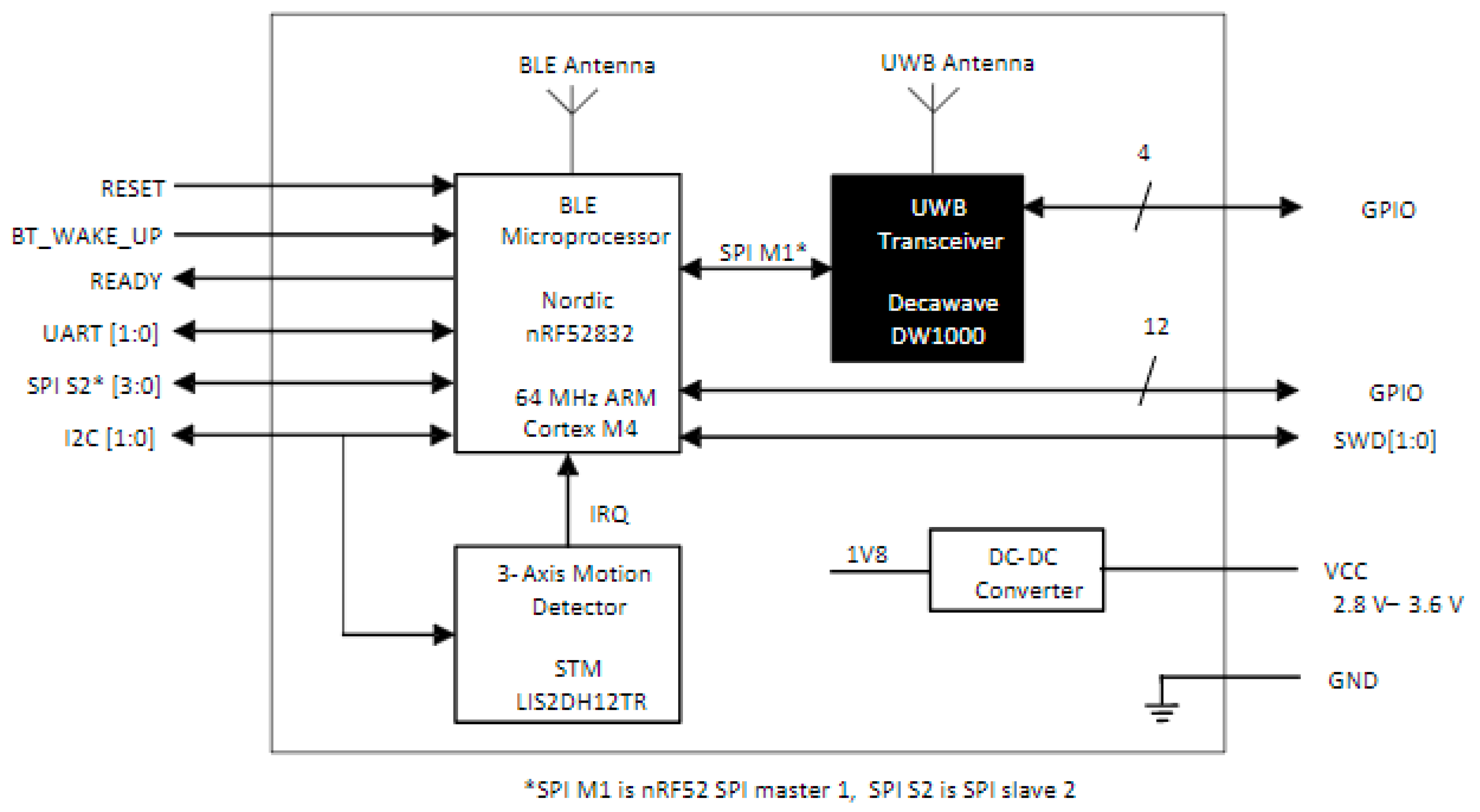
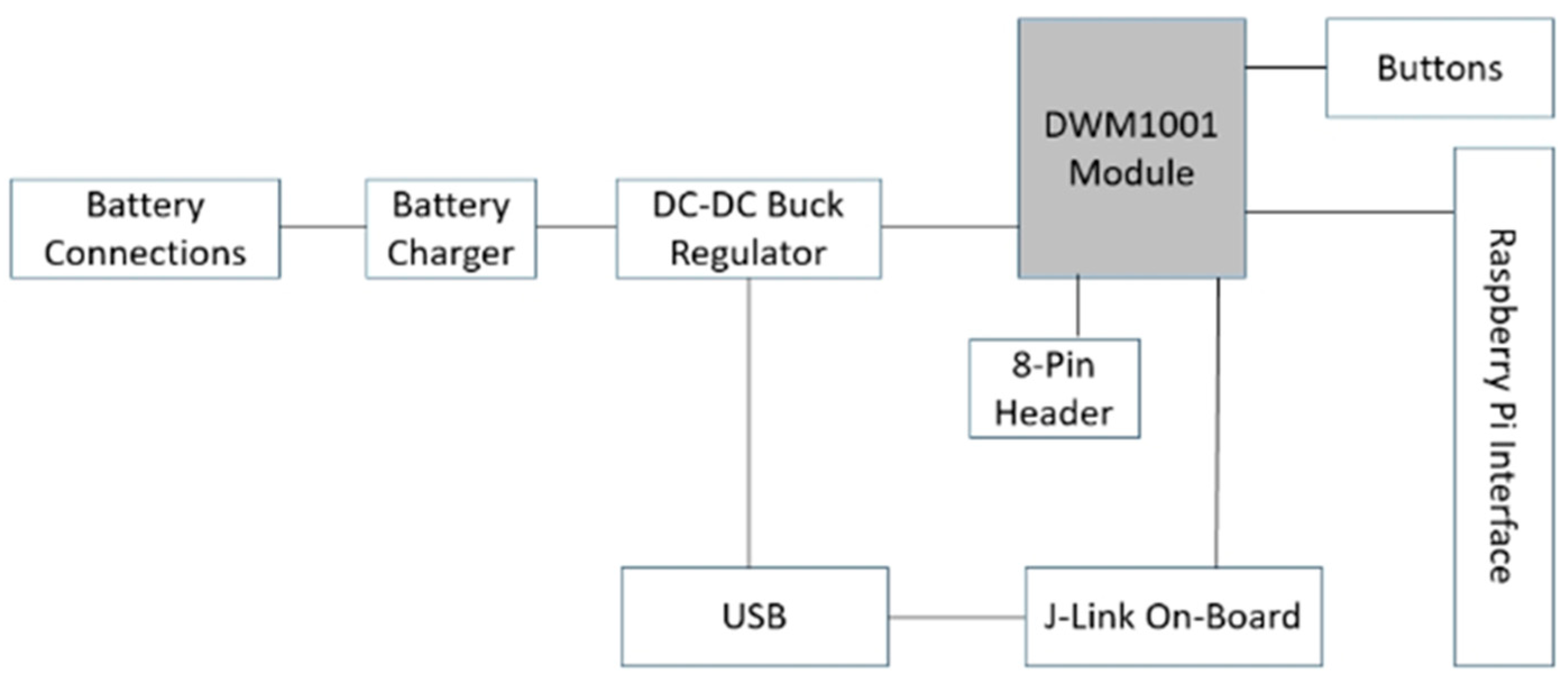
3.1.1. UWB Communications Module
3.1.2. Imaging Sensor
3.1.3. Single-Board Computer
3.1.4. ROS Melodic
- RealSense SDK 2.0 provides the backbone for running all the different types of cameras in the RealSense series to provide a variety of functionality to support most projects using either depth or tracking cameras made by Intel.
- DWM1001 ROS Package provides a python interface with DWM1001-DEV board to the ROS transform “tf” package 3D coordinate frames, allowing the positions of the Decawave modules with RTLS tied to (0, 0, 0).
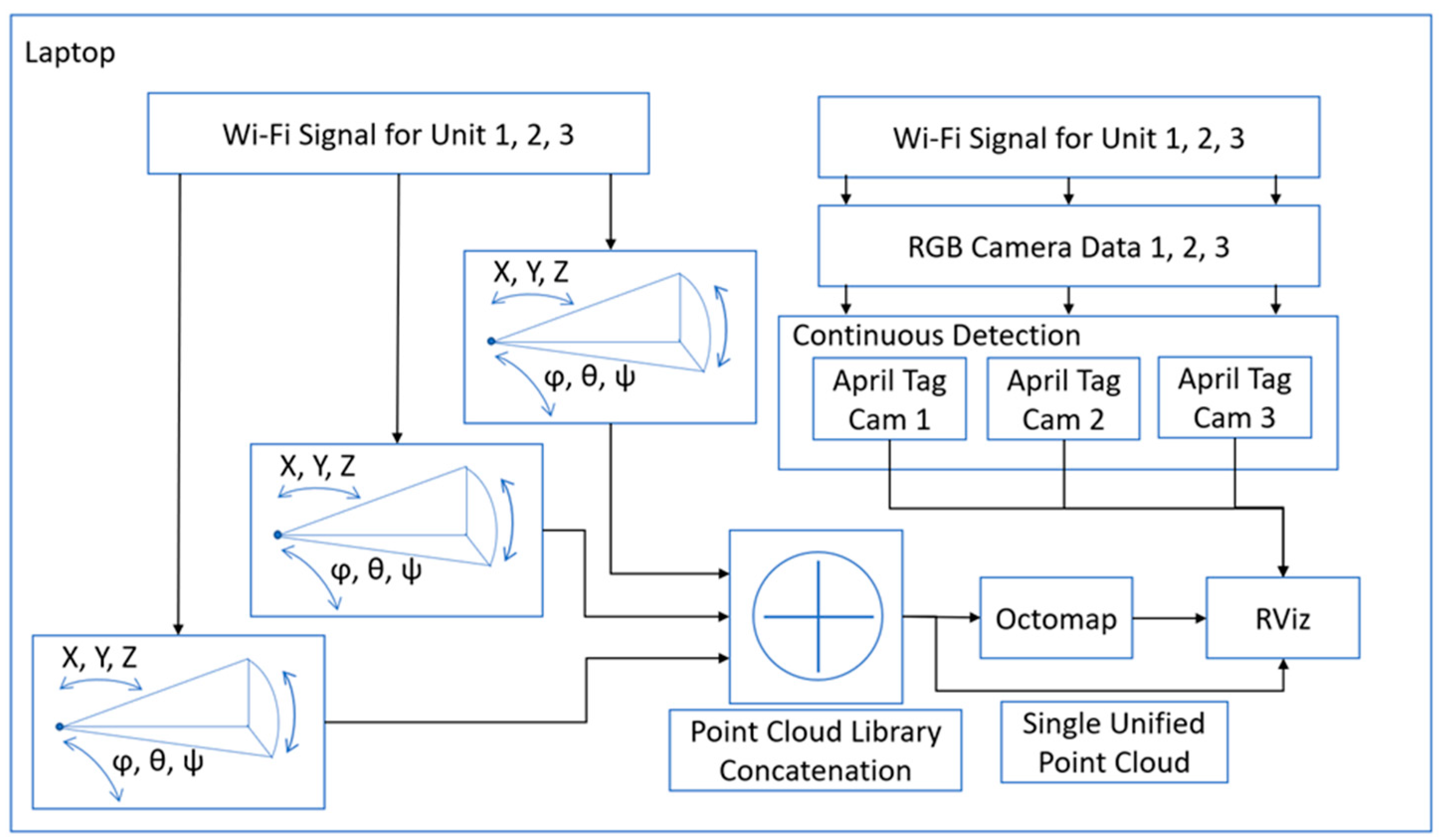
- The Point Cloud Library is an open-source, standalone library designed for the processing and manipulation of 2D/3D images and point clouds.
- Octomap Package is fully ROS integrated and provides an efficient and simple way to implement a 3D occupancy grid mapping system, allowing its setup entirely from a launch file.
- ROS TF Transform allows ROS to display multiple coordinate frames with respect to time.
- April Tag 3 is a comprehensive open-source visual fiducial marker detection algorithm [37]. The function of the tags is to provide a precise 3D position that can be referenced against the point cloud. This ROS wrapper drew this project’s attention due to its easy implementation, for example, the markers edge length can be easily customized in the set-up software to suit any system. Early testing of the package showed that the system could easily detect 12 tags close to one another up to a range of 2 m, with the tags being 4.15 cm to an edge. These are characterized in ROS as 3D coordinate frames representing each detected tag from the perspective of the camera topic provided to the package.
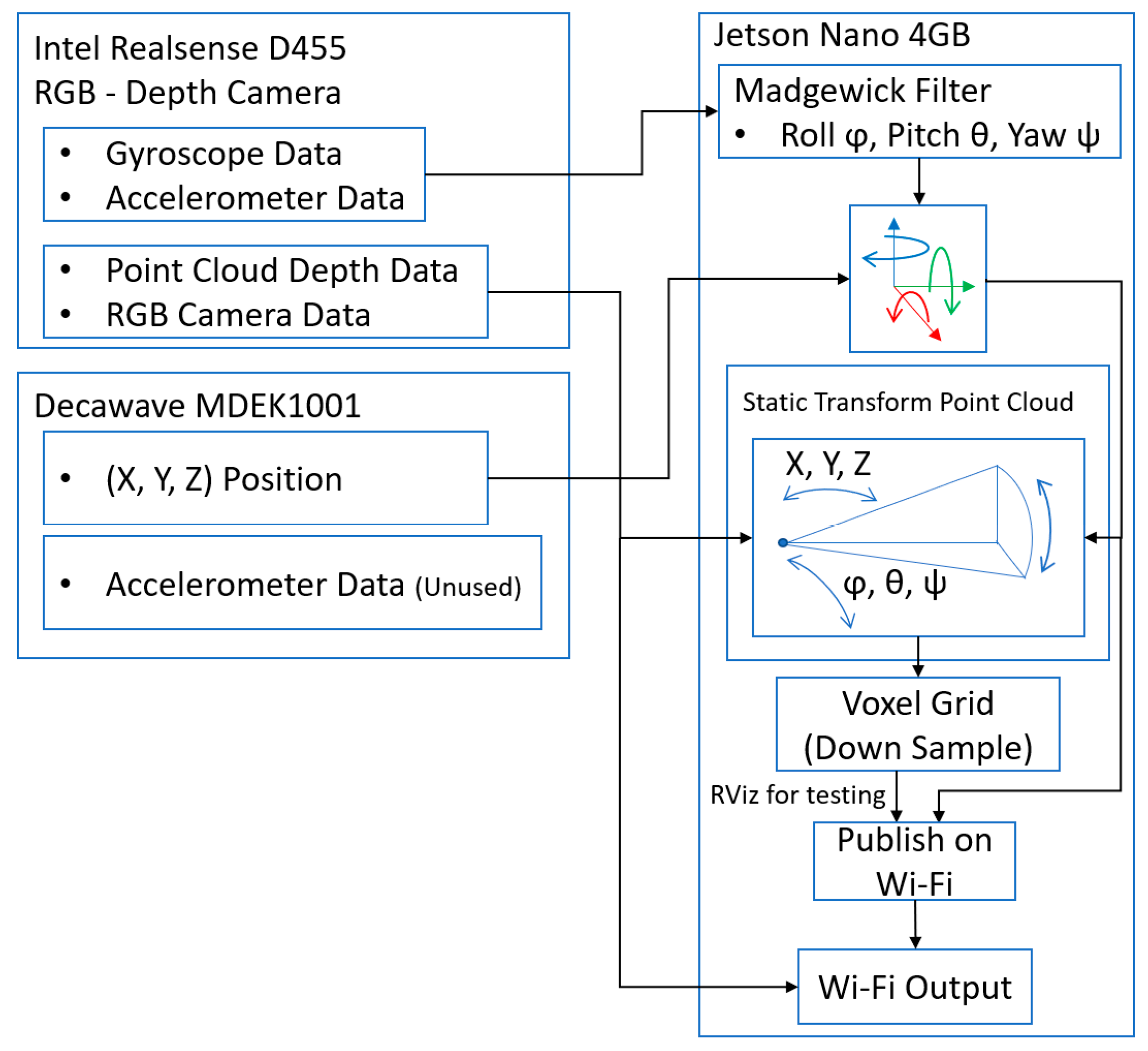
- IMU Tools: Madgewick Filter transforms the acceleration (m/s2) and angular velocity (rad/s) into orientation quaternion data in the ROS sensor_msgs/Imu.msg field; Rqt_reconfigure program was built to create a measurement tool and offset fixer that allowed an “alignment frame” to be generated.
3.2. Unification
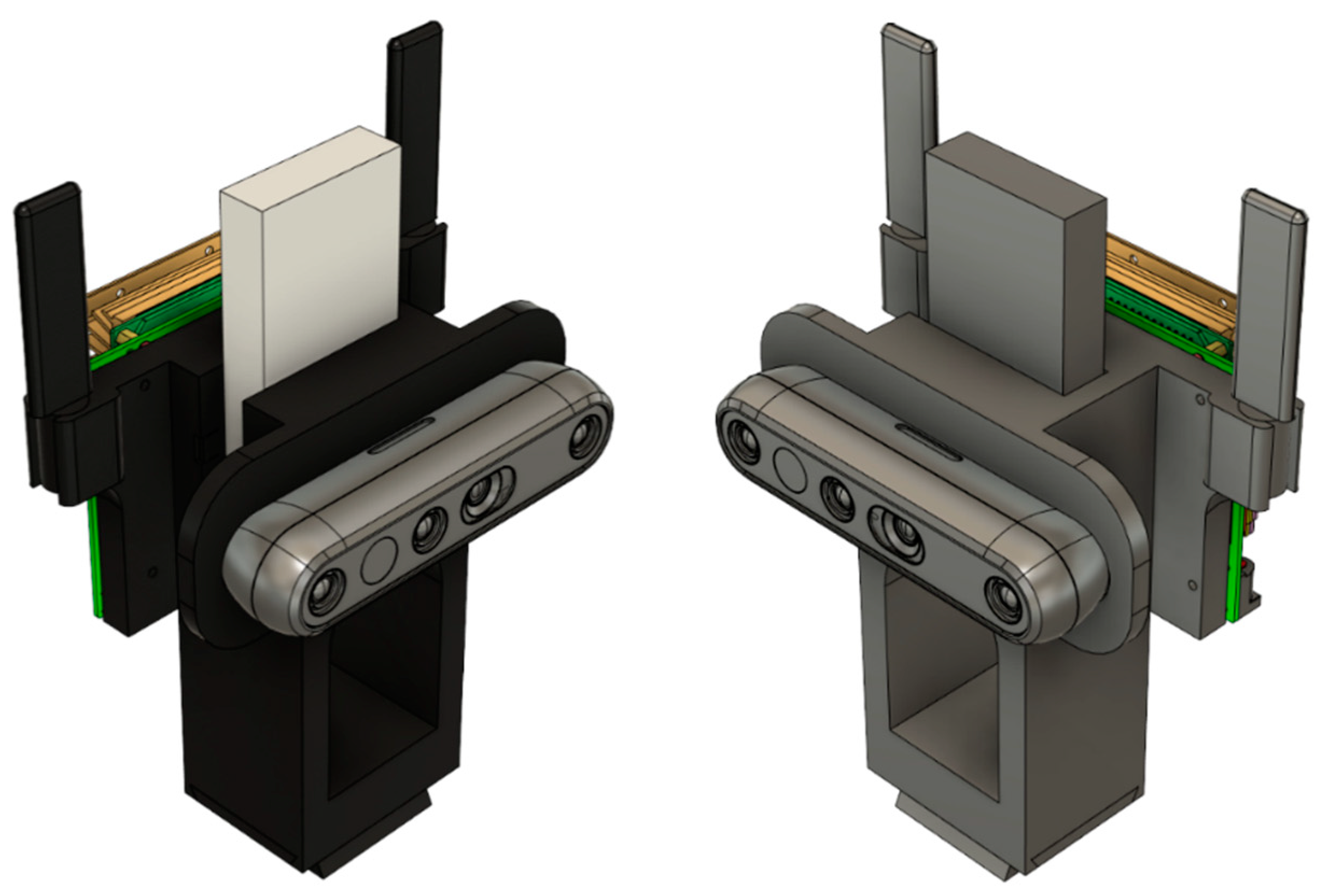
3.2.1. Sensor Platform
3.2.2. Laptop
3.2.3. Subsidiary Design
4. Experimental Studies
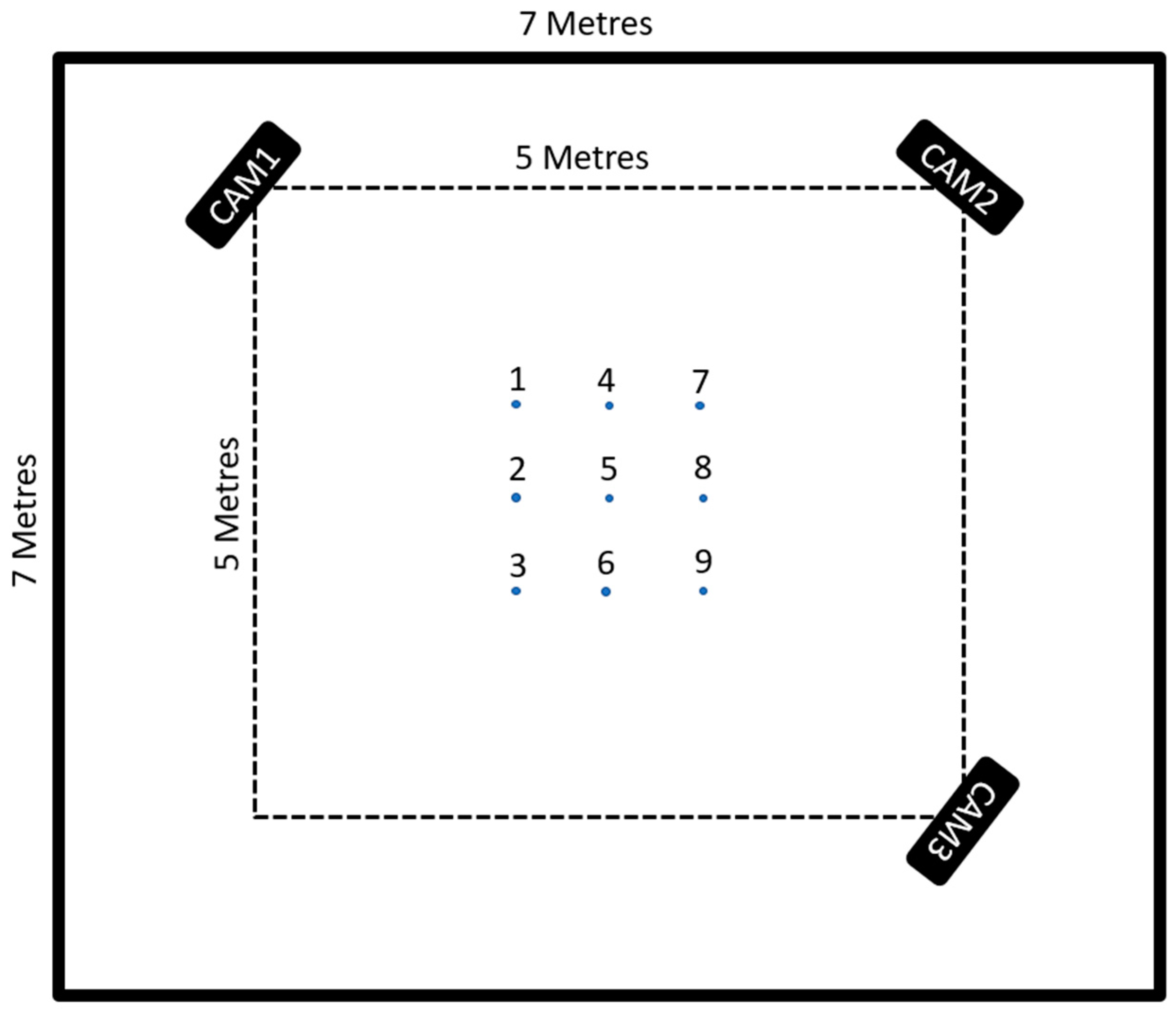
4.1. Set-Up
- Initiator Anchor “Orange” at (0, 0) coordinate.
- Anchor “Pink” (7.13, 0) coordinate.
- Anchor “Blue” (0, 7.05) coordinate.
- Anchor “Yellow” (7.128, 7.15) coordinate—this is due to the room not being completely uniform regarding optimal positions for the anchors.
4.2. Method for Measuring
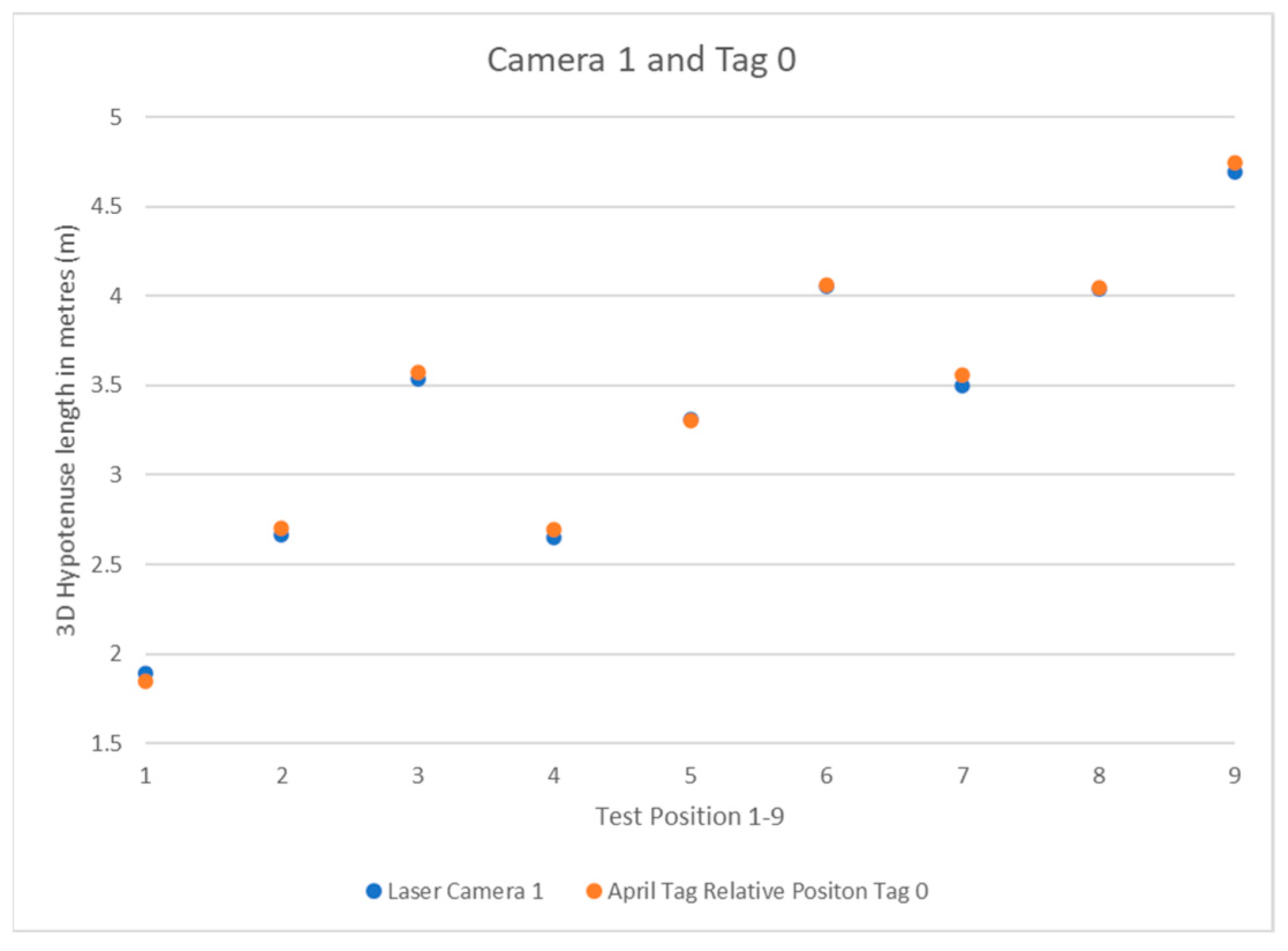
4.3. Experimental Results
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Statement
References
- Win, M.Z.; Davide, D.; Andreas, F.M.; Werner, W.; Zhang, Z.Y. History and applications of UWB. Inst. Electr. Electron. Eng. 2009, 97, 198–204. [Google Scholar] [CrossRef]
- Reed, J. An Introduction to Ultra Wideband Communication Systems; Prentice Hall Press: Hoboken, NJ, USA, 2005. [Google Scholar]
- Krishnan, S.; Pankaj, S.; Zhang, G.P.; Ong, H.W. A UWB based localization system for indoor robot navigation. In Proceedings of the 2007 IEEE International Conference on Ultra-Wideband, Sydney, Australia, 24–26 September 2007. [Google Scholar]
- Segura, M.J.; Vicente, A.M.; Hector, D.P. Mobile robot self-localization system using IR-UWB sensor in indoor environments. In Proceedings of the 2009 IEEE International Workshop on Robotic and Sensors Environments, Lecco, Italy, 6–7 November 2009. [Google Scholar]
- Cheok, K.C.; Radovnikovich, M.; Vempaty, P.; Hudas, G.R.; Overholt, J.L.; Fleck, P. UWB Tracking of Mobile Robots. In Proceedings of the 21st Annual IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Instanbul, Turkey, 26–30 September 2010. [Google Scholar]
- Wang, X.P.; Ma, X.L.; Li, X.X.; Ma, X.Y.; Li, C.X. Target-biased informed trees: Sampling-based method for optimal motion planning in complex environments. J. Comput. Des. Eng. 2022, 9, 755–771. [Google Scholar] [CrossRef]
- Huang, S.; Gamini, D. Robot localization: An introduction. In Wiley Encyclopedia of Electrical and Electronics Engineering; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2016; pp. 1–10. [Google Scholar]
- Kadrovach, B.A.; Gary, B.L. A particle swarm model for swarm-based networked sensor systems. In Proceedings of the 2002 ACM symposium on Applied computing, Madrid, Spain, 10–14 March 2002. [Google Scholar]
- Chan, K.Y.; Tharam, S.D.; Elizabeth, C. An intelligent particle swarm optimization for short-term traffic flow forecasting using on-road sensor systems. IEEE Trans. Ind. Electron. 2012, 60, 4714–4725. [Google Scholar] [CrossRef]
- Huang, S.; Guo, Y.; Zha, S.; Wang, F.; Fang, W. A real-time location system based on RFID and UWB for digital manufacturing workshop. Procedia Cirp. 2017, 63, 132–137. [Google Scholar] [CrossRef]
- Botler, L.; Spörk, M.; Diwold, K.; Römer, K. Direction Finding with UWB and BLE: A Comparative Study. In Proceedings of the 2020 IEEE 17th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Delhi, India, 10–13 December 2020. [Google Scholar]
- Turgut, A.E.; Gokce, F.; Hande, C.; Levent, B.; Erol, S. Kobot: A Mobile Robot Designed Specifically for Swarm Robotics Research; METU-CENG-TR Technical Report 5; Middle East Technical University: Ankara, Turkey, 2007. [Google Scholar]
- Mohammad, M.; Michael, L.; Kohno, R. Ultra Wideband Signals and Systems in Communication Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Shannon, C.E. Une théorie mathématique des télécommunications. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- IEEE Std 802.15. 4z; IEEE Standard for Low-Rate Wireless Networks. Amendment 1: Enhanced Ultra Wideband (UWB) Physical Layers (PHYs) and Associated Ranging Techniques. LAN/MAN Standards Committee, IEEE: Piscataway, NJ, USA, 2020.
- RTLS Technology Comparison. Available online: www.sewio.net/uwb-technology/rtls-technology-comparison (accessed on 15 August 2022).
- Decawave. DWM1000 Module. Available online: https://www.decawave.com/product/dwm1000-module/ (accessed on 20 December 2020).
- Kempke, B.; Pannuto, P.; Campbell, B.; Dutta, P. Surepoint: Exploiting ultra wideband flooding and diversity to provide robust, scalable, high-fidelity indoor localization. In Proceedings of the 14th ACM Conference on Embedded Network Sensor Systems CD-ROM, Stanford CA, USA, 14–16 November 2016. [Google Scholar]
- Simedroni, R.; Puschita, E.; Palade, T.; Dolea, P.; Codau, C.; Buta, R.; Pastrav, A. Indoor positioning using decawave MDEK. In Proceedings of the 2020 International Workshop on Antenna Technology (iWAT), Bucharest, Romania, 25–28 February 2020. [Google Scholar]
- Jiménez, A.R.; Seco, F. Improving the Accuracy of Decawave’s UWB MDEK1001 Location System by Gaining Access to Multiple Ranges. Sensors 2021, 21, 1787. [Google Scholar] [CrossRef] [PubMed]
- Hugh, D.W.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar]
- Nilsson, N.J. A Mobile Automaton: An Application of Artificial Intelligence Techniques; Sri International Menlo Park Ca Artificial Intelligence Center: Menlo Park, CA, USA, 1969. [Google Scholar]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, L. MonoSLAM: Real-time single camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef] [PubMed]
- Raul, M.A.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar]
- Prorok, A.S.M.; Bahr, A.; Martinoli, A. Low-cost collaborative localization for large-scale multi-robot systems. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, 14–19 May 2012. [Google Scholar]
- Prorok, A.S.M. Models and Algorithms for Ultra-Wideband Localization in Single-and Multi-Robot Systems. No. THESIS. EPFL. Available online: http://infoscience.epfl.ch/record/186761/files/EPFL_TH5746.pdf (accessed on 20 December 2020).
- Perez-Grau, F.J.; Caballero, F.; Merino, L.; Viguria, A. Multi-modal mapping and localization of unmanned aerial robots based on ultra-wideband and RGB-D sensing. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Cotera, P.; Velazquez, M.; Cruz, D.; Medina, L.; Bandala, M. Indoor robot positioning using an enhanced trilateration algorithm. Int. J. Adv. Robot. Syst. 2016, 13, 110. [Google Scholar] [CrossRef]
- Hamer, M.; D’Andrea, R. Self-calibrating ultra-wideband network supporting multi-robot localization. IEEE Access 2018, 6, 22292–22304. [Google Scholar] [CrossRef]
- Nguyen, T.M.; Zaini, A.H.; Guo, K.X.; Xie, L.H. An ultra-wideband-based multi-UAV localization system in GPS-denied environments. In Proceedings of the 2016 International Micro Air Vehicles Conference, Beijing, China, 17–21 October 2016. [Google Scholar]
- Nguyen, T.M.; Nguyen, T.H.; Cao, M.Q.; Qiu, Z.R.; Xie, L.H. Integrated uwb-vision approach for autonomous docking of uavs in gps-denied environments. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Almansa, C.M.; Wang, S.L.; Queralta, J.P.; Westerlund, T. Autocalibration of a Mobile UWB Localization System for Ad-Hoc Multi-Robot Deployments in GNSS-Denied Environments. arXiv 2020, arXiv:2004.06762. [Google Scholar]
- Queralta, J.P.; Almansa, C.M.; Schiano, F.; Floreano, D.; Westerlund, T. Uwb-based system for uav localization in gnss-denied environments: Characterization and dataset. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- Decawave. DWM1001 Datasheet. 2017. Available online: https://www.decawave.com/product/dwm1001-module/ (accessed on 20 December 2020).
- Decawave. DWM1001-DEV Datasheet. 2017. Available online: https://www.decawave.com/product/dwm1001-development-board/ (accessed on 20 December 2020).
- Decawave Ltd. DWM1001 System Overview and Performance|DecaWave. Available online: https://www.decawave.com/content/dwm1001-system-overview-and-performance (accessed on 20 December 2020).
- Abbas, S.M.; Aslam, S.; Berns, K.; Muhammad, A. Analysis and improvements in AprilTag based state estimation. Sensors 2019, 19, 5480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Delamare, M.; Boutteau, R.; Savatier, X.; Iriart, N. Static and dynamic evaluation of an UWB localization system for industrial applications. Science 2020, 2, 23. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Jin, Y.; Nguyen, C. Power-efficient switching-based CMOS UWB transmitters for UWB communications and Radar systems. IEEE Trans. Microw. Theory Tech. 2006, 54, 3271–3277. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x | y | |
|---|---|---|
| Position 1 | 1.5 | 1.5 |
| Position 2 | 2.5 | 1.5 |
| Position 3 | 3.5 | 1.5 |
| Position 4 | 1.5 | 2.5 |
| Position 5 | 2.5 | 2.5 |
| Position 6 | 3.5 | 2.5 |
| Position 7 | 1.5 | 3.5 |
| Position 8 | 2.5 | 3.5 |
| Position 9 | 3.5 | 3.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Bulman, H.; Whitley, T.; Li, S. Ultra-Wideband Communication and Sensor Fusion Platform for the Purpose of Multi-Perspective Localization. Sensors 2022, 22, 6880. https://doi.org/10.3390/s22186880
Li C, Bulman H, Whitley T, Li S. Ultra-Wideband Communication and Sensor Fusion Platform for the Purpose of Multi-Perspective Localization. Sensors. 2022; 22(18):6880. https://doi.org/10.3390/s22186880
Chicago/Turabian StyleLi, Chunxu, Henry Bulman, Toby Whitley, and Shaoxiang Li. 2022. "Ultra-Wideband Communication and Sensor Fusion Platform for the Purpose of Multi-Perspective Localization" Sensors 22, no. 18: 6880. https://doi.org/10.3390/s22186880
APA StyleLi, C., Bulman, H., Whitley, T., & Li, S. (2022). Ultra-Wideband Communication and Sensor Fusion Platform for the Purpose of Multi-Perspective Localization. Sensors, 22(18), 6880. https://doi.org/10.3390/s22186880